
Performance of Complex-Valued Multilayer Perceptrons Largely
Depends on Learning Methods
Seiya Satoh
1
and Ryohei Nakano
2
1
National Institute of Advanced Industrial Science and Tech, 2-4-7 Aomi, Koto-ku, Tokyo, 135-0064, Japan
2
Chubu University, 1200 Matsumoto-cho, Kasugai, 487-8501, Japan
Keywords:
Complex-valued Neural Networks, Complex-valued Multilayer Perceptron, Learning Method, Singular
Region, Singularity Stairs Following.
Abstract:
Complex-valued multilayer perceptrons (C-MLPs) can naturally treat complex numbers, and therefore can
work well for the processing of signals such as radio waves and sound waves, which are naturally expressed as
complex numbers. The performance of C-MLPs can be measured by solution quality and processing time. We
believe the performance seriously depends on which learning methods we employ since in the search space
there exist many local minima and singular regions, which prevent learning methods from finding excellent
solutions. Complex-valued backpropagation (C-BP) and complex-valued BFGS method (C-BFGS) are well-
known for learning C-MLPs. Moreover, complex-valued singularity stairs following (C-SSF) has recently
been proposed as a new learning method, which achieves successive learning by utilizing singular regions
and guarantees monotonic decrease of training errors. Through experiments using five datasets, this paper
evaluates how the performance of C-MLPs changes depending on learning methods.
1 INTRODUCTION
Recently the research on complex-valued neural net-
works have expanded in both quality and quantity
(Hirose, 2012). Complex-valued multilayer percep-
tron (C-MLP) can naturally treat complex numbers
and therefore can do function approximation in the
complex-valued world.
We evaluate the performance of C-MLPs by so-
lution quality and processing time. We believe the
performance greatly depends on learning methods
because in the search space there exist many local
minima and singular regions, which prevent learning
methods from finding excellent solutions.
Complex-valued backpropagation (C-BP) was
proposed (Nitta, 1997) as the first learning method
of C-MLP. It performs search using only complex
gradient. Complex-valued BFGS (C-BFGS) (Popa,
2015) is a complex-valued version of quasi-Newton
method with the BFGS update (Nocedal and Wright,
2006). The performance of C-BFGS was reported
(Popa, 2015) to exceed those of other learning meth-
ods such as C-BP and Complex-valued Radial Basis
Function (C-RBF).
Recently a new learning method called Complex-
valued Singularity Stairs Following (C-SSF) has been
proposed. C-SSF performs search successively by in-
crementing the number of hidden units one by one
and inheriting an excellent solution from the previ-
ous learning through singular regions, and thus guar-
antees monotonic decrease of training errors. The
original version of C-SSF was proposed in (Satoh
and Nakano, 2014), but its search ability was lim-
ited and the learning speed was rather slow. Then
the search ability was enhanced and at the same time
the learning efficiency was greatly improved by in-
troducing search pruning and limiting the number
of search routes (Satoh and Nakano, 2015a)(Satoh
and Nakano, 2015b). The latest version (Satoh and
Nakano, 2015b) was used in this paper.
This paper shows how the performance of C-
MLPs depends on learning methods through exper-
iments using three quite different types of learning
methods and five different types of datasets.
This paper is organized as follows. First we intro-
duce the forward computation and singular regions of
C-MLPs in Section 2. Section 3 briefly explains the
new learning method C-SSF together with two exist-
ing methods C-BP and C-BFGS. Section 4 shows ex-
perimental results obtained using three learning meth-
Satoh S. and Nakano R.
Performance of Complex-Valued Multilayer Perceptrons Largely Depends on Learning Methods.
DOI: 10.5220/0006496500450053
In Proceedings of the 9th International Joint Conference on Computational Intelligence (IJCCI 2017), pages 45-53
ISBN: 978-989-758-274-5
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ods and five data sets together with considerations. Fi-
nally Section 5 concludes the paper.
2 COMPLEX-VALUED
MULTILAYER PERCEPTRON
2.1 Forward Computation
In this paper, C-MLP(J) denotes a complex-valued
MLP having J hidden units and a single output
unit. Weights {w
j
}, {w
w
w
j
}, input x
x
x, output f,
teacher signal y can be complex. A column pa-
rameter vector of C-MLP(J) is given below: θ
θ
θ
(J)
=
w
(J)
0
,w
(J)
1
,··· ,w
(J)
J
,w
w
w
(J)
1
T
,··· ,w
w
w
(J)
J
T
T
. Here w
w
w
(J)
j
is a column weight vector from input units to hidden
unit j, and w
(J)
j
is a scalar weight from hidden unit j
to the output. Moreover, a
a
a
T
denotes the transpose of
a
a
a. The output of C-MLP(J) can be shown as follows.
Here z
(J)
j
indicates the output of hidden unit j, and g
denotes an activation function.
f
J
(x
x
x;θ
θ
θ
(J)
) = w
(J)
0
+
J
∑
j=1
w
(J)
j
z
(J)
j
, (1)
z
(J)
j
≡ g(w
w
w
(J)
j
T
x
x
x) (2)
In this paper we employ the following activation func-
tion (Kim and Guest, 1990; Leung and Haykin, 1991),
where c = a + ib and i =
√
−1.
g(c) =
1
1+ e
−c
=
1+ e
−a
cosb+ ie
−a
sinb
1+ 2e
−a
cosb+ e
−2a
(3)
When c is a real number, the function is the well-
known sigmodal one; however, here c is a complex
number, thus, the function can be transformed as
above, which means it gets periodic and unbounded.
We believethis nature plays an important role to allow
C-MLPs to have the flexible capabilities for function
approximation.
Given training data {(x
x
x
µ
,y
µ
),µ = 1,··· , N}, we
want to find θ
θ
θ
(J)
minimizing an objective func-
tion. Our objective function is the following sum-of-
squares error, where
δ
µ
J
denotes the complex conju-
gate of δ
µ
J
.
E
J
=
N
∑
µ=1
δ
µ
J
δ
µ
J
, δ
µ
J
≡ f
J
(x
x
x
µ
;θ
θ
θ
(J)
) −y
µ
(4)
2.2 Singular Regions
There are many singular regions in the search space
of C-MLPs, as is also true with real-valued MLPs.
A singular region can be defined as a flat continuous
area where the gradient is zero. Thus, any gradient-
based search method cannot move any more once it
enters in this region.
Singular regions can be generated using reducibil-
ity mapping from the optimum of C-MLP(J−1) to the
search space of C-MLP(J). Reducibility mapping can
be derived from the concepts of uniqueness and re-
ducibility of C-MLPs (Nitta, 2013).
Let the optimum of C-MLP(J−1) be
b
θ
θ
θ
(J−1)
. Now
consider three reducibility mapping α, β, and γ,
and apply these mappings to the optimum of C-
MLP(J−1) to get the following
b
Θ
Θ
Θ
(J)
α
,
b
Θ
Θ
Θ
(J)
β
, and
b
Θ
Θ
Θ
(J)
γ
.
b
Θ
Θ
Θ
(J)
α
≡ {θ
θ
θ
(J)
| w
(J)
0
= bw
(J−1)
0
, w
(J)
1
= 0,
w
(J)
j
= bw
(J−1)
j−1
,w
w
w
(J)
j
=
b
w
w
w
(J−1)
j−1
,
for j=2,··· ,J} (5)
b
Θ
Θ
Θ
(J)
β
≡ {θ
θ
θ
(J)
| w
(J)
0
+ w
(J)
1
g(w
(J)
1,0
) = bw
(J−1)
0
,
w
w
w
(J)
1
= (w
(J)
1,0
,0,··· ,0)
T
,
w
(J)
j
= bw
(J−1)
j−1
,w
w
w
(J)
j
=
b
w
w
w
(J−1)
j−1
,
for j=2,··· ,J} (6)
b
Θ
Θ
Θ
(J)
γ
≡ {θ
θ
θ
(J)
| w
(J)
0
= bw
(J−1)
0
,
w
(J)
1
+ w
(J)
m
= bw
(J−1)
m−1
,
w
w
w
(J)
1
= w
w
w
(J)
m
=
b
w
w
w
(J−1)
m−1
,
w
(J)
j
= bw
(J−1)
j−1
,w
w
w
(J)
j
=
b
w
w
w
(J−1)
j−1
,
for j ∈ {2,··· , J}\{m},
for m = 2, ··· , J} (7)
Then we have two kinds of singular regions as below.
(1) The intersection of
b
Θ
Θ
Θ
(J)
α
and
b
Θ
Θ
Θ
(J)
β
forms the singu-
lar region
b
Θ
Θ
Θ
(J)
αβ
where weight w
(J)
1,0
is free.
b
Θ
Θ
Θ
(J)
αβ
≡ {θ
θ
θ
(J)
| w
(J)
0
= bw
(J−1)
0
, w
(J)
1
= 0,
w
w
w
(J)
1
= (w
(J)
1,0
,0,··· ,0)
T
,
w
(J)
j
= bw
(J−1)
j−1
,w
w
w
(J)
j
=
b
w
w
w
(J−1)
j−1
,
j= 2,··· ,J} (8)
(2) The other singular region is
b
Θ
Θ
Θ
(J)
γ
, where m =
2,··· ,J. Weights w
(J)
1
and w
(J)
m
must satisfies the fol-
lowing.
w
(J)
1
+ w
(J)
m
= bw
(J−1)
m−1
(9)

Using a free variable q, we can rewrite the above as
follows.
w
(J)
1
= q bw
(J−1)
m−1
, w
(J)
m
= (1 −q) bw
(J−1)
m−1
(10)
3 LEARNING METHODS
3.1 Existing Learning Methods
As existing learning methods, we focus on two meth-
ods: a basic one and an excellent one.
Complex-valued backpropagation (C-BP) (Nitta,
1997) is the most basic learning method of C-MLP.
It carries out search using only the complex gradient.
There can be two ways of processing a step length:
fixed or adaptive. When using the unbounded acti-
vation function such as eq.(3), a step length should
be adaptive, since a fixed step length may guide the
search into undesirable directions. Since we employ
eq.(3) as the activation function, our C-BP always
adapts a step length doing line search.
The Quasi-Newton method requires only the gra-
dient at each iteration, but by measuring the changes
in gradients, it calculates the approximate of the in-
verse Hessian to make the method much better than
the steepest descent or sometimes more efficient than
the Newton method (Nocedal and Wright, 2006). Al-
though there are several ways of approximating the
inverse Hessian, the BFGS update is considered to
work best. Complex-valued BFGS (C-BFGS) (Popa,
2015) is a complex-valued version of quasi-Newton
method with the BFGS update. The performance of
C-BFGS was reported to exceed those of other exist-
ing learning methods.
3.2 New Learning Method: C-SSF
A new learning method called Complex-valued Sin-
gularity Stairs Following (C-SSF) was recently pro-
posed, and then two kinds of modifications have been
done to significantly improve its performance. The
latest version is shown in (Satoh and Nakano, 2015b).
C-SSF starts search from C-MLP(J =1) and then
gradually increases the number J of hidden units one
by one until the specified number J
max
.
When searching C-MLP(J), the method begins
with applying reducibility mapping to the optimum
of C-MLP(J−1) to get two kinds of singular regions
b
Θ
Θ
Θ
(J)
αβ
and
b
Θ
Θ
Θ
(J)
γ
. Since the gradient is zero all over the
singular region, C-SSF calculates eigenvalues of the
Hessian to find descending directions. Following the
direction of the eigenvector corresponding to a neg-
ative eigenvalue, the method can descend the search
space. After leaving the singular regions, the method
employs C-BFGS as a search engine from then on.
The processing time gets larger as the number J
of hidden units gets large. This is natural because
the number of search routes increases as J gets large.
To make C-SSF much faster without deteriorating so-
lution quality, the following speeding-up techniques
were introduced (Satoh and Nakano, 2015b).
One is search pruning. In the search, we often ob-
tain duplicate solutions. Considering that duplicates
are obtained via much the same search routes, we in-
troduced search pruning to speed up the method by
monitoring the redundancy of search routes. In the
search of C-MLP(J), search points are stored at a cer-
tain interval (100 steps in our experiments) and the
current search line segment is checked at the certain
interval to see if it is close enough to any of the previ-
ous search line segments. If the condition holds, the
current search route is instantly pruned.
The other is to set the upper bound S
max
on the
number of search routes. That is, the number of the
search routes for each C-MLP(J) is limited by S
max
.
To implement this, we calculate eigenvalues of all ex-
pected initial points on the singular regions. Then,
we pick up the limited number of negative eigenval-
ues in ascending order, and perform search using their
eigenvectors. We assume the larger convex curva-
ture at a starting point may suggest the better solution
quality at the end of the search.
4 EXPERIMENTS
We performed experiments to evaluate how the per-
formance of C-MLPs depends on learning methods
using three quite different types of learning methods
and five different types of datasets.
As learning methods, we employed C-BP, C-
BFGS, and C-SSF. As described previously, they per-
form search in quite different paradigms. Our C-BP
always calculates a reasonable step length in the di-
rection of the gradient. Both C-BP and C-BFGS run
100 times independently changing initial weights for
each J. As for C-SSF, the upper bound of search
routes S
max
was set to 100 for each J, the free param-
eters of singular regions were set as follows: w
(J)
1,0
=
−1, 0, 1 and q = 0.5, 1.0, 1.5.
The common learning conditions are mentioned
below. The number of hidden units was changed as
J = 1, ··· ,20. As for initial weights, real and imag-
inary parts of each weight were randomly generated
from the range of (0, 1). Each method was termi-
nated if the number of sweeps exceeded 1,000 or the
step length of line search was smaller than 10
−8
.

As datasets, we used the following five: the
Lorenz chaotic system, two artificial data, linear and
nonlinear channel equalizations. Every dataset was
normalized as shown below to make learning easier.
x ← x/max(abs(x)), (11)
y ← (y−mean(y))/std(y) (12)
Then, for two artificial data, small Gaussian noise
with zero mean and 0.01 standard deviation was
added to each part of every teacher signal in a dataset.
Training error and test error are shown as the fol-
lowing mean squared error (MSE).
MSE =
1
2N
N
∑
µ=1
δ
µ
δ
µ
, δ
µ
= f
µ
−y
µ
(13)
4.1 Experiment 1
The Lorenz system (Lorenz, 1963) is defined by the
following equations.
dx
dt
= σ(y−x) (14)
dy
dt
= x(ρ−z) −y (15)
dz
dt
= xy−βz (16)
The system is known for having chaotic solutions
called the Lorenz attractor for certain parameter val-
ues and initial conditions. Here system parameters σ,
ρ, and β were set to be 10, 28, and 8/3 respectively.
The initial values of x, y, and z were set to be −10,
−10, and 30 respectively.
Our preliminary experiments showed that one-
step ahead prediction can be accurately realized by
using C-MLPs; thus, we estimate p
t+∆t
by using cor-
rect p
t
(≡ x
t
+ i y
t
) as input, where ∆t was set to be
0.05. Note that z
t
was used to generate data, but was
not used in our prediction model. Sizes of training
and test data were set to be N
tr
= 500 and N
test
= 500.
Test data starts right after training data.
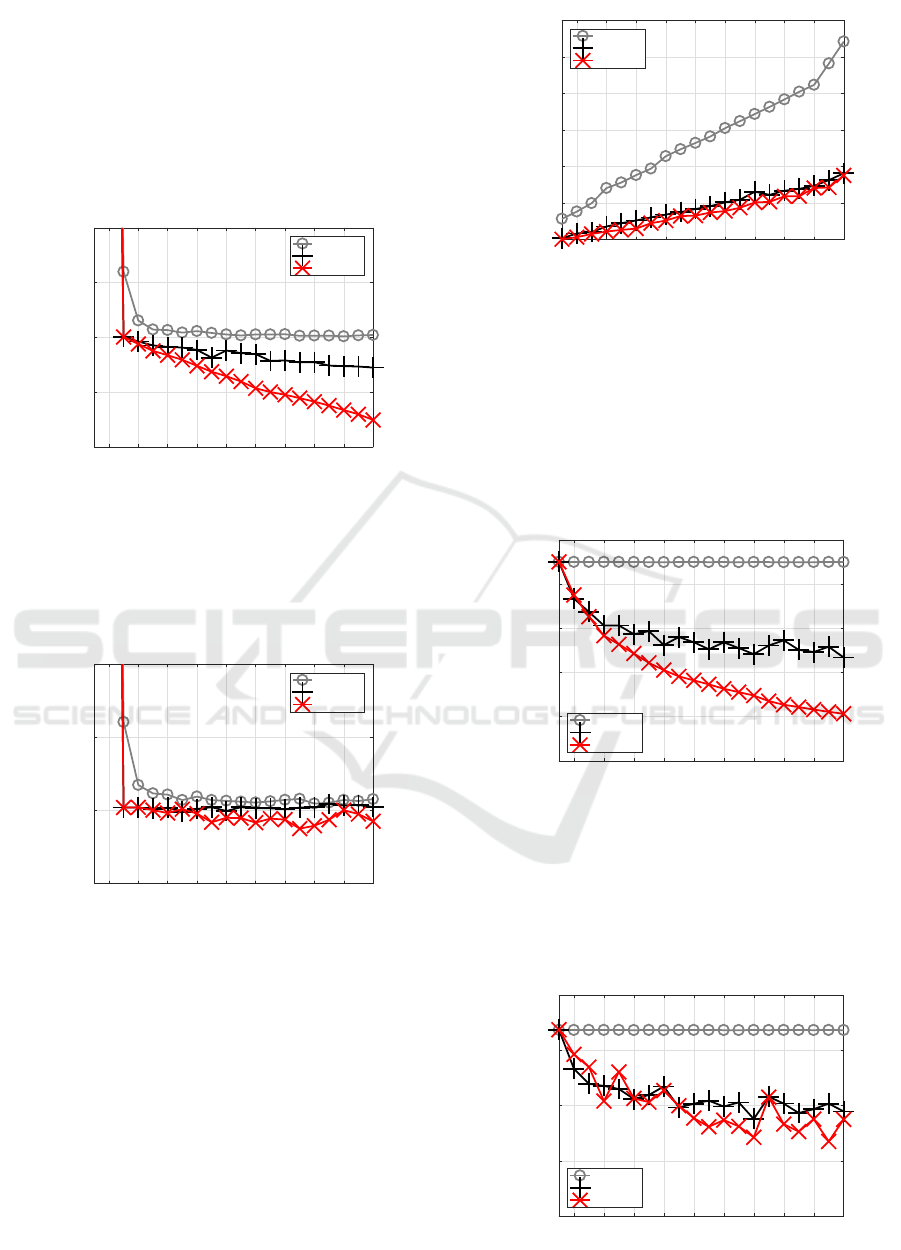
Figure 1 shows the smallest training MSE of each
method for each J. When J got larger, C-BP could not
decrease training error at all, C-BFGS could decrease
the error in a non-monotonic way, and C-SSF mono-
tonically decreased the error reaching the smallest.
Figure 2 shows the smallest test MSE of each
method for each J. C-BP stayed at a high level, C-
BFGS showed smaller test errors than C-BP, and C-
SSF got better test errors than C-BFGS, showing the
smallest around high J.
Figure 3 shows CPU time required by each
method for each J. C-BP spent the largest time since
it could not converge spending maximum time, C-
BFGS was more efficient and faster than C-BP, and
2 4 6 8 10 12 14 16 18 20
J
0
0.01
0.02
0.03
MSE
tr
C-BP
C-BFGS
C-SSF1.3
Figure 1: Training errors for Experiment 1.
2 4 6 8 10 12 14 16 18 20
J
0
0.01
0.02
0.03
0.04
MSE
test
C-BP
C-BFGS
C-SSF1.3
Figure 2: Test errors for Experiment 1.
C-SSF was the fastest since it inherited an excellent
starting point for each J.
2 4 6 8 10 12 14 16 18 20
J
0
200
400
600
800
1000
1200
Processing time (sec)
C-BP
C-BFGS
C-SSF1.3
Figure 3: Processing time for Experiment 1.
4.2 Experiment 2
A complicated artificial dataset was generated using
the following function having four complex variables
and a reciprocal term. This dataset was used as a
benchmark (Savitha et al., 2009)(Popa, 2015).
f(z
1
,z
2
,z
3
,z
4
) =
1
1.5
z
3
+ 10z
1
z
4
+
z
2
2
z
1
(17)
0.1 ≤|z
1
| ≤ 1, |z
k
| ≤ 1, k = 2,3,4 (18)
Sizes of training and test data were set to be N
tr
=
3000 and N
test
= 1000.
Figure 4 shows the smallest training MSE of each
method for each J. When J got larger, C-BP de-
creased training error with a limited amount only at
smaller Js, C-BFGS could decrease the error even fur-
ther in a non-monotonic way, and C-SSF monotoni-
cally decreased the error achieving the smallest.
2 4 6 8 10 12 14 16 18 20
J
0.01
0.02
0.03
0.04
0.05
MSE
tr
C-BP
C-BFGS
C-SSF1.3
Figure 4: Training errors for Experiment 2.
Figure 5 shows the smallest test MSE of each method
for each J. C-BP decreased test error to some extent,
C-BFGS showed a bit smaller test error than C-BP,
and C-SSF got a bit better error than C-BFGS, show-
ing the smallest at J=15.
2 4 6 8 10 12 14 16 18 20
J
0.02
0.03
0.04
0.05
MSE
test
C-BP
C-BFGS
C-SSF1.3
Figure 5: Test errors for Experiment 2.
Figure 6 shows CPU time required by each method.
C-BP required the largest time, spending more as J
got larger, C-BFGS was more efficient than C-BP, and
C-SSF was slightly better than C-BFGS.
4.3 Experiment 3
Another complicated artificial dataset was generated
using the following function having two complex
variables and treating separately the real and imagi-
nary parts. This dataset was also used as a benchmark
(Huang et al., 2008)(Popa, 2015).
f(z) = e
iIm(z)
(1−Re(z)
2
−Im(z)
2
) (19)
2 4 6 8 10 12 14 16 18 20
J
0
500
1000
1500
2000
2500
3000
Processing time (sec)
C-BP
C-BFGS
C-SSF1.3
Figure 6: Processing time for Experiment 2.
Sizes of training and test data were set to be N
tr
=
3000 and N
test
= 1000.
Figure 7 shows the smallest training MSE of each
method for each J. When J got larger, C-BP could not
decrease training error at all, C-BFGS could decrease
the error to some extent in a non-monotonic way, and
C-SSF monotonically decreased the error obtaining
the smallest.
2 4 6 8 10 12 14 16 18 20
J
0
0.1
0.2
0.3
0.4
0.5
MSE
tr
C-BP
C-BFGS
C-SSF1.3
Figure 7: Training errors for Experiment 3.
Figure 8 shows the smallest test MSE of each method
for each J. C-BP stayed at a high level, C-BFGS
showed much smaller test errors than C-BP, and C-
SSF got better test errors than C-BFGS, showing the
smallest around higher J.
2 4 6 8 10 12 14 16 18 20
J
0.1
0.2
0.3
0.4
0.5
MSE
test
C-BP
C-BFGS
C-SSF1.3
Figure 8: Test errors for Experiment 3.

Figure 9 shows CPU time required by each method.
C-BP required the largest time, spending more as J
got larger, C-BFGS was much faster than C-BP, and
C-SSF was the fastest.
2 4 6 8 10 12 14 16 18 20
J
0
500
1000
1500
2000
2500
Processing time (sec)
C-BP
C-BFGS
C-SSF1.3
Figure 9: Processing time for Experiment 3.
4.4 Experiment 4
One important application of C-MLPs is in equaliza-
tion of quadrature amplitude modulation (QAM) of
complex-valued signals in linear or nonlinear chan-
nels. We consider 4-QAM linear channel equalization
(Chen et al., 1994)(Popa, 2015). The transfer function
of the linear channel was given as follows.
H(z) = (0.7409 −0.7406i)(1−(0.2−0.1i)z
−1
)
×(1−(0.6−0.3i)z
−1
) (20)
= 0.740900−0.740600i
−(0.296480−0.888840i)z
−1
−(0.022191+ 0.155562i)z
−2
(21)
The inputs to the channel were randomly generated
from the set s(k) = {±1 ±i}, and the output of the
channel was given as below.
o
∗
(k) = (0.740900−0.740600i)s(k)
−(0.296480−0.888840i)s(k−1)
−(0.022191+ 0.155562i)s(k−2)(22)
We observe the following o(k) including Gaussian
noise. Here n
R
(k) and n
I
(k) were generated from
Gaussian with zero mean and variance σ
2
.
o(k)= o
∗
(k)+n(k), n(k) ≡n
R
(k)+in
I
(k) (23)
Variance σ
2
was decided to make the following SNR
(signal-to-noise ratio) equal to 15 dB.
SNR = 10log
10
∑
N
k=1
|o
∗
(k)|
2
∑
N
k=1
|n(k)|
2
(24)
Sizes of training and test data were set to be N
tr
=
5000 and N
test
= 10000.
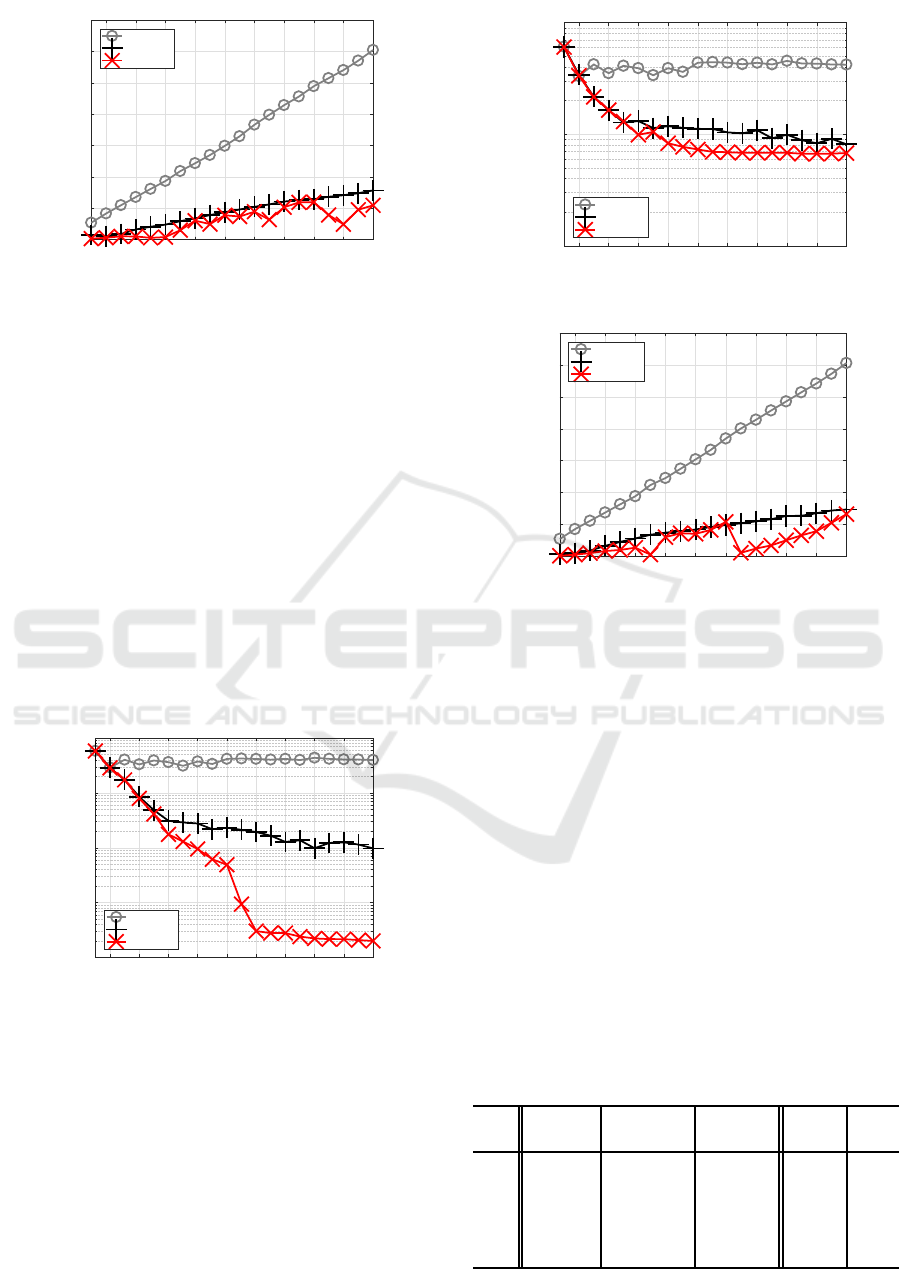
Figure 10 shows the smallest training MSE of
each method for each J. When J got larger, C-BP de-
creased training error only with a small amount in a
rather bumpyway, C-BFGS nicely decreased the error
as J got larger, and C-SSF monotonically decreased
the error even further achieving the smallest.
2 4 6 8 10 12 14 16 18 20
J
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
MSE
tr
C-BP
C-BFGS
C-SSF1.3
Figure 10: Training errors for Experiment 4.
Figure 11 shows the smallest test MSE of each
method for each J. C-BP stayed around a high level,
C-BFGS decreased test error achieving smaller errors
than C-BP, and C-SSF got better test errors than C-
BFGS as J got larger, obtaining the smallest around
high Js.
2 4 6 8 10 12 14 16 18 20
J
0.05
0.1
0.15
0.2
MSE
test
C-BP
C-BFGS
C-SSF1.3
Figure 11: Test errors for Experiment 4.
Figure 12 shows CPU time required by each method
for each J. C-BP required the largest time, spending
more and more as J got larger, C-BFGS was much
faster than C-BP, and C-SSF was a bit faster than C-
BFGS.
4.5 Experiment 5
We consider complex-valued4-QAM nonlinear chan-
nel equalization (Savitha et al., 2009)(Popa, 2015).
The inputs to the channel were randomly generated
from the set s(k) = {±1±i}, and the output o
∗
(k) of
2 4 6 8 10 12 14 16 18 20
J
0
1000
2000
3000
4000
5000
6000
7000
Processing time (sec)
C-BP
C-BFGS
C-SSF1.3
Figure 12: Processing time for Experiment 4.
the channel was given as below.
o
∗
(k) = z(k) + 0.1z(k)
2
+ 0.05z(k)
3
(25)
z(k) = (0.34−0.27i)s(k)+(0.87+0.43i)s(k−1)
+(0.34−0.21i)s(k−2) (26)
We observe o(k) including Gaussian noise. The noise
level was set in the same way as in section 4.4.
o(k) = o
∗
(k) + n
R
(k) + in
I
(k) (27)
Sizes of training and test data were set to be N
tr
=
5000 and N
test
= 10000.
Figure 13 shows the smallest training MSE of
each method for each J. When J got larger, C-BP
stayed at a high level, C-BFGS decreased the error to
some extent, and C-SSF monotonically decreased the
error achieving the smallest around high Js.
2 4 6 8 10 12 14 16 18 20
J
10
-5
10
-4
10
-3
10
-2
10
-1
MSE
tr
C-BP
C-BFGS
C-SSF1.3
Figure 13: Training errors for Experiment 5.
Figure 14 shows the smallest test MSE of each
method for each J. C-BP stayed around a high level,
C-BFGS obtained much smaller errors than C-BP, and
C-SSF got a bit better test errors than C-BFGS, ob-
taining the smallest around high Js.
Figure 15 shows CPU time required by each
method. C-BP required the largest, spending more
as J got larger, C-BFGS was much faster than C-BP,
and C-SSF was a bit faster than C-BFGS.
2 4 6 8 10 12 14 16 18 20
J
10
-3
10
-2
10
-1
MSE
test
C-BP
C-BFGS
C-SSF1.3
Figure 14: Test errors for Experiment 5.
2 4 6 8 10 12 14 16 18 20
J
0
1000
2000
3000
4000
5000
6000
7000
Processing time (sec)
C-BP
C-BFGS
C-SSF1.3
Figure 15: Processing time for Experiment 5.
4.6 Considerations
Our experimental results are summarized focusing
on how the performance of C-MLPs depends on
learning methods. In more detail, we consider the
following: best training quality, average training
quality, generalization, processing time.
(1) Best training quality:
Table 1 shows the minimum training MSE of each
learning method for each dataset. For any dataset C-
SSF got the smallest, followed by C-BFGS and C-BP.
The ratio of C-BP to C-SSF indicates how many times
the minimum training MSE of C-BP is bigger than
that of C-SSF; it was between 2.0 and 1450. More-
over, the ratio of C-BFGS to C-SSF was between 1.6
and 49.
Table 1: Minimum training errors.
C-BP C-BFGS C-SSF ratio ratio
data
A B C A/C B/C
1 0.0286 0.0144 5.01e-3 5.72 2.87
2
0.0302 0.0245 0.015 2.02 1.64
3 0.449 0.234 0.107 4.22 2.20
4
0.143 0.0786 0.0376 3.80 2.09
5 0.0291 9.75e-4 2.00e-5 1450 48.7

(2) Average training quality:
Tables 2 and 3 show the average and standard devi-
ation respectively over 100 training MSEs of the op-
timal model (see Table 5) selected by each method
for each dataset. As for the averages, C-SSF achieved
the smallest for any dataset, followed by C-BFGS and
C-BP. The ratio of C-BP to C-SSF stretched between
1.7 and 2260, and the ratio of C-BFGS to C-SSF was
between 1.5 and 106. As for the standard deviations,
C-SSF achieved the smallest for most datasets, which
is reasonable since C-SSF always starts search from
good enough points.
Table 2: Averages over training errors of the optimal model.
C-BP C-BFGS C-SSF ratio ratio
data
A B C A/C B/C
1 0.0299 0.0221 5.84e-3 5.12 3.79
2
0.0325 0.0293 0.0194 1.68 1.51
3 0.450 0.330 0.114 3.95 2.90
4
0.164 0.0989 0.0443 3.69 2.23
5 0.0489 2.28e-3 2.16e-5 2260 106
Table 3: Standard deviations over training errors of the op-
timal model.
C-BP C-BFGS C-SSF ratio ratio
data A B C A/C B/C
1 8.28e-4 0.00212 6.59e-5 12.6 32.1
2
0.00131 4.31e-4 1.51e-4 8.68 2.85
3 1.52e-4 0.0340 9.49e-4 0.16 35.8
4
0.00794 0.00526 6.50e-4 12.2 8.08
5 0.00572 8.29e-4 0 Inf Inf
(3) Generalization:
Table 4 summarizes the minimum test MSE of each
method for each dataset. For any dataset C-SSF
achieved the smallest test MSE, i.e., the best gener-
alization, and C-BFGS got smaller test MSE than C-
BP. The ratio of C-BP to C-SSF spread out between
1.1 and 5.0, while the ratio of C-BFGS to C-SSF was
between 1.1 and 1.7.
Table 4: Minimum test errors.
C-BP C-BFGS C-SSF ratio ratio
data A B C A/C B/C
1 0.0359 0.0241 0.0139 2.59 1.74
2 0.0309 0.0298 0.0275 1.12 1.08
3
0.437 0.276 0.235 1.86 1.17
4 0.147 0.109 0.0769 1.91 1.42
5
0.0332 8.11e-3 6.68e-3 4.97 1.21
Table 5 shows the number of hidden units of the op-
timal model selected by each learning method for
each dataset. The optimal model indicates C-MLP(J)
showing the minimum test MSE. The table shows
how the optimal model differs depending on learning
methods.
Table 5: The numbers of hidden units of the optimal models
selected by learning methods.
data C-BP C-BFGS C-SSF
1 2 15 18
2
16 7 15
3 6 14 19
4 9 17 17
5
2 20 17
(4) Processing time:
Table 6 shows average numbers of training iterations
required by each learning method. For each dataset C-
BP reached the maximum iterations (sweeps), which
means C-BP was on the way in the search. For each
dataset C-SSF required the smallest number of itera-
tions until convergence. The ratio of C-BFGS to C-
SSF was between 1.7 and 3.6.
Table 7 summarizes total processing time (hr:
min: sec) of each method for each dataset. For any
dataset C-SSF was the fastest, and C-BFGS was faster
than C-BP. The ratio of C-BP to C-SSF spread be-
tween 3.7 and 7.4, while the ratio of C-BFGS to C-
SSF was between 1.2 and 2.3. The reason why C-
SSF was faster than C-BFGS may come from the fact
that the number of iterations required by C-SSF was
a few times smaller than that of C-BFGS. Besides,
the why C-BFGS was faster than C-BP in spite of its
higher complexity may be derived from the situation
that line search required by C-BFGS was much lighter
and faster than that of C-BP.
Table 6: Average numbers of training iterations.
C-BP C-BFGS C-SSF ratio ratio
data A B C A/C B/C
1 1000 937 291 3.44 3.22
2 1000 949 569 1.76 1.67
3
1000 940 264 3.8 3.57
4 1000 873 472 2.12 1.85
5
1000 890 338 2.96 2.64
Table 7: Total processing time.
C-BP C-BFGS C-SSF ratio ratio
data
A B C A/C B/C
1 3:28:53 1:17:38 0:38:34 5.42 2.01
2
7:37:25 2:28:14 2:02:14 3.74 1.21
3 6:17:17 1:57:55 0:50:55 7.41 2.32
4
17:56:38 4:47:45 3:12:59 5.58 1.49
5 18:03:17 4:38:47 2:43:39 6.62 1.70

5 CONCLUSIONS
The paper evaluated how the performance of C-MLPs
depends on learning methods. We employed three
quite different methods, C-BP, C-BFGS, and C-SSF,
and used five datasets. Performance was evaluated in
terms of minimum and average training errors, mini-
mum test error, and processing time. Our experiments
showed rather definite ordering: that is, at each evalu-
ation item C-SSF was the best, C-BFGS was the sec-
ond, and C-BP was the third. Although C-BFGS was
the best in most cases in (Popa, 2015), C-SSF was
not tried in the work. Moreover, the optimal models
selected by learning methods considerably differed
from each other. In the future we will investigatemore
using more datasets.
ACKNOWLEDGEMENTS
This work was supported by Grants-in-Aid for Scien-
tific Research (C) 16K00342.
REFERENCES
Chen, S., McLaughlin, C., and Mulgrew, B. (1994).
Complex-valued radial basis function network, part ii:
Application to digital communications channel equal-
isation. Signal Process., 36(2):175–188.
Hirose, A. (2012). Complex-Valued Neural Networks.
Springer, 2nd edition.
Huang, G.-B., Li, M.-B., Chen, L., and Siew, C.-K.
(2008). Incremental extreme learning machine with
fully complex hidden nodes. Neurocomput., 71:576–
583.
Kim, M. and Guest, C. (1990). Modification of backpropa-
gation networks for complex-valued signal processing
in frequency domain. In Proc. IJCNN’90, volume 3,
pages 27–31.
Leung, H. and Haykin, S. (1991). The complex backprop-
agation algorithm. IEEE Trans. Signal Processing,
39(9):2101–2104.
Lorenz, E. (1963). Deterministic nonperiodic flow. Journal
of the Atmospheric Sciences, 20(2):130–141.
Nitta, T. (1997). An extension of the back-propagation
algorithm to complex numbers. Neural Networks,
10(8):1391–1415.
Nitta, T. (2013). Local minima in hierarchical structures of
complex-valued neural networks. Neural Networks,
43:1–7.
Nocedal, J. and Wright, S. (2006). Numerical optimization.
Springer.
Popa, C.-A. (2015). Quasi-Newton learning methods
for complex-valued neural networks. In Proc. Int.
Joint Conf. on Neural Networks (IJCNN 2015), pages
1142–1149.
Satoh, S. and Nakano, R. (2014). Complex-valued mul-
tilayer perceptron search utilizing singular regions of
complex-valued parameter space. In Proc. Int. Conf.
on Artificial Neural Networks (ICANN 2014), pages
315–322.
Satoh, S. and Nakano, R. (2015a). Complex-valued mul-
tilayer perceptron learning using singular regions and
search pruning. In Proc. Int. Joint Conf. on Neural
Networks (IJCNN 2015), pages 1195–1200.
Satoh, S. and Nakano, R. (2015b). A yet faster version of
complex-valued multilayer perceptron learning using
singular regions and search pruning. In Proc. NCTA,
pages 122–129.
Savitha, R., Suresh, S., Sundararajan, N., and Saratchan-
dran, P. (2009). A new learning algorithm with loga-
rithmic performance index for complex-valued neural
networks. Neurocomputing, 72:3771–3781.
