
Self-learning Smart Cameras
Harnessing the Generalization Capability of XCS
Anthony Stein
1
, Stefan Rudolph
1
, Sven Tomforde
2
and J
¨
org H
¨
ahner
1
1
Organic Computing Group, University of Augsburg, Eichleitnerstr 30, 86159 Augsburg, Germany
2
Intelligent Embedded Systems, University of Kassel, Wilhelmsh
¨
oher Allee 73, 34121 Kassel, Germany
Keywords:
Organic Computing, Self-x, Self-learning, Self-adaptive, Reinforcement Learning, Smart Camera, Smart
Camera Network, Surveillance Camera, Learning Classifier System, Extended Classifier System, Q-learning.
Abstract:
In this paper, we show how an evolutionary rule-based machine learning technique can be applied to tackle
the task of self-configuration of smart camera networks. More precisely, the Extended Classifier System
(XCS) is utilized to learn a configuration strategy for the pan, tilt, and zoom of smart cameras. Thereby,
we extend our previous approach, which is based on Q-Learning, by harnessing the generalization capability
of Learning Classifier Systems (LCS), i.e. avoiding to separately approximate the quality of each possible
(re-)configuration (action) in reaction to a certain situation (state). Instead, situations in which the same
reconfiguration is adequate are grouped to one single rule. We demonstrate that our XCS-based approach
outperforms the Q-learning method on the basis of empirical evaluations on scenarios of different severity.
1 INTRODUCTION
The possible applications for networked cameras are
manifold (Hoffmann et al., 2008). The most common
use cases today are the detection of intruders in pri-
vate areas (e.g. the home of a person or research facil-
ities with classified prototypes) and the surveillance
of high risk areas (e.g the track area in train stations
or heavy machines in factories). But, there are also
future applications such as huge parking places where
the cameras could spot empty parking lots in order to
guide the drivers to them, or the monitoring of persons
that are potentially in need, such as nursing children
or ill people.
Today’s commercially available surveillance camera
systems consist of cameras with pan, tilt, zoom (PTZ)
capabilities. The captured video data is streamed to a
central control room where security staff tries to mon-
itor a large amount of this stream in parallel to identify
critical situations that require countermeasures. In
most cases, security staff is not able to fulfill this task
properly due to natural limitations in terms of han-
dling huge amounts of data simultaneously, e.g. mul-
tiple video streams at the same time, and the ability
to concentrate over long time, e.g. an entire working
day.
Previous work has addressed these issues by intro-
ducing smart cameras (Valera and Velastin, 2005).
These cameras include a computational unit that al-
lows to fulfill several tasks such as image process-
ing, photogrammetry, or object tracking. Intervention
of humans is optional, but not required for an effi-
cient service of the system. Furthermore, most often
smart cameras form a network, resulting in a so-called
Smart Camera Network (SCN) (Rinner et al., 2008).
That introduces the additional challenge of coordina-
tion between the cameras. Such systems are mostly
designed to be self-organizing since they face the re-
quirement of only local interaction and decision mak-
ing since it is important to avoid problems that cannot
be computed in the given time limits or create huge
network loads. For example, in a huge smart cam-
era network, it is not possible to find the globally best
alignment of all cameras in a short time span.
To enable a local decision making, Rudolph et al.
(2014) introduced the possibility of self-learning al-
gorithms for the alignment problem, i.e., to determine
the optimal PTZ configuration for a certain situation.
Here, we pick this work up and improve their previous
results by introducing the Extended Classifier System
(XCS) as control algorithm.
Accordingly, the contribution of this paper is the ap-
plication of a further, more sophisticated reinforce-
ment learning technique – the XCS – in order to im-
prove the self-learning capability of smart cameras.
Based on the results of the conducted studies, we also
Stein A., Rudolph S., Tomforde S. and HÃd’hner J.
Self-learning Smart Cameras - Harnessing the Generalization Capability of XCS.
DOI: 10.5220/0006512101290140
In Proceedings of the 9th International Joint Conference on Computational Intelligence (IJCCI 2017), pages 129-140
ISBN: 978-989-758-274-5
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

touch upon insights regarding the impacts of differ-
ent learning parameter configurations in scenarios of
varying complexity. Additionally, the resilience of the
techniques employed to equip smart cameras with the
intended self-learning capability is reflected in our ex-
periments by considering camera failures and look at
the time needed for the remaining camera to recover.
The remainder of this work is structured as follows:
In Section 2, we give an overview of related work in
the areas: (1) Coverage optimization in smart camera
networks, (2) applications of reinforcement learning
algorithms to smart cameras, and (3) the utilization
of Learning Classifier Systems (LCS) (Holland et al.,
2000) in real world contexts. Subsequently, in Sec-
tion 3, we explain the general concept and learning
interaction of XCS, the most prominent representative
of LCS today. The formulation of our application sce-
nario as Markov Decision Process (MDP) and neces-
sary adaptions of the conventional XCS algorithm are
the subject of Section 4. We demonstrate the benefit
of using XCS based on the results of conducted exper-
iments in Section 5. Eventually, Section 6 closes this
work with a brief summary and an outlook to planned
future work.
2 RELATED WORK
There are several works on the coverage optimiza-
tion of cameras (Sec. 2.1) and Reinforcement Learn-
ing (RL) in smart camera networks (Sec. 2.2). The
attempts include alignments through the PTZ capabil-
ities and the placement of the cameras. There are also
some works using RL techniques in the smart camera
domain. Furthermore, there are several real-world ap-
plications on which XCS has been applied (Sec. 2.3).
2.1 Coverage Optimization in SCN
Recently, (Liu et al., 2016) reviewed approaches for
the optimization of placement and alignment of cam-
eras. The majority of approaches focuses on settings
where a priori information about the environment is
available, e.g. the importance of particular spots.
Here, we follow a reinforcement learning approach,
i.e. the reconfigurations are based only on feedbacks
that we retrieve as a consequence of the realized ac-
tions (for a more detailed description of the reinforce-
ment learning approach, see Sec. 4.1).
Murray et al. (2007) focus on an urban model with po-
sitions that allow to install cameras. Then an off-line
optimization is used to determine the minimum num-
ber of cameras and the according alignment is calcu-
lated for the best coverage. This global optimization
is computationally highly intensive and therefore not
applicable for the on-line determination of the optimal
alignment that is in the focus of this work.
Erdem and Sclaroff (2006) propose a possibility to
optimize the placement and alignment of cameras ac-
cording to a given floor plan and task-specific con-
straints. The method proposed is an off-line optimiza-
tion algorithm and therefore can only be applied in ad-
vance to the camera installation. This paper focuses
on the optimization of the camera alignments during
runtime without previous knowledge of the environ-
ment.
Piciarelli et al. (2011) present an algorithm that uti-
lizes Expectation Maximization to optimize the align-
ment of coverage in a three dimensional environment,
but they focused on static and known environments.
2.2 Reinforcement Learning in SCN
Khan and Rinner (2012a) used Cooperative Q-
Learning to schedule tasks in a Wireless Sensor Net-
work and utilize it for an object tracking algorithm. In
following work (Khan and Rinner, 2012b), the same
authors employed artificial neural networks to tackle
the dynamic power management of a traffic monitor-
ing system involving smart cameras among other sen-
sors.
Lewis et al. (2013) used bandit solvers as part of an al-
gorithm for the allocation of tracking objects to cam-
eras.
Even though RL techniques have been successfully
applied in the domain of smart camera networks, to
the best of our knowledge none of these contributions
focuses on the problem of camera alignment, except
for Rudolph et al. (2014). In this paper, we use one
particular approach presented in their work, the Q-
learning (Watkins and Dayan, 1992) algorithm, for
comparison purposes.
2.3 Learning Classifier Systems in Real
World Scenarios
Learning Classifier Systems (LCS) have gained
plenty of research attention since their invention by
John Holland (Holland, 1976). Initially designed to
solve binary encoded reinforcement learning tasks,
today many applications to real-world problems can
be found in the literature. For instance, Goldberg ap-
plied LCS to simulated gas pipeline control (Gold-
berg, 1987). An application to robot arm control was
reported by Stalph and Butz (2012).
Variants of LCS have been applied to system-on-chip
architectures in (Bernauer et al., 2011). Bull et al.
(2004) proposed the application of an LCS to traffic

management. In Prothmann et al. (2008), a substan-
tially modified LCS that changes and constrains the
generalizing nature of the conventional system is pre-
sented and applied to adapt traffic lights at urban in-
tersections.
What such real-world scenarios typically have in
common is the complexity of the underlying prob-
lem space. Not all possible states are known a priori
what necessitates learning during the system’s run-
time. Large problem spaces with complex reward
functions are the result. In consequence, the system
has to cope with unforeseen or not anticipated situa-
tions at runtime. In order to cope with this challenging
aspect, recently, a further extension was carried out to
XCS in Stein et al. (2017b). The incorporation of a
so-called interpolation component supports the sys-
tem by increasing the learning speed and reducing the
overall system error. This interpolation-based XCS
variant was also applied to the aforementioned traffic
light management scenario in Stein et al. (2016).
Another application domain XCS was recently ap-
plied to, is the task of ensemble time series forecast-
ing. When signals are to be interpreted in techni-
cal systems, individual forecast methods have differ-
ent strengths and weaknesses for different character-
istics of time series. In Sommer et al. (2016a,b), an
XCS derivative for function approximation (XCSF)
was applied in order to learn the weights for a linear
combination of the outputs (forecast values) of a het-
erogeneous ensemble of forecasting techniques.
3 EXTENDED CLASSIFIER
SYSTEM
The Extended Classifier System (XCS) is a flexible,
evolutionary rule-based online machine learning sys-
tem. It was introduced in Wilson (1995) and can be
seen as one of the biggest milestones in LCS research.
XCS evolves its knowledge base as a population [P]
of condition-action rules, also called classifiers. This
set [P] is iteratively filled with a maximum number N
of classifiers of the following structure:
cl := (C, a, p, ε,F,exp,num,ts,as)
The first attribute C determines a certain subspace
of the defined n-dimensional state (or input) space
S that this classifier covers and is called the condi-
tion. By this means, XCS partitions the state space
S into smaller subspaces. In contrast to tabular Q-
Learning (Watkins and Dayan, 1992) where for each
state-action pair a single Q-value is approximated
(more precisely |S × A| Q-values), XCS can general-
ize over a finite or even infinite set of situations/states.
A classifier cl is ‘activated’ and put to a so-called
match set [M] ⊆ [P] whenever a situation σ(t)
:
=~x ∈ S
arrives that is encompassed by the condition C of cl
(in the following we use the dot-notation to refer to
a specific attribute of a certain classifier cl). cl.a ∈ A
represents one possible action of the action space A
that a specific classifier cl advocates.
Each classifier also maintains an incrementally calcu-
lated estimate of the average reward it has received
so far for advocating action a in one of the situations
σ ∈ cl.C which is usually called predicted payoff cl.p.
The mean absolute error of cl.p and the actually re-
ceived reward r after realizing action cl.a is stored
in the attribute cl.ε. The accuracy of predicting the
correct payoff relative to the environmental niche is
calculated as a sort of inverse of cl.ε and is called the
classifier’s fitness cl.F.
An experience statistic, cl.exp, gives indication of
how often this classifier was selected for action exe-
cution and subsequently updated by the reinforcement
mechanisms of XCS.
The numerosity cl.num of a classifier determines the
number of classifiers that this classifier could sub-
sume so far. Subsumption happens when a classifier
cl
1
is found to be more or at least equally general as
another classifier cl
2
which is to be subsumed. Addi-
tionally, cl
1
has to be more accurate than the prede-
fined error tolerance ε
0
and must advocate the iden-
tical action as cl
2
. A classifier with a cl.num > 1 is
called a macroclassifier, whereas a newly generated
classifier with cl.num == 1 is termed a microclassi-
fier. The main advantage of introducing subsumption
to XCS is the reduced computational effort during the
matching procedure, as well as the more compact rep-
resentation of the entire population [P].
The so-called timestamp attribute cl.ts stores the last
time when the involved Genetic Algorithm (GA) was
invoked on a set of selected classifiers where this clas-
sifier also belonged to. It is used to control the appli-
cation frequency of the GA.
XCS attempts to create a maximally accurate, max-
imally general, complete and compact mapping S ×
A → R, where R determines the set of possible reward
values. To create a complete mapping, it is neces-
sary to guarantee that each environmental niche (sub-
space of the entire state space S) is covered and gets
assigned an equal amount of resources in terms of
microclassifiers. The action-set size attribute cl.as
is used to determine a deletion candidate classifier
when the maximum number of microclassifier N is
exceeded and thus the following condition holds:
∑
cl∈[P]
cl.num ≥ N. In consequence, each environ-
mental niche should have been assigned an equal
number of classifiers.

XCS is flexible since it can be applied to a variety
of machine learning problems, e.g. Reinforcement
Learning problems (Wilson, 1995; Butz et al., 2005)
or rather Supervised Learning tasks, such as pure clas-
sification (Wilson, 2001) or also regression (Stalph
and Butz, 2012). There have also been investigations
on using XCS as an unsupervised learning mecha-
nism (Tamee et al., 2007).
XCS is called an evolutionary learning system since
it relies on a steady-state niche GA to find a glob-
ally optimal state space coverage. The system thereby
pursues two main goals: (1) evolve classifies that are
maximally general, and (2) retain maximal predic-
tion accuracy. This relationship in combination with
population-wide deletion became known as Wilson’s
generalization hypothesis (Wilson, 1995) and was ex-
tended by Kovacs to the optimality hypothesis (Ko-
vacs, 1998).
In essence, XCS learns in an online fashion by par-
titioning the state space S into smaller problems and
by estimating reward predictions locally by means of
(stochastic) gradient-descent techniques (Lanzi et al.,
2007). Additional to the local approximation, the in-
corporated GA is responsible for optimizing the state
space coverage globally. From an architectural point
of view, XCS can be decomposed into three main
components: (1) The performance component that
accomplishes the tasks of finding matching classi-
fiers and form [M], building the prediction array PA
that is further used to determine the action to be exe-
cuted a
exec
, and finally realizes the chosen action. (2)
The reinforcement component takes care of updating
all classifiers advocating the same action as the one
(a
exec
) to be executed (these are grouped in a so-called
action set [A] ⊆ [M]) on the basis of the received re-
ward r ∈ R. (3) The discovery component comprises
the covering mechanism that is responsible for gener-
ating classifiers on demand, as well as the steady-state
niche GA for refining the conditions of already exist-
ing classifiers to reach an optimal state space cover-
age.
4 APPROACH
This section describes our assumptions and defines
the problem space where the two algorithms under
consideration - XCS and Q-learning - are applied to.
Afterwards, we describe how XCS was adapted to fit
the requirements of the outlined setting.
4.1 The Learning Task
We describe our Reinforcement Learning setting as
Markov decision process (MDP), see Sutton and
Barto (1998), and define the necessary components,
i.e. the state space S, the action space A, the reward
function r : S × A → R, as well as the state-transition
function δ: S × A → S.
4.1.1 State Space
The state of each smart camera controller is defined
by the current values of its pan, tilt and zoom at-
tributes. Thus, the state can be described as a 3-
dimensional vector
~
s = (c
p
,c
t
,c
z
)
T
. We restricted the
set of possible values for c
p
,c
t
,c
z
according to reason-
able ranges and technical specifications. Furthermore,
we discretized the ranges as follows:
c
p
∈ {30, 60,.. .,360}, c
t
∈ {120, 150,180} and c
z
∈
{12,18}.
According to the above definitions, we get an state
space S with a magnitude of 12 · 3 · 2 = 72.
4.1.2 Action Space
For each of the three control variables that consti-
tute the state
~
s, a possible action determines whether
each of these values is increased (↑), decreased (↓)
or remains unchanged (=). This leads to an action
space A of a magnitude of 3 · 3 · 3 = 27. We prede-
fined the increase as well as the decrease amount for
each of the three control variables. An action vec-
tor ~a can thus be represented by numeric values, e.g.
~a = (+20,−30,0)
T
. This allows a simple vector ad-
dition to yield the new system state
~
s
0
(cf. Sec. 4.1.4).
Combined with the state space, the overall problem
space consists of |S| × |A| = 1944 state-action combi-
nations. Q-learning builds-up a table for each of these
possibilities. By using XCS, we strive to harness its
generalization capability to summarize similar state-
action pairs into a single classifier.
We want to note that the action space could be re-
stricted in a way so that there is no entry within the
Q-table for actions that would have no effect on the
succeeding state. For instance, when the zoom value
is at its maximum value and the smart camera con-
troller suggests to further increase the zoom, the al-
gorithm would not need to approximate these values
since they were already sorted out a priori by a human
expert. However, such a restriction was not applied in
this work.
A corresponding restriction of the action space has
also not been applied to XCS for two reasons: (1) We
intended to reduce the design-time effort and, thus,
the system’s engineer. (2) Such a restriction is not that

simple to implement, since XCS – roughly speaking
– creates a sort of Q-table in an online manner and
is designed to attempt the construction of a complete
solution map S×A → R. Nonetheless, future research
efforts are planned to address the introduction of ex-
actly such exploration constraints to XCS.
4.1.3 Reward Function
After an action has been realized and, subsequently,
the camera was reconfigured, a reward is calculated
by determining the sum of newly detected objects
within the vision area of all smart cameras. Hence,
the reward is highly stochastic, since it depends not
only on the configuration of a single camera, but also
on the current configuration of all other cameras in
the scenario under consideration. Naturally, it also
depends on the previous configuration of the camera
and the number of undetected objects that were ex-
actly in that vision field, i.e. objects that have already
been detected by any smart camera do not increase the
reward of the current step.
The stochastic nature of our reward function neces-
sitates an adaptive and incremental update procedure
to converge to nearly optimal (Q-)values describing
the utility of realizing action ~a in state
~
s. As we de-
scribe in the next section, we utilized the conventional
method to cope with stochastic reward functions – a
learning rate β which has been determined via various
parameter studies.
4.1.4 State Transition Function
The state transition function δ is given by a simple
vector addition of the current state vector
~
s ∈ S and
the selected action~a ∈ A. Thus, the next state is deter-
mined as
~
s
0
= (c
p
,c
t
,c
z
)
T
+(a
p
,a
t
,a
z
)
T
. In this work,
we do not consider uncertainty as a consequence of
noisy reconfigurations. This aspect constitutes a fur-
ther topic on our research agenda.
4.2 Adaptations to XCS
Since we are confronted with a discretized state space,
it seemed plausible to rely on a derivative of the con-
ventional XCS system that is capable of dealing with
numeric input values. In Wilson (2001), Wilson intro-
duced an extension to XCS for nominal inputs. The
condition is represented by so-called interval predi-
cates that determine a lower and an upper bound for
values accepted to satisfy the condition. In Wilson
(2000), XCS was further extended toward XCSR – an
XCS variant for real-valued input values.
For our problem scenario, we adopted Wilson’s tech-
niques by the following means: The condition is en-
coded by three interval predicates (l, u), one for each
control variable (c
p
,c
t
,c
z
). Since the state space is
discrete, we modified the covering and mutation op-
erators of XCS to reduce the search space complexity
to a reasonable level. Whenever XCS needs to cover a
situation not encountered so far, in a first step the con-
dition of the new classifier is set exactly to the current
state
~
s. Subsequently, the lower and upper bounds for
each of the i = 1 . . . 3 control variables are adapted as
follows:
l
i
= l
i
− r
0
·U (M
cov
) and u
i
= u
i
+ r
0
·U (M
cov
).
Thereby r
0
is a predefined range that determines a
discrete step along each state space dimension. M
cov
is a multiplier and U(M
cov
) delivers a uniformly dis-
tributed random integer value between 1 and M
cov
.
A similar procedure is applied to the mutation opera-
tor of the GA utilized by XCS to find a globally op-
timal coverage of the problem space. The only dif-
ference is that the step range for mutation m
0
and
the multiplier M
mut
differ from r
0
and M
cov
, respec-
tively. Furthermore, for mutation it is also permit-
ted that the lower bound is increased and the upper
bound is decreased, i.e. l
i
= l
i
± m
0
· U(M
mut
) and
u
i
= u
i
± m
0
·U (M
mut
). The sign is also selected at
random.
So far, our applied interval representation has one
considerable drawback: Yet, the step ranges r
0
and
m
0
are globally defined for any dimension of the state
space S. This may lead to an over-sized classifier
condition that does not exactly meet the possible dis-
crete values of the control variables as defined in Sec-
tion 4.1.1. The elimination of this drawback is left for
future work.
5 EVALUATION
In this section, we elaborate on the results of our em-
pirical investigations that were carried out in the con-
text of our described smart camera application. We
chose this application domain for two reasons: (1)
We can compare to previous work in this applica-
tion context that adopts reinforcement learning tech-
niques (Rudolph et al., 2014). (2) SCNs provide a re-
alistic (real world) problem which is a field of active
research (Piciarelli et al., 2016).
We conduct the experiments in a 3D simulation with
PTZ-capable cameras. The objective of the cameras
is to detect as many new objects as possible, i.e. al-
ready detected objects are not of interest. We explic-
itly note that the system goal is not congruent to the
coverage maximization, since depending on the setup
it is not necessary to observe the whole space but only
the regions that are populated with objects. Such an
objective is suitable, e.g. for a people counter in a
shopping mall, or for security purposes at the airport
(detecting wanted criminals).
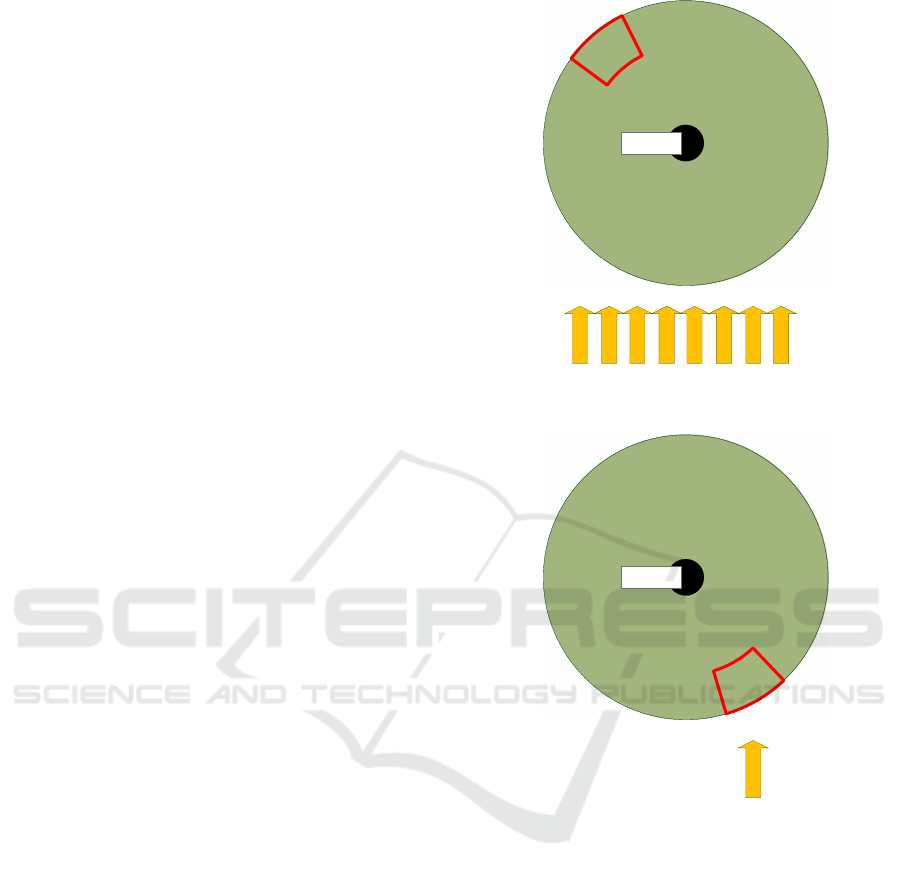
5.1 Experimental Setup
We compare the performance of XCS and Q-learning
in three different scenarios which are depicted in Fig-
ures 1, 2, and 3. The schematics show a top view.
Each scenario consists of one or multiple cameras
which are represented by a black dot. Around the
cameras, the colored sphere indicates the potential
observable space, i.e. the area that can be observed
when an appropriate PTZ-configuration is assumed.
The small subregion – depicted by a red box – rep-
resents an exemplary field of view. For clarification,
the entire colored sphere cannot be observed at once,
but only partially as indicated by the red boxed area.
Furthermore, the yellow arrows represent entry points
and the movement direction of the objects to be de-
tected. The quantity of entering objects is determined
by a probabilistic process that can be described as fol-
lows: Within a maximal interval of t
max
ticks an object
enters the scene every U(1,t
max
) ticks, where again
U(min, max) delivers a uniformly distributed random
integer between min and max.
Please note that the figures only provide a schematic
view on the different scenarios, but the actual ex-
periments have been conducted in a simulated 3-
dimensional environment.
Scenario 1. In this setting, one single camera in the
middle of the space is asked to observe as many ob-
jects as possible. The objects enter the scene from the
south. An adequate strategy for the camera would be
to alternate between several pan configurations, since
with a static configuration it is not possible to reach a
high reward.
Scenario 2. In the second scenario, the number of
objects is significantly decreased to one single stream.
An exemplary strategy that allows to detect all objects
would be to employ a static configuration that covers
the stream.
Scenario 3. The third scenario is inspired by an air-
port where two man conveyors or escalators are sit-
uated beside each other but with different movement
directions. Thus, a representative adequate strategy
would be that each camera focuses on one stream of
objects at a time using a static configuration as for sce-
nario 2. A further challenge is introduced by a camera
failure at a certain point in time. Accordingly, the re-
maining camera suddenly has to observe both streams
Camera
Figure 1: Schematic representation of scenario 1. One cam-
era observes multiple streams of objects.
Camera
Figure 2: Schematic representation of scenario 2. One cam-
era observes a single stream of objects.
and is thus forced to reconfigure to an alternating con-
figuration.
5.2 Parameter Study
For our parameter studies, we repeated the experi-
ments for 10 independent runs. For Q-learning, we
conducted a comprehensive parameter study com-
prising parameters learning rate β (For the sake
of consistency, we denote the learning rate with β
as it is typically the case for XCS. In the stan-
dard literature for Q-learning, the learning rate is
usually denoted by α.) and the discount factor
γ for scenario 1. We tested the ranges of β ∈
{0.1,0.2, . . . , 1.0}, γ ∈ {0.1,0.2,. . . ,0.9}. Regard-
ing the exploration/exploitation trade-off, we utilized

Camera 1
Camera 2
Figure 3: Schematic representation of scenarios 3. Two
cameras observe two single streams of objects.
the ε-greedy action-selection strategy, where ε deter-
mines the probability of choosing a random action in-
stead of the action with the maximum Q-value. Fur-
ther results, not included in this work, showed that an
exploration rate ε = 0.05 is appropriate for this learn-
ing task, therefore we limited the presented results to
this value. The Q-values have been initialized with
0.005. Each configuration was executed for 30.000
steps. Each point on the plots shows the average over
the entire 30.000 steps. To also capture the learning
speed, we furthermore analyzed the learning progress
to support our decisions (for the sake of brevity, these
plots are not included in this paper.).
Figure 4(a) depicts the results as a 3-dimensional
scatter plot. As Figure 4(a) shows, for scenario 1, the
best results have been achieved with a configuration
of β = 0.7, γ = 0.9.
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
15.015.516.016.517.017.518.018.519.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Learning rate β
Discount factor γ
Reward
(a) Scenario 1: Full parameter study of the learning rate β
and the discount factor γ
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
0.195
0.196
0.197
0.198
0.199
Learning rate β
Reward
(b) Scenario 2: Parameter study of the learning rate β
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
0.200
0.225
0.250
0.275
0.300
0.325
0.350
Learning rate β
Reward
(c) Scenario 3: Parameter study of the learning rate β
Figure 4: Results of the conducted parameter studies.
Points in the plot correspond to the average reward values
of 30.000 learning steps.
For the second and third scenario, we restricted our
study to the learning rate β, since a comprehensive pa-
rameter study for each scenario is not viable due to the
enormous computational effort. Thus, we fixed the
value for γ to 0.9, since we yielded this value in
our first parameter study for scenario 1. Furthermore,
higher values for γ in general seemed to be legit, since
we are confronted with a multi-step problem. The re-
sults of the partial parameter study for the scenarios 2
and 3 can be found in Figures 4(b) and 4(c), respec-
tively. As can be seen, for the second scenario β = 0.1
and for scenario 3 β = 0.6 yield the best configura-
tions. These observations could be supported by our
analysis of the learning progress of all investigated
configurations of β.
5.3 Comparison of XCS and Q-learning
In the following, we compare Q-learning with XCS.
For the comparison, we use the best configuration
found for Q-learning based on the results of the pa-
rameter study described above. Each comparison is
based on 30 independent runs with 30.000 steps for
each algorithm. A statistical analysis was carried out
considering a significance level of 5% (α = 0.05). We
performed a Shapiro-Wilk-test combined with a vi-
sual inspection of the Quantile-Quantile-plots to fig-
ure out whether the differences of the two samples
stem from a normally distributed population. To test
on variance homogeneity, an F-test was conducted.
Depending on the data properties of variance homo-
geneity and normal distribution, we decided for an ad-
equate test.
Since a comprehensive parameter study is not feasi-
ble due to the large number of dependent parameters,
we handcrafted our configuration based on domain
knowledge. For our experiments, XCS was config-
ured as follows: N = 800, α = 0.1, γ = 0.9, ε = 0.05,
δ = 0.1, ν = 5, θ
GA
= 12, ε
0
= 0.05, θ
mna
= |A| = 27,
θ
del
= 50, θ
sub
= 50, χ = 0.8, µ = 0.04, p
ini
= 0.005,
ε
ini
= 0.0, F
ini
= 0.01, r
0
= 0.1, m
0
= 0.05, M
mut
=
M
cov
= 3. For each scenario, the learning rate β has
been set to the values we yielded from the conducted
parameter studies described above. Thus, to provide
a comparability, we adopted the learning rate values
used for Q-learning for our XCS configuration. For
more details regarding the meaning of the standard
XCS parameters, we refer to (Butz and Wilson, 2002;
Wilson, 2000).
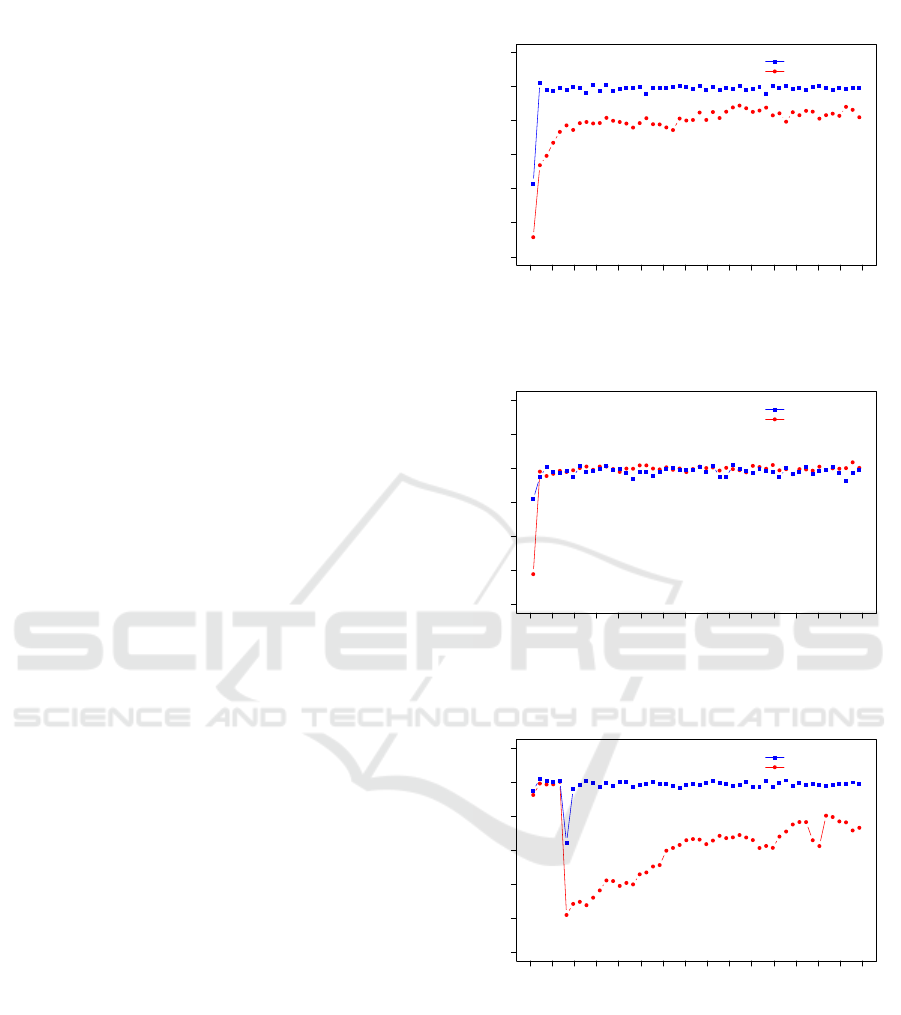
The results for scenario 1 can be found in Figure 5(a).
We see that XCS clearly outperforms Q-learning in
both learning speed and the quality of the learned
strategy. To compare the results of the two algo-
rithms in the overall performance, we relied on a
unpaired two sample t-test with significance level
α = 0.05. XCS reached an overall reward of around
19.88 ± 0.05, whereas Q-learning showed an inferior
average performance of around 18.94 ± 0.27. The p-
value of the conducted two sample test is less than
Steps in 1000
Reward
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30
15
16
17
18
19
20
21
XCS
Q−Learning
XCS vs. Q−Learning on Scenario 1
(a) Scenario 1, β = 0.7 for XCS and Q-learning
Steps in 1000
Reward
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30
0.100
0.125
0.150
0.175
0.200
0.225
0.250
XCS
Q−Learning
XCS vs. Q−Learning on Scenario 2
(b) Scenario 2, β = 0.1 for XCS and Q-learning
Steps in 1000
Reward
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30
0.15
0.20
0.25
0.30
0.35
0.40
0.45
XCS
Q−Learning
XCS vs. Q−Learning on Scenario 3
(c) Scenario 3, β = 0.6 for XCS and Q-learning
Figure 5: Graphical comparison of XCS and Q-learning on
three scenarios. Each point depicts the aggregated system
reward, averaged over 600 measurements.
2.2 × 10
−16
, which indicates that the average perfor-
mance of XCS is significantly higher.
In scenario 2, we face a quite different situation. In
Figure 5(b), we see that the learned strategy is of simi-
lar quality. However, during the initial learning phase,

XCS shows a faster learning behavior. We conducted
the same significance test as for scenario 1. The av-
erage performance of XCS is around 0.197 ± 0.003.
Q-learning reaches a performance value of about
0.198 ± 0.001. This difference is marginal, and with
a p-value of 0.2827 not significant.
The results for scenario 3 are shown in Figure 5(c).
There, during the initial learning phase, we see a sim-
ilar behavior of XCS and Q-learning. At step 3000 the
performance drops noticeably. This can be attributed
to the simulated failure of one camera. Afterwards,
we see a very fast recovery of the XCS controlled
camera, but, the Q-learning controlled camera on the
other hand does only show a rather slow upwards
trend. The overall performance was about 0.40 ±
0.002 for XCS and 0.31 ± 0.037 for Q-learning, re-
spectively. As indicated by the conducted two sample
t-test, the difference of the performances are statisti-
cally significant having a p-value of 5.891 × 10
−14
.
Concluding the results, we observe that overall XCS
clearly outperforms Q-learning. This becomes appar-
ent in scenarios 1 and 3. Especially, we figured out
that XCS shows its strengths in scenario 3, where the
self-learning cameras are asked to adapt to abruptly
changing circumstances, i.e. the failure of a camera.
Also in the second scenario, we observed a higher
learning speed during the initial learning phase in
comparison to Q-learning, but the eventually learned
strategies are on the same level.
The observed performance benefits are attributed to
the generalizing nature of XCS. For the defined MDP
(cf. Sec. 4.1), Q-learning has to individually approx-
imate |S × A| = 1944 state-action pairs within its Q-
table. XCS is able to yield improved results with only
≤ 800 (= N) macroclassifiers, each representing a
certain subset of the entire situation space S by means
of its interval encoding discussed in Section 4.2. This
leads to a simultaneous approximation of distinct but
adjacent state-action-pairs which in turn results in a
faster learning. The involved GA additionally exerts
evolutionary pressure toward an optimal coverage of
relevant subsets of the situation space S by favoring
the most accurate classifiers in the most frequently oc-
curring situations. A more proactive way of exploring
the situation space as proposed by Stein et al. (2017a)
could further improve the learning speed but is not
subject of this paper. Although the experimental re-
sults already show benefits when using a generalizing
XCS, we assume that the performance difference can
still be increased when XCS is configured with nearly
optimal parameters. However, this necessitates an ex-
haustive parameter study which demands for a high
computational effort.
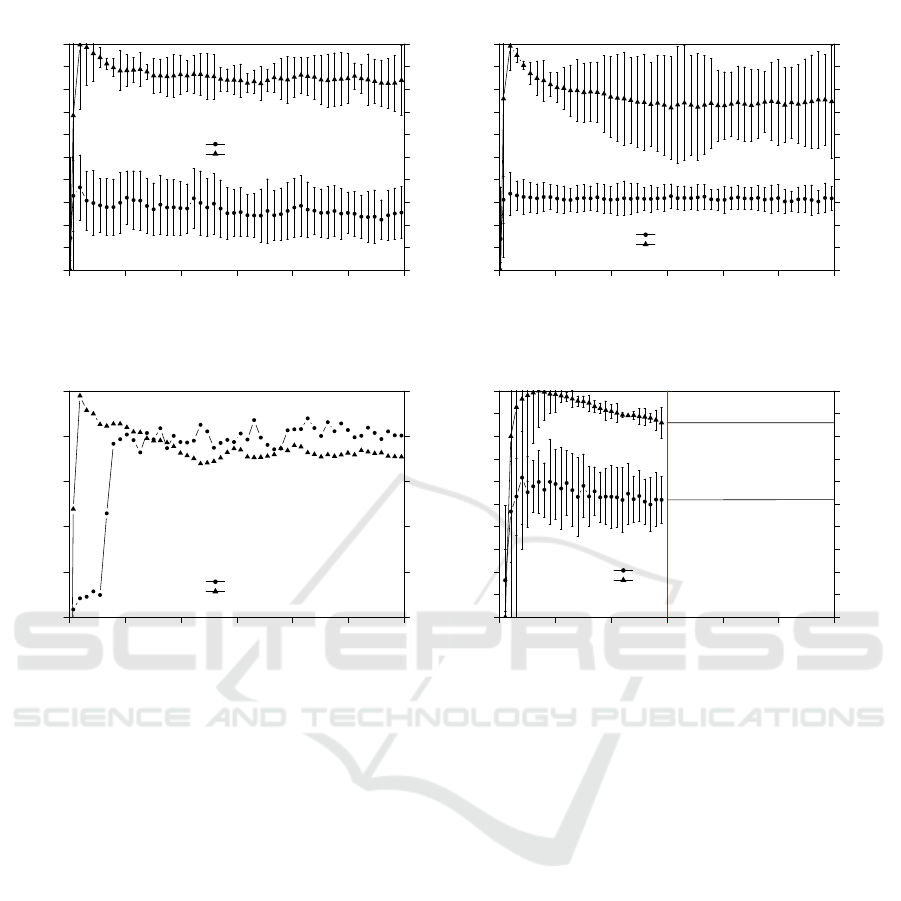
5.4 XCS Analysis
Figure 6 shows the learning progress of XCS. The
plots show two important metrics: (1) The mean abso-
lute system error, which averages the deviation from
the actual state-action value to the system prediction
over the last 100 steps. The system error relates to
the state-action value which comprises the reward for
realizing the chosen action of the previous step plus
the discounted maximum prediction array value of
the current time step. (2) The number of (macro-
)classifiers in the population [P], again averaged over
the last 100 steps.
As Figure 6(a) suggests, the system error in-
creases during the initial learning phase and subse-
quently decreases gradually. Considering the num-
ber of classifiers needed to approximate the problem
space, we can observe that after an initial peak near to
the allowed maximum number N, the level continu-
ously drops to less than 700 classifiers. Remembering
the superior performance of XCS in scenario 1, this is
a clear indicator that the utilization of XCS’ general-
ization mechanism yields beneficial effects over the
tabular representation of Q-learning.
For the second scenario, on average we can observe
a more significant decrease regarding the population
size |[P]|, however with a larger standard deviation
in comparison to scenario 1. This observation is at-
tributed to the fact that an optimal strategy for this
scenario appears to be much simpler than for the first
scenario. Considering the system error, there is no
clear trend observable, i.e. the system error stagnates
on a similar level. Possible reasons for this behavior
are: (1) the stochastic nature of the reward function,
(2) the applied non-decaying probability of selecting
a random action ε = 0.05, as well as, (3) the restricted
expressiveness of the utilized interval condition rep-
resentation, as discussed in Section 4.2. Under the
presumption of the aforementioned error sources, we
expect that XCS has already converged to the minimal
achievable error (expected value).
The third scenario introduces a further challenge to
the system. After 3000 steps, we simulated a cam-
era failure. Both cameras deploy one XCS instance
each. During the initial phase before the camera fail-
ure, both cameras show a similar behavior regarding
the system error and the number of macroclassifiers in
the population (see Fig. 6(d)). Looking at Figure 6(c),
a sharp increase of the system error is observable sub-
sequent to the failure of the second camera. Subse-
quently, the system error oscillates and remains on
that increased level. As we outlined in Section 4.1,
the reward function of the present scenario is stochas-
tic. After the camera failure, the remaining camera
0 5000 10000 15000 20000 25000 30000
0
20
40
60
80
100
Steps
System Error
0
10
20
30
40
50
60
70
80
90
100
Macro Classifier
0
80
160
240
320
400
480
560
640
720
800
XCS System Error (+/− 1SD)
XCS Avg. Population Size (+/− 1SD)
XCS Performance on Scenario 1
(a) Scenario 1
0 5000 10000 15000 20000 25000 30000
0.0
0.2
0.4
0.6
0.8
1.0
Steps
System Error
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Macro Classifier
0
80
160
240
320
400
480
560
640
720
800
XCS System Error (+/− 1SD)
XCS Avg. Population Size (+/− 1SD)
XCS Performance on Scenario 2
(b) Scenario 2
0 5000 10000 15000 20000 25000 30000
0.5
0.6
0.7
0.8
0.9
1.0
Steps
System Error
0.5
0.6
0.7
0.8
0.9
1.0
Macro Classifier
400
480
560
640
720
800
XCS System Error
XCS Avg. Population Size
XCS Performance on Scenario 3 for Camera 1
(c) Scenario 3 for camera 1
0 1000 2000 3000 4000 5000 6000
0.0
0.2
0.4
0.6
0.8
1.0
Steps
System Error
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Macro Classifier
0
80
160
240
320
400
480
560
640
720
800
XCS System Error (+/− 1SD)
XCS Avg. Population Size (+/− 1SD)
XCS Performance on Scenario 3 for Camera 2
(d) Scenario 3 for broken camera 2
Figure 6: Learning progress of the XCS learning algorithm in terms of the number of evolved macroclassifiers and the system
error for the three considered scenarios. For the sake of readability, we omitted the error bars depicting the standard deviation
in subfigure (c).
is asked to observe both streams of objects to be de-
tected. Thus, more reward can be gained but the de-
gree of non-determinism also increases. As for sce-
nario 2, we assume that the error level has already
converged and can hardly decrease further due to the
aforementioned three reasons. As for the first and the
second scenario, also in scenario 3 the average pop-
ulation size gradually reduces to a level of less than
700 classifiers.
6 CONCLUSION
Surveillance networks face certain challenges such
as finding the the optimal camera alignment or au-
tomated detection of suspicious events. In this paper,
we addressed the issue of automated camera align-
ment by means of reinforcement learning approaches
that aim to maximize the number of detected objects
in the observable range. We adapted the well-known
extended classifier system technique and applied it to
the camera control problem. Within our experimen-
tal evaluation, we compared the approach to an alter-
native technique, the Q-learning algorithm, that has
been previously proposed for the same problem set-
ting in literature. We demonstrated that the XCS-
based approach is able to significantly increase the
utility. This observation was attributed to the general-
ization approach of this particular learning system.
Future Work. As already indicated within the pa-
per, our current and future work focuses on two main
challenges resulting from the presented approach: (1)
an introduction of exploration constraints in XCS may
be beneficial to guide the exploration behavior and
improve the learning speed, and (2) the incorporation
of expert knowledge (i.e. a priori knowledge of hu-
mans) may also be used to steer the desired learning
behavior. In addition, we will apply the developed
technique to large-scale simulation with hetero-

geneous constellations of cameras, e.g. in terms of
varying capabilities.
ACKNOWLEDGEMENTS
This research is partially funded by the DFG within
the project CYPHOC (HA 5480/3-2).
REFERENCES
Bernauer, A., Zeppenfeld, J., Bringmann, O., Herkersdorf,
A., and Rosenstiel, W. (2011). Combining Soft-
ware and Hardware LCS for Lightweight On-chip
Learning. In Organic Computing, pages 253–265.
Birkh
¨
auser Verlag, Basel, CH.
Bull, L., Sha’Aban, J., Tomlinson, A., Addison, J., and Hey-
decker, B. (2004). Towards Distributed Adaptive Con-
trol for Road Traffic Junction Signals using Learning
Classifier Systems. In Bull, L., editor, Applications
of Learning Classifier Systems, volume 150 of Stud-
ies in Fuzziness and Soft Computing, pages 276–299.
Springer Berlin Heidelberg.
Butz, M., Goldberg, D., and Lanzi, P. (2005). Gradi-
ent descent methods in learning classifier systems:
improving XCS performance in multistep problems.
Evolutionary Computation, IEEE Transactions on,
9(5):452–473.
Butz, M. and Wilson, S. W. (2002). An Algorithmic De-
scription of XCS. Soft Comput., 6(3-4):144–153.
Erdem, U. M. and Sclaroff, S. (2006). Automated camera
layout to satisfy task-specific and floor plan-specific
coverage requirements. Computer Vision and Image
Understanding, 103(3):156–169.
Goldberg, D. E. (1987). Computer-aided pipeline opera-
tion using genetic algorithms and rule learning. part
ii: Rule learning control of a pipeline under normal
and abnormal conditions. Engineering with Comput-
ers, 3(1):47–58.
Hoffmann, M., H
¨
ahner, J., and M
¨
uller-Schloer, C. (2008).
Towards Self-organising Smart Camera Systems,
pages 220–231. Springer Berlin Heidelberg, Berlin,
Heidelberg.
Holland, J. H. (1976). Adaptation. In Rosen, R. and Snell,
F., editors, Progress in Theoretical Biology, volume 4,
pages 263–293. Academic Press, New York.
Holland, J. H., Booker, L. B., Colombetti, M., Dorigo, M.,
Goldberg, D. E., Forrest, S., Riolo, R. L., Smith, R. E.,
Lanzi, P. L., Stolzmann, W., and Wilson, S. W. (2000).
What Is a Learning Classifier System?, pages 3–32.
Springer Berlin Heidelberg, Berlin, Heidelberg.
Khan, M. I. and Rinner, B. (2012a). Resource coordination
in wireless sensor networks by cooperative reinforce-
ment learning. In PerCom Workshops, pages 895–900.
IEEE.
Khan, U. A. and Rinner, B. (2012b). A reinforcement learn-
ing framework for dynamic power management of a
portable, multi-camera traffic monitoring system. In
GreenCom, pages 557–564.
Kovacs, T. (1998). XCS Classifier System Reliably Evolves
Accurate, Complete, and Minimal Representations for
Boolean Functions. In Chawdhry, P., Roy, R., and
Pant, R., editors, Soft Computing in Engineering De-
sign and Manufacturing, pages 59–68. Springer Lon-
don.
Lanzi, P. L., Loiacono, D., Wilson, S. W., and Goldberg,
D. E. (2007). Generalization in the XCSF Classifier
System: Analysis, Improvement, and Extension. Evol.
Comput., 15(2):133–168.
Lewis, P. R., Esterle, L., Chandra, A., Rinner, B., and Yao,
X. (2013). Learning to be different: Heterogeneity
and efficiency in distributed smart camera networks.
In Proceedings of the 7th IEEE Conference on Self-
Adaptive and Self-Organizing Systems (SASO), pages
209–218. IEEE Press.
Liu, J., Sridharan, S., and Fookes, C. (2016). Recent
advances in camera planning for large area surveil-
lance: A comprehensive review. ACM Comput. Surv.,
49(1):6:1–6:37.
Murray, A. T., Kim, K., Davis, J. W., Machiraju, R., and
Parent, R. E. (2007). Coverage optimization to sup-
port security monitoring. Computers, Environment
and Urban Systems, 31(2):133–147.
Piciarelli, C., Esterle, L., Khan, A., Rinner, B., and Foresti,
G. L. (2016). Dynamic reconfiguration in camera net-
works: A short survey. IEEE Transactions on Circuits
and Systems for Video Technology, 26(5):965–977.
Piciarelli, C., Micheloni, C., and Foresti, G. L. (2011). Au-
tomatic reconfiguration of video sensor networks for
optimal 3d coverage. In 2011 Fifth ACM/IEEE Inter-
national Conference on Distributed Smart Cameras,
pages 1–6.
Prothmann, H., Rochner, F., Tomforde, S., Branke, J.,
M
¨
uller-Schloer, C., and Schmeck, H. (2008). Organic
Control of Traffic Lights, pages 219–233. Springer
Berlin Heidelberg, Berlin, Heidelberg.
Rinner, B., Winkler, T., Schriebl, W., Quaritsch, M., and
Wolf, W. (2008). The evolution from single to per-
vasive smart cameras. In Distributed Smart Cameras,
2008. ICDSC 2008. Second ACM/IEEE International
Conference on, pages 1–10.
Rudolph, S., Edenhofer, S., Tomforde, S., and H
¨
ahner,
J. (2014). Reinforcement learning for coverage op-
timization through PTZ camera alignment in highly
dynamic environments. In Proceedings of the In-
ternational Conference on Distributed Smart Cam-
eras, ICDSC ’14, Venezia Mestre, Italy, November 4-
7, 2014, pages 19:1–19:6.
Sommer, M., Stein, A., and H
¨
ahner, J. (2016a). Ensemble
Time Series Forecasting with XCSF. In 2016 IEEE
10th International Conference on Self-Adaptive and
Self-Organizing Systems (SASO), pages 150–151.
Sommer, M., Stein, A., and H
¨
ahner, J. (2016b). Local en-
semble weighting in the context of time series fore-
casting using XCSF. In 2016 IEEE Symposium Series
on Computational Intelligence (SSCI), pages 1–8.

Stalph, P. O. and Butz, M. V. (2012). Learning local lin-
ear jacobians for flexible and adaptive robot arm con-
trol. Genetic Programming and Evolvable Machines,
13(2):137–157.
Stein, A., Maier, R., and H
¨
ahner, J. (2017a). Toward Cu-
rious Learning Classifier Systems: Combining XCS
with Active Learning Concepts. In Proceedings of the
Genetic and Evolutionary Computation Conference
Companion, GECCO ’17, pages 1349–1356, New
York, NY, USA. ACM.
Stein, A., Rauh, D., Tomforde, S., and H
¨
ahner, J. (2017b).
Interpolation in the eXtended Classifier System: An
architectural perspective. Journal of Systems Archi-
tecture, 75:79 – 94.
Stein, A., Tomforde, S., Rauh, D., and H
¨
ahner, J. (2016).
Dealing with Unforeseen Situations in the Context of
Self-Adaptive Urban Traffic Control: How to Bridge
the Gap? In 2016 IEEE International Conference on
Autonomic Computing (ICAC), pages 167–172.
Sutton, R. and Barto, A. (1998). Reinforcement learning:
An introduction, volume 116. Cambridge University
Press.
Tamee, K., Bull, L., and Pinngern, O. (2007). Towards
Clustering with XCS. In Proceedings of the 9th An-
nual Conference on Genetic and Evolutionary Com-
putation, GECCO ’07, pages 1854–1860, New York,
NY, USA. ACM.
Valera, M. and Velastin, S. (2005). Intelligent distributed
surveillance systems: a review. Vision, Image and Sig-
nal Processing, IEE Proceedings -, 152(2):192–204.
Watkins, C. J. and Dayan, P. (1992). Q-learning. Machine
learning, 8(3):279–292.
Wilson, S. W. (1995). Classifier Fitness Based on Accuracy.
Evolutionary Computation, 3(2):149–175.
Wilson, S. W. (2000). Get Real! XCS with Continuous-
Valued Inputss. In Lanzi, P. L., Stolzmann, W., and
Wilson, S. W., editors, Learning Classifier Systems,
volume 1813 of Lecture Notes in Computer Science,
pages 209–219. Springer Berlin Heidelberg.
Wilson, S. W. (2001). Mining Oblique Data with XCS. In
Luca Lanzi, P., Stolzmann, W., and Wilson, S. W., edi-
tors, Advances in Learning Classifier Systems, volume
1996 of Lecture Notes in Computer Science, pages
158–174. Springer Berlin Heidelberg.
