
Concept and Design of an Intelligent Strategy to Mitigate Traffic
Congestion at Intersection
Zulkifli Lubis and Abdullah Zawawi Talib
School of Computer Sciences, Universiti Sains Malaysia, Malaysia
Keywords: Traffic congestion; Signalized and Unsignalized Intersections, Fixed-time Traffic Light Control System,
Discrete Event Simulation, DITC System
Abstract: Traffic congestion on public roads is one of the leading causes of lost productivity and decrease in the standard
of living in urban setting. The continuous increase in the congestion level, especially at rush hour, is a critical
problem and is becoming a major concern to transportation specialists and decision makers. Traffic congestion
causes excessive delays, reduced safety and increase in environmental pollution. An intersection is the area
where one street or road crosses another. Almost all modes of travel i.e. pedestrian, bicycle, motor vehicle,
and transit involve dealing with the intersection area for a given time period, which in turn makes it as a focus
of activity, conflicting movements area and a traffic control centre, and as a consequence reducing its capacity.
Traffic control at the intersection is an old and ever growing problem in cities all over the world. In many
cities, intersections represent bottlenecks in the traffic flow. Evaluating and managing intersections are
complex, difficult, costly, and time consuming. The existing methods for traffic management, surveillance
and control, are not adequately efficient in terms of performance, cost, maintenance, and support. In this
paper, we propose a framework of an intelligent approach for the Dynamic Intersection Traffic Control
(DITC) system. We also present some intersection designs that would benefit from the proposed DITC. The
proposed strategy reduces conflicts through geometric design and an intelligent traffic control systems. The
proposed DITC system has no waiting time and has a specific configuration.
1 INTRODUCTION
The goal of Intelligent Transport System (ITS) is
applying information technology, communications,
sensor technology and the internet to transportation
systems to improve travel safety, reliability,
passenger convenience, mobility, and mitigate traffic
congestion as well as reduce fuel consumption. The
Intelligent Traffic Control System is an important part
of the ITS (Shandiz, Khosravi, & Doace, 2009).
Traffic congestion appears when a large number
of vehicles attempt to use common transportation
infrastructure which has limited capacity. It leads to
queuing phenomena and corresponding delay (in the
best case), and a degraded use of the available space
and thus, reduce throughput (in the worst case).
Traffic congestion is a severe problem in many cities
around the world (Liu, 2008). Wen (2008), Yang and
Wen (2008), and Liu (2008) found that traffic
congestion results in excessive delays, reduced
safety, and increased environmental pollution. To a
commuter or traveller, it means lost time, missed
opportunities, and frustration while to an employer
congestion means lost worker productivity and trade
opportunities, delivery delays, and increase costs.
In this paper, we describe a framework for an
intelligent approach for the Dynamic Intersection
Traffic Control (DITC) system. We also present some
intersection designs that would benefit from the
proposed DITC.
2 RELATE WORK
We need some programming languages or software to
build a model/simulation model such as Java and
Matlab/Simulink, and software such as, Excel,
VISSIM, Arena, StellaTM, and Quadstone Paramics
and Azalient Commuter.
Groenewoud and Rinkel (2012) depicted the
classification of different kinds of simulation models
as illustrated in Figure 1.
518
Lubis, Z. and Talib, A.
Concept and Design of an Intelligent Strategy to Mitigate Traffic Congestion at Intersection.
DOI: 10.5220/0010045805180522
In Proceedings of the 3rd International Conference of Computer, Environment, Agriculture, Social Science, Health Science, Engineering and Technology (ICEST 2018), pages 518-522
ISBN: 978-989-758-496-1
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
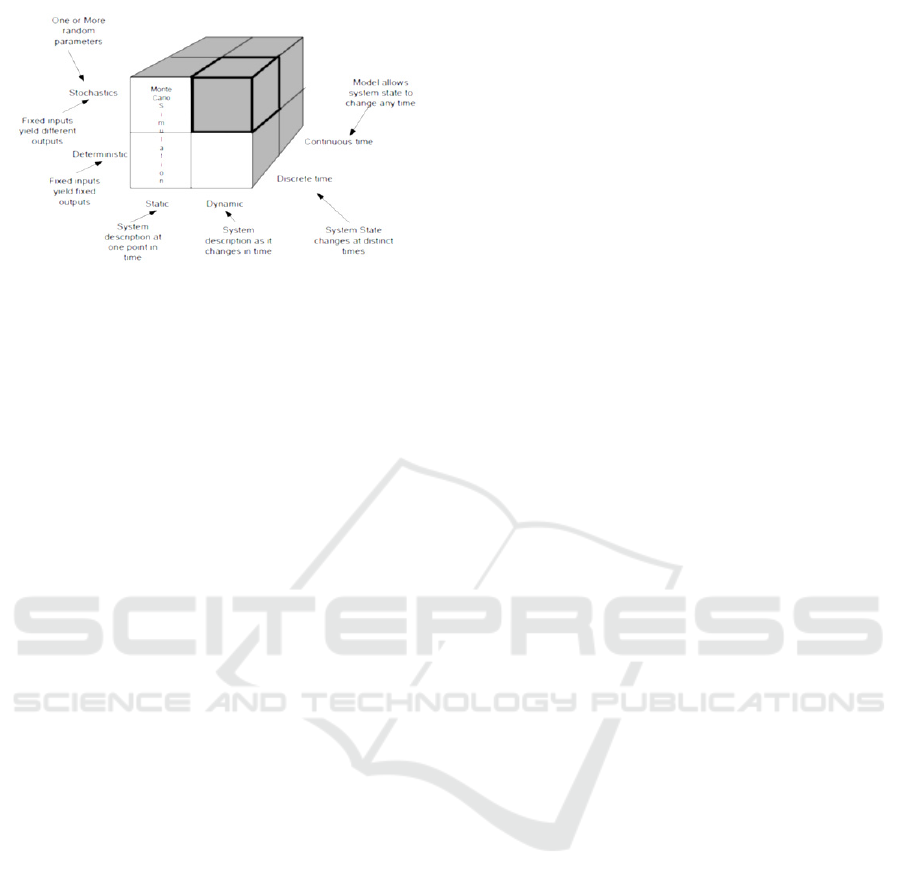
Figure 1: Classification of different types of simulation
models
There are three model of approaches in simulation
models, i.e. 1) continuous simulation; 2) static,
stochastic simulation (Monte-carlo simulation); and
3) discrete, dynamic, stochastic simulation also called
Discrete Event Simulation (Groenewoud & Rinkel,
2012). In a continuous model, state variables change
continuously as a function of time. In general
analytical method such as inductive mathematical
reasoning is used to define and solve a system.
According to Groenewoud and Rinkel (2012), the
Monte Carlo methods varies, but tends to follow a
particular pattern:
1. Define a domain of possible inputs.
2. Generate inputs randomly from a probability
distribution over the domain.
3. Perform a deterministic computation on the
inputs.
4. Aggregate the results.
Discrete event models represents only those time
steps at which change occurs, and consequently it is
called event base or event driven, where the system
jumps from one event to another, leaving out the
irrelevant behaviour for the model, in between the
events.
Ross (2005) defined the simulation approach
based on a framework which generates the stochastic
mechanisms of the model and then observes the
resultant flow of the model over time as the discrete
event simulation approach. Depending on the reasons
for the simulation, there will be certain quantities of
interest that someone wants to determine.
Furthermore, the key elements in a discrete event
simulation are variables and events. In general, there
are three types of variables that are often utilized, i.e.
the time variable t, refers to the amount of (simulated)
time that has elapsed; counter variables, which keep
a count of the number of times that certain events
have occurred by time t; and the system state variable,
that describes the “state of the system” at the time t.
Whenever an “event” occurs, the values of the above
variables are changed or updated, and any relevant
data of interest are collected as output.
There are a lot of ways to classify simulation
models. Kelton, Sadowski, and Swets (2010), and
also Groenewoud and Rinkel (2012) claimed that one
of the useful ways is along these three dimensions:
1. Static or Dynamic
2. Continuous or Discrete
3. Deterministic or Stochastic
In the static model, time does not play a natural
role but does in dynamics model. The Buffon needle
problem is an example of static model. Most
operational models are dynamic. In a continuous
model, the state of the system can change
continuously over time while in a discrete model,
change can occur only at certain times. An example
of continuous model would be the level of reservoir
as water flows in and is let out, and as precipitation
and evaporation occur. A manufacturing system with
parts arriving and leaving at specific times, machines
going down and coming back up at specific times is
an example of a discrete model. Models that have no
random input are deterministic, a strict appointment
with a booked operation with fixed service time is an
example. On the other hand, stochastic models
operate with at least some inputs being random. An
example is a bank with randomly arriving customers
requiring varying service times.
From traffic simulation models point of view,
there are two common approaches for traffic
modelling i.e., macroscopic and microscopic models.
Macroscopic traffic models are based on gas-kinetic
models and use equations relating to traffic density
and velocity while microscopic traffic models offer a
way of simulating various driver behaviours and it
consists of an infrastructure that is occupied by a set
of vehicles. Each vehicle interacts with its
environment according to its own rules, so different
kinds of behaviour emerge when groups of vehicles
interact (Wiering et al., 2004). Meanwhile
TransModeler (2013) and Salimifard and Ansari
(2013) divided traffic simulation models into three
kinds of models i.e., microscopic, macroscopic and
mesoscopic models. Microscopic models predict the
mood of single and individual vehicles both
continuous and discrete types such as individual
vehicle speed and locations, macroscopic models
make ready an extensive depiction of the traffic flow
simulation, end mesoscopic include the mixed aspects
of both microscopic and macroscopic models.
Concept and Design of an Intelligent Strategy to Mitigate Traffic Congestion at Intersection
519
3 THE PROPOSED DITC
ALGORITHM
By applying lane closure strategy, continuous flow
treatment in intersection zone provides an amazing
idea to create a reliable intersection traffic control. A
signalized intersection is treated as if it is an
unsignalized intersection for certain condition. Figure
2 shows how this combined technique performs its
function. The intersection normally functions as a
signalized intersection, but in certain situation when
the traffic control system is out of order (control
system failure or due to electrical power supply
failure) or traffic jam occurs at the intersection then it
will function as an unsignalized intersection with
special treatments. If the situation returns to normal
again, i.e. the traffic control systems is working as
usual or the jam or congestion has reduced, the
intersection reverts to a signalized intersection.
Figure 2: Main algorithm of proposed DITC Model
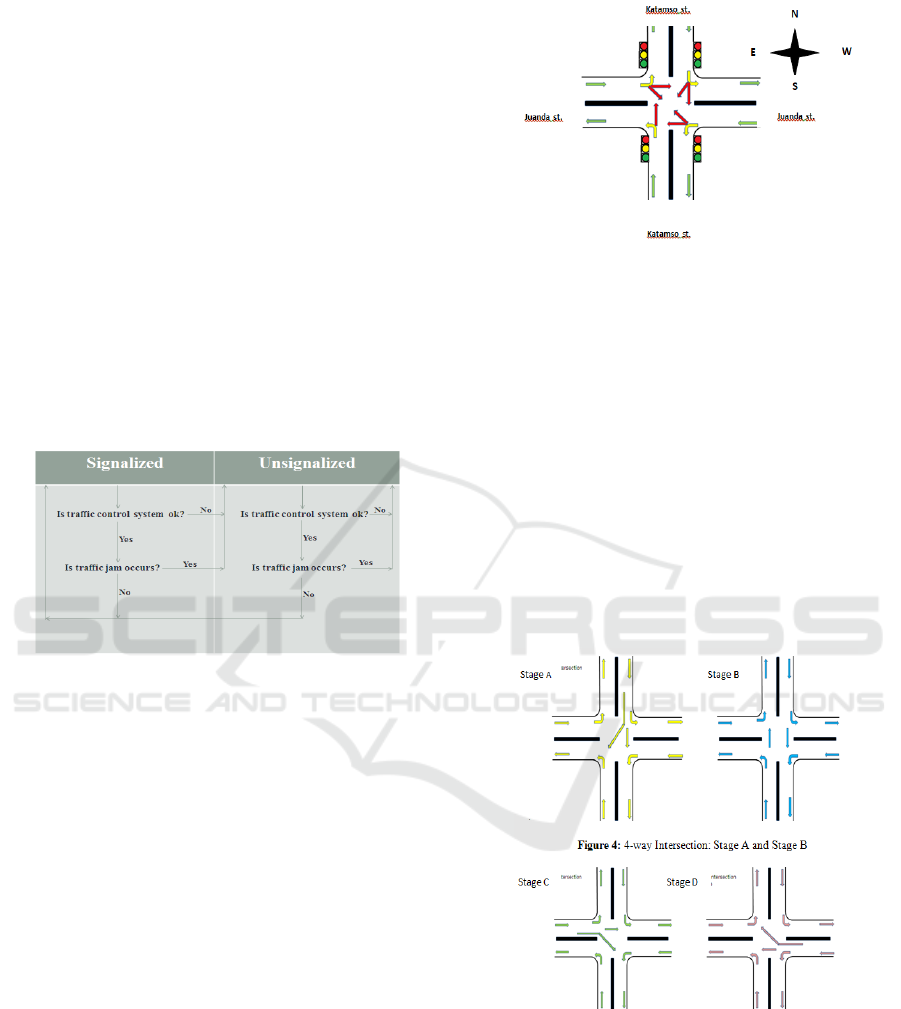
4 THE 4-WAY INTERSECTION
TIME-BASED SYSTEM
Medan is the largest city outside of Java, and the 3
rd
largest city in Indonesia, after Jakarta and Surabaya.
This study concentrate on one of the main 4-way
intersections and one of the main 3-way intersections
of the urban traffic system in Medan, the capital city
of the province of North Sumatera, Indonesia. The
observed intersections are an isolated (single) 4-way
signalized intersection located at Juanda street and
Katamso street as depicted in Figure 3.
Figure 3: Traffic Flow of 4-way Intersection
There are some patterns in traffic light control
system, and they depend on traffic condition,
government policies and others. At Juanda street and
Katamso street, the intersection has the patterns and
stages as given in Figure 4 and Figure 5. In the 4-way
intersection there are four stage sequences, i.e. stage
A, stage B, stage C and stage D, with special patterns,
and they are all controlled by three signals: red,
yellow, and green lights of the signals. Stage B has a
sligtly different pattern from stage A, stage C and
stage D where in the former vehicles may not turn to
the right permanently and in the latter, they may turn
to the right. These patterns are designed to reduce the
complexity of system.
Figure 5: 4-way Intersection Stage C and Stage D
Almost all traffic light control system in Medan
are fixed-time control where all signal timing
parameters are pre-computed and kept constant i.e.
fixed-time which is also called time-based system. In
this study, the simulation will be based on this system.
ICEST 2018 - 3rd International Conference of Computer, Environment, Agriculture, Social Science, Health Science, Engineering and
Technology
520
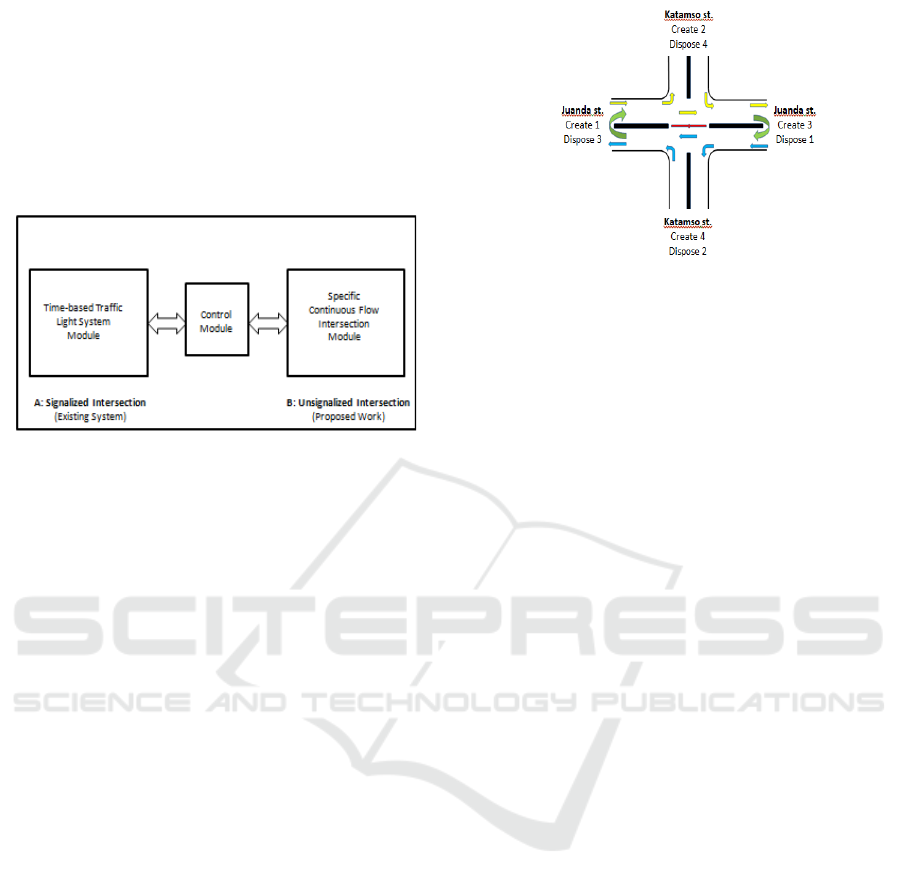
5 OVERVIEW OF THE
PROPOSED FRAMEWORK OF
THE DITC SYSTEM
The proposed DITC System framework consists of
three blocks i.e. block A (Signalised intersection),
block B (Unsignalised Intersection), and the control
module block as shown in Figure 6.
Figure 6: Proposed Framework of the DITC system
This DITC System divided into several modules
in its implementation. All modules in this study will
be implemented, tested and the result will be obtained
using Arena version 14.50.00002 (Student version).
6 THE PROPOSED DITC
MODELING FOR 4-WAY
INTERSECTION
In reducing or mitigating traffic jam or to overcome
power failure at intersection zone, this study will use
the optimal configuration of lane closure strategy by
completely closing four lanes in the middle of an
intersection zone of one road or street (with four
lanes, divided road or street), diverting all vehicles to
the left side of that direction and then detouring some
of them by means of U-turn rotation, following the
rest of the road and then at the intersection zone,
turning to the left to continue their movement in the
previous direction. This proposed strategy is shown
in Figure 7 and an illustration of Intersection’s lane
closure is given in Figure 8.
Figure 8: Illustration of intersection’s lane closure
7 CONCLUSION
The strategy used in this study is by reducing conflicts
through geometric design improvement, operating
speeds on approaches, choosing appropriate traffic
control, and improving management access by using
lane closure (in the middle of the intersection), U-
turn, and continuos flow intersection treatment. The
proposed DITC system has no waiting time, no phase
movement to follow and has specific configuration
when acting as unsignalized intersection. In this study
only two lanes are considered, it could be expanded
into multi-lane in a future work.
REFERENCES
Groenewoud, P., & Rinkel, A. (2012, July). The analysis
and simulation of a supply chain with Arena. (Thesis).
Retrieved from https://eprints.hsr.ch/140/1/
TechnicalReport.pdf
Kelton, W.D., Sadowski, R.P., & Swets, N.B. (2010).
Simulation with Arena. (5
th
Ed.). Singapore: McGraw-
Hill International.
Liu, T.I. (2008). Automatic Traffic Light Control System.
California State University, Sacramento, ME233 Final
Project Report.
Ross, S.M. (2005). Simulation, (3
rd
Ed.). New Delhi:
Elsevier Publisher.
Salimifard, K. & Ansari, M. (2013, April). Modeling and
Simulation of Urban Traffic Signals. International
Journal of Modeling and Optimization, 3(2), 172-175.
Shandiz, H.T., Khosravi, M., & Doace, M. (2009).
Intelligent Transport System Based on Genetic
Algorithm. World Applied Sciences Journal 6(7), 908-
913.
TransModeller (2013). Traffic Simulation Models.
Retrieved from http://www. caliper.com/transmodeler/
Wen, W. (2008), A dynamic and automatic traffic light
control expert system for solving the road congestion
Concept and Design of an Intelligent Strategy to Mitigate Traffic Congestion at Intersection
521

problem, in Expert Systems with Applications no 34, pp.
2370-2381, 2008.
Wiering, M., Veenen, J., Vreeken, J., & Koopman, A.
(2004, July). Intelligent Traffic Light Control. IICS,
Utrecht University, Netherlands, Tech. Rep. UU-CS-
2004-029.
Yang, C.L., & Wen, W. (2008). Solving the Traffic
Problem by Using A Simulation Model. International
Conference on Information Resource Proceedings
(CONF-IRM 2008).
ICEST 2018 - 3rd International Conference of Computer, Environment, Agriculture, Social Science, Health Science, Engineering and
Technology
522
