
Local and Global feature Descriptors Combination from RGB-Depth
Videos for Human Action Recognition
Rawya Al-Akam and Dietrich Paulus
Active Vision Group, Institute for Computational Visualistics, University of Koblenz-Landau,
Universitatsstr. 1, 56070 Koblenz, Germany
Keywords:
RGBD Videos, Global Features, Local Features, Action Recognition.
Abstract:
This paper attempts to present human action recognition through the combination of local and global feature
descriptors values, which are extracted from RGB and Depth videos. A video sequence is represented as a
collection of spatio and spatio-temporal features. However, the challenging problems exist in both local and
global descriptors for classifying human actions. We proposed a novel combination of the two descriptor
methods, 3D trajectory and motion boundary histogram for the local feature and global Gist feature descriptor
for the global feature (3DTrMBGG). To solve the problems of the structural information among the local des-
criptors, and clutter background and occlusion among the global descriptor, the combination of the local and
global features descriptor is used. In this paper, there are three novel combination steps of video descriptors.
First, combines motion and 3D trajectory shape descriptors. Second, extract the structural information using
global gist descriptor. Third, combines these two descriptor steps to get the 3DTrMBGG feature vector from
spatio-temporal domains. The results of the 3DTrMBGG features are used along with the K-mean clustering
and multi-class support vector machine classifier. Our new method on several video actions improves per-
formance on actions even with low movement rate and outperforms the competing state-of-the-art -temporal
feature-based human action recognition methods.
1 INTRODUCTION
Human action recognition from the video has drawn
attention from researchers in the field of computer vi-
sion, machine learning, and pattern recognition fields
to characterize the behavior of persons. Also, it has
been used in many applications fields like video sur-
veillance, robotics human-computer interaction and a
variety of systems that involve interactions between
persons and computers (Chen et al., 2013). Therefore,
the capability to design a machine that able to interact
intelligently with a human-inhabited environment is
playing important attention in recognizing activities
of people from the video frames (Adem Karahoca,
2008). In the last few years, the human activity re-
cognition researchers are essentially focused on re-
cognizing human action from videos frames captured
by traditionally visible light cameras (Yang and Tian,
2016). But recently, the action recognition research
has entered a new phase technological advances and
the appearance of the low-cost depth sensor like Mi-
crosoft Kinect (Soares Beleboni, 2014). These depth
sensors have many advantages over RGB cameras,
like provide useful extra information and 3D struc-
tural information to the complex problem of action
recognition, as well as color image sequences in real
time, also the depth information is invariant to lig-
hting and color variations and can even work in to-
tal darkness that which makes it possible to find the
solution for conventional problems in human action
recognition (Kim et al., 2014) (Li et al., 2010). Of
course, the depth camera also has an intense limi-
tation which can be partially enhanced by fusion of
RGB and depth. But all these advantages make it in-
teresting to incarnate the RGBD cameras into a lot of
challenging tasks.
Existing approaches for recognizing human action
can be classified into two main categories: local fe-
ature approach and global approach. The essential
steps of local feature approach are as follows: First,
extracting local sub-regions or interest points from vi-
deo or image sequences; Second, constructing des-
criptors to describe the local property such as SIFT
(Bakheet and Al-Hamadi, 2016) (Azhar et al., 2015),
optical flow (Nourani-Vatani et al., 2012); third, trans-
forming these local feature vector descriptors to the
Al-Akam R. and Paulus D.
Local and Global Feature Descriptors Combination from RGB-Depth Videos for Human Action Recognition.
DOI: 10.5220/0006525002650272
In Proceedings of the 7th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2018), pages 265-272
ISBN: 978-989-758-276-9
Copyright
c
2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
265
form of words using a bag of words method and
an action is represented by words combination; last,
the final features are input to the classifier to per-
form action recognition. While global approaches ge-
nerally extract the whole human body information,
like MHI (motion history images) (Bobick and Da-
vis, 2001), silhouette-based feature (Dedeo
˘
glu et al.,
2006) and MHV (motion history volume) (Weinland
et al., 2006). The performance may have an influence
on partial occlusion and background clutter.
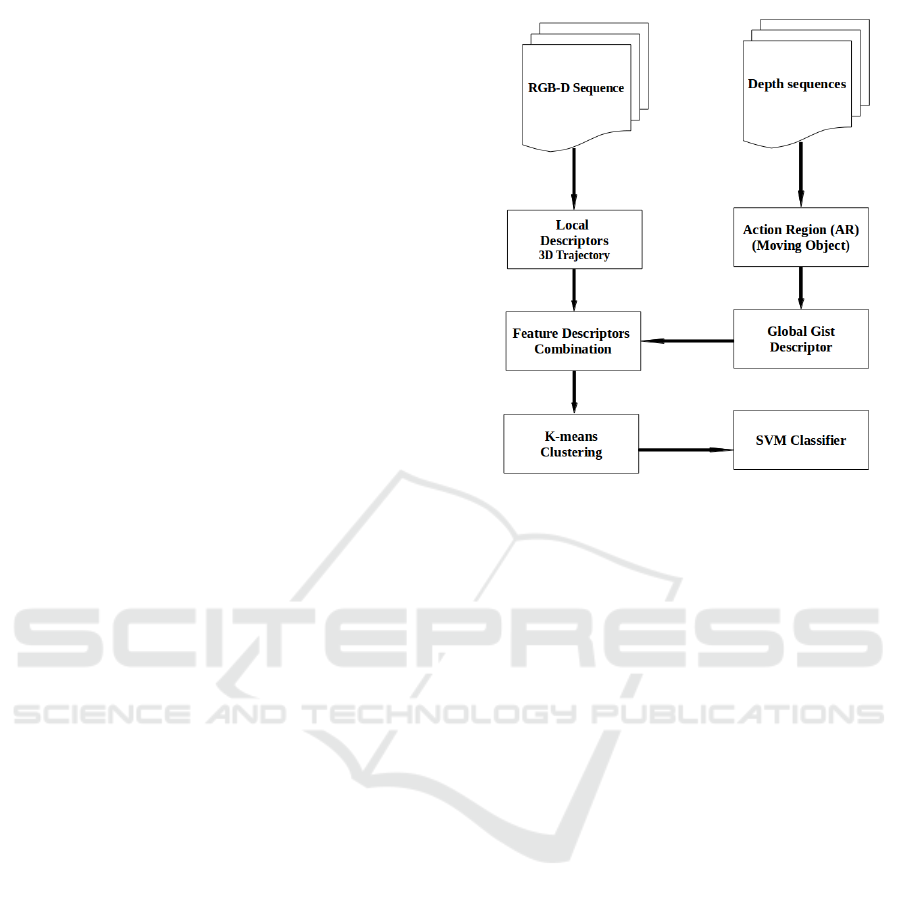
The contribution of this paper is to address the
problem of recognizing human behavior by using
a novel method based on combining 3D Trajectory
shape features from RGB-D video frames and both
Motion Boundary Histogram (MBH) and global Gist
features from depth video frames, which mean that
the combination of the local and global descriptors is
proposed. Local descriptors present a video as featu-
res extracted from a collection of patches, ideally in-
variant to clutter, occlusion, appearance change, and
possibly to the rotation and scale change as well.
While the main reason for using the global Gist des-
criptor is illustrated in three steps: First, Gist feature
captures global structural information by filtering an
image with different scales and orientations. In the
case of realistic scenarios, it can be extracted more re-
liably than silhouettes feature proposed in (Wang and
Suter, 2007). Second, the computational time of Gist
feature is much less than optical flow features used in
(Wang and Mori, 2010). Third, Gist feature can be
represented as the concatenation of several local grids
with implicit location information. In Figure 1 illus-
trate the general steps of action recognition progress.
2 RELATED WORK
Human action recognition has been a very active
research topic over the recent years, there are diffe-
rent approaches have been introduced to address the
action recognition problem. Depending on feature re-
presentations, action recognition systems can be ca-
tegorized into ones based on shape and appearance-
based representations (Niebles and Fei-Fei, 2007)(Ji
et al., 2013), which appearance and shape-based ap-
proaches build models to represent actions and use
these models in recognition tasks. Optical-flow based
representations, that depends on calculating the opti-
cal flow to encode the energy of the action and repre-
sent actions as histograms of optical flow (Dalal et al.,
2006)(Chaudhry et al., 2009). Dense-trajectory-based
methods (Wang and Schmid, 2013), in this method,
each dense trajectory is often represented as a vec-
tor of coordinates, this means that it is consequently
Figure 1: General structure of our proposed method.
missing the structural relationship between different
trajectories. The researchers in (Shi et al., 2015) sol-
ved this problem by using deep trajectory descriptor
to improve action recognition on RGB dataset. In
another hand, some research depends on global des-
criptors, which is used for computing the structural
information (shape, texture, and contour representa-
tion) from the images (Somasundaram et al., 2014).
As in (Wang et al., 2013b), the global features was
computed by applying a bank of 3D spatio-temporal
filters on the frequency spectrum of video frames to
extract the information about the motion and scene
structure. The global Gist descriptor (Wang et al.,
2014b) (Wang et al., 2013b) was used to extract the
global grid-based features from image sequences to
represent the human action recognition. The combi-
nation of local and global descriptor was improved
in (Lisin et al., 2005) (Wang et al., 2015a) by using
different combination strategy to improve the action
classification tasks from RGB video frames. To ad-
dress the problem of action recognition, some rese-
archer used depth information related to RGB videos
like a Kinect dataset to incorporate the RGBD came-
ras into more tasks. (Koperski et al., 2014) and (Xiao
et al., 2014) which extended the 2D trajectory method
to 3D trajectory by using RGB-D dataset. whereas we
use the 3D Trajectory combined with global gist des-
criptor from RGBD video dataset.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
266

3 PROPOSED APPROACH
In this section, we describe our proposed approach for
action recognition. This approach includes four steps.
First, improved 2D dense trajectory method on RGB
videos (Wang and Schmid, 2013) to 3D trajectory on
RGB-D videos by mapping the 2D positions of the
dense trajectories from RGB video frames to the cor-
responding positions in the depth video frames. That
can recover the 3D trajectory of the tracked interest
points, which captures important motion information
along the depth direction. To represent the 3D trajec-
tories, we apply motion boundary histogram (MBH)
to depth direction and propose 3D trajectory shape
descriptors. Second, Apply background subtraction
on depth frames, only the area where human located
is extracted from each frame of a video. Which called
Action-Region (AR). Third, A Gist features are com-
puted to each AR. The global long feature is compo-
sed of m × n Gist vectors located in non-overlapping
local grids, where m × n is the number of the grids in
an AR. finally, local and global features are then ex-
tracted and combined to encode video information. In
the training step, features extracted from the training
set are clustered using K-means (Xie et al., 2011) to
generate a bag of words. Histograms based on occur-
rences of bag words in the training set are used as fe-
atures to train classifiers. Finally, a multi-class SVM
classifier is used to achieve action recognition. The
following subsections explain each step in detail.
3.1 Preprocessing Input Data
The input videos which represented by color and
depth data are analyzed as a frame sequence to extract
the important features that presented in each video se-
quences. In order to reduce the computational com-
plexity of the system in our work, we are used a lower
resolution of 320 × 240. The depth maps data captu-
red by the Kinect camera are often noisy due to im-
perfections related to the Kinect infrared light reflecti-
ons. For reducing noise and to eliminate the unmat-
ched edges from the depth images, two different de-
noising methods are used, the depth inpainting appro-
aches (Xue et al., 2017) to paint the missing regions
of specific kinds (e.g. occlusions, missing caused by
sensor defects or holes caused by object-removal) and
a spatio-temporal bilateral filtering to smooth depth
images. The joint-bilateral filtering proposed in (Zhao
et al., 2012) is formulated as in formula (1):
ˆ
D
(P)
=
1
K
(p)
∑
q∈Ω
p
f (p, q)g(k
ˆ
D
m
(p) −
ˆ
D
m
(q) k)
h(k I
(p)
− I
(q)
k)
(1)
where f (p,q) denotes a domain term to measure the
closeness of the pixels p and q. The function g(.) re-
fers to the depth range term that computes the pixel
similarity of the modeled depth map. The function
h(.) perform an intensity term for measuring the in-
tensity similarity. Moreover, Ω
p
represents the spatio
neighborhood of position p.
3.2 Feature Description
For the feature extraction step, we used two types
of descriptor methods: local and global descriptors,
which are represented by the 3D trajectory, MBH, and
global Gist descriptor. The next subsection explains
these methods in detail:
3.2.1 Local Feature Extraction
In this step, the 3D trajectory features are extracted
from RGB-D video frames by extending the 2D tra-
jectory in (Wang and Schmid, 2013)
1
. However, the
dense trajectories achieve promising results on the 2D
image plane, but, the motion information along the
depth direction is missing in this work. To relieve
this problem, we estimate the depth motion, by as-
sume for each point P on the 2D RGB image plane,
let
−→
x = (x
t
,y
t
) be its position at frame t by mapping
−→
x = (x
t
,y
t
) to the depth frame I
z
t
, and the scene flow
estimation which represent the 3D motion field of a
scene (w
t
) as illustrated in Algorithm 1 (Xiao et al.,
2014).
However, the MBH descriptors (Wang et al.,
2013a) in the directions of (MBH
x
and MBH
y
) gave a
good performance in RGB. We extracted MBH from
the depth direction (MBH
z
). For the RGB-D data,
besides these two MBH descriptors direction above.
One major advantage of MBH
z
is robustness to ca-
mera motion along the depth direction. We follow
the model of MBH
x
and MBH
y
in (Wang and Schmid,
2013) to extract MBH
z
.
1
http://lear.inrialpes.fr/people/wang/improved
trajectories
Local and Global Feature Descriptors Combination from RGB-Depth Videos for Human Action Recognition
267

Algorithm 1: 3D trajectories and feature extraction.
input : 2D dense trajectories
Extend 2D dense trajectories to 3D trajectories
for each 2D trajectory Tr
i
2D
do
for each 2D trajectory point P
j
2D
do
• Map P
j
2D
to the depth frame I
z
t
• Estimate the scene flow w
t
of P
j
2D
end
Extend Tr
i
2D
to 3D trajectory Tr
i
3D
with
availability check
If Tr
i
3D
is available, extract activity features
along it
end
output: 3D trajectories and RGB-D activity features
3.2.2 Global Feature Extraction
In addition to the local descriptors, the global-based
descriptors encode more spatio and temporal infor-
mation within video sequences, which is representing
the actions based on holistic information about the
action and scene in each video frames. This descrip-
tor method often requires the localization of the hu-
man body through alignment, background subtraction
or tracking (Solmaz et al., 2013), and directly extract
and describe the whole properties of human silhouet-
tes or contours (Wang et al., 2015a).
In this work, The Gist descriptor is used in the
spatio-temporal domain to extract the structural fea-
ture from depth frames. GIST descriptor was propo-
sed by (Wang et al., 2015a) and has been widely used
in object classification and image retrieval (Ikizler-
cinbis and Sclaroff, 2010). The global feature is com-
puted as follow (Wang et al., 2015b):
• Given a video with n frames, the human region
in each frame is separated from the background,
which is called Action-Region (AR). i.e extraction
to the foreground from all frame sequences (mo-
ving object).
• Gist descriptor is computed using a cluster of Ga-
bor filters as shown below, which the AR Con-
volve with 32 Gabor filters at 4 scales, 8 orienta-
tions, producing 32 feature maps.
G(x,y) = exp(
−(x
2
1
+ y
2
1
)
2σ
2(l−1)
)cos(2π(F
x
x
1
+ F
y
y
1
)),
(2)
x
1
y
1
=
cos θ
l
sin θ
l
−sin θ
l
cos θ
l
x
y
, (3)
where (F
x
,F
y
) represent the frequency of the si-
nusoidal component. θ
l
and l are the values of the
orientations and scales respectively.
• Divide each feature map into 16 regions (by a 4 ×
4 grid), and then average the feature values within
each region.
• Concatenate the 16 averaged values of all 32 fea-
ture maps, resulting in a 16 ×32 = 512 GIST des-
criptor dimensions.
3.3 Action Recognition
In order to represent performance comparison for our
action recognition system, we use a Support Vector
Machines (SVM). It is one of the classification met-
hod, that is used hyper-planes in high dimensional
space to divide the training data with the largest mar-
gin of the points and it is powerful and excessively
used in the Bag-of-Words (BoW) state (Uijlings et al.,
2015). In this work, to generate the Bag-of-Words
(BoWs), each feature description of the video frame
is compared to each centroid of the cluster in the dicti-
onary using Euclidean distance measure e as formu-
lated in equation (4) (Kundu et al., 2014):
e =
m
∑
j=1
n
∑
i=1
kX
i
( j)
−C
j
k
2
(4)
where kX
i
( j)
−C
j
k
2
is the selected distance measure
between the feature vector point and the clustering
center C
j
. m is the clustering center length and n
is the feature vector size. To classify video actions,
we used multi-class SVM with radial basis function
(RBF) kernel, An RBF is mapping the data into an in-
finite dimensional Hilbert space. The RBF is a Gaus-
sian distribution, calculated as in formula (Mahesh
et al., 2015):
k
RBF
(~x,~z) = e
−(~x−~z)/2σ
2
(5)
where k
RBF
(.) is the kernel function, ~x and ~z are the
input vectors. The Bag of words vectors for all the
videos are computed in training stage and labels are
appended according to the class. This bag of words
vectors are fed into the multi-class SVM in order to
train the model that is further used in the testing stage
for human action recognition as shown in Figure 2. In
this figure, we show the steps of the dictionary gene-
ration after the feature vector extraction steps and this
is the important step of BoW method. To generate
the dictionary, the K-means clustering algorithm was
used. The size of the dictionary is important for the
recognition process, when the size of the dictionary
is set too small then the BoW model cannot express
all the keypoints and if it is set too high then it might
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
268

Figure 2: Action Classification Framework.
lead to over-fitting and increasing the complexity of
the system . The K-means clustering was applied on
all BoW from training videos, the K has represented
the dictionary size. The centroids of each cluster are
combined to make a dictionary. In our method, we got
the best result with a value of K = 100 as a dictionary
size (Al-akam and Paulus, 2017).
4 EXPERIMENTATION AND
EVALUATION
In this section, we illustrate the two types of data-
sets that used in our approach and the experimental
results.
4.1 Dataset
To assess the performance of our approach, the public
dataset like MSR DailyActivity 3D Dataset
2
and On-
line RGBD Action dataset (ORGBD)
3
are used. This
dataset is widely used in the evaluation of action re-
cognition algorithm.
4.1.1 MSR-DailyActivity3D Dataset
The MSR DailyActivity 3D Dataset is designed to co-
ver human’s daily activities in the living room and it
is captured by a Kinect device and it is represent a 3D
daily activity dataset (Wang et al., 2014a). This da-
taset contains 16 action and 10 subjects; each subject
performs each activity in two different poses: drin-
king, eating, read a book, call cell phone, writing on
a paper, using laptop, using vacuum cleaner, cheer
up, sitting, still, tossing paper, playing game, laying
down on sofa, walking, playing guitar, stand up and
sit down. See Figure 3 (Al-akam and Paulus, 2017).
2
http://www.uow.edu.au/
˜
wanqing/#Datasets
3
https://sites.google.com/site/skicyyu/orgbd
Figure 3: Sample frames of MSR-Daily Action 3D Dataset.
Figure 4: Sample frames of Online RGBD Action Dataset.
4.1.2 Online RGBD Action Dataset
The Online RGBD Action dataset (ORGBD) (Yu
et al., 2015) are captured by the Kinect device. Each
action is represented by 16 subjects and each action is
performed two times. In this dataset, the seven types
of actions are recorded in the living room: drinking,
eating, using a laptop, picking up a phone, reading
phone (sending SMS), reading a book and using a re-
mote. As shown in Figure 4 (Al-akam and Paulus,
2017). We compare our approach with the state-of-
the-art methods on the same environment test setting,
where half of the subjects are used as training data
and the rest of the subjects are used as test data.
4.2 Experiments and Results
To improve the performance of the proposed appro-
ach (3DTrMBGG), We test the two types of the data-
set as presented in sec 4.1.1 and sec 4.1.2, and try to
experiment the results in three different models:
• Local descriptors, which means that the feature
vectors are extracting using 3D Trajectory from
RGB-D combined with 3D motion boundary his-
togram (3DTrMB) from depth information. The
feature descriptor dimensions from 3DTrMB are
628 for each video action.
Local and Global Feature Descriptors Combination from RGB-Depth Videos for Human Action Recognition
269

• Global descriptor, in this step the feature vectors
are extracting using Gist descriptor from depth
information(3DGIST). The feature descriptor di-
mensions from 3DTrMB are 512 for each video
action.
• Local and Global descriptor combination. The fe-
ature vectors are extracting by the combination
between 3DTrMB and 3DGIST feature values in
one vector 3DTrMBGG for each video action on
RGB-D videos. The feature vector dimensions
from 3DTrMBGG are 1140 for each video action.
Table 1 shows the comparison results of the three
steps illustrated above. For each step, we perform
K-means clustering to the feature descriptors values,
which yields codebooks with size K. In our experi-
ments, we set K as 100. Finally, the multi-class SVM
classifier is applied to compute the accuracy values
from the proposed method.
From our test results, we notice that the com-
parison between this three steps results show that
the combination between local and global give
the accuracy as 95.62% and 95.62% using MSR-
DailyActivity3D and Online RGBD action dataset,
while the results from using local or global descrip-
tors separately is less than the combined results on
the same dataset.
In Table 2 and Table 3 compares our results with
the existing state of the art using the same dataset with
different action recognition methods.
5 CONCLUSIONS AND FUTURE
WORKS
This paper proposed a novel action representation by
combining 3D trajectory, motion boundary histogram
and global Gist feature (3DTrMBGG) using the bag
of word (BoW) model. And also, this work impro-
ved the benefit of combining a set of local features
vector with a single global feature vector in a suita-
ble manner. The advantage is that not an only main
global attribute of human action are kept but also the
impact of occlusion and noise is reduced. Evaluations
on two challenging realistic scenario’s action datasets,
3D MSR-Daily action, and Online-RGBD datasets,
prove that our proposed method has the capability of
recognizing diverse actions in a large variety of RGB-
D videos. From the Experiment results showed that
the proposed scheme can effectively recognize the si-
milar action with high movement rate as walking, cle-
aning, etc., and improves performance on actions with
low movement rate like: reading, using laptop, etc. It
gives a 95.62% on 3D MSR Daily action dataset and
97.62% on ORGBD dataset as a recognition rates.
As the future work, we will focus on salient ob-
ject detection method to detect salient objects in video
frames and only extract features for such objects and
will combine a new feature vector values like local
binary pattern (LBP). Also for the classification task,
we will use convolution neural networks (CNN), and
K-nearest neighbor (KNN).
ACKNOWLEDGEMENTS
This work was partially supported by Ministry of
Higher Education and Scientific Research (MHESR),
Iraq, and University of Koblenz Landau, Germany.
REFERENCES
Adem Karahoca, M. N. (2008). Human motion analysis and
action recognition. In 1st WSEAS International Con-
ference on Multivariate Analysis and its Application
in Science and Engineering, pages 156–161.
Al-akam, R. and Paulus, D. (2017). RGBD Human Action
Recognition using Multi-Features Combination and
K-Nearest Neighbors Classification. International
Journal of Advanced Computer Science and Applica-
tions (IJACSA), 8(10):383–389.
Azhar, R., Tuwohingide, D., Kamudi, D., Sarimuddin, and
Suciati, N. (2015). Batik Image Classification Using
SIFT Feature Extraction, Bag of Features and Support
Vector Machine. Procedia Computer Science, 72:24–
30.
Bakheet, S. and Al-Hamadi, A. (2016). A Discriminative
Framework for Action Recognition Using f-HOL Fe-
atures. Information, 7(4).
Bobick, A. F. and Davis, J. W. (2001). The Recognition of
Human Movement Using Temporal Templates. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 23(3):257–267.
Chaudhry, R., Ravichandran, A., Hager, G., and Vidal, R.
(2009). Histograms of oriented optical flow and Binet-
Cauchy kernels on nonlinear dynamical systems for
the recognition of human actions. In IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition Workshops, CVPR Workshops 2009, pa-
ges 1932–1939.
Chen, G., Zhang, F., Giuliani, M., Buckl, C., and Knoll,
A. (2013). Unsupervised Learning Spatio-temporal
Features for Human Activity Recognition from RGB-
D Video Data. In Social Robotics, pages 341–350,
Cham. Springer International Publishing.
Dalal, N., Triggs, B., and Schmid, C. (2006). Human de-
tection using oriented histograms of flow and appea-
rance. In Computer Vision – ECCV, pages 428–441,
Berlin, Heidelberg. Springer Berlin Heidelberg.
Dedeo
˘
glu, Y., T
¨
oreyin, B. U., G
¨
ud
¨
ukbay, U., and C¸ etin,
A. E. (2006). Silhouette-Based Method for Object
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
270
Table 1: Our Experiment Results on RGB-D dataset.
Dataset Methods Accuracy
3DTrMB 92.0%
MSR-DailyActivity3D 3DGist 93.33%
3DTrMBGG 95.62%
3DTrMB 81.52%
ORGBD 3DGist 83.81%
3DTrMBGG 97.62%
Table 2: Comparison of Recognition Accuracy with other Methods on MSR Daily Activity 3D Dataset.
Methods Accuracy
CHAR (Zhu et al., 2016) 54.7%
Discriminative Orderlet (Yu et al., 2015) 60.1%
Relative Trajectories 3D (Koperski et al., 2014) 72.0%
Moving Pose (Zanfir et al., 2013) 73.80%
CoDe4D+Adaptive MCOH (Zhang and Parker, 2016) 86.0 %
Unsupervised training (Luo et al., 2017) 86.9 %
3DTrMB 92.0%
3DGist 93.33%
3DTrMBGG 95.62%
Table 3: Comparison of recognition accuracy with other methods on Online RGBD (ORGBD) Dataset.
Methods Accuracy
HOSM (Ding et al., 2016) 49.5%
Orderlet+SVM (Yu et al., 2015) 68.7%
Orderlet+ boosting (Yu et al., 2015) 71.4%
Human-Object Interaction(Meng Meng et al., 2015) 75.8%
3DTrMB 81.52%
3DGist 83.81%
3DTrMBGG 97.62%
Classification and Human Action Recognition in Vi-
deo. In Computer Vision in Human-Computer In-
teraction, pages 64–77, Berlin, Heidelberg. Springer
Berlin Heidelberg.
Ding, W., Liu, K., Cheng, F., and Zhang, J. (2016). Lear-
ning Hierarchical Spatio-temporal Pattern for Human
Activity Prediction. Journal of Visual Communication
and Image Representation, 35:103–111.
Ikizler-cinbis, N. and Sclaroff, S. (2010). Object, Scene
and Actions : Combining Multiple Features for Hu-
man Action Recognition. In 11th European Confe-
rence on Computer Vision (ECCV), pages 494–507.
Ji, S., Xu, W., Yang, M., and Yu, K. (2013). 3D Convolutio-
nal Neural Networks for Human Action Recognition.
IEEE Transaction on Pattern Analysis and Machine
Intelligence, 35(1):221–231.
Kim, D., Yun, W.-h., Yoon, H.-s., and Kim, J. (2014).
Action Recogntion with Depth Maps Using HOG
Descriptors of Multi-view Motion Appearance and
History. In UBICOMM 2014 - 8th International Con-
ference on Mobile Ubiquitous Computing, Systems,
Services and Technologies, pages 126–130.
Koperski, M., Bilinski, P., and Bremond, F. (2014). 3D
Trajectories for Action Recognition. In IEEE Interna-
tional Conference on Image Processing (ICIP), pages
4176–4180.
Kundu, M. K., Mohapatra, D. P., Konar, A., and Chakra-
borty, A. (2014). Advanced Computing - Volume 2,
Wireless Networks and Security Proceedings of the
Second International Conference on Advanced Com-
puting, Networking and Informatics (ICACNI-2014),
Springer.
Li, W., Zhang, Z., and Liu, Z. (2010). Action Recogni-
tion Based on A Bag of 3D Points. IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition - Workshops (CVPRW), pages 9–14.
Lisin, D. A., Mattar, M. A., Blaschko, M. B., Learned-
Miller, E. G., and Benfield, M. C. (2005). Combining
Local and Global Image Features for Object Class Re-
cognition. In Proceedings of the IEEE Computer So-
ciety Conference on Computer Vision and Pattern Re-
cognition (CVPR), volume 3, Washington, DC, USA.
IEEE Computer Society.
Luo, Z., Peng, B., Huang, D.-A., Alahi, A., and Fei-Fei, L.
(2017). Unsupervised Learning of Long-Term Motion
Dynamics for Videos. IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 1–10.
Mahesh, Y., Shivakumar, D. M., and Mohana, D. H. S.
(2015). Classification of human actions using non-
linear svm by extracting spatio temporal hog features
with custom dataset. International Journal of Rese-
arch In Science & Engineering (IJRISE), 1:1–6.
Local and Global Feature Descriptors Combination from RGB-Depth Videos for Human Action Recognition
271

Meng Meng, Drira, H., Daoudi, M., and Boonaert, J.
(2015). Human-object interaction recognition by le-
arning the distances between the object and the skele-
ton joints. In 11th IEEE International Conference and
Workshops on Automatic Face and Gesture Recogni-
tion (FG), pages 1–6.
Niebles, J. C. and Fei-Fei, L. (2007). A Hierarchical Model
of Shape and Appearance for Human Action Classifi-
cation. In IEEE Conference on Computer Vision and
Pattern Recognition (CVPR), pages 1–8.
Nourani-Vatani, N., Borges, P. V. K., and Roberts, J. M.
(2012). A study of feature extraction algorithms for
optical flow tracking. In Proceedings of Australa-
sian Conference on Robotics and Automation, Victo-
ria University of Wellington, New Zealand., pages 1–
7.
Shi, Y., Zeng, W., Huang, T., and Wang, Y. (2015). Learning
Deep Trajectory Descriptor for action recognition in
videos using deep neural networks. IEEE Internatio-
nal Conference on Multimedia and Expo (ICME), pa-
ges 1–6.
Soares Beleboni, M. G. (2014). A brief overview of Mi-
crosoft Kinect and its applications. Interactive Mul-
timedia Conference, University of Southampton, UK,
pages 1–6.
Solmaz, B., Assari, S. M., and Shah, M. (2013). Classifying
web videos using a global video descriptor. Machine
Vision and Applications, 24(7):1473–1485.
Somasundaram, G., Cherian, A., Morellas, V., and Papa-
nikolopoulos, N. (2014). Action recognition using
global spatio-temporal features derived from sparse
representations. Computer Vision and Image Under-
standing, 123:1–13.
Uijlings, J., Duta, I. C., Sangineto, E., and Sebe, N.
(2015). Video classification with Densely extrac-
ted HOG/HOF/MBH features: an evaluation of the
accuracy/computational efficiency trade-off. Interna-
tional Journal of Multimedia Information Retrieval,
4(1):33–44.
Wang, H., Kl
¨
aser, A., Schmid, C., and Liu, C.-L. (2013a).
Dense Trajectories and Motion Boundary Descrip-
tors for Action Recognition. International Journal of
Computer Vision, Springer Verlag, 103(1):60–79.
Wang, H. and Schmid, C. (2013). Action Recognition with
Improved Trajectories. IEEE International Confe-
rence on Computer Vision (ICCV), pages 3551–3558.
Wang, J., Liu, Z., Wu, Y., and Yuan, J. (2014a). Learning
Actionlet Ensemble for 3D Human Action Recogni-
tion. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence, 36(5):914–927.
Wang, L. and Suter, D. (2007). Recognizing Human Activi-
ties from Silhouettes: Motion Subspace and Factorial
Discriminative Graphical Model. In EEE Computer
Society Conference on Computer Vision and Pattern
Recognition (CVPR).
Wang, Y., Li, Y., and Ji, X. (2013b). Recognizing Human
Actions Based on Gist Descriptor and Word Phrase.
Proceedings of International Conference on Mecha-
tronic Sciences, Electric Engineering and Computer
(MEC), pages 1104–1107.
Wang, Y., Li, Y., and Ji, X. (2014b). Human Action Re-
cognition Using Compact Global Descriptors Derived
from 2DPCA-2DLDA. In Proceedings of IEEE In-
ternational Conference on Computer and Information
Technology (CIT), pages 182–186.
Wang, Y., Li, Y., and Ji, X. (2015a). Human Action Recog-
nition Based on Global Gist Feature and Local Patch
Coding. International Journal of Signal Processing,
Image Processing and Pattern Recognition, 8(2):235–
246.
Wang, Y., Li, Y., Ji, X., and Liu, Y. (2015b). Compari-
son of Grid-Based Dense Representations for Action
Recognition. In Intelligent Robotics and Applicati-
ons, Springer International Publishing, pages 435–
444, Cham. Springer International Publishing.
Wang, Y. and Mori, G. (2010). Hidden Part Models for
Human Action Recognition: Probabilistic vs. Max-
Margin. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 33(7):1310–1323.
Weinland, D., Ronfard, R., and Boyer, E. (2006). Free Vie-
wpoint Action Recognition Using Motion History Vo-
lumes. Computer Vision and Image Understanding,
104(2):249–257.
Xiao, Y., Zhao, G., Yuan, J., and Thalmann, D. (2014).
Activity Recognition in Unconstrained RGB-D Video
Using 3D Trajectories. In SIGGRAPH Asia Autono-
mous Virtual Humans and Social Robot for Telepre-
sence, pages 1–4, New York, NY, USA. ACM.
Xie, J., Jiang, S., Xie, W., and Gao, X. (2011). An efficient
global K-means clustering algorithm. JOURNAL OF
COMPUTERS (JCP), 6(2):271–279.
Xue, H., Zhang, S., and Cai, D. (2017). Depth Image In-
painting: Improving Low Rank Matrix Completion
With Low Gradient Regularization. IEEE Transacti-
ons on Image Processing, (9):4311–4320.
Yang, X. and Tian, Y. (2016). Super Normal Vector for Hu-
man Activity Recognition with Depth Cameras. IEEE
Transactions on Pattern Analysis and Machine Inteli-
gence, pages 1–12.
Yu, G., Liu, Z., and Yuan, J. (2015). Discriminative order-
let mining for real-time recognition of human-object
interaction. Lecture Notes in Computer Science (in-
cluding subseries in Artificial Intelligence and Bioin-
formatics), 9007:50–65.
Zanfir, M., Leordeanu, M., and Sminchisescu, C. (2013).
The Moving Pose: An Efficient 3D Kinematics Des-
criptor for Low-Latency Action Recognition and De-
tection. Proceedings of the IEEE International Confe-
rence on Computer Vision (ICCV), pages 2752–2759.
Zhang, H. and Parker, L. E. (2016). oDe4D: Color-Depth
Local Spatio-Temporal Features for Human Activity
Recognition from RGB-D Videos. IEEE Transacti-
ons on Circuits and Systems for Video Technology,
26(3):541–555.
Zhao, Y., Liu, Z., Yang, L., and Cheng, H. (2012). Combing
RGB and Depth Map Features for Human Activity
Recognition. In Proceedings of The Asia Pacific Sig-
nal and Information Processing Association Annual
Summit and Conference, pages 1–4.
Zhu, G., Zhang, L., Shen, P., and Song, J. (2016). An
Online Continuous Human Action Recognition Algo-
rithm Based on the Kinect Sensor. MDPI, Sensors
(Basel), 16(2):1–18.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
272
