
Fast and Reliable Update Protocols in WSNs During
Software Development, Testing and Deployment
Tobias Schwindl, Klaus Volbert and Sebastian Bock
Technical University of Applied Sciences Regensburg, Germany
Keywords:
WSN, Software Update, Low-Power Devices.
Abstract:
A lot of research has been done in the area of Wireless Sensor Networks during the past years. Today, Wireless
Sensor Networks are in field in many different ways and applications (e.g. energy management services, heat
and water billing, smoke detectors). Nevertheless, research and development is continued in this area. After
the network is deployed, software updates are performed very rarely, but during development and testing one
typical, high frequented task is to deploy a new firmware to thousands of nodes. In this paper, we consider such
a software update for a special, but well-known and frequently used sensor network platform. There exist some
interesting research papers about updating sensor nodes, but we have a special focus on the technical update
process. In this context, we show the reasons why these existing update processes do not cover our challenges.
Our goal is to allow a developer to update thousands of nodes reliably and very fast during development and
testing. For this purpose, it is not so important to perform the best update with regard to energy consumption.
We do not need a multi hop protocol, because all devices are in range, e.g., in a laboratory. In our work, we
present a model of the update process and give very fast protocols to solve it. The results of our extensive
simulations show that the developed protocols do a fast, scalable and reliable update.
1 INTRODUCTION
Wireless Sensor Networks are used in various envi-
ronments. Some basics of such wireless networks are
described in (Akyildiz et al., 2002), (Chong and Ku-
mar, 2003), (Schindelhauer et al., 2007), (Lukovszki
et al., 2006) and (Meyer auf der Heide et al., 2004).
Special restrictions regarding power and time man-
agement in these systems are shown in (Sivrikaya and
Yener, 2004) and (Sinha and Chandrakasan, 2001)
Many example applications and its areas are shown
in (Altmann et al., 2016; Kenner et al., 2016; Kenner
and Volbert, 2016; Schlegl et al., 2014). Since most of
these sensor networks are energy constrained one of
the main goal of every application in such an environ-
ment is to secure that the lifetime of every node is as
long as possible and simultaneously reach a satisfac-
tory performance level. In specific cases, e.g., after
production of devices, inital firmware must be pro-
grammed to the nodes. This requires that every device
gets the firmware and could be realized with a wire-
less update mechanism. A company which produces a
lot of radio hardware, e.g., smart devices like wireless
smoke detectors or heat cost allocators does not want
to programm and/or update all devices one by one, but
instead with one wireless update run. In this laborato-
rylike scenario, the update process must ensure that
the firmware is transmitted completely and without
errors. All nodes should receive the firmware and this
should happen automatically, meaning no user is re-
quired to update the nodes. As many wireless sensor
nodes are battery driven one goal of most update pro-
cesses is to reduce power consumption and simulta-
neously minimize the update time. Most update pro-
tocols use different approaches to ensure these points.
As we show in the chapter 2 most update mechanisms
do resolve more issues than needed, hence this results
in additional effort to realize this update protocols on
a real hardware. This is one reason for us to introduce
a new update protocol optimized for a specific use
case. This use case is the programming of software
on all used sensor nodes during the development pro-
cess for a sensor network. At one point in the devel-
opment process this means that sensor nodes need an
update, to test new code or to extend the current code
base to more devices. This includes the possibility
that the firmware update is needed for a small amount
of nodes, but at another point in the development pro-
cess this can mean that a very large amount of nodes,
i.e. thousands or tenthousands of nodes have to get an
Schwindl, T., Volbert, K. and Bock, S.
Fast and Reliable Update Protocols in WSNs During Software Development, Testing and Deployment.
DOI: 10.5220/0006534400190030
In Proceedings of the 7th International Conference on Sensor Networks (SENSORNETS 2018), pages 19-30
ISBN: 978-989-758-284-4
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
19

update. Such sensor nodes, if no wireless update pro-
tocol is useable, are programmed with a simple hard-
ware tool like the Gang-Programmer (TI, 2017) that
can update a small number of nodes simultaneously.
Such a device is used, e.g., in Germany to programm
nodes which are ready for production use. Since we
had known the different scenarios for the update pro-
cess itself, the scalability of such a design for the com-
plete process was one important requirement. The
next goal of our update model was the minimization
of the program time of each and every node. Every
time a new software is added to the nodes in the sen-
sor network there is a delay until new software can
be tested, i.e. the programming time of the nodes.
Furthermore, in a deployed wireless sensor network
the amount of updates should be minimized since the
update as such uses a lot of power and therefore bat-
tery lifetime is strongly reduced. This implies that
power consumption of an update process is one of the
most important things in a deployed network, but in
our scenario not the main goal. The protocol we de-
signed tries to minimize the power consumption as
much as possible, but there are possibly more sophis-
ticated approaches to reach this goal (done in other
protocols). The flawless and complete transmission
of the new code are naturally important factors since
the update protocol would otherwise not be reliable.
As a result either manual intervention or many update
runs would be needed to secure that all devices re-
ceive the new application. This said, such an update
mechanism would not be very useful.
2 BACKGROUND & RELATED
WORK
The problem of programming nodes in wireless sen-
sor networks is discussed in many articles. A sur-
vey is given by (Brown and Sreenan, 2013) and in
(Wagn et al., 2006), a smaller overview of some up-
date mechanism is also shown in (Sternecker, 2012).
There are various solutions for several hardware plat-
forms and specific use cases. While some of these
protocols are designed for a specific hardware to run
on, or only allow partial updates efficiently, e.g, by in-
cremental/compressed or differential updates shown
in (Stolikj et al., 2012) and (Rickenbach and Watten-
hofer, 2008), try others to be a more generic solution
for the process of software updates in WSNs. Many of
these protocols, e.g., Deluge (Hui and Culler, 2004),
MOAP (Stathopoulos et al., 2003) or Trickle (Levis
et al., 2004) use the idea of a four step process (Brown
and Sreenan, 2013) to ensure the needed functional-
ity. This process is shown in Figure 1 and consists
Node A
Source
Node B
Target
1. Advertisment
3. Request
2. Selection
4. Download
Figure 1: Dissemination idea for update protocols.
of four steps.
The first step (advertising) ensures that all nodes
know the current software version. If there is more
than one source that could provide the needed soft-
ware, a target must choose the best source, e.g., by
checking the quality of the radio channel to the differ-
ent possible sources (selection). These two steps in-
clude the idea of multiple sources and therefore mul-
tiple senders. At the same time these protocols often
use the idea of multihop. This approach allows reach-
ing nodes not only within the transmission area of one
device, but to reach every node in a wide sensor net-
work. Such multihop protocols can distribute code to
nodes which are not in direct reach of the source, but
receive new software from in between nodes. This
idea may be the optimal solution for some problems
with appropriate hard- and software but does not ful-
fill our needs for the complete application program-
ming of a large amount of wireless sensor nodes while
developing software. All these programmable devices
are within a small area, therefore reachable for one
sender within this area. If the concept of multiple
senders would be used, this could lead to interference
with other sources in this network. Consequently, a
mechanism would be needed to ensure that this kind
of interference, i.e. colliding messages, does not oc-
cur. Our update model does not include the idea of
multiple senders, hence this allows us an easy mech-
anism to broadcast messages, because there is only
one sender and therefore this message can not collide
with other messages. There are simply no other mes-
sages at the same time in our complete system. The
third step (request) initiates communication between
source and target. The final step is the actual down-
load of the requested data to update the target node.
After all these steps are completed, the new software
is executable on every node that received the update.
Such sophisticated update models solve crucial prob-
lems to their special use case(s). But the additional
steps of advertising and necessary following selec-
tion would need more time and energy in our sce-
nario. Since we have a very dense network these steps
do only include their disadvantages, nonetheless they
would work with such networks. Though the advan-
SENSORNETS 2018 - 7th International Conference on Sensor Networks
20

tages of such an approach would be lost and there-
fore these kinds of methods do add unnecessary over-
head. Analysis of existing software update mecha-
nisms is the reason for our different approach to the
problem of updating sensor nodes. All these proto-
cols are not satisfactorily for our challenges, admit-
ting they do cover their specific problems very well.
The next chapter does introduce our protocol ideas to
reach a fast and reliable update while developing new
software for sensor networks.
3 OUR APPROACH
In this chapter we describe basic ideas of the update
protocol and give reasons for their use. The process
is designed to update any amount of nodes in reason-
able time. The update itself does only support full
updates, i.e. there is no possibility to update a part
of the firmware while keeping other parts of the soft-
ware. The complete flash memory is reprogrammed
with the new code. Since we designed and imple-
mented the update process for a specific hardware
from Texas Instruments (TI) we used existing soft-
ware and ideas where possible, but nonetheless these
ideas can be easily used for other systems as well.
The already available TI 1:1 update process was the
basis for our further development. In the existing up-
date mechanism a code distributor, described in the
next chapter, communicates over USB with a pc ap-
plication to collect the source code and send this new
code to the update device, the sensor node. The TI
update process needs specific software on the sensor
node, which will be updated, to work. Because of
that, the update process is only one-time executeable.
If the new loaded software does not support the spe-
cific sequence to launch and execute the update pro-
cess, the complete process is not useable any longer,
but must be manually flashed again. This kind of lim-
itations were another reason for the development of a
more practical update mechanism. The TI software,
after the wireless update is started and initialization
process is complete, does use a simple stop and wait
method, meaning that after every single data packet
an acknowledgement from the device is expected. If
validation is positive the next data packet is ready for
transmission. Otherwise, the current data packet will
be sent again. This idea was extended and adapted
to get it working with more than one device. The
new approach does work similar, although currently
not every packet is validated, but after a specific num-
ber of data packets the update device transmits an ac-
knowledgement packet to advert the current position
in the complete update process. This is also known
as a go-back-N protocol. While the source code dis-
tributor receives good acknowledgement packets, i.e.
no error occurred, it continues with the next valid data
packet. A bad packet indicates an error and this data
packet will be sent again as long as all update devices
do not correctly receive it. The bad data packet is now
the new position in the update and from there on all
packets are transmitted. However, an error is not rec-
ognized immediatley, but only with the next acknowl-
edgement. Since the process is designed to work with
any amount of sensor nodes it must be ensured that
all nodes know when to send their acknowledgement
packet, otherwise some transmissions will fail due to
interference with other possible transmissions. This
is secured by the used time division multiple access
(TDMA) mechanism. Every node has a specific, fixed
time interval when to send the acknowledgement. The
first easy idea and implementation uses the TDMA
mechanism after a fixed amount of data packets in-
dependent whether the radio channel is of good or
bad quality. A bad transmission channel could re-
sult then in slow error recognition. On the contrary
when the radio channel is quite good the acknowl-
edgement phase is kind a waste of time since an er-
ror is not very likely. An update protocol, which uses
the information about the radio channel and its qual-
ity could save both time and energy since it decides
flexible when an ack phase is needed more often. The
adaption to the quality of the current radio channel
is used in different environments. In some TCP/IP
implementations there is a mechanism called AIMD
(Additive Increase Multiplicative Decrease). When
the error rate is low the ack phase is used very rarely,
but is increased by a multiplicative factor after an er-
ror occurred, originally shown in (Jacobson, 1988).
A detailed analysis of the algorithms is presented in,
e.g., (Edmonds, 2012) and (Karp et al., 2000). A sim-
ilar, simplified mechanism is used by our second de-
signed update protocol. The idea was to get a bet-
ter adaption to the actual needed acknowledgement
rate given by the physical quality of the radio chan-
nel. Mechanisms, messages and its sequences to ini-
tialize the update process are presented and analyzed
in 5.1. The complete update protocol, not only the ac-
knowledgement phase of the process, is a time based,
shared protocol, meaning all sensor nodes share the
same system time. Data packets with new code come
every fixed time step and all nodes can synchronize
with the system time with every data packet which
is received. This ensures that every update device, if
correctly synchronized with the code distributor (mas-
ter clock), can switch to receive mode very shortly
before the packet is transmitted by the update distrib-
utor. This saves a lot of energy since update nodes
Fast and Reliable Update Protocols in WSNs During Software Development, Testing and Deployment
21

are only in RX mode when it is absolutely manda-
tory. Due to the natural clock drift every update node
must synchronize itself with the master clock, which
in this case is the clock from the source code distrib-
utor. This secures that RX windows remain narrow.
This basic idea is valid for a lot of update scenarios.
These ideas show that practical relevance of the up-
date mechanism is of real interest here, as the theoret-
ical background of our update model is not extremely
difficult. In the next chapter we describe our specific
hardware and software model on which we actually
implemented and tested these update designs and pro-
tocols.
4 SOFTWARE & HARDWARE
ARCHITECTURE
The software architecture and its distribution is based
on the hardware devices used. Because the update
protocol has several tasks, we operate with different
devices, which are suited for their special function.
The participants, which are involved in our update
model are the sensor node (CC430), the distributor
of the update code (access point) and the user inter-
face represented as a desktop application. The CC430
is a programmable watch delivered within the eZ430
Chronos development kit. This device (CC430F6137)
is the sensor node in our environment and includes
an integrated sub-1GHz wireless radio module based
on the CC1101. It stores a bootloader (max. 2KB)
which handles the complete update process on watch
side. Therefore, the code size of the complete update
protocol software must be less than 2KB, including
device drivers for the flash, ports and radio modules.
This limitation allows only a small implementation as
a more complex protocol could lead easily to a code
size greater than the available bootloader ROM size.
The eZ430 comes with 32KB of internal flash mem-
ory and 4KB of RAM (TI, 2013b). The microcon-
troller supports different internal sensors and offers
different power modes to save energy. While not in
active mode (AM), but waiting for external/internal
events, e.g., expired timers or incoming radio packets,
it can switch to different low power modes (LPM0 –
LPM4). In our scenario the most update time is spent
in LPM3. The lowest power mode LPM4 disables all
clocks, which are needed to provide a stable time base
and hence, this mode cannot be used by our protocol.
The access point is a MSP430f5509 with a CC1101
radio core (TI, 2015) which is used for communica-
tion with the watch. The access point does contain a
USB interface for further communication with other
USB devices. This device is responsible for dissemi-
Software for Code Distribut ion
AccessPoint witch CC1101
Device1
Device2
Device3
Device N
Device4
Device5
Figure 2: Overview of update model.
nation of update messages, e.g., the new code, mean-
ing it regulates the complete sequence of the update.
The third involved party is the user interface. This ap-
plication handles the firmware file and partition into
small update packages so the access point does not
need to perform further actions with the packages, but
only broadcasts them to the watches. Communication
between access point and GUI is handled via the USB
interface. The complete structure of our update model
is shown in Figure 2.
All watches are distributed in a small area within
radio reach of the access point. But other than that,
no additional requirements must be met. The update
is started by the application and after that no user in-
tervention is needed. The access point does now com-
municate with all watches in radio reach to update
these nodes. In the design of the complete update pro-
tocol, communication between different sensor nodes,
i.e. the CC430 devices, is not planned. From the
update devices perspective it is a 1:1 communication
with the access point. On the contrary the access point
distributes code to all devices, hence this is a 1:n com-
munication. The specific timings of messages and its
sequences are presented in the next chapter.
5 ANALYSIS
In this chapter we analyze the update protocol and
its different states. We show how we calculated the
power consumption as well as the computation of the
execution time of the update process.
5.1 Protocol Overview
All possible and used messages in the system are
SENSORNETS 2018 - 7th International Conference on Sensor Networks
22
0xAA 0xD391 0x03 0xAA 0xFF 0xFF CRC
Payload
RFU
Message
Length
AP
Address
Preamble
4 Bytes
0xD391
SyncWord
4 Bytes
0x03 0xAA
nextPacket
MSB
nextPacket
LSB
CRC
Payload
ACK
0xAA
Preamble
4 Bytes
0xD391
SyncWord
4 Bytes
0x05 0xAB
ID MSB ID LSB
CRC
Payload
RFU_ACK
Message
Length
Watch
Address
waitTime
MSB
waitTime
LSB
Preamble
SyncWord
Payload
CRC
Hardware
Software
0xAA
Preamble
4 Bytes
0xD391
SyncWord
4 Bytes
0x06 AB
TDMA size
totalPKT
LSB
CRC
Payload
Init Message
Message
Length
Watch
Address
0xAA
Preamble
4 Bytes
0xD391
SyncWord
4 Btyes
currPayloa d
0xAB 0xAA
currentPKT
MSB
CRC
Payload
Data Packet
Message
Length
Watch
Address
totalPKT
MSB
maxID LSB maxID MSB
currentPKT
LSB
OP Code
Data
(100Byte)
0xAA
Preamble
4 Bytes
SyncWord
4 Bytes
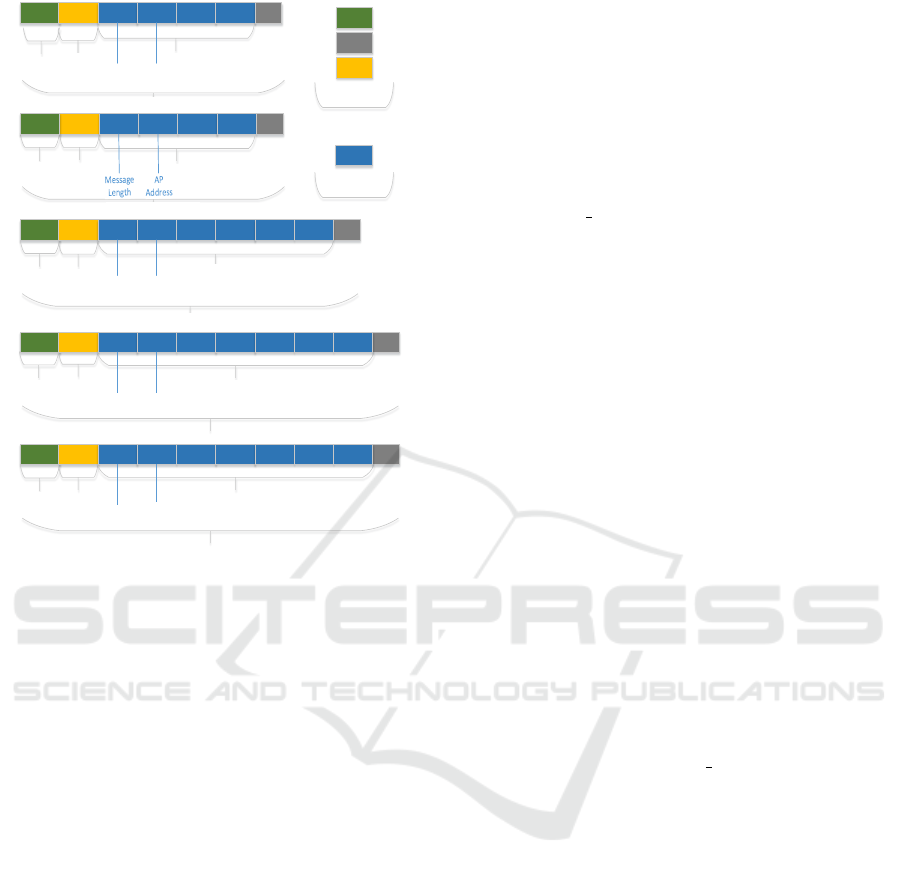
Figure 3: Protocol messages in the updatesystem.
shown in Figure 3. As seen in the protocol messages,
the hardware settings of the radio communication in-
clude 4 byte preamble and 4 byte sync word. The
preamble is an alternating sequence of ones and ze-
ros, i.e. 0xAA is transmitted. The sync word contains
application specific data and is used for byte synchro-
nization. Additionally, it allows a differentiation be-
tween systems with the same hardware as the radio
writes only data to the internal buffer if the correct
synchronization word is received (TI, 2013a). In our
application it is used with the value of 0xD391, which
is used twice to get a 4 byte sync word. The 16 bit
checksum calculation is enabled, therefore it is not
necessary to check for errors in software as corrupted
packets are removed automatically. The data packets
data field is flexible, meaning during the update run
the access point could decide to increase or decrease
the payload length. This mechanism is currently not
used, but could be used in future versions. All other
messages have fixed length and can not change its size
during protocol execution.
The exact sequence of the complete update pro-
cess is shown in Figure 4. To start the firmware update
mechanism all watches must execute its bootloader
software. This can be done via reset of the device
either manually or by triggering a software reset, if
supported by the current firmware. Then the boot-
loader is executed where it is possible to start the up-
date (automatically if in a specific time interval no
user input was performed) or execute the application.
After the device has started the bootloader, the update
devices now transmit every specific time interval, e.g.,
3 seconds, the RFU (ReadyForUpdate) message. If
the access point receives such a message (this mes-
sage comes from a watch which has not an update
ID and therefore was not recognized yet) it answers
with the RFU ACK message and sets update ID for
this watch and update run. The frequency of the RFU
message determines how often the watch can send its
beacon during discovery phase of the update, e.g., if
an error occurred or some other watch is sending si-
multaneously and another RFU message is needed.
To prevent most of the colliding messages in the dis-
covery phase a hardware mechanism is used. The dis-
covery phase is the only state where collision between
different messages is possible. In all other states there
is only one message at a time in the complete sys-
tem. To save energy after this short communication
the watch does now go into LPM3. After a specific,
by the user configurable amount of time the discov-
ery phase is finished and the update goes into next
state, i.e. init state. At this point all watches that need
an update should be recognized by the access point.
This is ensured by setting an appropriate time value
for the watches to be in the discovery update state.
All watches wake up at the same time, very shortly
before the first actual packet is sent and now listen to
the first update package, i.e. init packet. This is pos-
sible due to time information the devices have from
the previous communication with the access point,
which is included in the RFU ACK message. The init
packet does contain some information about update
size, number of update devices and some information
about the acknowledgement phase and its length. If
during this process a watch does not get an answer for
the RFU message or does not get the init message cor-
rectly this device does not participate in the follow-
ing update process, rather resets itself. After this init
mechanism for every node is successfully completed,
the actual update starts. In this case an adjustable, but
during the update process fixed, number of data pack-
ages is transmitted before the first acknowledgement
phase is started. All packets come in specific time ar-
eas, so all watches can go into RX mode very shortly
before the actual packet transmission starts.
This ensures that a very small amount of power is
needed, since RX time is not longer than absolutely
needed given by physical parameters plus calibration
time. The time between data packets is 100ms and
5 packets are sent in a row before starting with the
acknowledgement phase. That said, the data packet
Fast and Reliable Update Protocols in WSNs During Software Development, Testing and Deployment
23

loop
AP Device1 Device2 DeviceN
RFU
RFU ACK
RFU
RFU ACK
RFU
RFU ACK
Init
4x PKT
ACK
ACK
ACK
Discovery
Init
Data
TDMA
Data
5x PKT
ACK
ACK
ACK
TDMA
Figure 4: Protocol schedule during the update.
round is 500ms long. After the data packets are
received, meaning 500ms packet round with 5 sent
packets is over, the update devices, whether they re-
ceived packets successfully or not, trigger the next
and last state, the TDMA phase. If an error oc-
curred at the beginning of the data phase all follow-
ing packets are lost as well. This is due to the de-
sign of the protocol, an update device is only able to
save the current state in the complete update, but not
single packets which are needed to complete the up-
date. This behaviour could be changed in future ver-
sions to improve the update. The complete TDMA
window is divided into small time windows for each
and every node. The length of this phase is depen-
dent on the number of sensor nodes, which partici-
pate in the update run. Every update node has the
chance to send an acknowledgement packet which in-
cludes the packet number that is expected next, there-
fore, this information contains the last successfully re-
ceived packet number. After this TDMA mechanism
the access point has all needed data to decide which
packet should be transmitted next, i.e. the smallest
packet number that was received by the access point.
If an ack from a node is lost, for whatever reason,
there is no error handling. Next time the ack phase
starts there is another chance for this node to send its
ack successfully. After every TDMA, the data phase
is started again. This process is repeated until no more
acks with a packet number below the highest possible
packet number is received, therefore all nodes have
the complete new code. Every node that has received
all needed packets successfully, resets itself automati-
cally and starts the new application if there was user
input, otherwise the bootloader waits for another up-
date run, meaning the device start with sending the
RFU message. This process can be aborted by spe-
cial input to easily start the application. The ac-
knowledgement phase is the most complex phase of
the complete update protocol. The more devices are
participating in one update run, the longer this phase
must be. The ack phase is always determined by a
specific integer factor of this 100ms, dependent on
how many devices need an update. This factor does
increase by 1 every 10 nodes. The decision to set
these specific timing intervals were made after eval-
uating the USB communication between the access
point and the pc application.
5.2 Calculations – Power Consumption
Since power consumption of an update protocol is an
important requirement in the design of such a process
the exact energy consumption of all messages are pre-
sented in this chapter. Power consumption of the up-
date process is split into four states of the watch: the
active mode and LPM3 of the watch and its CPU, the
receiving (RX) and the transmitting (TX) mode of the
radio module. Table 1 shows different power levels
of these states in mA. To ensure low power consump-
tion, the completion time as well as radio transmis-
sions should be minimized and update time should be
spent in LPM3 whenever possible. The latter can be
reached by an exact time based protocol as we have
designed. The timings of each update state is known
to every single device, hence the active time of any de-
vice is minimized to the actually needed active time.
The rest of the update time is waiting for an event to
get triggered or to let other devices finish their trans-
missions.
Table 1: Power consumption @12MHz (TI, 2013b).
Voltage IDLE+CPU active TX RX LPM3
3.0V 1.7 + 2.75 33 16 0.0022
Power Consumption in Ah, length of the messages in
bytes and the timings (RX and TX) in ms of our mes-
sages are shown in Table 2 (from watches perspec-
tive, the access point power consumption is kind of
neglectable since its not battery driven, but always on
a secure power connection). The bytes added and re-
moved automatically by hardware, i.e. the preamble,
sync word and the checksum are already included,
meaning the actual useable data is always 10 bytes
less. This overhead is mandatory for all messages
transmitted by the radio module. The shown power
consumption is in 10
−9
Ah.
Timings and consequently power consumptions for
these messages are valid for a 250’000 bits per sec-
SENSORNETS 2018 - 7th International Conference on Sensor Networks
24

Table 2: Power consumption of different messages.
Type Length TX Time RX Time Power
RFU 14 0.45 0.00 4.10
RFU ACK 16 0.00 0.51 2.27
InitPacket 17 0.00 0.54 2.41
DataPacket 116 0.00 3.20 14.22
ACK 14 0.45 0.00 4.10
ond transmission rate. Since the radio module needs
calibration every time a communication is initialized
a value of 721µs with a power consumption of 9.5mA
must be added to every receive or transmit operation
(TI, 2013b). This results in additional 1.9 · 10
−9
Ah
per radio event. Now we know all needed values to
compute the complete power consumption of the CPU
plus radio module during one update run. Following
formula shows the power consumption for the radio
module for all transmissions:
radio power
active
= a· RFU + a· RFU ACK +
InitPacket + b· DataPacket + c· ACK +
(2a + 1 + b + c)· 1.9 · 10
−9
Ah
where a is the number of RFU messages the watch
sends, b the number of data packets were received by
the watch and c the number of acks the device is send-
ing during the update run. Since exact radio idle time
is hard to determine we calculate the radio as always
idle, knowing this is not correct but sound. This for-
mula represents the radio power consumption for the
idle state and must be added to the complete power
consumption:
radio power
idle
= 1.7mA · updateTime
The CPU is at least 90% of the update time in LPM3.
The only CPU activity while updating the firmware,
is before transmission and after or during receiving
(when the FIFO hardware buffer is full) of a radio
packet, since these events are interrupt-driven and
wake up the CPU from all low power modes. Ad-
ditional CPU active time is needed before the update
starts and after a data packet was received, because
this data must be written to internal flash memory. So
we can calculate the worst case active CPU time and
its power consumption with 10% of the update time,
knowing the exact CPU active time is dependent on
how many packets were received/transmitted. How-
ever the 10% calculated time is surely higher than
in the actual implementation. Every 100ms the radio
waits for a data packet, which needs time for receiv-
ing (copy values, sync mechanism) and when success-
fully received the time for writing it to the flash mem-
ory. After some evaluation of these operations we can
safely assume these operations do not need 10ms and
this would be the time value to reach the 10% active
CPU time. To get a wrong but safe bound we add, as
the exact CPU active time is also hard to determine,
for the complete run
CPU power
LPM
= 0.90 · updateTime · 2.2 µA
and for the active state of the CPU
CPU power
active
= 0.10 · updateTime · 2.75 mA.
During an update run the complete main flash mem-
ory of the device is erased and reprogrammed. These
memory operations also need time and energy. Tim-
ings and power consumptions of all flash operations
are shown in (TI, 2013b). We calculate the power
consumption during erase with the given typical value
of 2mA and during programing with 3mA. While full
erasing does need maximal 32ms, the complete pro-
graming time of the CC430 flash memory takes about
800ms of active write operation. All flash instruc-
tions summorized result in 6.9 · 10
−7
Ah, which must
be added to the power consumption of one update run.
The sum of radio
active
, radio
idle
, CPU
LPM
, CPU
active
and write and erase operations on the flash memory
give now the complete power consumption needed by
one sensor device during one firmware update. The
best case (one device, minimum amount of packets
are sent) of an update with a size of 27KB, a data
packet payload length of 100Bytes and a TDMA win-
dow after every 5 data packets, can now be calcu-
lated. The minimum amount of packets needed are
1 RFU message and its 1 ACK, the 1 init package
which is followed by 270 data packets and in between
of the data packets there are 54 acknowledgement
packets needed. This results in 327 radio transitions.
The minimum update time is 27s, i.e. the 270 pack-
ets with one packet in 100ms, plus discovery phase
length which is calculated with 7s – this is the value
we used for our later shown experiments. This results
in 6.01 · 10
−6
Ah for the active radio, 1.27 · 10
−8
Ah
for the idle radio, 1.87 · 10
−8
Ah for the LPM of the
CPU and 2.60 · 10
−6
Ah for the active CPU time. As
a result a total amount of 9.33 · 10
−6
Ah is used by
one update run, if exactly one device is involved. If
more devices are used power consumption increases,
but only because the time in LPM3 goes up. With
1000 devices the additional power consumption for
LMP3 is about 2.94 · 10
−7
Ah. This is much less than
1/10 of the complete update process of one device,
therefore does not significantly decrease the number
of possible update runs for these devices. The num-
ber of radio transmissions and the CPU active times
do not increase, but stay the same.
The eZ430 chronos watch contains a standard
CR2032 lithium battery with a nominal capacity of
220 mAh (CR2, ). This results in about 23’500
possible best case update runs before the battery is
empty. This should be sufficient for most develop-
ment processes. Although these results show only
Fast and Reliable Update Protocols in WSNs During Software Development, Testing and Deployment
25

the best case with 1 involved device and hence er-
rors would decrease the number of possible updates
accordingly. An error rate of 1% would increase the
needed amount of packets at least to 273, more likely
an even higher number of packets is needed due to
the design of the error detection, but also increases
the CPU active time and the LPM time. The maxi-
mum amount of packets (worst case) for a packet er-
ror rate of 1% is 285, every error occurred directly
after the ack phase and therefore all other packets in
this data round are lost too. This results in additional
3 more acks and 15 more packets, i.e. a total amount
of 2.26 · 10
−7
Ah must be added to the power con-
sumption.
5.3 Calculations – Time
The main goal during development of the update pro-
tocols was to achieve a fast and reliable process and
hence time evaluation of the update process is impor-
tant. The time, that an update run needs can be calcu-
lated as follows:
completionTime = Time
discoveryPhase
+ Time
dataPackets
+ Time
TDMA/ACK phase
The user currently sets time of the discovery phase.
In this time slot each node has to complete its RFU
communication and hence the more devices are up-
dated the longer this time should be. Time needed for
transmitting all the data packets is dependent on the
update size. The useable flash memory of the device
is 32KB, which results currently, since the data pay-
load of one packet is 100 bytes, in maximal 32 sec-
onds. The TDMA/ACK phase of the update is calcu-
lated differently and dependent on number of sensor
nodes which need an update. The first 10 devices can
use the normal time between 2 data packets to send
their acknowledgements, but after that every 10 de-
vices get an additional 100ms time slot to send the
ack packet. Thus, the TDMA time can be computed
as follows:
Time
TDMA/ACK
= (#devices - 1) / 10 · 100ms · #acks
This time increases with growing number of update
devices and becomes the most important factor that
determines how long an update run needs to finish.
With, e.g., 1000 devices and an update size of 27KB
time spent in the TDMA phase is about 535 seconds,
while the actual sending of the packets is 27 seconds.
Thus, in later improvements of the update protocol
the time spent in the TDMA windows should be re-
duced to get faster update results. The time to finish
the update depends huge on the error rate. The more
errors, the more packets have to be sent. But with
growing number of sensor devices the TDMA phase
has the most impact on the finishing time. If we use
again a small error rate of 1% different update times
could be observed. The best case with regard of com-
pletion time are errors that are recognized immedi-
ately. With 3 additional sent packets, 273 in total, the
TDMA/ACK phase length would be the same – still
under the best case assumption. Since the last round
is incomplete and if all 3 packets are received without
errors the last TDMA phase is not started, leading to
no additional time cost for the update process. The
worst case on the other hand is entirely different. If
an error occurs directly after the ACK phase, the com-
plete packet round is useless and therefore, all packets
are lost. As a result only 3 errors would cost another
3 additional TDMA rounds. While only one device is
involved, only the additional 15 packets sent are rele-
vant for the execution time of the update. With the ex-
ample of 1000 Devices, 3 more TDMA phases would
mean: 99 · 100ms · 3 = 29,7s more time to finish the
update for all devices. Thus, the exact time/place of
the errors has a huge impact on the completion time
of the update. Furthermore, with more devices an er-
ror becomes more and more impactful regarding the
completion time.
6 EXPERIMENTS
This section contains experiments we made with our
available hardware. Not all introduced update proto-
cols contain an evaluation of their methods on a real
hardware environment, therefore we specifically want
to show our experiments we made. For all tests of
the update process we considered all available nodes
which need an update are in very short distance to the
access point, i.e. max distance was 1m in our test
environment. The most important metric to measure
quality of an update process in our scenario, i. e. the
development of new software for sensor networks, is
the completion time. Another top priority goal is re-
liability. All devices must be updated completely and
without errors. The energy consumption in this case
has a lower priority, but nonetheless is always impor-
tant in wireless sensor networks. Otherwise the bat-
tery must be replaced often and therefore most bene-
fits of an update process, e.g., fast and simple testing
of new code would be lost.
Calculated best case results for updates are shown in
Figure 5. The x-achsis (bottom) shows the number of
devices used whereas on the y-achsis (left side) the
time to update this number of devices is shown. The
diagram is valid for an update size of 27KB.
The fixed parameters update process has an ac-
knowledgement rate of 5. This means that every 5
SENSORNETS 2018 - 7th International Conference on Sensor Networks
26

Figure 5: Update duration with different number of devices.
data packets there is a time window where all watches
can send its ack packet. Since the number of ack
phases can be reduced, if the radio channel is good
and an error is not very likely we used a different ap-
proach for the ack phase. The AIMD and AIAD vari-
ant introduce easy mechanisms to react flexible to the
current radio channel and adapt the ack rate. AIMD
starts at the same ack rate and from there on the algo-
rithm decides whether to increase or decrease the ack
rate. Discovery phase was set to 7 seconds during all
experiments. This was sufficient for our number of
available sensor nodes, but must be adjusted accord-
ingly if more nodes are updated simultaneously. The
acceleration factor between different update modes
(TI 1:1, fixed, AIMD) is shown in Figure 6. Since the
TI update does only allow a 1:1 update, the 1:n update
process is obviously faster. The factor does increase
with growing number of sensor nodes but is kind of
limited. This is due to the acknowledgement phase
of the update protocol. As shown before in 5.3 the
ack phase becomes the bottleneck of the update pro-
cess since every ack round needs significantly more
time than sending the 5 data packets in a row. If the
AIMD and/or AIAD implementation is used and the
quality of the radio channel is good, the ACK phase
does not trigger as often as before, thus saves a lot
of time. These diagrams always show the best case,
which means that no error occurs during the complete
update time, hence are at this time only theoretical
values. The experimental results, which will be pre-
sented in the next section will indicate how likely it is
to reach these values.
6.1 Results – Static Acknowledgement
Rate
Table 3 shows some actual results from experiments
we made. These first results were executed for all
nodes within a small area and equipped with the fixed
parameters software. Onehundred of each test runs,
i.e. in total 500 update runs were executed with dif-
ferent amount of sensor nodes. The table shows the
Figure 6: Acceleration between the different update modes.
number of devices we used for one update run (up
to 25), the time the experimental worst case run
was longer than the best case calculation and the
average and worst case PER (packet error rate). The
complete column, i.e. the rate of successful updates
gives an overview of how many of these firmware
updates were done completly with no errors, meaning
a runnable new software is stored in flash memory.
PER is the packet error rate which indicates the chan-
nelquality between access point and watches during
the software update. These experimental results show,
Table 3: Measurements – static variant.
#devices WC-BC complete avg.PER max.PER
5 0.6s 99.2% 0.12% 1.09%
10 2.5s 99.8% 0.45% 3.75%
15 3.0s 99.1% 0.66% 4.69%
20 4.2s 99.8% 1.23% 7.76%
25 7.7s 99.6% 2.92% 9.72%
that completion rate does not correlate with number
of nodes which are updated. Through all test runs the
completion rate was approximately the same with no
spike in either one direction. In other words the mech-
anism does not become unreliable with more sensor
nodes and hence, is able to scale with the problem
size. The simple update protocol has a dependabil-
ity over 99%. In the current implementation an er-
ror can occur in the last data round, the acknowledge-
ment gets lost and therefore the update device can not
finish the run. A more sophisticated, explicit error
handling like a two-way communication between the
update device and the access point during or at the
end of the update process could increase the percent-
age further. When both devices expect a validation
packet the error is recognized for sure, therefore an
explicit handling for this case could be created. Since
in all experiments nodes where in a very dense forma-
tion, i.e. the average distance between the different
nodes was about 1cm, the PER does correlate with
the number of nodes. This leads to the assumption
that there is possible interference between the indi-
vidual sensor nodes, which leads to corrupted pack-
Fast and Reliable Update Protocols in WSNs During Software Development, Testing and Deployment
27

ets. The power consumption does increase over time
since more CPU and radio activity is needed. The cal-
culation results shown in 5 for more devices will most
likely not be reached since average PER is not near 0,
but does vary between 0% and 3% during different
update runs. The time to complete the update on all
watches goes up with the PER. As long as the number
of devices is 10 or lower the TDMA has no influence
on how long the update needs, as shown in the previ-
ous section in 5.3. Time increases only due to packets
which are sent again. In all other cases time increases
not only by sending data packets again, but also with
the additional time spent in the TDMA window. Such
a behaviour was noticed in our experiments between
20 and 25 update nodes. In both specific worst cases
the PER was high, but the actual completion time and
its difference to the best case was significantly higher
with 25 devices compared to 20 devices. The explana-
tion for this is the acknowledgement phase. For every
error that results in an additional ack window the up-
date time increases by 200ms with 25 devices instead
of 100ms with 20 devices. This also means, that for a
huge amount of nodes an error is much more impact-
ful than for a small amount of devices.
Another characteristic behaviour of the update proto-
col is based on the statically fixed acknowledgement
state (in this specific case after every 5 data packets).
A packet error can increase the amount of packets
needed to be sent significantly and therefore the com-
pletion time for the update. This happens if an error
occurred directly after the acknowledgement phase
and is only detected in the next phase. For this easy
protocol it is not possible to detect this error otherwise
than during the acknowledgement phase.
6.2 Results – AIMD & AIAD
The more sophisticated approach to get acknowledge-
ment packets is to react to the current quality of the ra-
dio channel. Techniques used by our protocol to adapt
are the AIMD and AIAD mechanisms. The initializa-
tion process and the message types are the same as
before. Only difference to the previous mechanism is
the rate at which the watches transmit their acknowl-
edgement information. The acknowledgement rate
starts again at 5, which means after 5 data packets the
first TDMA is initialized. After this first ack phase the
access point adjusts the time for the next ack round.
All other messages, timings and states are valid again.
The results of these 150 (75 for each variant) update
test runs with 25 sensor devices are shown in Table 4.
The best case time calculation for both the AIMD
and AIAD mechanism is 38 seconds. This means that
every single packet is transmitted without an error.
Table 4: Measurements – AIMD/AIAD variant.
avg.PER avg.T min.T avg.#dataPackets
AIMD 1.49 43.6 38.4 287.75
AIAD 1.32 41.9 38.1 295.57
This includes both data packets and ack packets. A
non received positive ack, meaning an ack that would
confirm that no error occurred is handled as an error.
This minimal time can be reached by the update pro-
cess as shown in Table 4, but the experimental evalu-
ated average case is clearly higher. The average case
still shows that the quality of the radio channel is suf-
ficient to reach better completion times than the nor-
mal static mechanism. The best case of the first ap-
proach lies with 45 seconds higher than the average
case of both the AIMD and AIAD protocols. How-
ever, with experiments evaluated we can show that the
quality of the radio channel can go low enough that
the update execution time is longer than with the static
mechanism. The worst case execution time of the
AIMD protocol is 55.9 seconds and with the AIAD
57.9 seconds. The worst case of the static method
is with 52.2 seconds lower than both the AIMD and
AIAD protocols. If a short, random error occurred
than acks are not needed often, but if an error occurred
and is detected rather late or the error is due to some
radio interference and stays in the system a more of-
ten TDMA phase would be needed. These algorithms
have a delay to react to both error cases and because
of that it can slow down the complete update process.
The comparison between AIMD and AIAD is simi-
lar. Since the multiplicative decrease mechanism can
react faster to errors which remain in the system, the
worst case execution time with a high PER is shorter
than the additive decrease mechanism. But if one ran-
dom error occurred, the AIMD protocol needs a long
time to recover before it is at the same ack rate as be-
fore the error, meaning it loses time compared to an
additive decrease mechanism. The AIAD can react
to such random errors much better. As shown in the
results, most of the time the quality of the radio chan-
nel is good enough to use the AIAD algorithm to get
faster updates than AIMD. But as seen in Table 4 the
AIAD needs in average more packets until the update
is complete. However, as explained in section 5.3 the
TDMA/ACK phase is the update state where most of
the time is spent. The number of data packets is not
the crucial part of the completion time. Since both
the flexible ack mechanisms are faster than the previ-
ous one and the AIAD is faster than the AIMD, we
learned that in general and over a lot of update runs
the AIAD method gives the best results in terms of
completion time and as previous explained this is the
most important metric for the presented update sce-
nario. The power consumption between the different
SENSORNETS 2018 - 7th International Conference on Sensor Networks
28

protocols can be compared based on the average re-
sults shown in Table 4. The interesting part about
the results is that the AIAD needs more radio trans-
mission overall. Since more packets are sent dur-
ing an average AIAD update run, the devices must
be more often in RX mode. This results in higher
power consumption for each sensor node. The LPM
and radio-idle power consumption is lower than with
AIMD as a result of the lower execution time of the
update. The formula shown in 5.2 is now not exact
enough to calculate the difference between the indi-
vidual update mechanisms regarding the active CPU
time. The active time with AIAD is still higher than
in the AIMD process (in 5.2 this would be differently
computed). The more packets are received the more
the CPU is active. To calculate the exact differences
between each update protocol a more specific CPU
active formula would be needed. Since the power
consumption was not the most important goal in the
development, the power consumption is not signifi-
cantly higher than in the static variant and the number
of update runs should be sufficient for the software
development, such exact computations were not done.
7 CONCLUSION & FURTHER
WORK
In this paper, we present a fast, reliable but still sim-
ple update mechanism plus first improvements and
their evaluation. Such an update protocol shows an
easy way to update a large amount of sensor nodes
simultaneously while keeping its effort manageable.
This approach could be used with a variety of differ-
ent hardware. During the development of software for
the sensor network, the co-development of a wireless
updater should be top priority since the benefit from
such an update process is huge. The easy possibility
to update all currently needed nodes at the same time
significantly decreases the amount of time needed to
reprogram all sensor nodes and therefore, it is easy to
test new code very fast. An exactly shared time based
protocol is much less complex than update mecha-
nisms that come with multiple senders and/or multi-
hop concepts. Calculations of this protocol shows that
the update can be executed multiple times, the power
consumptions is not problematic. The execution time
is much smaller than in a 1:1 update/flash scenario
and its scalability means it is useable with any amount
of nodes, whether a small or a large number is used.
Some improvements to the update protocol could be
done by analyzing the radio channel so the ack phase
frequency is reduced. Another possibility to improve
the update is not only to make the ACK phase flexi-
ble, but also the size, i.e. the payload, of the packets.
With a good radio channel and a 1.5 times as large
packet size, the TDMA frequence would be reduced
by this factor. This would result in higher throughput
which leads to an even smaller execution time for the
update. It would be interesting to compare some ex-
isting update protocols with our developed solution.
Especially those mechanisms, which did not provide
a real implementation. We plan to implement these
already developed update ideas on our hardware plat-
form to get experiment results from these implemen-
tations.
ACKNOWLEDGEMENTS
This work was supported by the research cluster
for Robotics, Algorithms, Communication and Smart
Grid (RAKS) of the OTH Regensburg. Further infor-
mation under www.raks-oth.de
This work was also supported by the Regensburg
Center of Energy and Resources (RCER) and the
Technology- and Science Network Oberpfalz (TWO).
Further information under www.rcer.de
REFERENCES
DataSheet Lithium Manganese Dioxide Battery CR2032.
accessed 15.03.2017.
Akyildiz, I., Su, W., Sankarasubramaniam, Y., and Cayirci,
E. (2002). A survey on sensor networks. IEEE Com-
munications Magazine.
Altmann, M., Schlegl, P., and Volbert, K. (2016). A low-
power wireless system for energy consumption analy-
sis at mains sockets. EURASIP - Embedded Systems.
Brown, S. and Sreenan, C. J. (2013). Software updating
in wireless sensor networks: A asurvey and lacunae.
Journal of Sensor and Actuator Networks, ISSN 2224-
2708. www.mdpi.com/journal/jsan/.
Chong, C.-Y. and Kumar, S. (2003). Sensor networks: evo-
lution, opportunities, and challenges. Proceedings of
the IEEE.
Edmonds, J. (2012). On the competitiveness of aimd-tcp
within a general network. Theoretical Computer Sci-
ence.
Hui, J. W. and Culler, D. (2004). The Dynamic Behavior of
a Data Dissemination Protocol for Network Program-
ming at scale.
Jacobson, V. (1988). Congestion avoidance and control.
SIGCOMM Comput. Commun. Rev., 18(4):314–329.
Karp, R., Koutsoupias, E., Papadimitriou, C., and Shenker,
S. (2000). Optimization problems in congestion con-
trol. Proceedings of FOCS00, IEEE Computer Soci-
ety.
Fast and Reliable Update Protocols in WSNs During Software Development, Testing and Deployment
29

Kenner, S., Thaler, R., Kucera, M., Volbert, K., and Waas,
T. (2016). Comparison of Smart Grid architectures for
monitoring and analyzing power grid data via Modbus
and REST. EURASIP - Embedded Systems.
Kenner, S. and Volbert, K. (2016). A low-power, tricky
and very easy to use sensor network gateway archi-
tecture with application example. 10th International
Conference on Sensor Technologies and Applications
(SENSORCOMM’16).
Levis, P., Patel, N., Culler, D., and Shenker, S. (2004).
Trickle: A Self-Regulating Algorithm for Code Prop-
agation and Maintenance in Wireless Sensor Net-
works.
Lukovszki, T., Schindelhauer, C., and Volbert, K. (2006).
Resource Efficient Maintenance of Wireless Network
Topologies. Journal of Universal Computer Science
(J.UCS’06). 12(9):1292–1311.
Meyer auf der Heide, F., Schindelhauer, C., Volbert, K., and
Gr
¨
unewald, M. (2004). Congestion, dilation, and en-
ergy in radio networks. Theory of Computing Systems
(TOCS’04).
Rickenbach, P. and Wattenhofer, R. (2008). Decoding Code
on a Sensor Node. 4th International Conference on
Distributed Computing in Sensor Systems (DCOSS).
Schindelhauer, C., Volbert, K., and Ziegler, M. (2007). Ge-
ometric Spanners with Applications in Wireless Net-
works. Computational Geometry: Theory and Appli-
cations (CGTA’07). 36(3):197–214.
Schlegl, P., Robatzek, M., Kucera, M., Volbert, K., and
Waas, T. (2014). Performance Analysis of Mobile
Radio for Automatic Control in Smart Grids. Sec-
ond International Conference on Advances in Com-
puting, Communication and Information Technology
(CCIT’14).
Sinha, A. and Chandrakasan, A. (2001). Dynamic power
management in wireless sensor networks. IEEE De-
sign & Test of Computers.
Sivrikaya, F. and Yener, B. (2004). Time synchronization in
sensor networks: a survey. IEEE Network.
Stathopoulos, T., Heidemann, J., and Estrin, D. (2003). A
Remote Code Update Mechanism for Wireless Sensor
Networks. Center for Embedded Networked Sensing.
Sternecker, C. (2012). Reprogrammierungstechniken fuer
drahtlose Sensornetzwerke. Seminar Sensorknoten -
Betrieb, Netze und Anwendungen.
Stolikj, M., Cuijpers, P. J. L., and Lukkien, J. J. (2012).
Efficient reprogramming of wireless sensor networks
using incremental updates and data compression. De-
partment of Mathematics and Computer Science Sys-
tem Architeture and Networking Group.
TI (2013a). CC430 Family - User’s Guide. accessed
15.03.2017.
TI (2013b). MSP430 SoC With RF Core. accessed
15.03.2017.
TI (2015). MSP430F5510, MSP430F550x Mixed-Signal
Microcontrollers. accessed 15.03.2017.
TI (2017). MSP Gang Programmer (MSP-GANG). ac-
cessed 20.06.2017.
Wagn, Q., Zhu, Y., and Cheng, L. (2006). Reprogram-
ming Wireless Sensor Networks: Challenges and Ap-
proaches. IEEE Network.
SENSORNETS 2018 - 7th International Conference on Sensor Networks
30
