
Constant-time Extraction of Statistical Moments
for Object Detection Procedures
Przemysław Kle¸sk and Aneta Bera
Faculty of Computer Science and Information Technology, West Pomeranian University of Technology,
ul.
˙
Zołnierska 49, 71-210 Szczecin, Poland
Keywords:
Object Detection, Constant-time Feature Extraction, Normalized Central Statistical Moments, Sets of Integral
Images.
Abstract:
We propose a computational technique, backed with special integral images, allowing for constant-time ex-
traction of statistical moments within detection procedures. The moments under study are formulated in their
normalized central version. The set of proposed integral images needs to be prepared prior to the detection
procedure. Its size grows quadratically with the imposed maximum order of moments, but the time invested
in the preparation is amortized sufficiently well at the scanning stage. We give exact counts of the number
of operations involved in extraction according to the proposed algorithm. The main idea is coupled with an
auxiliary technique for detection window partitioning. In the experimental part, we demonstrate two examples
of detection tasks. Detectors have been trained on the proposed features by the RealBoost learning algorithm
and achieve both: satisfactory time performance and accuracy.
1 INTRODUCTION
Dense detection procedures are computationally ex-
pensive and therefore require fast algorithms for fea-
ture extraction. If a detector is supposed to analyze,
for example, 10
5
windows per image for given set-
tings (resolution, number of scales, etc.) then it is
typically expected to analyze a single window below
the time of 10
−5
s = 10µs. If a strict real-time per-
formance is required then the computational expecta-
tions can be higher even by two orders of magnitude.
Nowadays, the most common approaches for fea-
ture extraction such as Haar-like features (Viola and
Jones, 2001; Viola and Jones, 2004) or HOG descrip-
tors (Dalal and Triggs, 2005; Said et al., 2011) owe
their popularity to the computational support of inte-
gral images. In the case of Haar-like features, the in-
tegral image is a simple cumulant of pixel intensities.
In the case of HOG desciptor, one can prepare a set of
integral images, each cumulating so-called votes for
the gradients within particular angular sections.
In either case, once the cumulants have been pre-
pared, one can take advantage of them during the de-
tection procedure and have a fast — constant-time —
method for extraction of each feature. It is achieved
by calculating growths of integral images in a man-
ner analogical to the calculus, where definite inte-
grals over rectangular domains can be calculated via
growths of so called primitive functions (a.k.a. anti-
derivatives). For two-dimensional domains a growth
operation involves two subtractions and one addition.
We dare noticing that apart from the mentioned
features (Haar, HOG), other techniques based on the
constant-time approach are rather scarce. Frequently,
when more advanced features are needed for detec-
tion purposes, the researchers perform some sort of
preliminary image segmentation and substantially re-
duce the number of candidate windows. This allows
to carry out more demandingcomputations, often pro-
portional to the number of pixels in each window
(Terrillon et al., 2000; Noh et al., 2017).
In this paper we consider statistical moments as
features for machine learning and detection. Various
applications of statistical moments can be met in lit-
erature, many of them in the field of optical and hand-
written character recognition, see e.g. (Abandah and
Anssari, 2009; Boveiri, 2010). The main contribu-
tion of this paper is a computational technique that
makes statistical moments ‘fit’ detection procedures
and their time regime (without image segmentation).
The technique applies a set of special integral images
that can be regarded as inner products between the
image function and suitable power terms. Extraction
of a single feature becomes independent of the num-
Kl˛esk, P. and Bera, A.
Constant-time Extraction of Statistical Moments for Object Detection Procedures.
DOI: 10.5220/0006550000490059
In Proceedings of the 7th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2018), pages 49-59
ISBN: 978-989-758-276-9
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
49

ber of pixels in the detection window and thereby is
an O(1) calculation. We derive a suitable general for-
mula for an arbitrary imposed order of moments and
analyze the number of operations involved. The ex-
perimental part demonstrates the applicability of the
proposed technique.
We explain that the main intention behind our
contribution is to extend the existing repertoire
of constant-time algorithms for feature extraction
backed with integral images. As mentioned before,
that reportoire includes nowadays mainly Haar-like
features and HOG descriptor. In this paper we demon-
strate that statistical moments can be incorporated
into that reportoire as well. We would like to em-
phasize that our intention is not to present new de-
tectors that would be competetive against more re-
cent approaches using convolutional neural networks.
Please note that despite highly accurate results and the
ability to handle multiple classes, CNNs (or R-CNNs)
include in their architecture feature extraction stages
that are dependent on the number of pixels in each
analyzed image fragment. Therefore, constant-time
approaches are better from the algorithmic and com-
putational point of view. Time-efficient applications
of CNNs in the field of object detection require pre-
screening to preselect candidate windows and also
strongly parallel architectures at disposal (e.g. GPU
/ CUDA). That is not the scenario we consider in this
paper.
2 NORMALIZED CENTRAL
STATISTICAL MOMENTS
We start by reminding the mathematical formulation
of continuous version of statistical moments. Let f
denote any probability density function. A central
statistical moment of order (p,q) is defined as follows
with respect to f:
µ
p,q
=
Z
∞
−∞
Z
∞
−∞
x− µ
1,0
p
y− µ
0,1
q
f(x,y)dxdy,
(1)
where p + q > 2; and the moments of order one are
defined as
µ
1,0
=
Z
∞
−∞
Z
∞
−∞
xf(x,y)dxdy, (2)
µ
0,1
=
Z
∞
−∞
Z
∞
−∞
yf(x,y)dxdy. (3)
For image processing tasks, one typically con-
siders zeroth order approximations of statistical mo-
ments. The integrals become replaced with sums
weighted by pixel intensities rather than a density
function. Moreover, in detection tasks, it is useful to
define moments in a form independent of the detec-
tion window size and position. Therefore, we shall
define normalized central moments.
Let i represent an image function. Suppose a rect-
angular detection window spans from a point (x
1
,y
1
)
to (x
2
,y
2
). Then, its normalized central statistical mo-
ments can be calculated as follows:
µ
p,q
x
1
,y
1
x
2
,y
2
=
∑
x
1
6x6x
2
∑
y
1
6y6y
2
x− x
1
x
2
− x
1
− µ
1,0
x
1
,y
1
x
2
,y
2
p
·
y− y
1
y
2
− y
1
− µ
0,1
x
1
,y
1
x
2
,y
2
q
i(x,y)
D
, (4)
where D =
∑
x
1
6x6x
2
∑
y
1
6y6y
2
i(x,y), and the mo-
ments of order one are
µ
1,0
x
1
,y
1
x
2
,y
2
=
∑
x
1
6x6x
2
∑
y
1
6y6y
2
x− x
1
x
2
− x
1
·
i(x,y)
D
, (5)
µ
0,1
x
1
,y
1
x
2
,y
2
=
∑
x
1
6x6x
2
∑
y
1
6y6y
2
y− y
1
y
2
− y
1
·
i(x,y)
D
. (6)
We remark that the moments of order one can be re-
garded as estimates of expected values for x and y
variables. The moments of higher orders are called
central due to the subtractions of those expected val-
ues in (4). The fact that moments are normalized per-
tains to the presence of terms (x − x
1
)/(x
2
− x
1
) and
(y− y
1
)/(y
2
− y
1
). This maps the variability of coor-
dinates to the [0,1] interval and introduces invariance
to scale of the detection window. It can be checked
then that the moments themselves take values in the
[−1,1] interval.
Let us remind the interpretation of the few first
moment orders. The zero-order moment µ
0,0
is obvi-
ously a unity (integral over a density function). The
first-order moments µ
1,0
, µ
0,1
represent expected val-
ues (the means) variable-wise. The second-order mo-
ments µ
2,0
, µ
0,2
represent variances about the means,
whereas the moment µ
1,1
expresses the covariance.
The third-order moments µ
3,0
, µ
0,3
denote skewness
i.e. the degree of deviation from the symmetry about
the mean. The fourth-order moments µ
4,0
, µ
0,4
rep-
resent kurtosis i.e. the measure of flatness or peaked-
ness of the distribution. Obviously, moments where
neither p or q are zero carry a mixed interpretation of
the above quantities. Higher order moments are rarely
named but do exist uniquely for a given density func-
tion and are responsible for the description of finer
details. In other words, in the context of recognition
and detection tasks, every object (shape) translates
uniquely onto a series of moments and vice-versa. It
is worth remarking that the information provided by
a finite number of statistical moments may be use-
ful or not depending on the particular application.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
50
What must be understood is that the statistical infor-
mation if of different nature than the information car-
ried e.g. by the popular Haar-like features which can
be regarded as rough local contours.
3 INTEGRAL IMAGES OF
ARBITRARY ORDER AND
CONSTANT-TIME
CALCULATION OF MOMENTS
We now introduce the following general formula for
an integral image of order l + m:
ii
l,m
(x,y) =
∑
16 j6x
∑
16k6y
j
l
k
m
i( j,k). (7)
To explain the notation, we remark that the (l,m) pair
of indexes is now used rather than (p, q), because to
calculate a moment of order (p,q) later on we shall
apply the binomial expansion and therefore a double
summation over new indexes e.g. (l,m).
Suppose n represents the imposed maximum order
of moments variable-wise. Then, the set of all integral
images that have to be prepared prior to the detection
procedure can be denoted as
ii
l,m
=
ii
l,m
: 0 6 l 6 n, 0 6 m 6 n
. (8)
Obviously the size of that set is (n+ 1)
2
. Is also worth
remarking that every integral image within
ii
l,m
can
be calculated by induction in linear-time with respect
to the total number of pixels in the input image. Note,
in particular, that ii
0,0
corresponds to the elementary
integral image, such as the one employed in (Viola
and Jones, 2001; Viola and Jones, 2004).
For notational convenience, let us now define the
growth operator ∆. It can be applied to any integral
image and any image window, as follows:
∆
x
1
,y
1
x
2
,y
2
(ii) = ii(x
2
,y
2
) − ii(x
1
− 1, y
2
)
− ii(x
2
,y
1
− 1) + ii(x
1
− 1, y
1
− 1), (9)
where ii stands for some integral image from set (8).
The following proposition constitutes the main
contribution of the paper.
Proposition 1. Let n > 0 denote the imposed max-
imum order of moments variable-wise. Suppose the
set of integral images
ii
l,m
, 0 6 l, m 6 n, has been
calculated prior to the detection procedure. Then, for
any rectangle in the image, spanning from (x
1
,y
1
) to
(x
2
,y
2
), each of its normalized central statistical mo-
ments can be extracted in constant time — O(1) —
regardless of the number of pixels, as follows:
µ
p,q
x
1
,y
1
x
2
,y
2
= 1
.
∆
x
1
,y
1
x
2
,y
2
(ii
0,0
)(x
2
− x
1
)
p
(y
2
− y
1
)
q
·
p
∑
l=0
p
l
−x
1
− µ
1,0
x
1
,y
1
x
2
,y
2
(x
2
− x
1
)
p−l
·
q
∑
m=0
q
m
−y
1
− µ
0,1
x
1
,y
1
x
2
,y
2
(y
2
− y
1
)
q−m
· ∆
x
1
,y
1
x
2
,y
2
(ii
l,m
),
(10)
where p+ q > 2.
The proof is a straightforward derivation based on
binomial expansions and we move it to the appendix.
Note that formula (10) does not dependent on the
number of pixels but does scale with indexes p, q and
the number of operations is roughly proportional to
p· q. An accurate count of the number of operations
involved can be given after Algorithm 1 is presented.
It encapsulates Proposition 1 in a more algorithmic
style.
In the algorithm we omit the subscripts related
to the rectangle coordinates for readability. Apart
from parameters already defined, we introduce an ad-
ditional argument to the procedure — L. It is meant to
represent a lookup table storing binomial coefficients.
Such a table can be prepared prior to the detection
procedure. Let L[n,k] =
n
k
.
Algorithm 1: Constant-time calculation of a statistical mo-
ment of order (p,q) under detection procedure.
procedure SM(p, q, x
1
, y
1
, x
2
, y
2
,
ii
l,m
,
µ
1,0
, µ
0,1
, D, L)
a
x
:= −x
1
− µ
1,0
· (x
2
− x
1
)
a
y
:= −y
1
− µ
0,1
· (y
2
− y
1
)
µ
p,q
:= 0.0
for l := 0,. . ., p do
s := 0.0
for m := 0,...,q do
s := s+ L[q,m] · a
q−m
y
· ∆
x
1
,y
1
x
2
,y
2
(ii
l,m
)
end for
µ
p,q
:= µ
p,q
+ L[p, l] · a
p−l
x
· s
end for
µ
p,q
:= µ
p,q
(D(x
2
− x
1
)
p
(y
2
− y
1
)
q
)
return µ
p,q
end procedure
One detail requires an explanation. It is assumed
that moments of order one µ
1,0
, µ
0,1
and the constant
D have been precalculated and can be passed as argu-
ments to the procedure. Note that D can be obtained
using the growth on the zeroth order integral image:
D = ∆
x
1
,y
1
x
2
,y
2
(ii
0,0
); whereas moments of order one can
Constant-time Extraction of Statistical Moments for Object Detection Procedures
51

be obtained by the following initial calls:
µ
1,0
= SM(1,0,x
1
,y
1
,x
2
,y
2
,
ii
l,m
,0.0,0.0,D,L),
µ
0,1
= SM(0,1,x
1
,y
1
,x
2
,y
2
,
ii
l,m
,0.0,0.0,D,L).
Please note the 0.0 values passed as the eigth and
nineth argument in these particular calls.
Let us distinguish three kinds of operations: ad-
ditions or subtractions — denoted further as ⊕, mul-
tiplications or divisions — ⊙, and powers — ⊗. It
can be checked by a careful count that the number of
operations involved in Algorithm 1 is as follows:
⊕: (p+ 1)(4q + 5) + 8,
⊙: 2(p+ 1)(q+ 2) + 4,
⊗: (p+ 1)(q + 2) + 2. (11)
We remark that 3 additions/subtractions were in-
cluded in the count for each invocation of the growth
operator ∆. If one neglects for a while the kind of
an operation then the total number of operations be-
comes:
(p+ 1)(7q+ 11) + 14. (12)
Note also that for a fine-tuned implementation the or-
der of loops in Algorithm 1 could be dynamically
switched when q > p to make the number of opera-
tions beneficial for that case.
To provide the reader with a specific quantita-
tive example, consider a small image fragment of
size 48× 48 containing 2304 pixels. Looking at for-
mula (4), one can see that the definition-sytle calcula-
tions would approximately require 8 operations per
pixel, that is 2304 · 8 ≈ 1.8 · 10
4
. In contrast, the
constant-time calculations from Proposition 1 repre-
sented by Algorithm 1 require e.g.: 89, 290, 905 op-
erations, respectively for p = q = 2,5, 10.
4 PARTITIONING OF
DETECTION WINDOW
One of intentions behind Viola and Jones’ idea was
to generate a great multitude of features, e.g. of order
10
4
or 10
5
. The features themselves might be simple,
but by having a great number of them at disposal a
learning algorithm (e.g. boosting) can usually select a
subset of relevant features that in combination form a
good description of target objects. That is why when
generating Haar-like features according to a certain
parameterization (templates, scales, grid of anchor-
ing points) one typically does not care about lack of
orthogonality or partial redundancy of information in
the features (correlations).
Until now we have introduced only one parameter
n = 0,1,... (the maximum order for the statistical mo-
ments) which translates directly onto the number of
moments that can be extracted. Even for fairly large
but reasonable values of n, we can only have (n+ 1)
2
features. For example, n = 10 yields 121 features.
In this section we introduce another parameter
N = 1, 2,... that will be responsible for the partition-
ing of the detection window. Owing to the partition-
ing one shall be able to generate richer and more nu-
merous feature spaces.
The proposed partitioning scheme works as fol-
lows. Suppose the detection window is of resolution
w
x
× w
y
during the current scan. The window be-
comes partitioned into a regular grid of N × N rectan-
gular pieces. We calculate lengths s
x
, s
y
of the pieces,
taken as integer parts of division by N, and memorize
the remainders r
x
, r
y
:
s
x
= ⌊w
x
/N⌋, r
x
= w
x
mod N;
s
y
= ⌊w
y
/N⌋, r
y
= w
x
mod N.
(13)
The remainders are needed to center the grid of rect-
angles within the window (with at most 1 pixel devi-
ation). Instead of using (x
1
,y
1
) as the top-left starting
point of the grid, we shall be using its corrected loca-
tion, namely:
x
′
1
= x
1
+ ⌊r
x
/2⌋,
y
′
1
= y
1
+ ⌊r
y
/2⌋. (14)
Now, the set of features can be formed by statis-
tical moments extracted from any subset of pieces in
the grid under condition that they form a single rect-
angle. In other words we shall consider all possible
rectangles spanned between any two pieces (inclu-
sively) of the grid.
Such rectangles can be represented, for exam-
ple, by quadruples ( j
1
,k
1
, j
2
,k
2
) indicating indexes
of the corner pieces. Following this notation, pos-
sible rectangles can span from (x
′
1
+ j
1
s
x
,y
′
1
+ k
1
s
y
)
to (x
′
1
+ j
2
s
x
,y
′
1
+ k
2
s
y
), where 0 6 j
1
,k
1
< N and
j
1
< j
2
6 N, k
1
< k
2
6 N. Fig. 1 illustrates the win-
dow partitioning technique.
φ
·,·,1,1,5,2
φ
·,·,3,2,7,7
φ
·,·,4,1,6,3
φ
·,·,3,5,4,6
Figure 1: Detection window partitioning for N = 7 with
examples of rectangles from which statistical moments can
be extracted (marked in gray).
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
52

We now formally define the set of features as fol-
lows:
φ
p,q, j
1
,k
1
, j
2
,k
2
=
n
µ
p,q
x
′
1
+ j
1
s
x
,y
′
1
+k
1
s
y
x
′
1
+ j
2
s
x
,y
′
1
+k
2
s
y
: 0 6 p,q 6 n,
06 j
1
<N, j
1
< j
2
6N, 06k
1
<N, k
1
<k
2
6N
o
,
where each feature φ is described by six indexes. It is
easy to check that the size of the features set is
(n+ 1)
2
N
2
(N + 1)
2
/4. (15)
For example, by imposing n = 3, N = 7 one generates
12544 features.
5 DETECTION EXPERIMENTS
In experiments we apply RealBoost (RB) as the
main learning algorithm, producing ensembles of
weak classifiers with real-valued responses. Vari-
ous choices are possible as regards the selection of
weak classifiers (stumps, shallow decision trees, etc.).
We have decided for a variant akin to stumps called
RealBost+Bins (RB+B) (Rasolzadeh et al., 2006). In
this variant, each weak classifier is based on a single
feature selected via minimization of exponential er-
ror. The range of a feature
1
is divided into a certain
number of bins (equally wide) that store classifier’s
responses calculated as halves of the logit transform:
1
2
log
b
P(y = +1|x)
.
b
P(y = −1|x)
,
where probabilities are estimated using examples’
weights from the current round of boosting. There-
fore, the weak classifiers work by means of piecewise
constant approximations of conditional distributions
of classes. For more information on boosting we ad-
dress the reader to literature, in particular to (Schapire
and Singer, 1999; Friedman et al., 2000; Rasolzadeh
et al., 2006; Appel et al., 2013).
In the presentation of results, we shall report the
imposed sizes of ensembles (denoted by T) and bin
counts (denoted by B) to describe classifiers com-
plexity. As regards accuracy results, we shall report
the standard measures such as: sensitivity, FAR (false
alarm rate), AUC
2
, and an overall accuracy.
It is worth mentioning that we apply Jaccard in-
dex
3
in two places: (1) to postprocess detected win-
dows and (2) to check positive indications against
1
Once the outliers are removed. In our case 1% of out-
liers on each side of an axis has been removed.
2
area under Receiver Operating Characteristics (ROC)
curve
3
ratio of intersection and union areas
the ground truth. Typically, a trained detector pro-
duces a cluster of many positivewindows around each
target. At the postprocessing stage, we group such
clusters into single indications using Jaccard index.
This means that at each step (within a postprocess-
ing loop) two windows with the highest index become
averaged. Later, when comparing positive indications
against the ground truth, we expect each detected win-
dow to have the index of at least 0.5 (with respect to
some target position) in order to be counted as a true
positive. Otherwise, it becomes a false alarm.
All the software for the presented experiments has
been written in C# with key procedures (integral im-
ages, feature extraction, detector response) reimple-
mented for efficiency in C++ as dll libraries.
We remark that cascades of classifiers are not ap-
plied in experiments (they are out of the main focus
of this paper).
5.1 “Letter A”
For this experiment we have arranged a synthetic data
set containing capital letters from the modern English
alphabet. Pictures containing the characters of com-
puter fonts were retrieved from the dataset prepared
and presented in (de Campos et al., 2009).
(a) (b)
(c)
Figure 2: Sample images and backgrounds used to generate
the data. Positives: letter ‘A’ (a), negatives: other letters (b)
+ elements of backgrounds (c).
We have limited the subset representing the let-
ter ‘A’ to several fonts with similar characteristics and
treated it as our base for creating positive examples.
Subsets with other letters were combined in order to
prepare the base for negative examples. Fig. 2 depicts
the source graphical material used in the experiment
(examples of target objects and backgrounds). For
testing purposes, we have generated 100 synthetic im-
ages by randomly placing letters (without collisions)
over random backgrounds. Details on the experimen-
tal setup are gathered in Table 1.
Constant-time Extraction of Statistical Moments for Object Detection Procedures
53
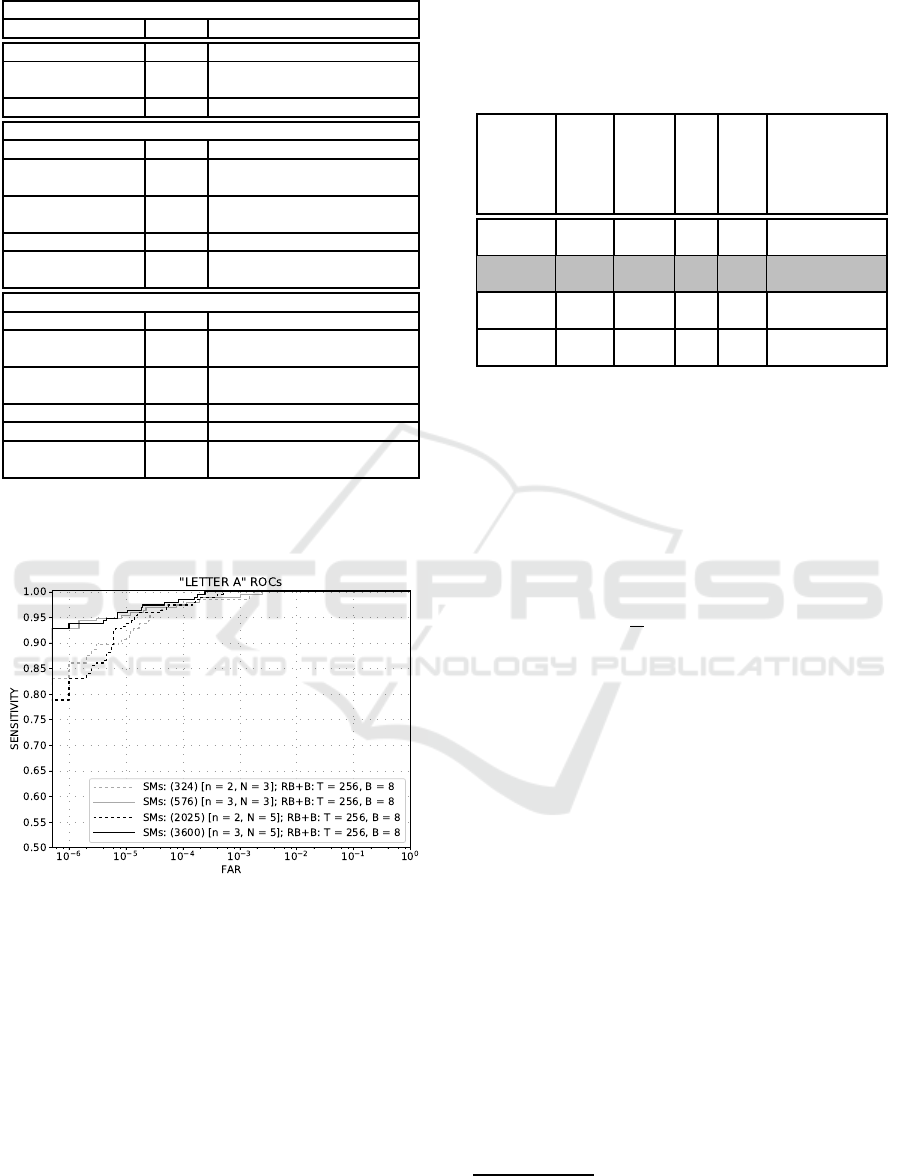
Table 1: “Letter A”: experimental setup.
train data
quantity / parameter value additional information
no. of positive examples 1000 windows with letter ‘A’
no. of negative examples 10000 windows with letters other than ‘A’
plus random samples of backgrounds
train set size 11000 positives and negatives in total
test data
no. of images 100
no. of positive examples 194 windows with letter ‘A’
(in all test images)
no. of negative examples 14035306 other windows (non-‘A’)
(in all test images)
test set size 14035500 positives and negatives in total
no. of negative examples 2000000 negative examples
for ROC plot sampled on random
detection procedure (scanning with a sliding window)
image resolution 600×480 imposed resolution
no. of detection scales 8 images scanned with 8 different
sizes of window
window growing 1.2 window widths and heights
coefficient increase by ≈ 20% per scale
smallest window size 48×48
largest window size 172×172
window jumping 0.05 window jumps equal to ≈5%
coefficient of its width and height
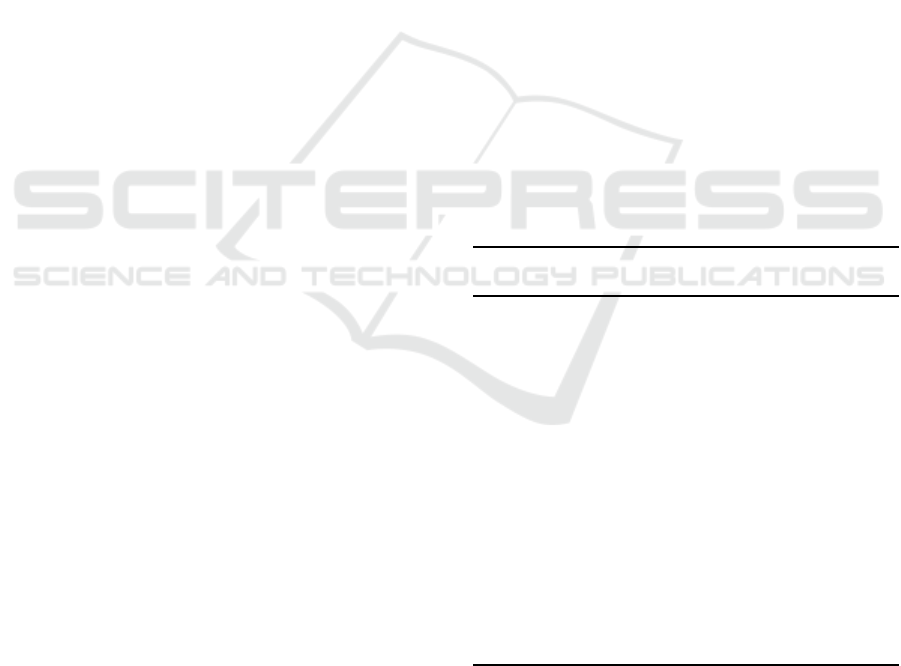
Results. We start reporting results by showing the
ROC curves in Fig. 3.
Figure 3: ROC curves for detectors of letter ‘A’ trained on
statistical moments (learning algorithm: RealBoost + bins).
The detectors associated with them have been
trained on statistical moments (SMs) obtained for
fairly small settings of the feature space parameteriza-
tion, i.e. n = 2, 3 as the maximum orders of moments,
and N = 3, 5 as the sizes of partitioning grids. To dis-
tinguish better between the curves, logarithmic scale
has been imposed on the FAR axis and the sensitiv-
ity axis range has been narrowed down. As one can
note the parameter N, controlling the grid size, turned
out to be of secondary importance in this experiment.
ROCs obtained for the higher statistical order, n = 3,
surpassed the ones for n = 2.
Table 2 reports accuracy measures obtained by
carrying out the detection procedure on 100 test im-
ages.
Table 2: “Letter A”: detection results for RB+B algorithm
(B = 8, T = 256).
SMs
description AUC
10
−5
sensitivity FAR FAR accuracy
(no. of feats.)
[n,N]
per
image
per
window
[·10
−8
]
per
window
(324) [2,3] 0.8863
186/194
≈ 0.9588
0/100
= 0.00
0.000 0.999999430016743
(576) [3,3] 0.9424
194/194
= 1.0000
0/100
= 0.00
0.000 1.000000000000000
(2025) [2,5] 0.8807
191/194
≈ 0.9845
1/100
= 0.01
7.125 0.999999715008372
(3600) [3,5] 0.9451
193/194
≈ 0.9948
1/100
= 0.01
7.125 0.999999857504186
The detector obtained for n = 3 and N = 3
achieved a perfect score (no false negetatives nor pos-
itives), but the remaining detectors also performed
very well. Overall results suggest that this data set
can be regarded as a fairly easy one. In the table,
among other measures, we report AUC
10
−
5
. It is a
normalized AUC measure obtained up to the point
10
−5
along the FAR axis. In general, one can look
at AUC
α
values, defined as
1
α
Z
α
0
s( f)d f, (16)
where s( f) represents sensitivity treated as a func-
tion of false alarm rate
4
. For example, a sequence of
AUC
10
−6
, AUC
10
−5
, AUC
10
−4
provides a good infor-
mation about the initial behaviour of the ROC curve,
which is of particular importance in detection tasks.
On the other hand, the AUC=AUC
1.0
is of little infor-
mation, when obtained detectors are comparable and
of high accuracy. Please note also that the area under
ROC can be interpreted as the average sensitivity.
In Fig. 4 we present some examples of detection
outcomes produced by the best detector. Fig. 5 depict
the only false alarm raised by the detector with set-
tings n = 3, N = 5. As one can note it represent the
letter ‘N’, a part of which was mistaken for an ‘A’.
Last but not least, in Table 3 we report the time
performance
5
registered on our computer with Intel
Xeon E5-2699 v4 CPU 2.2 GHz (22/44 cores/threads,
55 MB cache).
The results pertain to the most accurate detector
(n = 3, N = 3). The required preparation of 16 in-
tegral images (in this case) took 53ms of the over-
all time of 245ms for the whole procedure. During
4
technically, ROC is a curve, not a function
5
median results observed
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
54

(a) (b)
Figure 4: “Letter A”: examples of detections — (a) direct
outcomes with all single indications, (b) postprocessed out-
comes after grouping clusters of windows.
(a) (b)
Figure 5: “Letter A”: the single false alarm raised by the
detector for n = 3, N = 5.
Table 3: “Letter A”: time performance for a 600× 480 im-
age (parallel computations on: Intel Xeon E5-2699 v4 CPU
2.2 GHz, 22/44 cores/threads, 55 MB cache).
SMs (576) [3,3], T = 256, B = 8
quantity (or operations) time or amount
no. of analyzed windows 140355
total time of detection procedure 245ms
no. of prepared integral images 16
preparation time of all integral images 53ms
preparation time per 1 integral image 3.313ms
time per 1 window 1.746µs (amortized: 1.368µs)
no. of distinct features used by ensemble 120
time per 1 window and 1 feature 14.55ns (amortized: 11.40ns)
the procedure 140355 image windows were analyzed.
Please note that even though the learning algorithm
was given 576 features at disposal and that the num-
ber of boosting rounds was T = 256, it finally selected
to use only 120 distinct features. The average time of
analysis per a single feature was 14.55ns.
5.2 “Faces”
The learning material for this experiment consisted
of images with faces (upright position or close to it),
looked up using the Google Images search engine for
queries such as: ‘person’, ‘people’, ‘family’, ‘chil-
dren’, ‘students’, etc. The selected results translated
onto a train set containing 7258 face examples com-
ing from 3000 images. Tab. 4 presents all the details
about the experimental setup.
Table 4: “Faces”: experimental setup.
train data
quantity / parameter valueadditional information
no. of images 3000downloaded from Google Images
with faces for queries: person, people, group
of people, family, children,
sportsmen, students, etc.;
no. of images 300as above, queries: view, landscape,
without faces street, cars, etc.
no. of positive examples 7258face windows marked manually
no. of negative examples 100000 imposed quantity; examples sampled at
random positions and scales within
images without faces
train set size 107258positives and negatives in total
test data
no. of images 500queries as for train data (other images)
no. of positive examples 1000windows with faces
(in all test images)
no. of negative examples70251859 windows with faces
(in all test images)
test set size 70252859positives and negatives in total
no. of negative examples 2000000negative examples
for ROC plot sampled on random
detection procedure (scanning with a sliding window)
image height 480before detection, images scaled to the
height 480, keeping original
height : width proportion
no. of detection scales 8images scanned with 8 different
sizes of window
window growing 1.2window widths and heights increase
coefficient by ≈ 20% per scale
smallest window size 48×48faces smaller than ≈10%
of image height not to be detected
largest window size 172×172faces larger than ≈36%
of image height not to be detected
window jumping 0.05window jumps equal to ≈5%
coefficient of its width and height
Results. Again, we have applied RB+B as the learn-
ing algorithm. This time we have imposed larger en-
sembles consisting of 512 weak classifiers and we
have been experimenting with both B = 8 and B = 16
Constant-time Extraction of Statistical Moments for Object Detection Procedures
55
counts for bins. The sizes of generated features sets
ranged from 5625 to 19600. Results for the six de-
tectors that we have tested in this experiment are pre-
sented in Fig. 6 (ROC curves) and Table 5.
Figure 6: ROC curves for face detectors trained on statisti-
cal moments (learning algorithm: RealBoost + bins).
Table 5: “Faces”: detection results for RB+B algorithm
(B = 8 or B = 16).
SMs
description
AUC
10
−5
sensitivity FAR FAR accuracy
(no. of feats.)
[n,N]
per
image
per
window
[·10
−7
]
per
window
B = 8
(5625) [4,5] 0.7550
752/1000
= 0.752
58/500
= 0.116
8.26 0.999995644363969
(12544) [3,7] 0.8387
852/1000
= 0.852
82/500
= 0.164
11.7 0.999996726155925
(19600) [4,7] 0.8559
780/1000
= 0.780
49/500
= 0.098
6.97 0.999996171025842
B = 16
(5625) [4,5] 0.7862
840/1000
= 0.840
122/500
= 0.244
17.4 0.999995985982481
(12544) [3, 7] 0.8495
867/1000
= 0.867
65/500
= 0.130
9.25 0.999997181647274
(19600) [4,7] 0.8651
826/1000
= 0.826
45/500
= 0.090
6.41 0.999996882731076
Looking at accuracy measures in Table 5, one
can see that face detection is obviously a more diffi-
cult task than detection of simple geometrical patterns
(like it was the case in the previous experiment). The
best obtained face detector trained on statisitcal mo-
ments (n = 3, N = 7, B = 16) exhibits the 86.7% sen-
sitivity and 13% false alarms per image. Obviously,
results measured at the ‘windows level-of-detail’ look
more optimistically — the overall accuracyof the best
detector was approximately 99.99972%, which could
be confronted with the zero-rule classification perfor-
mance: 99.99953% for our test data.
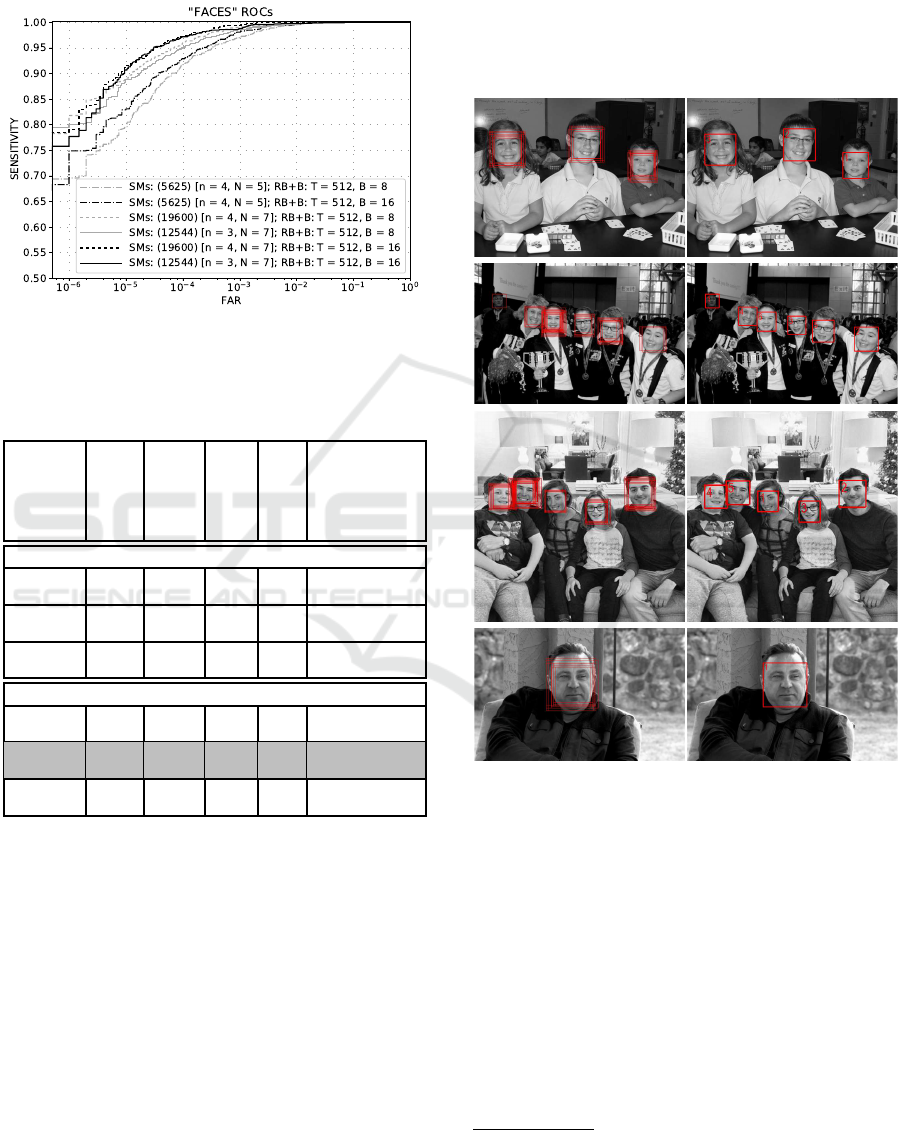
Examples of correct detections are shown in
Fig. 7, whereas Fig. 8 deptics several erroneous out-
comes with misdetections or false alarms. Vari-
ous reasons can be attributed to misdetections, e.g.:
unnatural facial expressions, lightening conditions,
blurs, non-upright face positions, glasses, fringes,
tatoos, etc. As regards false alarms, it is difficult to
notice a general rule, but some of them can be ex-
plained by bearing certain resemblance to faces.
(a) (b)
Figure 7: “Faces”: examples of correct detections by the
best among detectors trained on statistical moments (n = 3,
N = 7, B = 16) — (a) direct outcomes with all single indi-
cations, (b) postprocessed outcomes after grouping clusters
of windows.
Finally, as in the previous experiment, we report
the time performance — see details in Table 6. The
results pertain to the most accurate detector (n = 3,
N = 7, B = 16). It is worth to remark that in this
experiment the learning algorithm ‘decided’ to select
and use more
6
distinct features, namely: 484. This
led to a longer overall time of the procedure (722ms
for 150849 analyzed windows), but the average time
of computations per feature was roughly at the same
level: 9.89ns.
6
relatively to the former experiment
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
56
(a) (b)
Figure 8: “Faces”: examples of faulty detections (false
alarms and misdetections) produced by the best among de-
tectors trained on statistical moments (n = 3, N = 7, B =
16).
Table 6: “Faces”: time performance for a 640× 480 image
(parallel computations on: Intel Xeon E5-2699 v4 CPU 2.2
GHz, 22/44 cores/threads, 55 MB cache).
SMs (12544) [3, 7], T = 512, B = 16
quantity (or operations) time or amount
no. of analyzed windows 150849
total time of detection procedure 722ms
no. of prepared integral images 16
preparation time of all integral images 62ms
preparation time per 1 integral image 3.875ms
time per 1 window 4.786µs (amortized: 4.375µs)
no. of distinct features used by ensemble 484
time per 1 window and 1 feature 9.89ns (amortized: 9.04ns)
We also remark that we stick to fairly low or-
ders of moments n = 2,3 for computational reasons.
Be reminded that formula (??) from Proposition 1
is constant-time regardless of the number of pixels
in the analyzed window, but it does depend on the
imposed orders of moments. It requires O(pq) op-
erations, hence O(n
2
) with respect to n. Therefore,
one must consider the trade-off between accuracy and
time performance. In the case of our face detection
experiments, switching to n= 4 would result in detec-
tion times higher roughly by the factor of 1.5 taking
into account formula (12).
5.3 “Faces”: Statistical Moments vs
Haar-like Features
In this experiment we compare face detectors trained
on statistical moments (SMs) and Haar-like features
(HFs). More precisely, we take under considerations
four detectors:
(A) the best detector from the previous section
trained on SMs (12544 features),
(B) the worst detector from the previous section
trained on SMs (5625 features),
(C) a detector trained on HFs (6125 features),
(D) a detector trained on a combination of features
from cases C and B: HFs (6125 features) and
SMs (5625 features).
The above numbers given in parentheses indicate
the counts of features available at the learning stage,
not the counts of distinct features finally applied. It
should be explained that the number of Haar-like fea-
tures is implied by the following parameterization of
the related feature space: 5 Haar templates
7
, 25 scaled
versions of a feature per a template, 7× 7 grid of an-
choring points (5· 25· 7
2
= 6125).
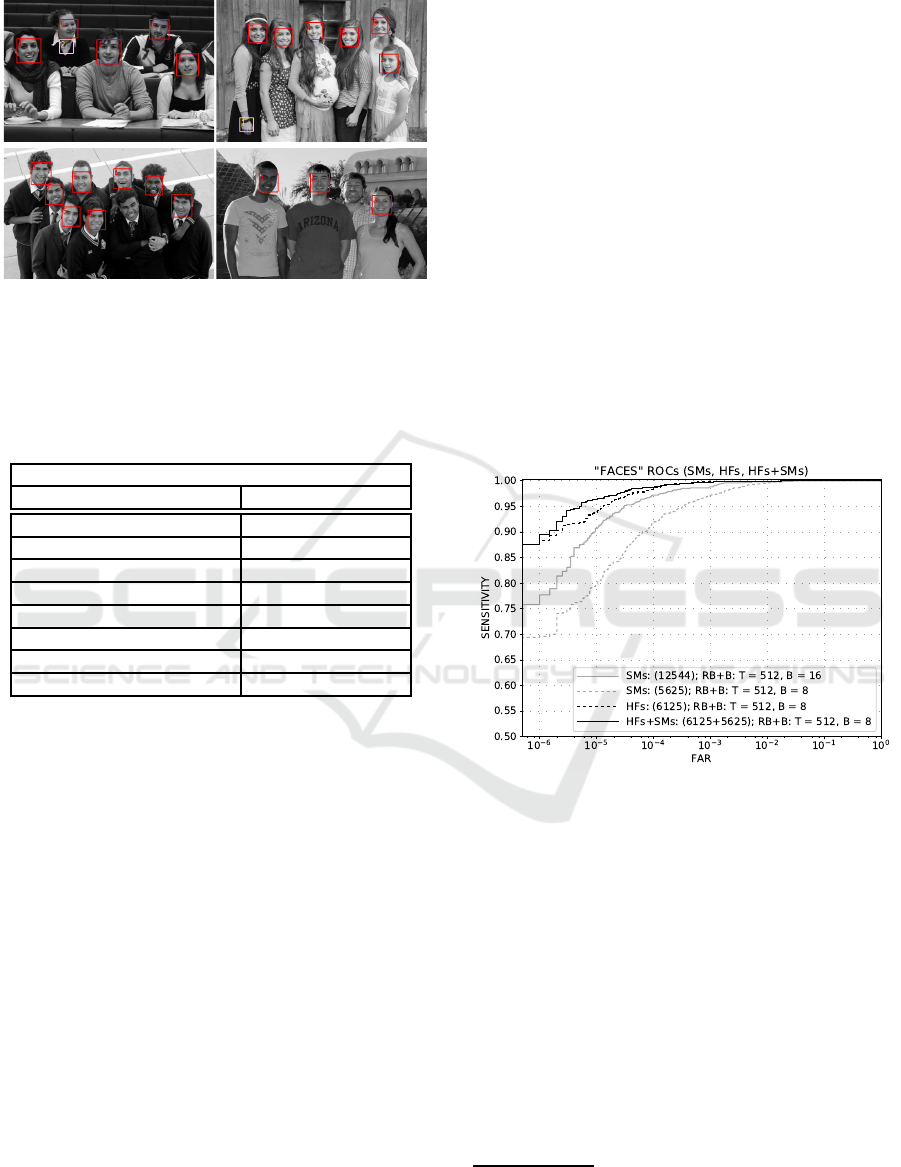
Results. ROC curves obtained for the four consid-
ered detectors are plotted in Fig. 9.
Figure 9: ROC curves for face detectors trained on: statisti-
cal moments (SMs), Haar-like features (HFs), and a mixture
(HFs+SMs).
The following two observations can be formulated
immediately by looking at the ROC characteristics:
(1) Haar-like features appear to be better suited for
face detection than statistical moments (for our con-
ditions of the experiment); (2) operating characteris-
tics obtained for the detector using the combined fea-
ture space surpass all others. A closer insight into
the particular features selected by the combined de-
tector revealedthat there were 155 statistical moments
within the total of 486 distinct features in the ensem-
ble (≈ 32%). In other words, the combined detec-
tor benefited from both the information residing in
Haar-like features and statistical moments.
7
2 vertical templates (double and tirple rectangle), 2 hor-
izontal templates (double and tirple rectangle), 1 diagonal
template
Constant-time Extraction of Statistical Moments for Object Detection Procedures
57

Table 7 presents detailed accuracy measures ob-
tained by the detection procedure carried out on 500
test images. The combined detector (HFs+SMs)
turned out to be superior than all others, however, the
difference from the detector based on HFs alone is
very small and may be data dependent (within statisit-
cal error).
Table 7: “Faces”: detection results for detectors trained on:
statistical moments (SMs), Haar-like features (HFs), and a
mixture (HFs+SMs).
detector
description AUC
10
−5
sensitivity FAR FAR accuracy
(no. of feats.)
per
image
per
window
[·10
−7
]
per
window
B = 8
SMs (12544) 0.8495
867/1000
= 0.867
65/500
= 0.130
9.25 0.999997181647274
SMs (5625) 0.7550
752/1000
= 0.752
58/500
= 0.116
8.26 0.999995644363969
HFs (6125) 0.9151
953/1000
= 0.953
28/500
= 0.056
3.99 0.999998932442149
HFs+SMs
(6125+5625)
0.9381
947/1000
= 0.947
21/500
= 0.042
2.99 0.999998946676254
Finally, Table 8 presents a juxtaposition of time
measurements obtained for the two most interesting
detectors based on: Haar-like features alone and a
combination of Haar-like features and statistical mo-
ments. The reader is also encouraged to confront the
numbers in the table with results reported in the for-
mer experiment (Table 8).
6 CONCLUSIONS
We have proposed a compuational technique which
allows to extract statistical moments (normalized,
central) of arbitrary order with a support of special
integral images. The computation time does not de-
pend on the number of pixels in the detection win-
dow, and therfore is a constant-time computation in
this respect, but does depend on the particular order
of each moment. As an auxiliary technique, we have
proposed a partitioning scheme for the detection win-
dow. By applying it, one can generate large feature
spaces while keeping the maximum order of moments
reasonably small. We belief our proposition can ex-
tend the repertoire of existing approaches dedicated
for dense detection procedures.
The presented idea can be regarded as both com-
petitive and complementary to the commonly met
Haar-like features. In particular, the experiment from
Section 5.3 demonstrates that a detector can bene-
fit from having different kinds of features at disposal
Table 8: “Faces”: time performance for a 640× 480 image
for detectors based on HFs and HFs+SMs (parallel compu-
tations on: Intel Xeon E5-2699 v4 CPU 2.2 GHz, 22/44
cores/threads, 55 MB cache).
HFs (6125), B = 8, T = 512
quantity (or operations) time or amount
no. of analyzed windows 150849
total time of detection procedure 289ms
no. of prepared integral images 1
preparation time of all integral images 8ms
preparation time per 1 integral image 8ms
time per 1 window 1.916µs (amortized: 1.863µs)
no. of distinct features used by ensemble 486
time per 1 window and 1 feature 3.94ns (amortized: 3.83ns)
HFs+SMs (6125+5625), B = 8, T = 512
quantity (or operations) time or amount
no. of analyzed windows 150849
total time of detection procedure 522ms
no. of prepared integral images 26
preparation time of all integral images 87ms
preparation time per 1 integral image 3.346ms
time per 1 window 3.460µs (amortized: 2.884µs)
no. of distinct features used by ensemble 486
time per 1 window and 1 feature 7.12ns (amortized: 5.93ns)
when learning, e.g. both: Haar-like features and sta-
tistical moments. Obviously, from the point of view
of computational complexity, the constant-time fea-
ture extraction is a prerequisite for such a favourable
scenario to take place.
As regards other work within our research project,
both ongoing and future, it pertains to various types of
features used in detection tasks and attempts at rep-
resenting them via special integral images. In par-
ticular, we have already achieved some results for
constant-time extraction of Fourier moments of low
orders (Kle¸sk, 2017). We still plan to ‘attack’ Zernike
and Fourier–Mellin moments and back their extrac-
tion with integral images.
ACKNOWLEDGEMENTS
This work was financed by the National
Science Centre, Poland. Research project
no.: 2016/21/B/ST6/01495.
REFERENCES
Abandah, G. and Anssari, N. (2009). Novel Moment Fea-
tures Extraction for Recognizing Handwritten Arabic
Letters. Journal of Computer Science, 5(3):226–232.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
58

Appel, R. et al. (2013). Quickly Boosting Decision Trees
— Pruning Underachieving Features Early. In Proc. of
the 30th Int. Conference on Machine Learning (ICML-
13), volume 28, pages 594–602. JMLR Workshop and
Conference Proceedings.
Boveiri, H. (2010). On Pattern Classification Using Statis-
tical Moments. International Journal of Signal Pro-
cessing and Pattern Recognition, 3(4):15–24.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In Proceedings of the
2005 IEEE Computer Society Conference on Com-
puter Vision and Pattern Recognition (CVPR’05) -
Volume 1 - Volume 01, CVPR ’05, pages 886–893,
Washington, DC, USA. IEEE Computer Society.
de Campos, T. E., Babu, B. R., and Varma, M. (2009). Char-
acter recognition in natural images. In Proceedings
of the International Conference on Computer Vision
Theory and Applications, Lisbon, Portugal.
Friedman, J., Hastie, T., and Tibshirani, R. (2000). Additive
logistic regression: a statistical view of boosting. The
Annals of Statistics, 28(2):337–407.
Kle¸sk, P. (2017). Constant-time fourier moments for face
detection — can accuracy of haar-like features be
beaten? In Artificial Intelligence and Soft Comput-
ing: 16th International Conference, ICAISC 2017, Za-
kopane, Poland, June 11-15, 2017, Proceedings, Part
I, pages 530–543. Springer International Publishing.
Noh, Y., Koo, D., Kang, Y., et al. (2017). Automatic crack
detection on concrete images using segmentation via
fuzzy c-means clustering. In International Conference
on Applied System Innovation (ICASI 2017), pages
877–880. IEEE.
Rasolzadeh, B. et al. (2006). Response Binning: Improved
Weak Classifiers for Boosting. In IEEE Intelligent Ve-
hicles Symposium, pages 344–349.
Said, Y., Atri, M., and Tourki, R. (2011). Human detection
based on integral Histograms of Oriented Gradients
and SVM. In Communications, Computing and Con-
trol Applications (CCCA 2011), pages 1–5. IEEE.
Schapire, R. and Singer, Y. (1999). Improved boosting us-
ing confidence-rated predictions. Machine Learning,
37(3):297–336.
Terrillon, J.-C., McReynolds, D., Sadek, et al. (2000). In-
variant neural-network based face detection with or-
thogonal Fourier-Mellin moments. In Pattern Recog-
nition, 2000. Proceedings. 15th International Confer-
ence on, volume 2, pages 993–1000.
Viola, P. and Jones, M. (2001). Rapid Object Detection
using a Boosted Cascade of Simple Features. In Con-
ference on Computer Vision and Pattern Recognition
(CVPR’2001), pages 511–518. IEEE.
Viola, P. and Jones, M. (2004). Robust Real-time Face
Detection. International Journal of Computer Vision,
57(2):137–154.
APPENDIX
Proof of Proposition 1
Proof. The derivation is started from formula (4).
First, the means (moments of order one), that are
present under powers, should be multiplied by suit-
able unity terms: µ
1,0
·
·
x
2
−x
1
x
2
−x
1
, µ
0,1
·
·
y
2
−y
1
y
2
−y
1
. This allows
to extract the denominators and form the normaliz-
ing constant 1/(D(x
2
− x
1
)
p
(y
2
− y
1
)
q
) in front of the
summation. Then, the powers are expanded by means
of the binomial theorem, grouping the terms into the
ones dependent on the current pixel index (x,y) and
the ones independent of it. This yields:
1
D(x
2
− x
1
)
p
(y
2
− y
1
)
q
∑
x
1
6x6x
2
∑
y
1
6y6y
2
p
∑
l=0
p
l
x
l
−x
1
− µ
1,0
x
1
,y
1
x
2
,y
2
(x
2
− x
1
)
p−l
·
q
∑
m=0
q
m
y
m
−y
1
− µ
0,1
x
1
,y
1
x
2
,y
2
(y
2
− y
1
)
q−m
· i(x,y)
. (17)
Finally, by changing the order of summations one ar-
rives at:
1
D(x
2
− x
1
)
p
(y
2
− y
1
)
q
·
p
∑
l=0
p
l
−x
1
− µ
1,0
x
1
,y
1
x
2
,y
2
(x
2
− x
1
)
p−l
·
q
∑
m=0
q
m
−y
1
− µ
0,1
x
1
,y
1
x
2
,y
2
(y
2
− y
1
)
q−m
·
∑
x
1
6x6x
2
∑
y
1
6y6y
2
x
l
y
m
i(x,y)
|
{z }
∆
x
1
,y
1
x
2
,y
2
(ii
l,m
)
. (18)
The underbrace indicates how the expensive summa-
tion over all pixels in the rectangle gets replaced by
the cheap constant-time computation of the growth of
a suitable integral image. Note also that the required
normalizer D is calculated by the growth of the zeroth
order integral image D = ∆
x
1
,y
1
x
2
,y
2
(ii
0,0
).
Constant-time Extraction of Statistical Moments for Object Detection Procedures
59
