
Transfer Learning to Adapt One Class SVM Detection to Additional
Features
Yongjian Xue and Pie rre Beauseroy
Institut Charles Delaunay/LM2S, UMR CNRS 6281, Universit´e de Champagne, Universit´e de Technologie de Troyes,
12, rue Marie Curie CS 42060 - 10004, Troyes Cedex, France
Keywords:
Transfer Learning, Multi-task Learning, Outliers Detection, One Class Classification.
Abstract:
In t his paper, we use the multi-task learning idea to solve a problem of detection with one class SVM when
new sensors are added to the system. The main idea is t o adapt the detection system to the upgraded sensor
system. To solve that problem, t he kernel matrix of multi-task learning model can be divided into two parts,
one part is based on the former features and the other part is based on the new features. Typical estimation
methods can be used to fi ll the corresponding new features in the old detection system, and a variable kernel is
used for the new features in order to balance the importance of the new features with the number of observed
samples. Experimental results show that it can keep the false alarm rate relatively stable and decrease the miss
alarm rate rapidly as the number of samples increases in t he target task.
1 INTRODUCTION
In real applications, many machine learning models
may not work very well due to the ideal assumption
that the training d ata and the future data are subject
to the same distribution or that they are observed in
the same feature space, which may not hold with re-
cent system that can evolve based on sen sor upgrade
or use of logical software based on sensors. Trans-
fer learning approach arose accordingly to solve that
problem, and it has received significant attention in
recent years, which is widely studied in both supervi-
sed learning and unsuperv ised learning area (Pan and
Yang, 2 010). In this paper, we focus on using the
multi-task learning approach to solve the transfer le-
arning problem to one class classification or outliers
detection problem, where the detection model may
experience a change due to practical reasons.
For detection, two kinds of one class supp ort vec-
tor machines are mainly used. One is proposed b y
(Tax and Duin, 1999), which aims to find a hypersp-
here with minimal volume to enclose the data sam-
ples in feature space, the amount of data within the
hypersp here is tuned by a parameter C (noted as C-
OCSVM). Another one is introduced by (Sch¨olkopf
et al., 2001), which finds an optimal hyperplane in
feature space to separate a selected proportion of the
data samples from the origin, and the selection para-
meter is ν which gives an upper boun d on the fraction
of outliers in the training data (noted as ν-OCSVM).
It is proved that these two approaches lead to the same
solution according to (Chang and Lin, 2001), if a re-
lationship between parameters ν and C is fulfilled and
under build condition over the choice of the kernel.
From data driven side, we can divide the issues for
such detectio n system into two categories. One is the
transfer learning problem when the feature space re-
mains th e same meaning that the number of features is
not c hanged but are drown from a different data distri-
butions. For example, the in troduction of a detection
task for a new version of a system, or the update of a
detection a fter system maintenances with sensor up-
date. Another issue is the transfer learning problem
in different fe ature space, where we have different
number of features for the target task. For example,
in the application of fault detection for an engine sy-
stem, there are a few sensors which have already wor-
ked on an engine d ia gnosis system for much time and
every sensor gets a few data. Now due to technical
or some othe r practical needs, such as improving de-
tection performances, new senso rs are added to this
system. As far as we know, this problem has never
been tackled in the detection context using one class
SVM.
Instead of training a new detection system from
scratch, multi-task learning seems to b e an ideal mean
to adapt the former detection to an updated system,
since it uses th e assumption which is satisfied in
78
Xue, Y. and Beauseroy, P.
Transfer Learning to Adapt One Class SVM Detection to Additional Features.
DOI: 10.5220/0006553200780085
In Proceedings of the 7th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2018), pages 78-85
ISBN: 978-989-758-276-9
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

our context that related tasks share some co mmon
structure or similar model parameters ( Evgeniou and
Pontil, 2004), assumin g one task is the former system
and the second one is the upd a te d system. And the
idea is also used to solve one class classification pro-
blem by (Yang et al., 2010; He et al., 2014), but both
of them are subject to the situation that the related
tasks are in the same feature space. In (Xue and Beau-
seroy, 2016), a new multi- ta sk learning model is p ro-
posed to solve the detection problem when additional
new feature is added, where it gives a good transi-
tion from the old detection system to the new mo di-
fied one. However, in some cases the kernel matrix in
that model is not positive semi-definite which means
that some approximation in a semi-definite subspace
must be considered to determine the detection.
In this paper, a new approach is proposed to avoid
that issue. As is shown in section 2.2, we can divide
the kernel matrix into two part, one part is based on
the old features and the second part is based on the
new added feature. After typical estimation method is
condu c te d to fill the corresponding new feature in the
old detection system in order to get a positive semi-
definite matrix, a specific variable kernel is used in the
second kernel matrix (which is base on the new fea-
ture) to co ntrol the impa ct of the new feature over the
detection according to the am ount of collected new
data.
The paper is organised as follows. I n section 2, we
propose the approac h to use multi-task lear ning idea
to solve one class SVM problems with the same fe -
atures and w ith additional new features respectively.
Then we prove the effectiveness of the proposed ap-
proach by experimental results in section 3. Finally,
we give conclusions and future work in section 4.
2 MULTI-TASK LEARNING FOR
ONE CLASS SVM
For the one class transfer learning classification p ro-
blem, two kinds of situation might happen depending
whether the source task and the target task share the
same feature space (homogenous case) or not (hete-
rogenous case). To study the heterogenous case, we
consider th e situation of adding new feature one b y
one in target task to simulate the modification or evo-
lution of an existing detectio n system.
2.1 Homogeneous Case
Consider the case of source task (with data set X
1
∈
R
p
) and target task (with data set X
2
∈ R
p
) in the
same space. For source task, a good dete ction model
can be trained based on a large number of samples
n
1
. After the maintenance or modificatio n of the sy -
stem, we have just a limited number of samples n
2
during a period of time. Intuitively, we may either try
to solve the proble m by considering independent se-
parated tasks or treat them together as one single task.
Inspired by references (Evgenio u and Po ntil, 2004)
and (He et al., 2014), a multi-task learning method
which trie s to ba la nce between the two extreme cases
was proposed by (Xue and Beauseroy, 2016). The de-
cision function for each task t ∈ {1, 2} (where t = 1
correspo nds to the source task and t = 2 corresponds
to the target task) is defined as:
f
t
(x) = sign(hw
t
, φ(x)i−1), (1)
where w
t
is the normal vector to the decisio n hyper-
plane and φ(x) is the non-linear feature mapping. In
the chosen multi-task learning approach, the needed
vector of each task w
t
could be divided into two part,
one part is the common mean vector w
0
shared among
all the learning tasks and the oth e r part is the spec ific
vector v
t
for a specific task.
w
t
= µw
0
+ (1 −µ)v
t
, (2)
where µ ∈ [0, 1]. When µ = 0, then w
t
= v
t
, which
correspo nds to two separated task, while µ = 1, im-
plies that w
t
= w
0
, which corresponds to one single
global task. Based on this setting, the primal one class
problem c ould be formulate d as:
min
w
0
,v
t
,ξ
it
1
2
µ k w
0
k
2
+
1
2
(1 −µ)
2
∑
t=1
k v
t
k
2
+C
2
∑
t=1
n
t
∑
i=1
ξ
it
s.t. hµw
0
+ (1 −µ)v
t
, φ(x
it
)i ≥ 1 −ξ
it
, ξ
it
≥ 0,
(3)
where t ∈ {1, 2}, x
it
is the ith sample from task t, ξ
it
is the corresponding slack variable and C is pen alty
parameter.
Based on the Lagrangian, the dual form could be
given as:
max
α
−
1
2
α
T
K
µ
α+ α
T
1
s.t. 0 ≤α ≤C1,
(4)
where α
T
= [α
11
, ..., α
n
1
1
, α
12
, ..., α
n
2
2
] and
K
µ
=
K
ss
µK
st
µK
T
st
K
tt
(5)
is a modified Gram matrix, K
ss
= hφ(X
1
), φ(X
1
)i,
K
st
= hφ(X
1
), φ(X
2
)i, K
tt
= hφ(X
2
), φ(X
2
)i, which
means that we can solve the problem by classical one-
class SVM with a specific kernel (we u se Gaussian
kernel in this paper).
Accordingly, the dec ision function for the target
task c ould be defined as:
f
2
(x) = sign(α
T
µhφ(X
1
), φ(x)i
hφ(X
2
), φ(x)i
−1). (6)
Transfer Learning to Adapt One Class SVM Detection to Additional Features
79

2.2 Heterogenous Case
Due to practical reasons, when new feature is added to
the old detection system, if we continue to use the old
detection system w e will not be able to take advan-
tage of the new information to improve the dete ction
performances. If we wait until we gather enough new
data to train a new dete ctor which mea ns that on one
hand we h ave to delay the benefit of the update o f the
system, and on the other hand we have to g o throug h
all the hyper par ameter optimisation process which
may be time consuming. On the contrary, the multi-
task learning model should be able to take into consi-
deration the information brought by the new feature.
We introduce a former method (MT L
I
) and a new one
(MT L
II
) to tackle that problem. For both we c onsider
X
1
∈ R
p
be the data set o f the old de te ction system,
and X
2
∈ R
p+1
be the data set since new feature is
added.
2.2.1 MT L
I
Notice that for the formulation of multi-task learning
(4), if w e want to compute the modified Gram matrix
(5), problem h a ppens with block matrix K
st
because
of the different features for the source task and the tar-
get task. In the work of (Xue and Beauseroy, 2016),
named as MT L
I
, the new feature is ignored for com-
puting matrix K
st
. To some extend, it gives a bala nce
from the old detection system to the new one by tu-
ning the parameter µ with a proposed criteria. Howe-
ver, by using this method, the modified kernel matrix
is not always positive semi-definite which means that
a global optimisation solution can not b e guaranteed
with standard approach.
2.2.2 MT L
II
To fill the corresponding new feature, some estima-
tion methods like the nearest neighbour, the imp u-
tation etc., can be used. Accordingly, we g et
˜
X
1
=
{x | x
(1)
, ..., x
(p)
,
˜
x
(p+1)
}, where
˜
x
(p+1)
is the n ew fe-
ature in the old detection system estimated by using
informa tion from X
2
. The drawback of this method is
that when the number of samples X
2
for target task is
small, it is hard to give a good estimation to the new
feature in X
1
.
Once we get
˜
X
1
∈ R
p+1
and X
2
∈ R
p+1
, as we
use G a ussian kernel, then the kernel matrix in (5) can
be decomposed into two par t:
K
µ
=
K
ss
µK
st
µK
T
st
K
tt
R
p+1
=
K
ss
µK
st
µK
T
st
K
tt
R
p
|
{z }
A
0
◦
˜
K
ss
˜
K
st
˜
K
T
st
K
tt
R
1
| {z }
A
1
,(7)
where ◦ is element-wise product and A
0
is kernel ma-
trix based on R
p
with the first pth features for X
1
and
X
2
, A
1
is kernel matrix based on R
1
space with the
p + 1th estimated feature
˜
x
(p+1)
from X
1
and x
(p+1)
from X
2
. Notice that K
µ
is a positive semi-definite
matrix wh e n µ ∈ [0, 1], even if different kernel para-
meters are adopted for computing A
0
and A
1
.
We u se the Gaussian kernel that is defined as:
k(x
i
, x
j
) = exp(
kx
i
−x
j
k
2
−2σ
2
), (8)
where σ is the kern e l param eter. Notice that when
σ → +∞ then k(x
i
, x
j
) →1. So we propose to u se the
former σ
0
for R
p
subspace and to choose a varying
σ(n) for the new feature, where n is the numbe r of
samples. As a first intuition, we want σ(n
2
) to be
large when n
2
is small and to be close to σ
0
when
n
2
is large.
By do ing this, the entries of matrix A
1
will tend
to be 1 when n
2
is small, which means th at it does
not have very important influence to th e total kernel
matrix when the estimation of the new feature ˜x
(p+1)
in X
1
is not very dependable. As n
2
becomes lar-
ger, more information is brought in from the new fea-
ture and a better estimation of ˜x
(p+1)
will be obtained,
more consideration shou ld be taken for matrix A
1
, so
σ decreases and it converges to the same value as σ
0
when n
2
is large enou gh.
In kernel density estimation, the optimal window
width for a standard distribution is given by (Silver-
man, 1986):
h
opt
=
4
d + 2
1
d+4
n
−
1
d+4
, (9)
where d is the number of dimensions and n is the
number of samples.
Upon above, the kernel parameter function for A
1
could be defined as:
σ(n) = c
2
exp(
c
1
3
√
n
)h
opt
, (10)
where the exponent function exp(
c
1
3
√
n
) decreases from
a large value when n is small to a small value close
to 1 when n is large, which means that we multiply
h
opt
by a large number at the beginning and we almost
keep h
opt
when n is large enough. The constant c
1
is
used to control the value that we want to multiply h
opt
when n is small and c
2
is a scale factor that makes
σ(n) converge to σ
0
when n is large. A few groups of
σ(n) are shown in figure 2. We name this multi-task
learning method as MT L
II
in this paper.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
80
3 EXPERIMENTS
In this section, experiments are conducted on artificial
data set. We compare the proposed method MT L
II
with the former one MT L
I
, as well as the other pos-
sible solutions: the old detection system T
1
based on
the old featu res, the new detection system T
2
based
on data when new feature is added, and the union de-
tection system T
big
which is based on the e stima te d
data
ˆ
X
1
and the new obtained data X
2
.
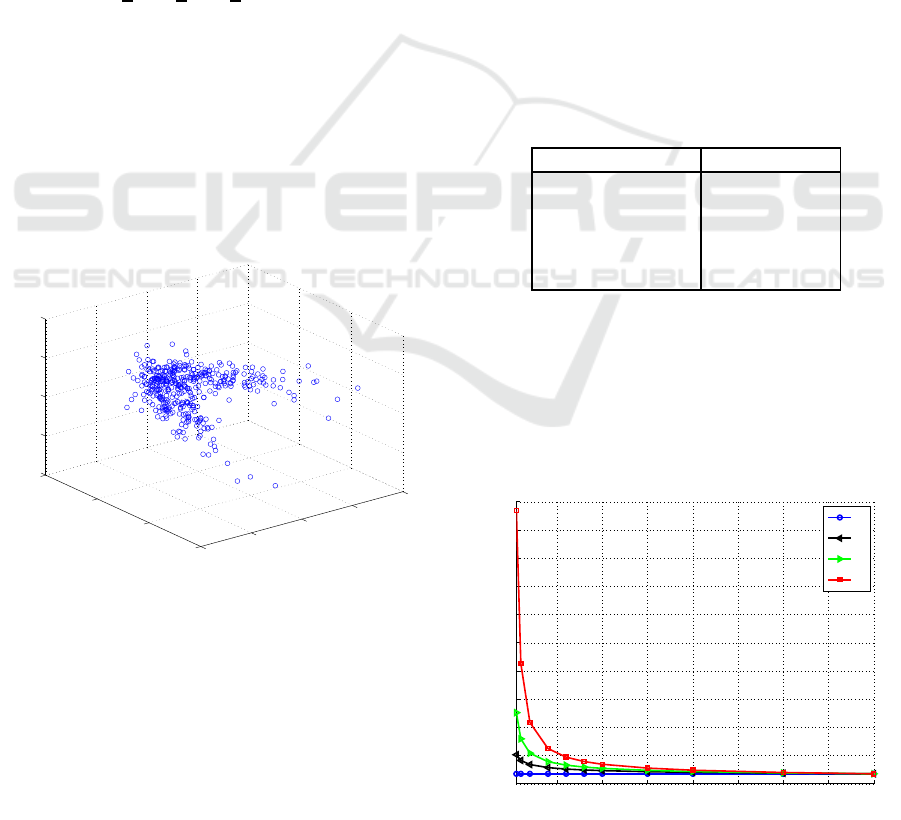
3.1 Setup
Let y
1
, y
2
, y
3
, y
4
∼ N(0, 1), three features are defined
as:
x
(1)
= y
1
, (11)
x
(2)
= 3 cos(
1
2
y
1
+
1
2
y
2
+
1
4
y
3
) + N(0, 0.05), (12)
x
(3)
= y
4
, (13)
where N(0, 0.05) is G aussian noisy. We use X
1
= {x |
x
(1)
, x
(2)
} as the data set for the old detection system
(source task), and X
2
= {x | x
(1)
, x
(2)
, x
(3)
} as th e data
set for the new detection system (target task). The
number of training samples is n
1
= 2 00, and we in-
crease n
2
from 5 to 400 to simulate the change of the
new detectio n system. A 3 dimensional view of the
data set is shown in figure 1.
−4
−2
0
2
4
−2
0
2
4
−4
−2
0
2
4
x
(1)
x
(2)
x
(3)
Figure 1: 3D view of the data set.
To test the performance of the detection system,
20,000 positive samples are generated from X
2
to test
the false alarm rate. Besides that, we use 20,000 uni-
form distribution data which cover the whole test data
set to test the performa nce of miss alarm rate. Speci-
fically, let u
(1)
, u
(2)
, u
(3)
∼U (−4, 4), three groups of
negative samples a re defined as:
1. Uniform distribution for all the feature s X
negI
=
{x | u
(1)
, u
(2)
, u
(3)
}.
2. Uniform d istribution only for the third dimension
X
negII
= {x | x
(1)
, x
(2)
, u
(3)
} to simulate the out-
liers coming from the new added feature.
3. Uniform distribution only for the first two dimen-
sions X
negIII
= {x |u
(1)
, u
(2)
, x
(3)
} to simulate the
outliers coming from the old features.
We choose kernel p arameter σ
0
= 1.75 and ν =
0.1 fo r ν-OCSVM (it exits a corre sponding C for
C-OCSVM) which make the proportion of outliers
around 0.1 for the old detection system at the begin-
ning. A list of the comparison of different me thods
is shown in table 1. Where
˜
X
1
= {x | x
(1)
, x
(2)
,
˜
x
(3)
},
˜x
(3)
is the e stima ted feature (we use nearest n eighbour
method to fill this new fe ature) and X
2
\x
(3)
denotes
that X
2
without the new feature . For T
1
, T
2
and T
big
,
the same kernel parameter σ
0
is used, for MT L
I
the
setting is same as in (Xue and Beauseroy, 2016) and
for MT L
II
, σ
0
is used for the first two features and a
variation of σ(n) according to (1 0) is used for the third
feature. The choice of µ for MT L
II
is c onducted by
the criteria proposed in (Xue and Beauseroy, 2 017).
All the results are averaged by 10 time s.
Table 1: Setting of the comparison of different methods.
Compare methods Train data sets
T
1
X
1
, X
2
\x
(3)
T
2
X
2
T
big
˜
X
1
, X
2
MT L
I
X
1
, X
2
MT L
II
˜
X
1
, X
2
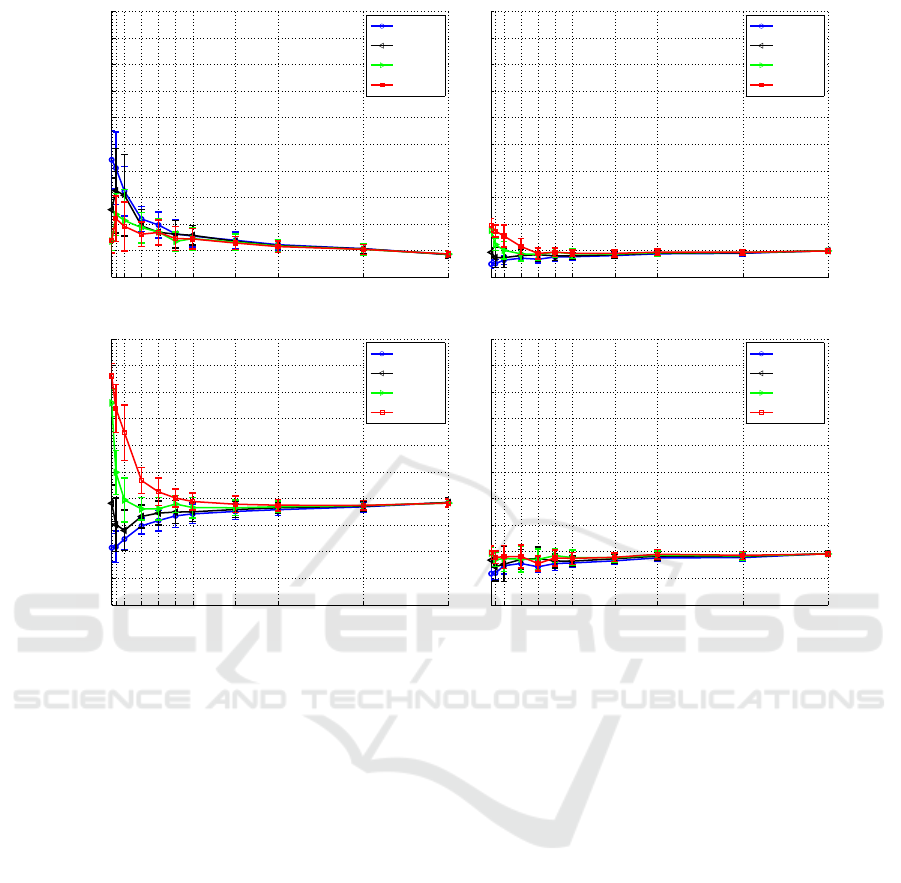
3.2 Performance with Different Kernel
Parameters
Three groups of kernel parameters σ
1
, σ
2
, σ
3
are ge-
nerated to test the performance o f MT L
II
. As shown
in figure 2, we choose c
1
= 1 , 3, 6 and then choo se
50 100 150 200 250 300 350 400
0
5
10
15
20
25
30
35
40
45
50
σ
n
2
σ
0
σ
1
σ
2
σ
3
Figure 2: Different kernel functions.
Transfer Learning to Adapt One Class SVM Detection to Additional Features
81
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
False alarm rate
n
2
5
10
20
40
60
80
100
150
200
300
400
MTL
II
(σ
0
)
MTL
II
(σ
1
)
MTL
II
(σ
2
)
MTL
II
(σ
3
)
(a)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Miss alarm rate
n
2
5
10
20
40
60
80
100
150
200
300
400
MTL
II
(σ
0
)
MTL
II
(σ
1
)
MTL
II
(σ
2
)
MTL
II
(σ
3
)
(b)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Miss alarm rate
n
2
5
10
20
40
60
80
100
150
200
300
400
MTL
II
(σ
0
)
MTL
II
(σ
1
)
MTL
II
(σ
2
)
MTL
II
(σ
3
)
(c)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Miss alarm rate
n
2
5
10
20
40
60
80
100
150
200
300
400
MTL
II
(σ
0
)
MTL
II
(σ
1
)
MTL
II
(σ
2
)
MTL
II
(σ
3
)
(d)
Figure 3: Results of different kernel parameters for MT L
II
: (a) false alarm rate, (b) miss alarm rate on X
negI
(uniform data for
all features), (c) miss alarm rate on X
negII
(uniform data only for new f eature), (d) miss alarm rate on X
negIII
(uniform data
only for old features).
correspo nding c
2
in (10) which makes σ(400) = σ
0
(where σ
0
= 1.75 is the kernel parameter for the old
detection system).
Results of MT L
II
are shown in figure 3 with dif-
ferent σ fo r computing A
1
in (7). If we use con-
stant σ
0
, the false alarm rate is very high whe n n
2
is small because of the bad estimation while lack of
samples from X
2
. Both the false alarm rate and the
miss alarm rate w ill become more stable as n
2
incre-
ases due to better estimation for ˜x
(3)
. However, with
the variation of kernel parameters σ
1
, σ
2
, σ
3
, when n
2
is small, the larger σ is, the c loser of A
1
is to a ma-
trix with 1 elements (that means we are using a kernel
matrix which is very close to the matrix just based
on the old features), so we increase less for the false
alarm ra te (MT L
II
(σ
3
) < MT L
II
(σ
2
) < MT L
II
(σ
1
) <
MT L
II
(σ
0
)).
As f or the miss alarm rate on X
negI
(figure 3(b))
to simulate th e outliers coming from for all features,
the method with variation kernel parameters increa-
ses a bit at the beginning and it decreases rapidly to
the same value as we use fixed one. The same trend
happens for data set X
negII
(figure 3(c)) to simula te
the outliers coming from the new features except at
the beginning, where the miss alarm rate is re la tively
high, but as we increase n
2
, we decrease σ and the
miss alarm rate decreases rapidly to the same value
with fixed σ
0
. This kind of trend makes meaningful
sense because when new feature is added, while n
2
is small, if outliers are all f rom the new feature, we
can not decide them all as negative samples, instead
we would rather keep a relative stable false alarm rate
while reduce the miss alarm rate rapidly as n
2
incre-
ases which means that we take the new feature’s in-
formation into consideration gradually. For the miss
alarm rate on X
negIII
(figure 3(d)), all methods keep al-
most stable which means that we do not increase the
miss ala rm rate if the outliers come from the old fea-
tures. Fro m the ab ove ana lysis, MT L
II
(σ
3
) produces
a relatively good detection model when new feature
is added, where σ
3
is relatively large at the beginning
and it converges to σ
0
at the end.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
82
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
False alarm rate
n
2
5
10
20
40
60
80
100
150
200
300
400
T
1
T
2
T
big
MTL
I
MTL
II
(a)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Miss alarm rate
n
2
5
10
20
40
60
80
100
150
200
300
400
T
1
T
2
T
big
MTL
I
MTL
II
(b)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Miss alarm rate
n
2
5
10
20
40
60
80
100
150
200
300
400
T
1
T
2
T
big
MTL
I
MTL
II
(c)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Miss alarm rate
n
2
5
10
20
40
60
80
100
150
200
300
400
T
1
T
2
T
big
MTL
I
MTL
II
(d)
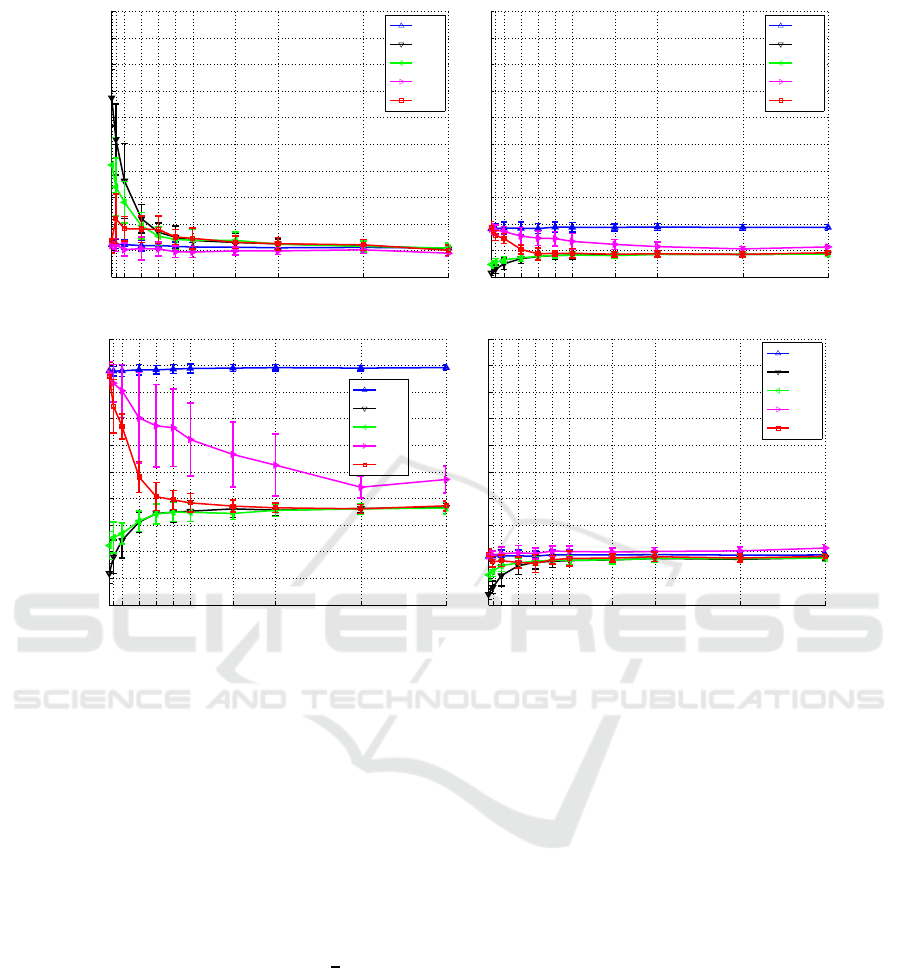
Figure 4: Compare results of different methods: (a) false alarm rate, (b) miss alarm rate on X
negI
(uniform data for all features),
(c) miss alarm rate on X
negII
(uniform data only for new feature), (d) miss alarm rate on X
negIII
(uniform data only for old
features).
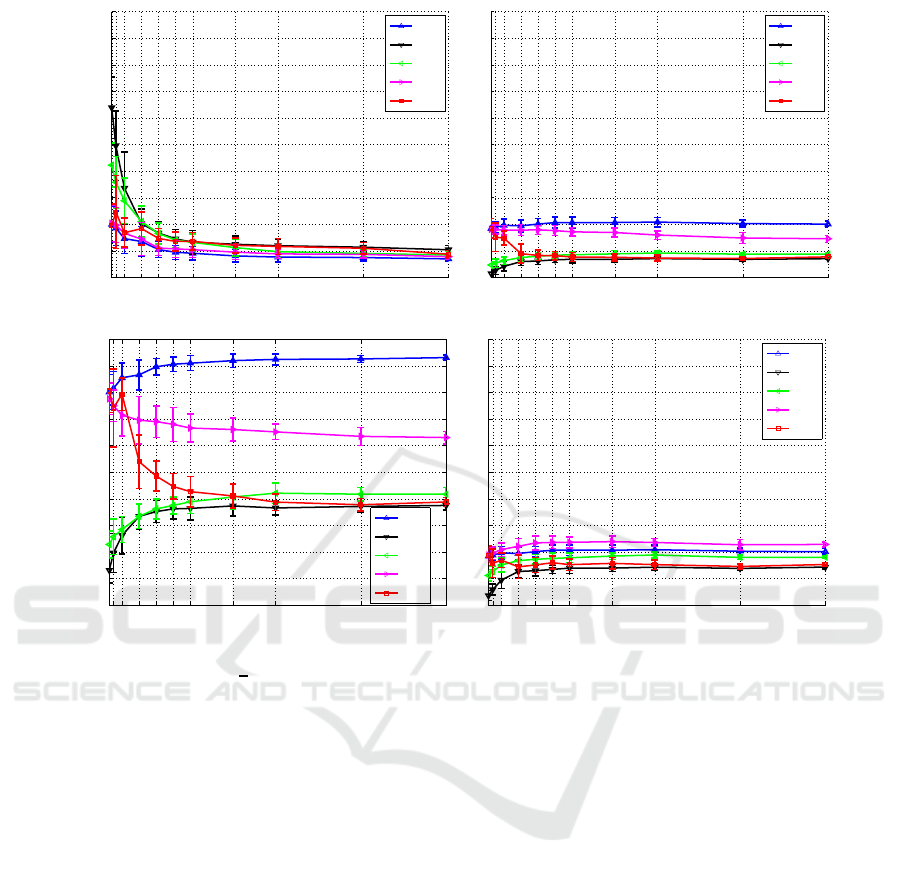
3.3 Experimental Results
We use MT L
II
(σ
3
) to compare with the other possi-
ble methods listed in table 1, results are repo rted in
figure 4 . Besides that, in order to study the problem
that might happen is the adaptation for the old feature
space ( that means the data distribution f or the old fe-
atures may experienc e a change due to system main-
tenance or upd a te ), we give a r otation o f
π
6
to the first
two features in X
2
to study the model’s performance
on this situation, and the results are shown in figure 5.
For the method T
1
, which is trained on the old f e a-
tures of X
1
and X
2
, the false alarm rate is almost con-
stant around 0.1, but the miss alarm ra te is the highest
one among all the other metho ds because it does not
take into consideration of the new feature.
For T
2
which is based only on X
2
since the new
feature is added, it gives very high false alarm rate
when n
2
is small, which means that it does not make
full use of th e infor mation from the former detection
system at the beginning, as n
2
increases large enough
(here n
2
> 1 50), it produces more stable false alarm
rate and miss alarm rate.
If we combine the estimated data set
˜
X
1
and X
2
to
train a detection model, named as T
big
, the false alarm
rate is lower than that of T
2
, and the miss alarm rate
will e nd up with the same as T
2
. However, with a ro-
tation of the first two features in X
2
, it will increase
the chance of miss alarm at the end (which is shown
in figure 5(b), 5( c) and 5(d)), because T
big
tends to in-
close all the train data set together. That means T
big
is
not practical when data distribution of the old features
experiences a change in the new detectio n system.
For m ulti-task learning method, both MT L
I
and
MT L
II
gives a transition from the old detection sy-
stem T
1
(which is just based on the old features) to the
new modified system T
2
(which is based on the new
data set X
2
since new feature is added) as n
2
increa-
ses. The false alarm rate of MT L
I
is a bit lower than
that of MT L
II
, and both of them are relatively stable
compare d to T
2
and T
big
. But for miss alarm rate, only
MT L
II
converges to that of T
2
while MT L
I
does not
Transfer Learning to Adapt One Class SVM Detection to Additional Features
83
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
False alarm rate
n
2
5
10
20
40
60
80
100
150
200
300
400
T
1
T
2
T
big
MTL
I
MTL
II
(a)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Miss alarm rate
n
2
5
10
20
40
60
80
100
150
200
300
400
T
1
T
2
T
big
MTL
I
MTL
II
(b)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Miss alarm rate
n
2
5
10
20
40
60
80
100
150
200
300
400
T
1
T
2
T
big
MTL
I
MTL
II
(c)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Miss alarm rate
n
2
5
10
20
40
60
80
100
150
200
300
400
T
1
T
2
T
big
MTL
I
MTL
II
(d)
Figure 5: Compare results with
π
6
rotation in X
2
for the first two features: (a) false alarm rate, (b) miss alarm rate on X
negI
(uniform data for all features), (c) miss alarm rate on X
negII
(uniform data only for new feature), (d) miss alarm rate on X
negIII
(uniform data only for old features).
as n
2
increases. And the general miss alarm rate of
MT L
II
is much lower than that of MT L
I
, this diffe-
rence is much la rger when there is a rotation to the
first two features in X
2
(figure 5). There fore, MT L
II
gives a b etter transition f rom the old detection system
to the new one than MT L
I
, it can keep the false alarm
rate relatively stab le while decrease the miss alarm
rate rapidly to a stable value.
4 CONCLUSIONS
In this paper, a modified approach of multi-task lear-
ning method MT L
II
is pro posed to solve the problem
of transfe r learning to one class SVM, wh e re additio-
nal new features are added in the target task.
The idea is to decompose the kernel matrix in
multi-task learning model into two pa rts, one part is
the kernel matrix based on the old features and the ot-
her part is the kernel matrix based on the new added
features. Typical methods can b e used to estimate the
correspo nding new features in the source data set in
order to compute the kernel matrix based on the new
features. Then a variable kernel is used to balance the
importance of the new features with the number of
new samples and at last it converges to the same value
as used in the old de te ction system. Experimental re-
sults sh ow th at the proposed method ou tperforms the
former propo sed method MT L
I
and the other possible
approa c hes.
Future work may consider online implementation
of the proposed approach.
REFERENCES
Chang, C.-C. and Lin, C.-J. (2001). Training v-support vec-
tor classifi ers: theory and algorithms. Neural compu-
tation, 13(9):2119–2147.
Evgeniou, T. and Pontil, M. (2004). Regularized multi–task
learning. In Proceedings of the tenth ACM SIGKDD
international conference on Knowledge discovery and
data mining, pages 109–117. ACM.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
84

He, X., Mourot, G ., Maquin, D., Ragot, J., Beauseroy,
P., Smolarz, A., and Grall-Ma¨es, E. (2014). Multi-
task learning with one-class svm. Neurocomputing,
133:416–426.
Pan, S. J. and Yang, Q. (2010). A survey on transfer lear-
ning. Knowledge and Data Engineering, IEEE Tran-
sactions on, 22(10):1345–1359.
Sch¨olkopf, B., Pl at t, J. C., Shawe-Taylor, J., Smola, A. J.,
and Williamson, R. C. (2001). Estimating the support
of a high-dimensional distribution. Neural computa-
tion, 13(7):1443–1471.
Silverman, B. W. (1986). Density estimation for statistics
and data analysis, volume 26. CRC press.
Tax, D. M. and Duin, R. P. ( 1999). Support vector domain
description. Pattern recognition letters, 20(11):1191–
1199.
Xue, Y. and Beauseroy, P. (2016). Multi-task learning for
one-class svm with additional new features. In Pattern
Recognition (ICPR), 2016 23rd International Confe-
rence on, pages 1571–1576. IEEE.
Xue, Y. and Beauseroy, P. (2017). Transfer learning for
one class svm adaptation to limited data distribution
change. Pattern recognition letters, accepted.
Yang, H., King, I., and Lyu, M. R. (2010). Multi-task lear-
ning for one-class cl assification. In Neural Networks
(IJCNN), The 2010 International Joint Conference on,
pages 1–8. IEEE.
Transfer Learning to Adapt One Class SVM Detection to Additional Features
85
