
Deep Reinforcement Learning for Advanced Energy Management of
Hybrid Electric Vehicles
Roman Liessner, Christian Schroer, Ansgar Dietermann and Bernard B
¨
aker
Dresden Institute of Automobile Engineering, TU Dresden, George-B
¨
ahr-Straße 1c, 01069 Dresden, Germany
Keywords:
Energy Management, Deep Learning, Reinforcement Learning, Hybrid Electric Vehicle.
Abstract:
Machine Learning seizes a substantial role in the development of future low-emission automobiles, as man-
ufacturers are increasingly reaching limits with traditional engineering methods. Apart from autonomous
driving, recent advances in reinforcement learning also offer great benefit for solving complex parameteriza-
tion tasks. In this paper, deep reinforcement learning is used for the derivation of efficient operating strategies
for hybrid electric vehicles. There, for achieving fuel efficient solutions, a wide range of potential driving
and traffic scenarios have to be anticipated where intelligent and adaptive processes could bring significant
improvements. The underlying research proves the ability of a reinforcement learning agent to learn nearly-
optimal operating strategies without any prior route-information and offers great potential for the inclusion of
further variables into the optimization process.
1 INTRODUCTION
Today, automobile manufacturers are confronted with
major demands regarding the development of new
drive trains. On the one hand, strict legislation and
regulation requiring overall and continuous reduction
of fuel consumption and emission levels of new ve-
hicles. On the other hand, rising customer demands
concerning vehicle dynamics, overall comfort and af-
fordability. While purely electric vehicles often lack
larger operation ranges and are still rather expensive
due to high costs for production and development, hy-
brid electric vehicles (HEV) offer a good compromise
to combine the benefits of conventional combustion
engines and novel electric motors.
The use of an electric machine (EM) as a supple-
mentary motor increases the degree of freedom of the
driving unit and a so-called operating strategy has to
be applied for the efficient coordination of both en-
ergy converters. Ideally, a variety of factors with ef-
fect on fuel consumption are taken into account by
such a strategy. These factors range from the driver’s
influence through different driving styles and habits,
environmental conditions like traffic, route and road
information up to internal state information of the ve-
hicle like fuel and battery levels. In general, these
factors can be seen as highly stochastic, intercorre-
lated and dependent on the individual situation. For
example, the driving style of a sporty driver operat-
ing a sports car in a large city is significantly different
from the driving style of the same driver in an all-
terrain vehicle in the mountains.
These scenarios are captured in velocity profiles,
so-called driving cycles, which are not only used for
calibration but also for certification of new vehicles.
Formerly, emission levels were derived purely from
deterministic cycles (e.g. “New European Driving
Cycle”) for which an efficient strategy could specif-
ically be optimized. Nevertheless, the ability of these
synthetic cycles to represent reality can and should be
questioned as the variety of potential driving scenar-
ios in real-world traffic is huge. For that reason, fu-
ture certification tests (Real Driving Emissions) (Eu-
ropean Commission, 2017) will be performed directly
on the road rather than in fully controlled testing
environments which poses major challenges for the
manufacturers. Therefore, traditional approaches for
the derivation of operating strategies with fixed rule-
based strategies seem outdated, especially with inclu-
sion of diverse driver, route and vehicle information.
In order to bring significant fuel and energy savings
beyond certification procedures to the actual customer
with every-day use of the vehicle, new and innovative
approaches are required for the energy management
of HEVs.
In recent years, machine learning has increasingly
gained momentum in the engineering context where
highly non-linear problems have to be solved and
Liessner, R., Schroer, C., Dietermann, A. and Bäker, B.
Deep Reinforcement Learning for Advanced Energy Management of Hybrid Electric Vehicles.
DOI: 10.5220/0006573000610072
In Proceedings of the 10th International Conference on Agents and Artificial Intelligence (ICAART 2018) - Volume 2, pages 61-72
ISBN: 978-989-758-275-2
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
61

greater abstraction levels reduce valuable informa-
tion. Reinforcement learning (RL) in particular of-
fers significant benefit for planning and optimiza-
tion tasks, mostly because an agent learns model-
free, with great efficiency and through direct interac-
tion with its environment. In contrast to traditional
RL methods, which were bound to rather small and
lowdimensional problems, the combination of RL and
neural networks, called deep reinforcement learning,
allows the application in very complex domains with
highdimensional sensory input. In the context of au-
tonomous driving for example, RL can play a vital
role in fine-grained control of the vehicle in challeng-
ing environments (Mirzaei and Givargis, 2017)(Chae
et al., 2017). Next to that, the energy management
of modern vehicles appears to be a problem where
state-of-the-art machine learning could dramatically
improve current technology, bringing significant ben-
efits to customers and the environment.
The main contributions of this paper are: (1) Deriva-
tion of a deep reinforcement learning framework ca-
pable of learning nearly-optimal operating strategies
(2) The use of stochastic driver models for improved
state generalization and preventing the strategy from
overfitting. (3) Inclusion of the battery temperature
with additional power limitation in to the optimiza-
tion process.
The paper is structured into six sections. Section
2 establishes the fundamentals of hybrid vehicles, en-
ergy management and reinforcement learning. Sec-
tion 3 introduces related work and a concrete formu-
lation of the problem. In Section 4, the experimen-
tal setup for solving the energy management problem
with RL is described, for which the results will be
shown in section 5. Section 6 concludes the paper
and gives a prospect of potential future work.
2 BACKGROUND
2.1 Hybrid Electric Vehicles
The term ‘hybrid vehicle’ is classified by the UN
as vehicles which have at least two energy stor-
ages and two energy converters for locomotion (UN-
ECE Transport Division, 2005). Today, the most
widely spread implementation is the combination of
a conventional internal combustion engine (ICE) with
an electric machine. Biggest advantage of this com-
bination is the ability to exploit vehicle deceleration
for recuperation, meaning the conversion of braking
energy into electric energy for recharging the elec-
tric energy storage. With the EM assisting the ICE
in times of high loads up to 30% of fuel could be
saved, especially in urban environments, where the
efficiency of vehicles operated solely by ICE is typ-
ically rather low (Guzzella and Sciarretta, 2013).
If the combustion engine and the electric machine are
both directly connected to the driving axle of the hy-
brid vehicle they form a parallel power train structure
where the EM can be switched on and off as desired.
The basic architecture of parallel hybrid drive train
structures is shown in Figure 1.
EM
gearbox
rear axle
n
CRS
, trq
CRS
P
EM
m
Fuel
CE
rear wheels
Clutch
Figure 1: Structural scheme of a parallel mild hybrid.
Hybrid vehicles with a parallel power train are of-
ten designed as mild hybrids, meaning that the EM
has a comparatively low power output against the
ICE. In this case, the EM is mainly used for recuper-
ation of braking energy and short-term support of the
combustion engine in periods of high load. In con-
trast to plug-in hybrids, mild hybrids do not offer the
opportunity to charge the electric storage externally
and the entirety of the energy used for support of the
ICE has to be gained from recuperation. Deliberately,
purely electric driving with only the EM operated for
locomotion of the vehicle is not intended (Guzzella
and Sciarretta, 2013). Mild hybrids can be seen as
a compromise between vehicles operated by a single
combustion engine and full hybrids with the ability to
drive fully electric for long routes, saving costs in the
development and production of the vehicle as well as
operational costs for fuel and energy.
2.2 Operating Strategy
Mainly, the control of HEVs can be split into two
levels. The component level (low-level), which
controls the components of the driving unit with
traditional feedback-control procedures, and the
supervisory level (high-level) for monitoring and
control of any power flow within the vehicle. Latter
one will also process any kind of vehicle and driving
information (speed, torque, acceleration, slope), and
thus can be described as the energy management
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
62

system (EMS). Primary goal of the EMS is deriving
optimal control signals for the low-level in order to
achieve best possible energy efficiency (Onori et al.,
2016). The energy management is embedded in an
overall operating strategy of the vehicle which, next
to fuel saving, could also include any other aspects
like vehicle dynamics or driving comfort as well
as certain technical goals. For example, limitations
of the maximum battery power could be desired in
order to avoid damage or to extend the lifetime of the
component.
Most derivation processes for energy management
start with model-based simulations. Deriving an
optimal strategy can then be described as a multi-goal
optimization process. Various methods exist for
solving this problem. On the one hand, global
optimization methods like dynamic programming
(DP) (Kirschbaum et al., 2002) which offer the
chance to determine optimal solutions for any given
driving cycle. However, since these methods require
full knowledge of the route in advance and are
computationally very expensive, the application in
the vehicle for online control seams infeasible. In
practice DP mostly serves for academic validation
of other procedures. On the other hand there are
local optimization methods like the Equivalent
Consumption Minimization Strategy (ECMS) where
fuel and electric energy used for driving is balanced
through a weighting factor (Chasse and Sciarretta,
2011). Nevertheless, selection of an appropriate
factor requires further effort for optimization with
ECMS since it heavily depends on the state of the
route being driven and the habits of the driver.
Further details to traditional optimization methods
for operating strategies can be found in (Guzzella and
Sciarretta, 2013).
For adaptability towards different driver types,
more innovative approaches are required. Next to
stochastic dynamic programming shown in (Leroy
et al., 2012) and (Tate et al., 2008), machine learn-
ing and especially reinforcement learning offer good
concepts for the efficient inclusion of specific driving
and driver information into the optimization process
of operating strategies for hybrid vehicles.
2.3 Reinforcement Learning
The basic idea of reinforcement learning algorithms is
strongly geared towards how humans or animals learn
and can be described as a learning process by trial and
error. The interactive nature makes RL particularly
interesting for learning problems with no existing set
of structured and labeled training examples.
Figure 2: Scheme of the typical agent-environment-
interaction for reinforcement learning (Sutton and Barto,
2012).
The fundamental structure of any RL algorithm is
shown in Figure 2 and can be described as a structured
interaction of an agent with its environment. At every
discrete timestep t the agent is presented with a state
s
t
from the environment for which he must choose an
action a
t
. The agent determines his actions based on
an internal policy π which maps an action to every
observable state:
π : s ← a (1)
For every chosen action the agent receives a re-
ward r
t+1
and a new state s
t+1
. Goal of any RL al-
gorithm is for the agent to adjust his policy in such a
way that his return g
t
, which is given as the weighted
sum of the temporal rewards
g
t
=
∞
∑
k=0
γ
k
r
t+k+1
(2)
is maximized at any given timestep. The discount
factor γ ∈ [0, 1) indicates the relevance of future re-
wards. In general, the agents policy can be either
stochastic or deterministic, latter will further be de-
noted with µ. In order for the agent to learn an op-
timal policy π
∗
which maximizes his return in the
given environment, the problem statement has to ful-
fill the Markov-Property, meaning that at any point
of time all of the environments historic state infor-
mation is captured in the current state s
t
and so any
following state and future rewards solely depend on
s
t
and the agents chosen action a
t
. A process sat-
isfying the Markov-Property can be described as a
Markov-Decision-Process (MDP) (Puterman, 2010).
Since complete satisfaction of this condition for real-
world problems is often unfeasible, a good approxi-
mation of an MDP is often sufficient for the applica-
bility of reinforcement learning.
Different approaches exist for solving an MDP
with RL, one of which is the concept of Temporal-
Difference (TD) Learning. Here, the agent maintains
an estimate of the achievable return which can itera-
tively be updated based on the truth found in the ac-
tually experienced state sequences and the received
rewards during the interaction with the environment.
One proven way of solving an MDP with TD-methods
Deep Reinforcement Learning for Advanced Energy Management of Hybrid Electric Vehicles
63

Figure 3: Basic structure of the DDPG actor-critic agent. Actor with parameters θ
µ
, state s as input and action based on
deterministic policy µ as output. Critic taking both state and chosen action of the actor as input and giving out an according
Q-Value, based on parameters θ
Q
. Update signal for higher rewards for actor as policy gradient, derived with the chain-rule
of both networks (Timothy P. Lillicrap et al., 2015).
is Q-Learning where the agent estimates a Q-Value
for every possible action, indicating the achievable fu-
ture return when this action is chosen. After every
interaction with the environment, an iterative update
of the current estimation for the chosen action can be
made by
Q(s
t
, a
t
) ← Q(s
t
, a
t
) + α [ ˜y
t
− Q(s
t
, a
t
)] (3)
with
˜y
t
=
r
t+1
+ γ max
a
t+1
Q(s
t+1
, a
t+1
)
(4)
With a sufficiently small learning rate α, the iterative
updates of the agents estimations are proven to con-
verge towards the real Q-Values of the MDP. Knowl-
edge of the Q-Values automatically results in follow-
ing the optimal policy if the agent in every state picks
the action with the highest Q-Value:
π
∗
(s) = argmax
a
Q(s, a) (5)
which ultimately maximizes his return. Even
though Q-Learning has proven to be very effective
for rather small and low-dimensional control tasks,
the need for discrete state and actions spaces limits
the number of application options for real-world opti-
mization problems.
2.4 Deep Reinforcement Learning
Deep reinforcement learning, as a combination of
deep learning with artificial neural networks and the
interactive learning structure of RL, has gained much
attention in recent years. As the foundation of al-
most any major progress in artificial intelligence in
the past decade, neural networks offer the essentials
to make RL valuable for a whole new range of highdi-
mensional real-world optimization problems. Hence,
deep neural networks can be deployed as non-linear
function approximators with trainable parameters θ
Q
in the context of Q-learning, resulting in the Deep Q-
Network (DQN) algorithm (Volodymyr Mnih et al.,
2013). Instead of iteratively updating running esti-
mates of the actions Q-values, the DQN is trained to
output the correct values for any given state by mini-
mizing the loss:
L(θ
Q
) =
y
t
− Q(s
t
, a
t
| θ
Q
)
2
(6)
with
y
t
=
r
t+1
+ γ max
a
t+1
Q(s
t+1
, a
t+1
| θ
Q
0
)
(7)
For what was always believed to be inherently unsta-
ble, (Mnih et al., 2015) show effective learning of the
DQN by introducing two main features: training of
the network with uncorrelated minibatches of the past
- called experience replay - and deriving target val-
ues y
t
with a separate network with parameters θ
Q
0
,
called the target network. In this manner, a DQN-
agent could be trained to achieve human level per-
formance in many games of an Atari 2600 emulator
only receiving unprocessed pixels as state-input and
the raw score as a reward.
The processing of highdimensional state-vectors
can be seen as a significant advantage for many en-
gineering tasks where often data gathered from a
large number of sensors has to be filtered elaborately
for the use with conventional optimization methods.
However, for many control tasks even bigger advan-
tages are believed to arise from the use of continu-
ous control parameters in order to avoid quality lim-
iting discretization errors. Plain Deep-Q-Networks
do not offer the chance of continuous output param-
eters. Thus, numerous evolutions of DQN have been
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
64

proposed in the last years, mostly categorized as pol-
icy gradient algorithms like the Deep Deterministic
Policy Gradient (DDPG) (Timothy P. Lillicrap et al.,
2015) or Trust Region Policy Optimization (TRPO)
(John Schulman et al., 2015). A continuous variant of
DQN is proposed in (Shixiang Gu et al., 2016) with
the Normalized Advantage Function. Continuous pol-
icy gradient methods use an actor-critic architecture
where an actor represents a currently followed policy
with output of continuous action variables which are
then evaluated by a second part called the critic. In
case of DDPG both actor and critic are presented as
deep neural networks, where the actor performance
is evaluated through a deterministic policy gradient
(David Silver et al., 2014) derived from the critic as a
DQN. The DDPG architecture is shown in Figure 3.
3 REINFORCEMENT LEARNING
FOR HEV CALIBRATION
3.1 Related Work
Compared to traditional and most commonly used
methods for deriving efficient operating strategies in
the automotive industry like DP, ECMS or fuzzy ap-
proaches, machine learning and in particular rein-
forcement learning present new opportunities with
significant advantages. Most of all the agent would
not require any prior information about the course of
the route in order to decrease fuel consumption since
he is fully trained to do so with only current state in-
formation.
In (X. Lin et al., 2014) a RL agent is given control
over particular parameters of the control unit within
the model of a HEV. Given a discrete state consisting
of power demand, vehicle speed, and battery charg-
ing state the agent was able to determine a strategy
to regulate battery output voltage and gear transla-
tion resulting in fuel savings up to 42%. In (C. Liu
and Y. L. Murphey, 2014) the discrete state space of
the constrained optimization is extended with specific
trip information like the remaining traveling distance,
which made the operating strategy even more effi-
cient. In both cases traditional Q-learning methods
were used for optimization which require discretiza-
tion of the generally continuous state and control pa-
rameters within the vehicle.
Preliminary investigations (Patrick Wappler,
2016) have proven the high quality of the gained
solutions of classic RL algorithms. The discrete
representation of the results in a Q-table would also
allow a straight forward approach for the integration
in common energy management systems of HEV.
However, the well-known curse of dimensionality
exponentially increases the size of the table with in-
clusion of further variables which limits the problem
to rather small state and action spaces in order to deal
with restrictions concerning memory and computing
time. Additionally, without the use of approximation
or interpolation methods the agent is unable to value
any state he has not processed during training. With
severely different driving scenarios occuring in the
real world considering traffic or driving styles, the
derivation of a fully complete discrete representation
is unfeasible. A rough discretization excludes valu-
able information within the optimization problem
and limits the achievable fuel savings.
3.2 Problem Formulation
The central goal of the energy management is finding
a control signal action(t) for the minimization of the
fuel consumption m
Fuel
during a drive of time t
0
≤ t ≤
t
f
, expressed as the minimization of an integral value
J:
J =
Z
t
f
t
0
˙m
Fuel
(action(t), t)dt (8)
wherein ˙m
Fuel
describes the fuel mass flow rate.
The minimization of J is subject to physical limita-
tions concerning performance measures, limitations
of the energy storage and variance of the charging
state of the battery (SOC). Thus, the energy man-
agement optimization problem is a temporally limited
optimization problem with secondary and boundary
conditions (Onori et al., 2016).
3.2.1 Boundary Conditions
Unlike plug-in hybrids, mild hybrids can not be
charged externally so they must be operated in a
charge-conserving way. Hence a boundary condition
can be stated:
SOC(t
f
) = SOC
target
(9)
which also allows for comparison of different so-
lutions with an optimal solution found by dynamic
programming. A desired target value could be:
SOC
target
= SOC(t
0
) (10)
maintaining the initial charging state of the bat-
tery at the beginning of the driving cycle. How-
ever, for practical application a hard constraint does
not seem necessary and ranging the terminal charging
state SOC(t
f
) between threshold values is acceptable.
Deep Reinforcement Learning for Advanced Energy Management of Hybrid Electric Vehicles
65

With a sufficiently small range, a deviation to the tar-
get value does not lead to interference of the vehicles
functionality (Onori et al., 2016).
3.2.2 Secondary Conditions
Secondary conditions of the optimization problem
can be stated for the state variables of the HEV as well
as the control parameters. Limiting state variables
like the SOC and the battery temperature ϑ
bat
ensure
safe use of the components, operation in regions of
high efficiency and extended lifetime. Limitations of
the control variables arise from physical limits of ac-
tuators and maximum performance (or power output
P) of engines and battery.
Thus, it can be stated:
SOC
min
≤ SOC(t) ≤ SOC
max
,
P
bat,min
≤ P
bat
(t) ≤ P
bat,max
,
ϑ
bat,min
≤ ϑ
bat
(t) ≤ ϑ
bat,max
,
Trq
x,min
≤ Trq
x
(t) ≤ Trq
x,max
,
n
x,min
≤ n
x
(t) ≤ n
x,max
(11)
for
x = ICE, EM
where n and Trq denote rotational speeds and
torque of the EM and ICE. The notations (·)
min
and
(·)
max
represent the minimum and maximum of the
respective entries at every point of time.
4 REINFORCEMENT LEARNING
SETUP
The use of deep reinforcement learning requires the
statement of the problem as the typical interaction of
an agent with his environment. Concerning the energy
management problem of HEV, the agent can be cho-
sen to represent the control unit of the vehicle. Then
the environment can include any outside part of the
world containing information for the derivation of an
efficient operating strategy. Here the environment is
assembled by two models, one of the vehicle and one
of the driver.
4.1 Vehicle Model
The mild hybrid power train, which is used for the
vehicle model, is briefly described in section 2.2 and
shown in Figure 1. Both energy converters are located
on the crank shaft of the driving unit where the torque
is split according to the operating strategy and physi-
cal limitations. The ICE gets fuel from a fuel tank and
the EM is supplied with electric energy from a battery.
The same battery stores the recuperated energy from
vehicle deceleration, downhill driving or load point
shifting of the combustion engine.
Since targets concerning speed and acceleration
are specified by driving cycles, the vehicle model is
orientated backwards with power demands calculated
from the wheels to the driving unit with each inter-
mediate component modelled individually. Figure 4
shows the signal flow of the vehicle model as a block
diagram.
4.1.1 Vehicle Dynamics
With a predetermined speed v
veh
and slope δ
veh
from
the driving cycle and the vehicle parameters par
veh
,
the required power for the vehicle P
veh
can be deter-
mined by approximating the driving resistance caused
by rolling friction and aerodynamic drag (Guzzella
and Sciarretta, 2013):
P
veh
= f (v
veh
, δ
veh
, par
veh
) (12)
With the addition of the dynamic rolling radius of
the wheel r, the required torque Trq
whl
and the rota-
tional speed at the wheels n
whl
can be calculated to:
Trq
whl
=
P
veh
· r
v
veh
(13)
n
whl
=
v
veh
2π · r
(14)
4.1.2 Consumption Model
An analytical description of chemical processes
within the combustion engine is barely possible,
hence the fuel consumption of the ICE was modelled
empirically based on measured data from a power
train test bench. With input of the speed and torque
at the wheels, the selected gear G as well as the
electric power of the electric motor P
EM,el
(derived
by the chosen action of the agent), the model deter-
mines a fuel volume m
Fuel
consumed in a time span
of ∆t = 1s:
m
Fuel
= f (n
whl
, Trq
whl
, G, P
EM,el
) (15)
4.1.3 Electric Motor Model
The model of the EM determines the losses due to the
conversion between electric and mechanical power.
Based on the efficiency for a given crankshaft speed
n
crs
and the direction of the conversion, the empirical
model outputs the power after losses:
P
mech
= f (n
crs
, P
el
) (16)
P
el
= f (n
crs
, P
mech
) (17)
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
66
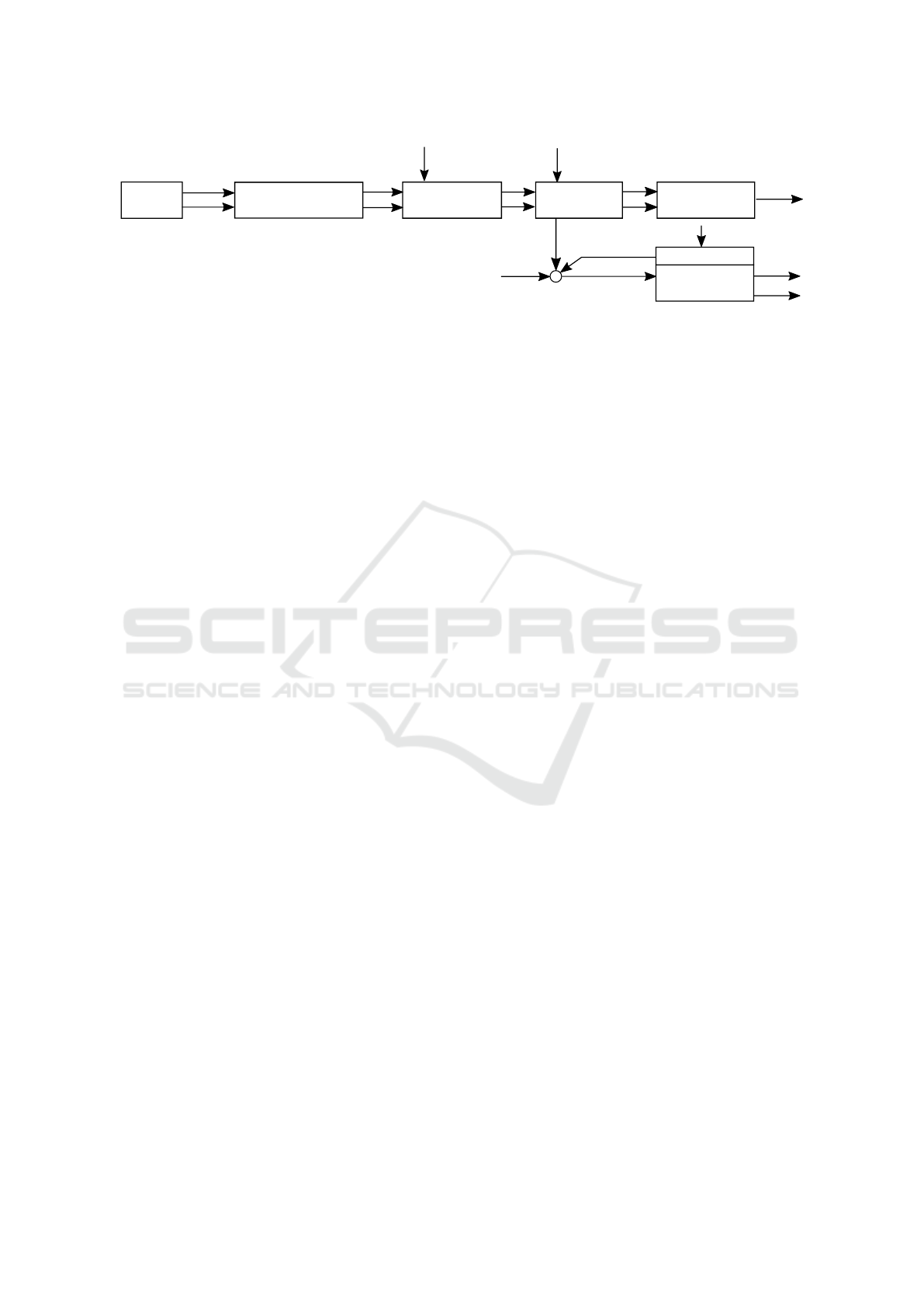
Driving
cycle
Motor
P
EM,el
P
aux
velocity
slope
Trq
crs
n
crs
Trq
ice
Gear
Trq
EM,target
m
Fuel
SOC
ϑ
bat
P
bat
ICE
Differential &
gearbox
Driving resistance
& wheel
Battery
Cooling
P
cool,el
Trq
whl
n
whl
n
ice
Control
Figure 4: Signal flow diagram of the HEV model.
4.1.4 Battery Model
For the calculation of change in charging state, the
battery was modelled as an equivalent two terminal
network with simplification of the underlying physics
of batteries. With neglection of any effect of tempera-
ture or loading cycles for the batteries capacitance, the
change of charging state was purely determined from
the previous state and any required power output from
the battery, composing of the power for operation of
the EM as well as any auxiliary users (e.g. the cooling
system):
SOC
t+1
= f (SOC
t
, P
bat
) (18)
For results shown in section 5.4, a temperature
model of the battery was implemented approximating
the change of temperature due to the power output and
the cooling control signal Cool
Control
:
ϑ
bat,t+1
= f (ϑ
bat,t
, P
bat
,Cool
Control
) (19)
The utilization of the cooling system causes an ad-
ditional power consumption P
cool,el
.
4.2 Driver Model
The driver is implemented as driving cycles imply-
ing specific velocity procedures the vehicle drives
through simulatively. Next to standard procedures
for the determination of emission levels, cycles gen-
erated by a stochastic driver model from (Liessner
et al., 2017) are used for a more realistic reproduc-
tion of real-world traffic scenarios. Hereby, diverse
characteristics can be considered within those cycles
like different market features, specific driving styles
and habits or traffic situations at different points dur-
ing the day. The tuning of operating strategies to-
wards special features in real-world driving scenarios
can be seen as a major benefit for customers concern-
ing fuel efficiency of their vehicles since it can be as-
sumed that e.g. an operating strategy derived with eu-
ropean driving data will not work as efficient in India
or China.
4.3 States, Actions and Reward
4.3.1 States
At each timestep during simulative driving the envi-
ronment provides a state vector for the agent consti-
tuting the current internal state of the vehicle. Here,
the state vector is defined by:
s
t
= (n
whl
, M
whl
, SOC, ϑ
bat
, G) (20)
In the case of the underlying vehicle model not
taking into account the battery temperature and the
according power limit, ϑ
bat
can be rejected from the
state vector. In this form the environmental state com-
plies with the Markov-Property in terms of any fol-
lowing state of the environment (vehicle model) being
only dependent on the current state and the chosen ac-
tion by the agent. Hence reinforcement learning can
be utilized to solve the underlying control problem.
4.3.2 Actions
For any given state the agent has to choose an action
which he considers optimal for the maximization of
his return. For the energy management problem ac-
tions can include any parameterizable metric with an
effect on fuel and energy efficiency. Commonly pa-
rameterized metrics in the optimization of operating
strategies are the split of torque between the electric
motor and the combustion engine, the choice of the
gear or the management of the battery temperature.
Here we only consider the choice of power output
for the electric motor as an action controlled by the
RL agent. Choice of gear and temperature regula-
tion are implemented as heuristics. As mentioned,
the electric motor is subject to multiple restrictions
concerning the maximum possible power output. Not
only is this limited by the current crankshaft speed
but also - if considered by the model - by the maxi-
mum power output of the battery regarding its temper-
ature. In contrast to discrete Q-tables, where the use
of certain actions in specific states can be restricted
by assigning extremely low Q-values, a continuous
Deep Reinforcement Learning for Advanced Energy Management of Hybrid Electric Vehicles
67

output of neural networks can hardly be limited with-
out any additional feedback signal which the network
can learn to cope with. Hence the selectable action of
the agent was implemented as a percent value of the
current maximally applicable torque with the output
layer of the neural network as a tanh-layer restricting
the action to a
t
∈ [−1, 1]. The applicable power of the
electric motor is then determined by:
P
EM
=
(
a
t
· P
EM,max
f or a
t
≥ 0
a
t
· P
EM,min
f or a
t
< 0
(21)
where the agent can choose to operate the EM ei-
ther as a motor or a generator respectively by choos-
ing positive or negative action values.
4.3.3 Reward
Since the main goal of the operating strategy is min-
imizing fuel consumption but the RL agent aims at
maximizing his return, a common practice is to state
the reward with a negative sign. Here the agents re-
ward based on his selected action is defined as the
negative total energy usage per timestep by:
r
t
= −(E
che
+ κE
el
) (22)
with
E
che
= m
Fuel
· ρ
Fuel
· H
Fuel
(23)
and
E
el
= P
bat
· ∆t (24)
where the agent not only gets incentivized to min-
imize fuel consumption but to do so with the least
amount of electric energy as possible. Thereby E
el
is weighted by a factor κ = f (SOC) which rates the
cost of electric energy proportionally to the deviation
of the SOC to a target value SOC
target
. In doing so, the
agent should learn to balance his SOC over the course
of a driving cycle as described in section 3.2.1.
4.4 Training
With the stated RL specific formulation, a DDPG
algorithm was implemented for solving the energy
management problem. With a lower computational
cost than TRPO and a straight forward implementa-
tion, DDPG has proven its usability and sample ef-
ficiency in other implementations (Duan Yan et al.,
2016). Additionally, the actor critic architecture of-
fers a good approach for possible application in real-
world vehicle-hardware with rather low computa-
tional capabilities, since the resulting operating strat-
egy is captured in a single neural network.
Training was conducted for one specific driving
cycle which could include any type of information
about driving styles or traffic situations. The current
operating strategy was evaluated every 5 episodes on
that specific cycle to track the learning progress. In
training episodes however, as mentioned, the agent
was confronted with a unique stochastic cycle based
on the original one in order to prevent the strategy
from overfitting to a specific velocity procedure. At
the same time, the length of the stochastic cycles
was varied in every episode. In order to increase the
amount of possible states which the network is con-
fronted with during training, the initial values of the
network were varied each training episode on a ran-
dom basis and within defined bounds. For evaluation
the SOC and ϑ
bat
were always initialized to 50% and
20
◦
C in order to the track learning progress.
For general exploration of the state space, as
in (Timothy P. Lillicrap et al., 2015), an Ornstein-
Uhlenbeck-Process (Borodin and Salminen, 1996)
was used for adding noise to the chosen actions of
the agent. The exploration noise was slowly decayed
over the first 1000 training episodes.
The training procedure of DDPG is shown as
pseudocode in algorithm 1.
Algorithm 1: Pseudocode for DDPG.
1: initialize networks
2: initialize replay buffer
3: for episode = 1,M do
4: initialize exploration process
5: observe initial state s
0
6: for t=1,T do
7: choose action a
t
with actor and add noise
8: execute a
t
9: observe r
t+1
and s
t+1
10: store [s
t
, a
t
, r
t+1
, s
t+1
] in buffer
11: choose minibatch from buffer
12: update critic with loss L from minibatch
13: update actor with policy gradient
14: update target networks
4.5 Hyperparameters
Similar to the original architecture, both actor and
critic were implemented as deep neural networks with
2 hidden layers each with 400 and 300 neurons and
Rectified-Linear-Unit activation. The actor receives
a standardized state vector and outputs a continuous
action as described. The critic additionally takes in
the actions into the second layer of the network and
outputs a continuous Q-Value through linear activa-
tion. An Adam-optimizer was chosen for the update-
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
68
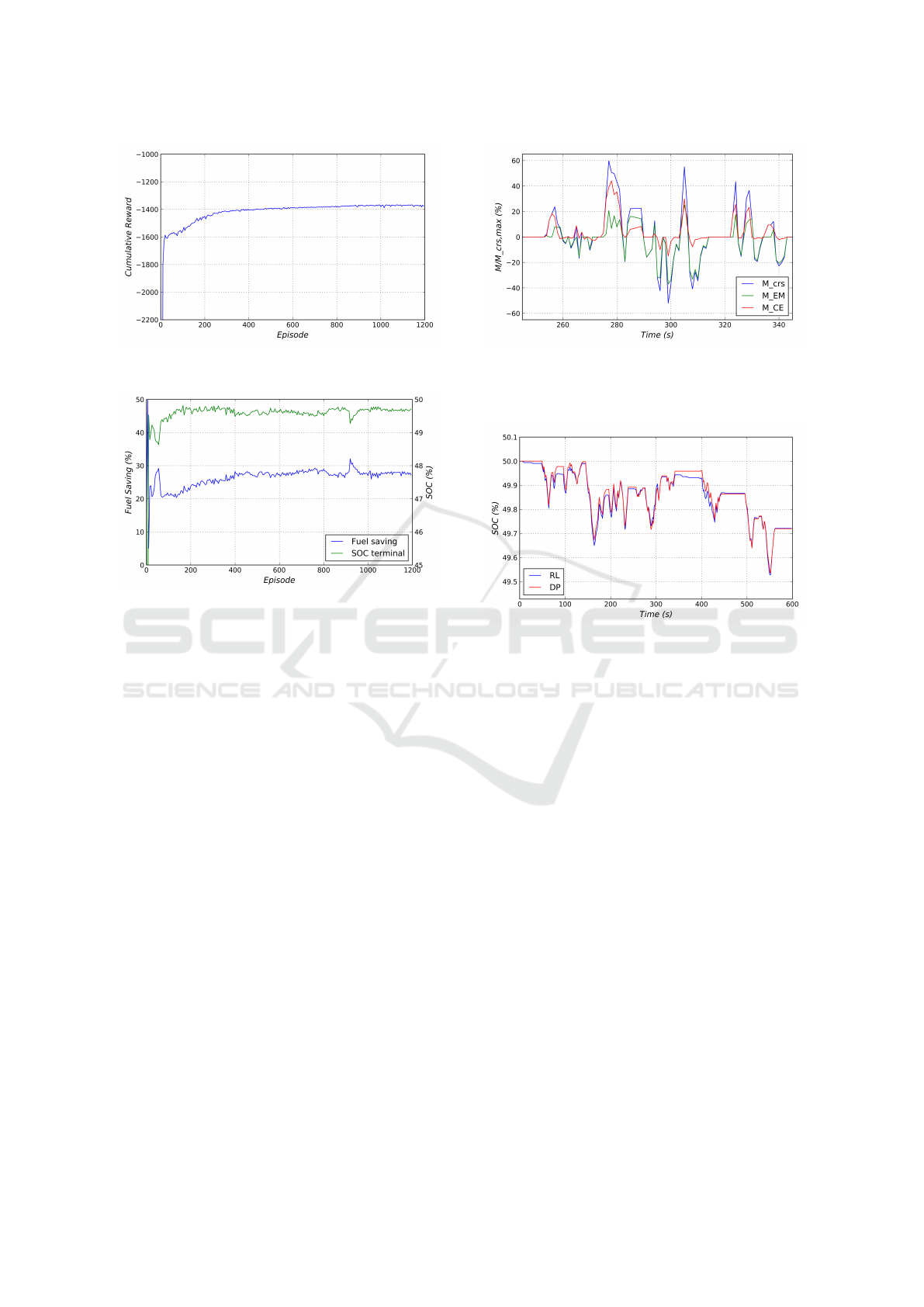
Figure 5: Cumulative reward (return) of the agent during
training process for the New-York-City-Cycle.
Figure 6: Fuel saving in % compared to driving solely with
the combustion engine (blue) and terminal battery charging
state (green) during the training process for the New-York-
City-Cycle.
process of the neural networks with a learning rate of
10
−5
for the critic and 10
−4
for the actor. The replay
buffer for sampling minibatches was initialized to a
size of 10
5
where in every timestep a minibatch size
of 32 was sampled to update the critic network.
For the training process a discount factor of γ = 0
was chosen, thus the agent optimized his strategy only
towards local rewards. However, since the reward
function contains a dynamic weighting factor depen-
dent on the current charging state, the agent has turned
out to adapt his strategy rather long-sighted. That way
significantly better results were achieved compared to
discounts γ > 0.
5 RESULTS
5.1 Learning
Figure 5 and 6 show exemplary training progress
for simulative driving of the New-York-City-Cycle
(NYCC), a characteristic cycle for low speed city
driving with many start-stop maneuvers. As shown,
the agent continuously increases his cumulative re-
Figure 7: Excerpt of the split of overall torque (blue) be-
tween the combustion engine (red) and the electric mo-
tor (green) for the New-York-City-Cycle, controlled by the
fully trained agent.
Figure 8: Comparison of battery loading trajectories for the
New-York-City-Cycle with the strategy learned by the RL
agent (blue) and the optimal strategy derived by Dynamic
Programming (red).
ward - the return - with progressive training. In do-
ing so, according to the reward function, the resulting
energy consumption is decreased consistently with a
constant fuel saving of over 20% compared to driv-
ing with the combustion engine only, established very
early in the training process. With the resulting bat-
tery charge at the terminal state of an episode very
close to the initial value of 50%, the SOC can be
described as balanced. In a low speed environment
where the rather low-powered electric motor can be
used very effectively, a positive deviation of the bat-
tery charge throughout the cycle can well be expected
for any efficient operating strategy. Since the agent
did not have any hard constraint towards the charging
state but was only implicitly incentivized through the
reward function, he is free to make any compromise
between the use of chemical or electric energy which
he considers most efficient.
Figure 7 shows an excerpt from the resulting strat-
egy for the NYCC in terms of split of torque between
the combustion engine and the electric motor which
the agent establishes with the choice of his actions. As
shown, the agent fully learns to use moments of vehi-
Deep Reinforcement Learning for Advanced Energy Management of Hybrid Electric Vehicles
69
cle deceleration for recharging the battery with recu-
perational energy by choosing actions a < 0 which
runs the electric motor in generator-mode. Mention-
able is that after 20 episodes of training the level of
this behavior is already nearly as sophisticated as af-
ter 1000 episodes of simulative driving.
It is recalled that the results for purely determin-
istic cycles only serve evaluation purposes. Since the
agent is trained with random cycles similar to the one
he is being evaluated on, he is able to deal with high
amounts of stochasticity concerning the velocity pro-
file of the drive and will control the electric motor just
as efficient. Due to the lack of space this can not be
fully presented here and will be briefly covered in sec-
tion 5.3.
In general, training the agent for a variety of dif-
ferent driving cycles is exceptionally stable. For driv-
ing profiles including rather high velocity and accel-
eration rates the learning rate of the actor network had
to be adjusted occasionally, since the unavoidable in-
crease of the reward magnitude through higher mo-
mentary fuel consumptions leads to bigger gradients
in the beginning of the training, where the neural net-
works are initialized with outputs close to zero and
the loss increases accordingly. Clipping the rewards
or gradients to certain maximum values would be a
considerable option to avoid this, though useful infor-
mation about the fuel consumption might be excluded
at a later point in the training.
5.2 Quality Analysis
For analyzing the quality of the operating strategy
learned by the agent, a comparison was made to a
strategy derived by dynamic programming with dis-
crete state and action spaces. With full knowledge
of the cycle in advance, the result of DP can be seen
as the globally optimal solution even though a small
error will be unavoidable through the use of discrete
parameters.
Table 1: Comparison of fuel savings for the strategy derived
by the RL agent and a global optimum computed with DP
in contrast to driving with ICE only.
Driving Cycle RL DP ∆
NYCC 28.6% 29.5% 0.9%
WLTP 16.0% 16.3% 0.3%
US06 10.8% 11.2% 0.4%
FTP75 20.1% 20.7% 0.6%
Table 1 shows the resulting fuel savings for 4 dif-
ferent velocity profiles typically used in calibration
and certification processes. The DP results are based
on the terminal SOC of the RL strategy in order to as-
sure comparability. As seen, only small deviations oc-
cur, where the optimal strategy achieves less than 1%
more savings in fuel which makes the strategy learned
by the agent nearly-optimal. A comparison of both
battery charging trajectories resulting from the operat-
ing strategy for the NYCC is shown in Figure 8, con-
firming that the agent’s strategy converges towards a
global optimum and does not get stuck in a poor local
optimum throughout the training process. In contrast
to DP, the RL agent does not need any prior informa-
tion about the driving route and he is trained to control
the EM optimally with only momentary state infor-
mation provided by the vehicle environment. A local
strategy optimization with nearly globally optimal so-
lutions can be seen as a major advantage of deep rein-
forcement learning over any other traditional method
for the derivation of operating strategies for HEVs.
5.3 Stochastic Cycles
As mentioned, in every episode of the training process
the agent is confronted with a different stochastic ve-
locity profile with the same characteristics concerning
speed and acceleration as the one he will be evalu-
ated on. Next to preventing overfitting, this is mainly
aimed at increasing the agent’s ability to general-
ize his strategy towards potentially unknown states
and driving profiles. Where traditional RL methods
with discrete parameters require tedious approxima-
tion methods, generalizing knowledge is a major ad-
vantage of deep RL obtained through the use of neural
networks.
Table 2: Comparison of a strategy trained with stochastic
velocity profiles and the other trained solely deterministi-
cally. Results are shown as the deviation of fuel saving in
% compared to a global optimal solution computed by dy-
namic programming.
Driving Cycle Stochastic Deterministic
NYCC 1.6% 1.5%
Rand
NYCC,1
0.95% 3.1%
Rand
NYCC,2
1.5% 6.6%
Rand
NYCC,3
1.7% 2.5%
Rand
NYCC,4
1.4% 3.1%
Rand
NYCC,5
1.6% 3.2%
Table 2 shows a comparison of two strategies, one
trained with stochastic cycles based on the NYCC,
the other trained purely with the deterministic NYCC
which was repeatedly driven through simulatively.
Where the deterministically derived strategy performs
good on the original NYCC, it is shown that for any
other stochastic velocity profile similar to the origi-
nal NYCC the strategy performs significantly worse
which clearly indicates overfitting. The stochastically
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
70

Figure 9: Battery temperature relative to the threshold for
power limitation (green) together with the control of cool-
ing power (blue) for simulative driving of a 5.000s long
stochastic cycle based on NYCC with the operating strat-
egy learned by the agent.
trained strategy in contrast shows constantly good
results for any driven route similar to the original
NYCC with a deviation to the global optimal solution
of only 0.9 − 1.7%. Additionally, stochastic cycles
could include any type of further information about
driving habits or traffic scenarios which neural net-
works could easily take into account for the operating
strategy. This results in a much more accurate illustra-
tion of realistic traffic potentially leading to increased
fuel savings and emission reduction in the actual oper-
ation of the vehicle rather than deriving approximate
values on a test bench which could hardly be achieved
in the real-world.
5.4 Inclusion of Temperature
Information
As mentioned, for this paper a temperature approx-
imation of the battery was included into the vehicle
model combined with a power restriction to prevent
damage from overheating. Additionally, a cooling
mechanism of the battery was implemented with a
heuristic used for control. Figure 9 shows an exem-
plary development of the battery temperature for sim-
ulative driving of a 5000 s stochastic cycle, which the
agent has optimized his strategy for. As it shows, the
agent has learned to control the EM in such a man-
ner that the temperature level of the battery remains
below a threshold value over which the maximum
power output of the battery would be restricted and
the agent could not use the full potential of the elec-
tric motor. Additionally, a clear tendency can be seen
to keep the temperature level close to the threshold
level of the cooling heuristic, around 91%, in order to
decrease the additional use of battery power for the
cooling system. With the additional boundary con-
dition implemented implicitly into the vehicle model
and the agent not receiving any explicit information
except the resulting reward based solely on the en-
ergy consumption, the agent still found nearly optimal
solutions to the energy management problem. Here
the major potential of deep reinforcement learning
can be seen compared to traditional methods for the
derivation of operating strategies with discrete vari-
ables as additional optimization goals can be imple-
mented into the training process without any signifi-
cant extra cost or loss in quality.
6 CONCLUSION
The energy management of hybrid electric vehicles
poses major challenges for automobile manufacturers
where traditional approaches show many deficiencies
in processing additional information concerning real-
world driving scenarios. In this paper, a deep rein-
forcement learning framework has been derived that
offers great potential for solving many of those prob-
lems. It has been shown that a deep RL agent is ca-
pable of achieving nearly-optimal fuel consumption
results with a locally trained strategy which can be ap-
plied online in the vehicle. In contrast to dynamic pro-
gramming, no prior knowledge of the driving route is
necessary and the training with stochastic driving cy-
cles allows for greater generalization to variously dif-
ferent velocity profiles. Additionally, deep reinforce-
ment learning allows the efficient inclusion of further
optimization criteria.
Another advantage can be seen in the potential
adaptability of the agent which would be able to learn
from real driving data even during direct usage of the
vehicle. A conceivable result would be an intelli-
gent energy management system constantly adapting
to specific driving habits, typically driven routes or
other desirable characteristics of the vehicle owner or
driver.
Future work can build up on the presented re-
sults and the arising potential for further improve-
ment. This includes a broader examination of the
agents capabilities of online generalization and adapt-
ability, simulating alternating traffic scenarios or dif-
ferent driving habits while constantly updating the
agents strategy. Furthermore, a big field of research
arises from the integration of additional vehicle or fu-
ture route information, e.g. from navigation data. A
predictive strategy offers great potential for further re-
duction of fuel consumption and emission-levels.
In a next step, the algorithm could be applied on
a power train test bench for assessing and refining the
results learned with the simulation model. Similarly,
the transfer into the real vehicle would be feasible.
Deep Reinforcement Learning for Advanced Energy Management of Hybrid Electric Vehicles
71

REFERENCES
Borodin, A. N. and Salminen, P. (1996). Ornstein-
uhlenbeck process. In Borodin, A. N. and Salminen,
P., editors, Handbook of Brownian Motion — Facts
and Formulae, pages 412–448. Birkh
¨
auser Basel,
Basel.
C. Liu and Y. L. Murphey (2014). Power management
for plug-in hybrid electric vehicles using reinforce-
ment learning with trip information. In 2014 IEEE
Transportation Electrification Conference and Expo
(ITEC), pages 1–6.
Chae, H., Kang, C. M., Kim, B., Kim, J., Chung, C. C., and
Choi, J. W. (2017). Autonomous braking system via
deep reinforcement learning. CoRR, abs/1702.02302.
Chasse, A. and Sciarretta, A. (2011). Supervisory control
of hybrid powertrains: An experimental benchmark of
offline optimization and online energy management.
Control Engineering Practice, 19(11):1253–1265.
David Silver, Guy Lever, Nicolas Heess, Thomas Degris,
Daan Wierstra, and Martin Riedmiller (2014). Deter-
ministic policy gradient algorithms. In Tony Jebara
and Eric P. Xing, editors, Proceedings of the 31st In-
ternational Conference on Machine Learning (ICML-
14), pages 387–395. JMLR Workshop and Conference
Proceedings.
Duan Yan, Chen Xi, Houthooft Rein, Schulman John, and
Abbeel Pieter (2016). Benchmarking deep reinforce-
ment learning for continuous control. International
Conference on Machine Learning, 2016:1329–1338.
European Commission (2017). Draft regulation: real-
driving emissions in the euro 6 regulation on emis-
sions from light passenger and commercial vehicles.
Guzzella, L. and Sciarretta, A. (2013). Vehicle propulsion
systems: Introduction to modeling and optimization.
Springer, Heidelberg, 3rd ed. edition.
John Schulman, Sergey Levine, Philipp Moritz,
Michael I. Jordan, and Pieter Abbeel (2015).
Trust region policy optimization. CoRR.
Kirschbaum, F., Back, M., and Hart, M. (2002). Determina-
tion of the fuel-optimal trajectory for a vehicle along a
known route. IFAC Proceedings Volumes, 35(1):235–
239.
Leroy, T., Malaize, J., and Corde, G. (2012). Towards
real-time optimal energy management of hev pow-
ertrains using stochastic dynamic programming. In
2012 IEEE Vehicle Power and Propulsion Conference,
pages 383–388. IEEE.
Liessner, R., Dietermann, A., B
¨
aker, B., and L
¨
upkes, K.
(2017). Generation of replacement vehicle speed cy-
cles based on extensive customer data by means of
markov models and threshold accepting. SAE Inter-
national Journal of Alternative Powertrains, 6(1).
Mirzaei, H. and Givargis, T. (2017). Fine-grained ac-
celeration control for autonomous intersection man-
agement using deep reinforcement learning. CoRR,
abs/1705.10432.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Ve-
ness, J., Bellemare, M. G., Graves, A., Riedmiller,
M., Fidjeland, A. K., Ostrovski, G., Petersen, S.,
Beattie, C., Sadik, A., Antonoglou, I., King, H., Ku-
maran, D., Wierstra, D., Legg, S., and Hassabis, D.
(2015). Human-level control through deep reinforce-
ment learning. Nature, 518(7540):529–533.
Onori, S., Serrao, L., and Rizzoni, G. (op. 2016). Hy-
brid electric vehicles: Energy management strategies.
Springer, London.
Patrick Wappler (2016). Applikation von hybridfahrzeu-
gen auf basis k
¨
unstlicher intelligenz. Master’s the-
sis, Technische Universit
¨
at Dresden, Lehrstuhl f
¨
ur
Fahrzeugmechatronik.
Puterman, M. L. (dr. 2010). Markov decision processes:
Discrete stochastic dynamic programming. Wiley Se-
ries in Probability and Statistics. John Wiley & Sons,
Hoboken, [dodr.] edition.
Shixiang Gu, Timothy P. Lillicrap, Ilya Sutskever,
and Sergey Levine (2016). Continuous deep q-
learning with model-based acceleration. CoRR,
abs/1603.00748.
Sutton, R. S. and Barto, A. G. (2012). Introduction to rein-
forcement learning. MIT Press, 2 edition.
Tate, E. D., Grizzle, J. W., and Peng, H. (2008). Shortest
path stochastic control for hybrid electric vehicles. In-
ternational Journal of Robust and Nonlinear Control,
18(14):1409–1429.
Timothy P. Lillicrap, Jonathan J. Hunt, Alexander Pritzel,
Nicolas Heess, Tom Erez, Yuval Tassa, David Silver,
and Daan Wierstra (2015). Continuous control with
deep reinforcement learning. CoRR, abs/1509.02971.
UNECE Transport Division (2005). Vehicle regulations:
Regulation no. 101, revision 2,.
Volodymyr Mnih, Koray Kavukcuoglu, David Silver,
Alex Graves, Ioannis Antonoglou, Daan Wierstra, and
Martin Riedmiller (2013). Playing atari with deep re-
inforcement learning. In NIPS Deep Learning Work-
shop.
X. Lin, Y. Wang, P. Bogdan, N. Chang, and M. Pedram
(2014). Reinforcement learning based power manage-
ment for hybrid electric vehicles. In 2014 IEEE/ACM
International Conference on Computer-Aided Design
(ICCAD), pages 33–38.
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
72
