
People Counting based on Kinect Depth Data
Rabah Iguernaissi, Djamal Merad and Pierre Drap
Aix-Marseille University, LSIS - UMR CNRS 7296, 163 Avenue of Luminy, 13288 Cedex 9, Marseille, France
Keywords:
People Counting, Depth Data, Intelligent Sensor, People Detection.
Abstract:
The people’s counting is one of the most important parts in the design of any system for behavioral analysis. It
is used to measure and manage people’s flow within zones with restricted attendance. In this work, we propose
a counting strategy for counting the number of people entering and leaving a given closed area. Our counting
method is based on the use of depth map obtained from a Kinect sensor installed in a zenithal position with
respect to the motion direction. It is used to count the number of people crossing a virtual line of interest (LOI).
The proposed method is based on the use of two main modules a people detection module that is used to detect
individuals crossing the LOI and a tracking module that is used to track detected individuals to determine the
direction of their motions. The people detection is based on the design of a smart sensor that is used with both
the grayscale image that represents depth changes and the binary image that represents foreground objects
within the depth map to detect and localize individuals. Then, these individuals are tracked by the second
module to determine the direction of their motions.
1 INTRODUCTION
The study of people’s behavior is one of the most im-
portant purposes in the design of several computer vi-
sion applications. The design of such systems is gen-
erally motivated by either the automatization or the
improvement of some procedures that relay on human
operators. One of the most studied aspects is the de-
sign of automatic counting systems that are able to
either count the number of individuals present within
a region of interest (ROI systems) or the number of
individuals crossing a line of interest (LOI systems).
People’s counting systems are used to obtain in-
formation about people flow in closed areas such as
stores, metros, and malls. These information may be
used for several purposes either statistical to improve
the monitoring of some areas such as stores by adapt-
ing the stuff during peak hours or for safety purpose
in surfaces with limited number of attendance by pro-
ducing a count that gives an alert whenever the maxi-
mal permitted number of individuals is reached.
In the last few years, many applications that in-
tegrate computer vision techniques were proposed to
realize an automatic counting system that is able to
count the number of individuals crossing a line of in-
terest based on the use of either classical RGB cam-
eras or depth sensors. In most works, the sensors are
installed in a zenithal position with respect to the mo-
tion direction to reduce the occurrence of occlusions.
In this work, our objective is the design of a count-
ing system that may be used to determine the num-
ber of customers entering or leaving a sale area. For
this, we proposed a system that uses depth map from
a Kinect sensor to count the number of individuals
crossing a virtual line of interest within the Kinect
field of view and determine the direction of their mo-
tion to decide whether detected individuals are enter-
ing or leaving the store.
The rest of this paper is organized in three main
parts. The first part is dedicated to the study of some
related works that were published in this field. In the
second part, our counting strategy is presented and the
last section is dedicated to the presentation of some
results. This paper ends up with a conclusion.
2 RELATED WORKS
The counting of people is the basic part of any sys-
tem that is designed for crowd monitoring and atten-
dance control either for statistical, marketing, or secu-
rity purposes. Due to its importance many researches
were done in this field. The main objective for all
these works is the proposal of algorithms that enable
the automatic counting of people either crossing a vir-
tual line or determining the number of people who are
present in the studied scene at given time.
364
Iguernaissi, R., Merad, D. and Drap, P.
People Counting based on Kinect Depth Data.
DOI: 10.5220/0006585703640370
In Proceedings of the 7th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2018), pages 364-370
ISBN: 978-989-758-276-9
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Most proposed methods for pedestrians counting
are based on two main steps. The first step is gener-
ally the people detection step which consists in detect-
ing moving objects and separating them into single
persons. This is done based on classical algorithms
for motion detection such as background subtraction
and a convenient segmentation strategy such as con-
nected component analysis, K means,.... The second
step is the tracking step in which detected individuals
are tracked either to determine the direction of motion
(entering or leaving a given surface) or just to avoid
recounting the same individual several time while he
is moving within the studied scene.
Depending on the counting objective the proposed
methods for people counting can be classified into
two main categories: The LOI counting methods and
the ROI counting methods. The LOI methods are
designed to estimate the number of people crossing
a virtual Line Of Interest (LOI) within the studied
scene. For this category we can mention (Ma and
Chan, 2013), (Del Pizzo et al., 2016), and (Cong et al.,
2009). The second category which are the ROI meth-
ods are designed for crowd estimation to estimate the
number of people present within a Region Of Interest
(ROI) in the studied scene at given time. For meth-
ods adopting this approach we may cite (Anti
´
c et al.,
2009), (Bondi et al., 2014).
One of the most used approaches for people’s
counting is based on motion analysis across a virtual
LOI to detect and count persons. In this approach, for
counting the number of people crossing a virtual LOI
in video stream Ma and Chan (Ma and Chan, 2013)
proposed a method that is based on integer program-
ming. The algorithm is designed to estimate the in-
stantaneous people’s count using local-level features
and regression. The proposed method is based on
constructing an image slice from the temporal slice
image where each column in the slice image corre-
sponds to the line of interest at given time t. Then, the
resulting region of interest is studied to detect blobs
that corresponds to crowd segment crossing the LOI
using local HOG features. Finally, the count of people
in each crowd segment is estimated by Bayesian Pois-
son regression. In contrast to this Cong et al. (Cong
et al., 2009) designed a method that is based on flow
velocity field estimation. In this algorithm the first
step consists in detecting the velocity field on the LOI
which is segmented according to the moving direc-
tion. Then, a dynamic mosaic is used to construct
blobs that in their turn will be used to estimate the
number of people based on regression on their area
and number of edges.
Another common approach consists in detecting
moving individuals or a part of their bodies (generally
heads) in either classical RGB cameras or depth sen-
sors. Then, tracking these individuals to count peo-
ple crossing a virtual LOI or people present within a
ROI. Most of methods in this category starts by de-
tecting moving objects in the studied scene based on
classical methods used for motion detection such as
the background subtraction (Anti
´
c et al., 2009) and
(Bondi et al., 2014) or the frame differencing in (Chen
et al., 2012). The second step consists in segmenting
the detected blobs to detected individual (Anti
´
c et al.,
2009) and (Chen et al., 2012) or their heads such as
in (Fu et al., 2014), (Bondi et al., 2014), (Van Ooster-
hout et al., 2011), and (Zhang et al., 2012).
In this context, Antic et al. (Anti
´
c et al., 2009)
proposed a counting method in video stream. This
method is based on three basic steps. The first step
consists in the detection of foreground object using a
classical background subtraction method. In the sec-
ond step, the foreground is clustered by K-means into
the maximum possible number of clusters which is
supposed to be the number of persons who are present
in the studied ROI. The third and last step consists
in the tracking of detected individuals from the pre-
vious step based on a greedy solution to a dynamic
assignment problem between clusters in consecutive
frames. Then, the end points of tracks are used to
increment the entrance or the exit counter. In the
same manner, Chen et al. (Chen et al., 2012) pro-
posed a method in which the motion detection is done
by frame differencing and the blobs segmentation to
single individuals is done by connected component
analysis. Then, tracking is done by bounding boxes
intersection-check technique by supposing that peo-
ple in crowd are moving slowly.
For the same purpose many methods were pro-
posed to detect heads of individuals who are present
in the studied ROI. Most of these algorithms exploit
the fact that a head is the closest part of human body to
a ceiling depth sensor that is installed in a zenithal po-
sition with respect to the studied scene. Among these
methods, we may mention Zhang et al. (Zhang et al.,
2012) who proposed a method based on a water fill-
ing algorithm. The proposed method consists in the
detection of local minimums of water drops needed to
fill a depth map which is obtained by a Kinect sensor.
These local minimums are supposed to be heads as
they are the closest parts to the Kinect sensor which
is installed in a zenithal position with respect to the
ROI. In the same context, Bondi et al. (Bondi et al.,
2014) used depth data from a stereo system to localize
heads in the studied scene by localizing the local min-
imum in each detected blob representing a foreground
object. These foreground blobs are obtained by as-
sociating a classical background subtraction method
People Counting based on Kinect Depth Data
365
with a simple edge detection. The association of this
head detection technique with a simple tracking strat-
egy allow the counting of people who are present in
the ROI.
Another category of methods that are dealing with
the problem of pedestrian’s counting are methods
based on the design of smart sensor that interprets
data from an RGB camera or depth sensor to count
people within a ROI. For this category, Del Pizzo et
al. (Del Pizzo et al., 2015) proposed a method for
people counting that is based on two main steps. The
first step consists in simple background subtraction
method that is used to detect foreground objects in the
studied scene. Then, the second step consist in people
counting based on the use of smart sensor that is able
to interpret the results of foreground detection. The
used sensor has a rectangular shape which is divided
into several cells that are activated whenever the num-
ber of foreground pixels within the cell is larger than
a threshold. The evaluation of the activation sequence
allows the detection and the counting of people mov-
ing within the ROI. In (Del Pizzo et al., 2016), the
same basic idea of using rectangular sensor that is di-
vided into several cells was adopted to detect people.
This basic idea is associated to a method similar to
the working of incremental rotary encodes (Billings-
ley et al., 2008) to detect the motion direction. The
evaluation of the activation sequence associated to the
direction of motion enables the counting of people
crossing a virtual LOI. In the same context, Baran-
diaran et al. (Barandiaran et al., 2008) proposed a
method that is based on the use of a fixed number of
equidistant virtual lines that are placed orthogonally
to the expected motion direction in the ROI. Then,
the people counting for each virtual line is done by
detecting the non-zero intervals in the difference im-
age between current and previous frame at the level of
the virtual line.
The study of the state of the art gave us a gen-
eral idea about the methods adopted for counting peo-
ple either crossing a LOI or present within a ROI
at a given time. Most recent methods are exploiting
data from either an RGB camera or depth sensor that
are installed in a zenithal position with respect to the
studied scene. This tendency is due to the fact that
the zenithal position of the used sensor reduces dras-
tically the recurrence of occlusions which is one of
the major issues in the field. But, in the other hand,
the segmentation and tracking problems persist as the
zenithal position of camera reduces the data that may
be used to differentiate different individuals.
In this paper, we adopted a method that is based
on exploiting depth data from a Kinect sensor that is
installed in a zenithal position with respect to the stud-
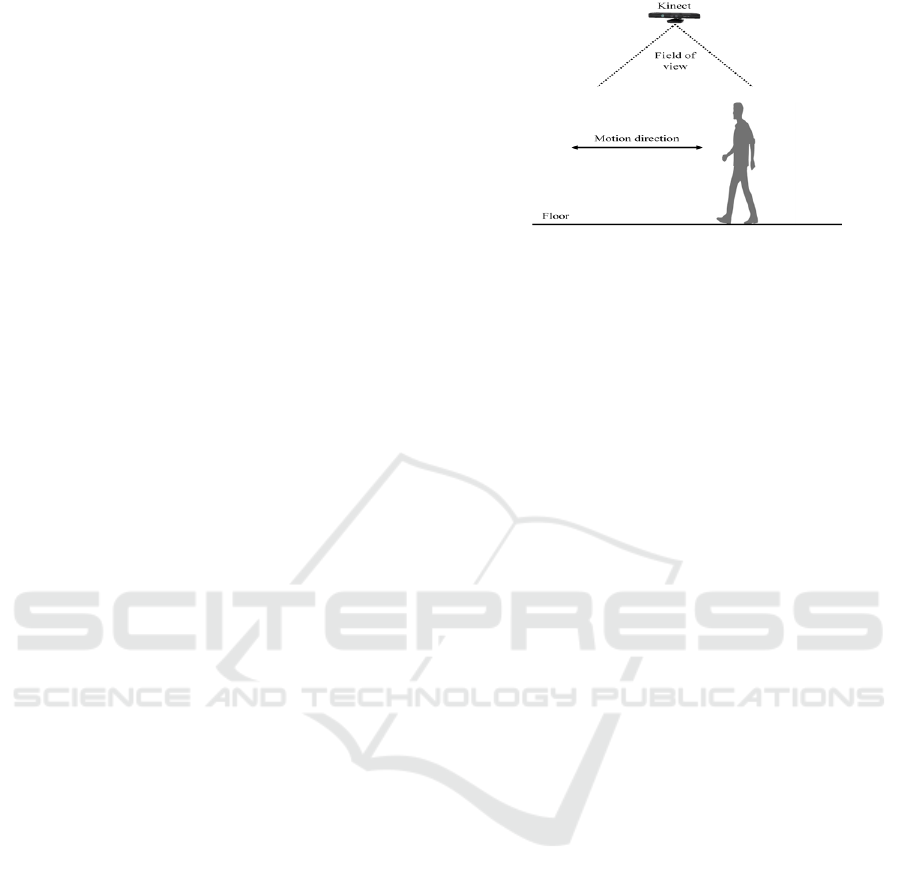
Figure 1: Sensor positioning.
ied scene. The use of Kinect in zenithal position re-
duces the recurrence of occlusion and the use of depth
data for people detection improve the segmentation.
The main contributions of this work are:
• The use of Kinect’s depth data with a smart sensor
to detect individuals crossing the LOI.
• The use of depth data from a kinect that is in-
stalled in zenithal position to construct both a bi-
nary and a grayscale images to facilitate the de-
tection and tracking processes.
3 PROPOSED METHOD
The objective of this work is the proposal of a solution
that allows counting the number of people entering
and leaving a closed area. To achieve this objective,
we proposed a method for counting individuals cross-
ing a LOI based on the use of depth map obtained
from a Kinect sensor. This counting approach is pro-
posed in the context of behavioral marketing analysis
to measure the flux of customers in a store.
As said previously, the people counting problem
was addressed in different ways either based on clas-
sical RGB cameras or depth sensors. Most proposed
methods are dealing with the same major issues which
are occlusions, crowd management, and segmentation
problems.
In order to deal with all these issues, we pro-
posed a counting strategy that is based on exploiting
depth data obtained from a Kinect sensor placed in
a zenithal position with respect to the motion direc-
tion as shown in Figure 1. The zenithal position of
the sensor reduces drastically the recurrence of occlu-
sions even in dense crowds and the use of depth data
improves segmentation in case of crowded scenes.
The proposed counting method is composed of
two main modules. The first module is the people
detection module which is based on exploiting depth
data from a Kinect sensor to detect individuals cross-
ing the virtual line of interest. The second module is
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
366

Figure 2: General diagram of the proposed method.
the tracking module that is based on the use of dedi-
cated particle filters to track detected individuals from
the first module in order to both determine the direc-
tion of their motions and avoid recounting the same
individual several times while he is moving within the
Kinect field of view. The proposed algorithm is illus-
trated in Figure 2.
3.1 People Detection Module
As said previously, the first part in our counting strat-
egy consists in people detection based on the use of
depth map obtained from a ceiling Kinect sensor. The
people detection is done in several steps as illustrated
in the diagram of Figure 3.
Figure 3: People detection.
The first step in this people detection scheme is
the detection of depth changes that represent the fore-
ground or the moving parts within the studied scene.
For this, we used a method of background subtrac-
tion with depth data obtained from the Kinect. The
background subtraction is done by frame differenc-
ing between the smoothed current and initial depth
maps. The initial depth map is obtained by esti-
mating the distance between the sensor and the non-
moving objects in the scene. This initial depth map
is used as background for background subtraction. In
our method the background is estimated and updated
based the use of running average over a patch of N
frames using equation 1.
background =
1
N
N
∑
i=1
depthMap
i
. (1)
Where: depthMap
i
is the depth map at frame i
and N is the total number of frames.
Ones the background estimated, both the back-
ground and the current depth maps are smoothed by
applying a Gaussian filter to reduce the noise within
the depth maps. The use of an adequate filter allows
both removing noise and conserving the general shape
of data. The resulting depth maps are used to estimate
both a grayscale image D
t
and a binary image B
t
. The
D
t
image represents depth changes at time t and B
t
image represents the foreground parts of the scene at
the same instant t. These images are estimated from
the difference image di f f
t
that corresponds to the dif-
ference between the current and initial depth maps.
The di f f
t
is calculated based on equation 2.
di f f
t
= |depthMap
t
− background|. (2)
Where: depthMap
t
and background are the cur-
rent and initial depth maps respectively.
Ones the di f f
t
image is calculated, it is used to
create both the D
t
by considering that each centime-
ter in the depth corresponds to a gray level in the D
t
image (this assumption is based on the fact that the
height of a person doesn’t exceed 255cm) and the B
t
image that represents foreground objects. This image
is created by supposing that depth values in di f f
t
im-
age that are within a certain range (th
min
and th
max
)
are part of the foreground. These two images are cre-
ated based on equations 3 and 4.
D
t
(x, y) =
di f f
t
(x, y) i f di f f
t
(x, y) < 256
0 otherwise
(3)
B
t
(x, y) =
1 i f th
min
< di f f
t
(x, y) < th
max
0 otherwise
(4)
The next step consists on the design of a smart
sensor that will be used to detect and segment fore-
ground objects to both separate foreground blobs into
different individuals and localize the heads of these
individuals. The proposed smart sensor is designed
as a rectangle that is placed over the LOI as shown in
Figure 4. This rectangle has a width that corresponds
to twice the estimated average of the width of the sur-
face occupied by a single individual in the scene and
People Counting based on Kinect Depth Data
367
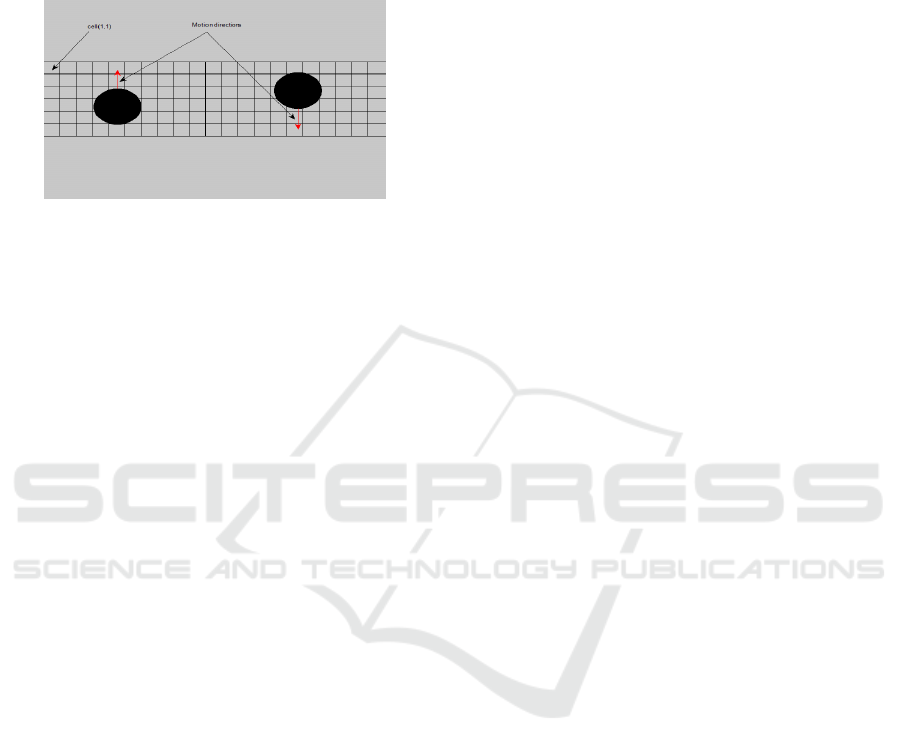
the length of the sensor corresponds to the size of the
image. This rectangle is divided into several square
cells with a width that corresponds to one third the
estimated average width of the surface occupied by a
single individual in the scene.
Figure 4: Design of the smart sensor.
Ones the smart sensor is designed, the next step
consists in finding the activation sequence that will
be used to detect and localize individuals within the
scene. The recovery of the activation sequence is done
in two steps. In the first step, the foreground image B
t
is used to detect active cells based on the number of
foreground pixels within each cell. Then if the num-
ber of foreground pixels is greater than a threshold τ
the cell is active (equation 5).
cell
i j
=
1 (active) i f N > τ
0 (notactive) otherwise
(5)
This step allows the detection of significant fore-
ground parts that may present either a single or a
group of individuals. Ones individuals and group of
individuals are detected, the second step consists in
using the grayscale image D
t
to localize individuals
and segment group of individuals into single individu-
als. This is done by detecting local maximums within
the active cells. The detection of local maximums is
done by summing up all pixels within each active cell
based on the use of equation 6.
cell(i, j) =
∑
cell
i j
D
t
i f cell
i j
active
0 otherwise
(6)
Then a cell is considered to be a local maximum if
the value cell(i, j) is greater than all surrounding cells
(cell(i − 1, j − 1), cell(i − 1, j), ...cell(i + 1, j + 1)).
The detected maximums are considered to be heads
and the number of these maximums corresponds to
the number of individuals crossing the LOI at time t.
3.2 Tracking Module
The second part of our counting strategy consists in
the integration of a tracking module that enable track-
ing individuals detected in the first module to both
determine the motion direction and avoid recounting
the same individual several times while he is moving
within the Kinect field of view.
For this, we used a tracking strategy based on the
use of a dedicated particle filter similar to the one used
in (Nummiaro et al., 2002) for each detected individ-
ual. The tracking is performed in the grayscale im-
age D
t
that represents depth changes. Then, each de-
tected individual is represented by a square centered
at the point (x, y) with width w and the new position
for each individual is estimated based on the motion
model represented by equations 7 and 8.
(x, y)
t
= (x, y)
(t−1)
+ (u, v)
(t−1)
• ∆t (7)
(u, v)
t
= (u, v)
(t−1)
(8)
where: (x, y) and (u, v) are the position and veloc-
ity of tracked individual along the x-y axis.
Then, these new particles are weighted based on
the difference between their intensity histogram and
the intensity histogram of the tracked individual. The
new position of the individual is determined from the
position of the weighted particles according to equa-
tion 9.
x
y
=
N
∑
n=1
w
(n)
t
x
y
(n)
(9)
Where:(x, y) is the estimated position for the
tracked individual, w
(n)
t
is the weight of the particle
located at position (x, y)
(n)
, and N corresponds to the
number of particles used in our particle filter.
This module allow the recovery of the trajectory
of tracked individuals within the Kinect field of view.
These trajectories indicate the direction of motion for
each individual (entering or leaving).
4 EVALUATION
For evaluating our counting strategy, we used a Kinect
for windows version 1 that was installed in zenithal
position with respect to the motion direction. The
experiment was done in a lab. During experiment 5
individuals were recorded while moving through the
Kinect field of view. These individuals were recorded
in different scenarios such as ”walking” and ”cross-
ing”. In the first scenario ”walking” the individuals
were moving either close or far from each other in the
same direction whereas in the second scenario ”cross-
ing” the individuals were moving in different direc-
tions (some entering and the others leaving the room).
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
368

These data were first used to evaluate our peo-
ple detection method. For this, we start by estimat-
ing the background based on the use of the first 100
frames. Then, this background is used to estimate the
grayscale images D
t
and the binary images B
t
by tak-
ing (th
min
= 50 and th
max
= 255). These images are
used with a sensor with a cell width of 50 pixels. The
results of this detection method are illustrated in Fig-
ure 5. Then, detections are used as initialization for
the tracking module and the tracking results are illus-
trated in Figure 6.
(a) (b)
(c) (d)
(e) (f)
Figure 5: Detection results: (a) binary image, (b) activation
sequence, (c) grayscale image , (d) people localization, (e)
corresponding RGB image, (f) detected individuals.
(a) (b)
Figure 6: Tracking results: (a) Frame 726, (b) frame 740.
From the above figures, we notice that our detec-
tion methods is able to detect individuals and segment
group of individuals into single individuals even when
people are close to each others. This is due to the use
of depth data with a smart sensor that enable a simple
detection for local maximums that represents individ-
ual’s heads. Then, the use of the tracking module en-
able the detection of the motion direction as shown in
the Figure 6.
The use of both the detection and the tracking
modules allows the count of people entering and leav-
ing the given closed area. The counting results based
on the motion direction compared to the ground truth
of the above experiment are shown in the diagram of
Figure 7.
Figure 7: Counting results.
5 CONCLUSION
In this paper, we proposed a method for counting the
number of people entering and leaving a closed area.
The proposed strategy is based on exploiting depth
data obtained from a Kinect sensor. The sensor is in-
stalled in zenithal position with respect to the motion
direction in order to reduce the occurrence of occlu-
sions.
The proposed method is based on the design of
two main modules. The first module is the people
detection module which is based on the use of smart
sensor in both a grayscale image D
t
that represents
depth changes within the studied scene and a binary
image B
t
that represents foreground objects. The use
of a smart sensor in these two images allows a good
segmentation of crowds and a good localization of in-
dividuals. Ones people are detected, the second mod-
ule which is the tracking module is used to track these
individuals in the D
t
image. The tracking module is
based on the use of dedicated particle filter for each
individual. The use of this module allows both de-
termining the direction of motion (entering or leaving
the store) and reducing the redundancy of count by
avoiding the recount of the same individual several
times while he is moving within the Kinect field of
view.
People Counting based on Kinect Depth Data
369

REFERENCES
Anti
´
c, B., Leti
´
c, D.,
´
Culibrk, D., and Crnojevi
´
c, V. (2009).
K-means based segmentation for real-time zenithal
people counting. In Image Processing (ICIP), 2009
16th IEEE International Conference on, pages 2565–
2568. IEEE.
Barandiaran, J., Murguia, B., and Boto, F. (2008). Real-
time people counting using multiple lines. In Image
Analysis for Multimedia Interactive Services, 2008.
WIAMIS’08. Ninth International Workshop on, pages
159–162. IEEE.
Billingsley, J., Ellin, A., and Dolsak, G. (2008). The design
and application of rotary encoders. Sensor Review,
28(2):150–158.
Bondi, E., Seidenari, L., Bagdanov, A. D., and Del Bimbo,
A. (2014). Real-time people counting from depth im-
agery of crowded environments. In Advanced Video
and Signal Based Surveillance (AVSS), 2014 11th
IEEE International Conference on, pages 337–342.
IEEE.
Chen, C.-H., Chen, T.-Y., Wang, D.-J., and Chen, T.-J.
(2012). A cost-effective people-counter for a crowd
of moving people based on two-stage segmentation.
Journal of Information Hiding and Multimedia Signal
Processing, 3(1):12–25.
Cong, Y., Gong, H., Zhu, S.-C., and Tang, Y. (2009). Flow
mosaicking: Real-time pedestrian counting without
scene-specific learning. In Computer Vision and Pat-
tern Recognition, 2009. CVPR 2009. IEEE Confer-
ence on, pages 1093–1100. IEEE.
Del Pizzo, L., Foggia, P., Greco, A., Percannella, G., and
Vento, M. (2015). A versatile and effective method for
counting people on either rgb or depth overhead cam-
eras. In Multimedia & Expo Workshops (ICMEW),
2015 IEEE International Conference on, pages 1–6.
IEEE.
Del Pizzo, L., Foggia, P., Greco, A., Percannella, G.,
and Vento, M. (2016). Counting people by rgb or
depth overhead cameras. Pattern Recognition Letters,
81:41–50.
Fu, H., Ma, H., and Xiao, H. (2014). Scene-adaptive ac-
curate and fast vertical crowd counting via joint using
depth and color information. Multimedia tools and
applications, 73(1):273–289.
Ma, Z. and Chan, A. B. (2013). Crossing the line: Crowd
counting by integer programming with local features.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 2539–2546.
Nummiaro, K., Koller-Meier, E., and Van Gool, L. (2002).
Object tracking with an adaptive color-based particle
filter. In Joint Pattern Recognition Symposium, pages
353–360. Springer.
Van Oosterhout, T., Bakkes, S., Kr
¨
ose, B. J., et al. (2011).
Head detection in stereo data for people counting and
segmentation. In VISAPP, pages 620–625.
Zhang, X., Yan, J., Feng, S., Lei, Z., Yi, D., and Li, S. Z.
(2012). Water filling: Unsupervised people count-
ing via vertical kinect sensor. In Advanced Video and
Signal-Based Surveillance (AVSS), 2012 IEEE Ninth
International Conference on, pages 215–220. IEEE.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
370
