
Interactive LSTM-Based Design Support in a Sketching Tool for the
Architectural Domain
Floor Plan Generation and Auto Completion based on Recurrent Neural Networks
Johannes Bayer, Syed Saqib Bukhari and Andreas Dengel
German Research Center for Artificial Intelligence, Trippstadter Str. 122, Kaiserslautern, Germany
Keywords:
Archistant, Archistant WebUI, LSTM, Early Design Phases, Architectural Support.
Abstract:
While computerized tools for late design phases are well-established in the architectural domain, early design
phases still lack widespread, automated solutions. During these phases, the actual concept of a building is
developed in a creative process which is conducted manually nowadays. In this paper, we present a novel
strategy that tackles the problem in a semi-automated way, where long short-term memories (LSTMs) are
making suggestions for each design step based on the user’s existing concept. A design step could be for
example the creation of connections between rooms given a list of rooms or the creation of room layouts given
a graph of connected rooms. This results in a tightly interleaved interaction between the user and the LSTMs.
We propose two approaches for creating LSTMs with this behavior. In the first approach, one LSTM is trained
for each design step. In the other approach, suggestions for all design steps are made by a single LSTM.
We evaluate these approaches against each other by testing their performance on a set of floor plans. Finally,
we present the integration of the best performing approach in an existing sketching software, resulting in an
auto-completion for floor plans, similar to text auto-completion in modern office software.
1 INTRODUCTION
Similar to other engineering disciplines, architecture
makes use of different iterative strategies for the gen-
eration of floor plans during early design phases in
construction projects. One established approach in
this area is the so-called room schedule (also referred
to as architectural program), i.e. a high level descrip-
tion of the building (often given by the building con-
tractor or customer). A room schedule can be either
a list of rooms only (denoted by their room function
like living, working, sleeping, etc.) or a graph of
rooms (i.e. a set of rooms along with restrictions how
rooms should be connected or at least placed adjacent
to each other). Some room schedules already include
restrictions regarding the sizes and shapes of individ-
ual rooms.
Given a room schedule, the architects task is to
develop an actual floor plan. This is nowadays usu-
ally done in a manual and iterative manner. E.g.
semi-transparent sketching paper is being written on
with pencils. When putting on a new sheet of semi-
transparent paper on top of the old one, the old sketch
serves as a template for the next, refining design in-
teraction. While a fair amount of this task is highly
creative, many actions remain rather repetitive and
monotone for the architect.
In this paper, we describe a semi-automated ap-
proach for drafting architectural sketches. In section
2, we outline the existing technologies and concepts
on which our approach is based on. In section 3,
we outline the presentation of floor plans for recur-
rent neural networks. In section 4 we describe our
approach, i.e. how our models are trained and how
floor plan drafts are extended and completed using
our trained models. We also point out some of the
problems we encountered during the design of our
system and how the trade-offs we made attempt to
solve them. After that, in section 5 we outline how
we integrated our approach an existing sketching soft-
ware. We evaluate our approach in section 6, where
we present the results of an automatically conducted
performance evaluation on a set of floor plans and
provide examples of real-value outputs of our trained
models and illustrate the use of the integrated system.
We conclude our work in section 7 where we also give
an outlook on our future work.
Bayer, J., Bukhari, S. and Dengel, A.
Interactive LSTM-Based Design Support in a Sketching Tool for the Architectural Domain - Floor Plan Generation and Auto Completion based on Recurrent Neural Networks.
DOI: 10.5220/0006589101150123
In Proceedings of the 7th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2018), pages 115-123
ISBN: 978-989-758-276-9
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
115

2 RELATED WORK
2.1 The Long-Short Term Memory
Long-Short Term Memories (Hochreiter and Schmid-
huber, 1997), (Gers et al., 2000) are a class of recur-
rent artificial neural networks. During each time step,
they are supplied with an input vector of arbitrary (but
fixed) length, while they emit an output vector of a
size equivalent to their amount of cells. Stacked with
an MLP, they may also return a vector of also arbitrary
(but fixed) size. As vector sequence processing units,
LSTMs are capable of large variety of different tasks
like prediction of future events as well as memoriz-
ing and transforming information. The components
of their input vectors have to be normalized a certain
the interval (often [0, 1]). Likewise, their output val-
ues are limited to a certain interval (often [0, 1]). The
experiments described have been conducted using the
OCRopus LSTM implementation (Breuel, 2008).
2.2 The Architectural Design Support
Tool Archistant
Archistant (Sabri et al., 2017) is an experimental
system for supporting architects during early design
phases in the search of floor plans similar to an en-
tered sketch. It consists of a web front-end, the
Archistant WebUI, and a modular back-end, in which
floor plans are processed between the individual mod-
ules via the AGraphML format.
2.2.1 Archistant WebUI
The Archistant WebUI (see Figure 1, also formerly
known as Metis WebUI (Bayer et al., 2015)) provides
functionality for sketching floor plans in an iterative
way. The workflow of the Archistant WebUI employs
the room schedule working method as it exists in ar-
chitecture. Every aspect of a room may be specified as
abstract or specific as intended by the user and the de-
gree of abstractness may be altered by the user during
his work. This continuous refinement allows for a top-
down work process, in which a high-level building
description is transformed into a specific floor plan.
The Archistant WebUI comes as a web application
and runs inside a JavaScript-supporting browser.
2.2.2 AGraphML
AGraphML (Langenhan, 2017) is Archistant’s ex-
change format for floor plan concepts. AGraphML
is a specification of GraphML (Brandes et al., 2013),
hence the floor plans are described in a graph-based
Table 1: Edge Types in AGraphML.
Type Description
Wall
Rooms share a uninterrupted wall
only
Door
Rooms connected by door
Entrance
Rooms connected via a reinforced
door
Passage
Rooms connected by a simple dis-
continuity in a wall
manner: each room is represented by a node in the
graph. Hence, attributes of a room are implemented
as node attributes. Likewise, graph edges model the
connections between rooms (see Table 1).
3 ENCODING FLOOR PLANS
FOR RECURRENT NEURAL
NETWORK PROCESSING
This sections outlines the representation of floor plans
used for processing by (recurrent) neural networks. In
the current status of our work, we restrict ourselves
to a limited set of attributes, that are incorporated in
our LSTM models and graph representations: Room
functions, connections between rooms, room layouts
(i.e. a polygon which is representing a rooms sur-
rounding walls), and information whether or not nat-
ural light is available in a room or not.
A floor plan has to be described by a sequence
of vectors, that are being processed one after another
by an LSTM. There are several requirements to the
floor plan representation in our scenario: Both se-
quence length and vector size should be as small as
possible in order to minimize learning and productive
execution time. The vectors should be easy to inter-
pret, and the actual information should be separated
by data-less so-called control vectors (their purpose
will be explained later). Most important, the infor-
mation flow in the vector sequence should mimic the
actual workflow an architect may have when design-
ing a floor plan. Consequently, abstract information
should precede specific information, i.e. declaration
of all rooms along with their room functions should
be before the declaration of the actual room layouts.
3.1 Blocks
A complete floor plan description in our chosen rep-
resentation consists of 3 different blocks:
1. Room Function Declarations.
2. Room Connections.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
116

Figure 1: Screenshot of the Archistant WebUI.
Figure 2: Rendered Image of a Sample Floor. Window
Symbols indicate access to natural light. The detail level
shown in this image equals the information represented in
the feature vectors.
3. Room Geometry Layouts.
Each block consists of a number of tags of the
same kind, where each tag provides a piece of infor-
mation. Each tag is represented by a number of vec-
tors. An example for a rendered floor plan along with
its representation as a sequence of vectors can be seen
in Figure 2 and Figure 3 respectively.
3.2 The Feature Vector
A feature vector in the context of this paper can be
considered as structured into several channels as fol-
lows (see Figure 4 for the relation between channels
and actual feature vector components):
• The blank channel indicates that no information
Figure 3: Feature Vector Sequence of the Same Sample
Floor Encoding. Every feature vector occupies one col-
umn. The encoding consists of three blocks. The first block
ranges from column 0 to 5 and defines the rooms with IDs
(row 20-29), the room function, the room’s center position
(row 31 and 32), and whether or not a room has access to
natural light (row 30). In Block 2 (column 6-12) connec-
tions between the rooms are defined. In block 3 (column
13-31) the polygons of the room surrounding walls are de-
scribed.
are present (used to indicate start and ending of
floor plans or to signal the LSTM to become ac-
tive)
• The control channel indicates that a new tag be-
gins and what type the new tag is
• The room type channel (room types are called
room functions in architecture)
• The connection type channel
Interactive LSTM-Based Design Support in a Sketching Tool for the Architectural Domain - Floor Plan Generation and Auto Completion
based on Recurrent Neural Networks
117

Figure 4: Structure of the Feature Vector.
Figure 5: The different Tag Types in Feature Vectors Rep-
resentation (channel view). Left: Definition of a Living (i)
Room with ID (1) with a Window (t) with a center at po-
sition (x,y). Middle: Definition of a door connection (d)
between rooms 0 and 1. Right: Definition of the polygon
layout of room 0.
• The room ID channel is used to declare or refer-
ence an individual room
• A second ID channel is used for connection dec-
laration
• has Window property
• X Ordinate of a Point
• Y Ordinate of a Point
The components, which encodes a point’s position
are real values between 0 and 1, all other components
are boolean (0 for false, 1 for true). 1-Hot Encod-
ing has originally been considered, but is inefficient
(the final, tight encoding we have chosen is around 88
percent smaller than our experimental 1-Hot encod-
ing). So in order to minimize the sequence length,
each feature vector may contain several information.
As an disadvantage, the finally chosen, tight encoding
only allows for a fixed upper limit of rooms that has
to be determined before training (we decided to allow
for 10 rooms).
3.3 Tags
Tags are the atomic units a floor plan is consists of. At
the same time, they can be considered actions carried
out by an entity (like the user) to build up a floor plan.
Every tag is represented by a set of successive feature
vectors. All tags start with a so-called control vector
solely indicating the tags type. Figure 5 illustrates
how the different tag types are made up from feature
vectors. Currently, there are three different types of
tags:
3.3.1 Room Definition Tags
These tags define the very room by assigning it an ID
as well as a room type, a flag indicating whether or not
the room has a window, and the position of its center.
This tag always occupies 2 feature vectors.
3.3.2 Connection Tags
Connection Tags declare the connection between
rooms. They consist of the references between the
two connection partners and the connection type. The
connection types equals the ones from AGraphML.
This tag always occupies 2 feature vectors.
3.3.3 Room Layout Tags
These tags define a polygon surrounding walls around
a room. This tag occupies p+1 feature vectors, where
p is the number of corners in the polygon.
3.4 Room and Connection Order
The order of rooms and connections underlies a trade-
off: a sorted order of rooms and connections only al-
lows for one representation of the same floor plan. By
allowing for random order, the actual user behavior
is better approximated and there are multiple repre-
sentations of the same floor plan (many samples can
be created from one floor plan). However, when con-
sidering connections to be given in a random fash-
ion, an LSTM, that should predict them given a set
of room definitions, is hard to train. Since a random
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
118
order of room definitions and connections adds an un-
predictable noise to the LSTM, we decided the order
or rooms and connections as follows:
3.4.1 Room Order
The order in which the rooms are given is determined
by the center position of the room within the floor
plan. A room which center has a smaller X ordinate
appears before before a room with a greater X center
ordinate. In case of the centers of two rooms share
the same X ordinate, the room with the smaller Y or-
dinate precedes the other room. The order of rooms is
the same for block 1 and block 3.
3.4.2 Connection Order
The order of connections is determined by the order of
the rooms. At this point, the connection graph is con-
sidered to be directed and that the source room IDs
are always smaller than target room IDs. If two con-
nections have different source room IDs, the one with
the lower source room ID will come before the one
with the higher source room ID. If two connections
have the same source room ID, the connection with
the lower target room ID will precede the connection
with higher target room ID.
4 PROPOSED MECHANISM OF
AUTOCOMPLETION OF
FLOOR PLANS USING LSTM
In this section, we present our proposed algorithm for
expanding and completing of floor plans. Here, we
outline the modus operandi, with which we hand ex-
isting parts of floor plans the (LSTM) model and re-
trieve new parts.
4.1 LSTM Input and Output Sequences
The structure of the model’s input vector is identi-
cal to the structure of its output vector and are both
referred to as sequences of feature vectors here. In
this paper, we examine two different approaches: The
block generation sequencers and the vector prediction
sequencers.
4.1.1 Block Generation Sequencers
Block generation sequencers follow a simple pattern:
The first n blocks are given to the model’s input. Si-
multaneously, the model’s output is simply a series
of blank vectors (the blank component is 1, while
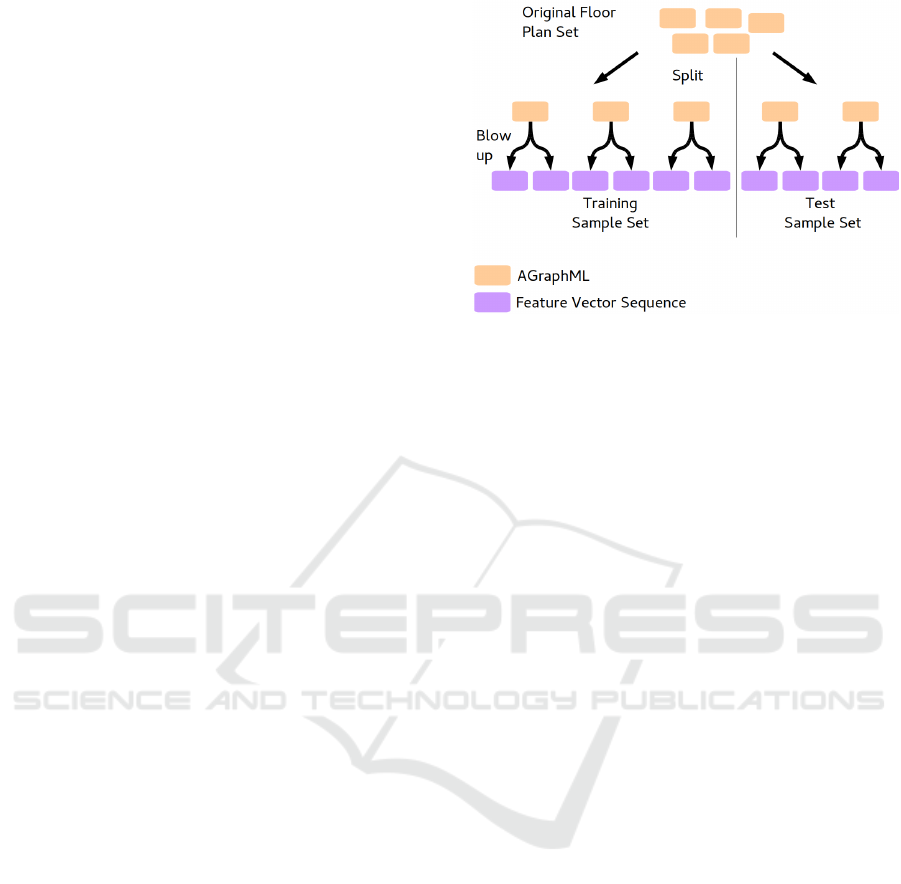
Figure 6: Sample Preparation.
all other components are 0). Afterwards, a sequence
of blank vectors is used as input while the n + 1th
block is emitted by the model (eventually finished by
a blank vector). As a result, there has to be one model
per block in order to allow for the support of the user
during the entire work flow. Additionally, a model for
supporting the first design step cannot be created.
4.1.2 Vector Prediction Sequencers
Vector prediction sequencers aim to predict the n-th
vector of a sequence given the first n − 1 sequence
vectors. Vector prediction sequencers are trained by
using the vector sequence of a floor plan as the input
of the model and the same sequence (shifted by one
position to the past) as output. The existing gaps at
the begin of the input sequence (and at the end of the
output sequence) are filled with blank vectors.
4.2 Preparation of Database
In order to make use of the limited set of floor plans
available in AGraphML, some preprocessing is ap-
plied to generate a training sample set as well as a
test set (see Figure 6). We omitted a validation set
since the amount of floor plans he had available was
very limited and we knew from previous experiments
with a similar DB that overfitting is not a serious is-
sue in our situation. First of all, the sample set is split
into two disjoint subsets. Each floor plan is now con-
verted into b different samples (we refer to this pro-
cess as blow-up and to b as blow-up factor). A sam-
ple is derived from a floor plan by rotating all point of
the floor plan (centers, corner points) by an random
vector and then create the feature vector sequence as
described so far. During this step, the center and cor-
ner points of the floor plan are also normalized to the
[0, 1]
2
space. We want to point out, that because of the
Interactive LSTM-Based Design Support in a Sketching Tool for the Architectural Domain - Floor Plan Generation and Auto Completion
based on Recurrent Neural Networks
119

applied rotation, also the order of rooms and connec-
tions is different within the samples generated from
one floor plan.
4.3 Extension of Floor Plans
The two different approaches need different strategies
to generate new floor plan aspects, as outlined below:
4.3.1 Block Generation Sequencers
In this approach, a new block is generated by feeding
a concatenation of previous blocks with a sequence of
blank vectors into the model and reading the predicted
block from the model’s output. The blank vector se-
quence length must be bigger that the expected length
of the predicted block. This is can be done by deter-
mining the upper limit of predicted block length in the
training database.
4.3.2 Vector Prediction Sequencers
Following a metaphor by Alex Graves, in which se-
quence predictors used for sequence generation are
compared to a person dreaming (by iteratively treating
their own output as if they are real (Graves, 2013)),
this structures works like a dreaming person who gets
inspiration from outside and who combines the in-
formation from outside with its flow of dreaming.
Because of that, we refer to this technique as the
shallowDream structure (see Figure 7).
Basically, this structure operates in two different
phases. During the first phase, the existing floor plan
(in this context also referred to as concept) is fed into
the LSTM. During this phase of concept injection, all
outputs of the LSTM are ignored. After the concept
has been injected completely, the LSTM takes over
both the generation of the structures output that also
serves as its own input. This phase is also referred to
as generation phase.
Using the shallowDream structure, we are able to
implement multiple different functions by simply al-
tering the concept type and the stop symbol. E.g. in
order to predict room connections, the a concatena-
tion of block 1 and the control vector of a block 2 tag
(connection tag) is used as concept and the control
vector of a room layout tag is used as stop symbol.
The control vector at the end of a concept is used to
instruct the LSTM to generate the favored tag type
(and hence to start the new block).
Even after intensive training, the output produced
by the LSTM only approximates the intended feature
vectors. Consequently, these feature vectors have to
be regenerated during the generation phase. For that
purpose, three different strategies are proposed.
No Regeneration In this primitive approach, the
current feature vector is reinserted without any modi-
fications into the models input.
Vector-Based Regeneration This strategy solely
utilizes knowledge about the feature vector’s struc-
ture. Generally, all boolean components are recov-
ered by mapping them to 1.0 or 0.0 based on which
the component is closer to and the real-valued com-
ponents remain unaltered.
Sequence-Based Regeneration In this approach, a
state machine is keeping track of the current block
and tag the sequence is in (thereby utilizing knowl-
edge about the sequence structure). Based on that in-
formation a vector is regenerated by calculating the
most likely, possible vector.
5 INTEGRATION OF THE
PROPOSED MECHANISM INTO
ARCHISTANT
In this work, we restrict ourselves on the two follow-
ing functions:
• Room Connection Generation. Given a set of
rooms (each room is described by a center posi-
tion coordinate and room function) connections
are generated between them, turning a set of
rooms into a room graph.
• Room Layout Generation. Given a room Graph,
layouts for each room a layout (i.e. a polygon de-
scribing its surrounding walls) is generated.
For the sake of simplicity, we added a single but-
ton to the WebUI only, which we labeled ”Creativity”.
Based on the current state of the user’s work, the dif-
ferent functions are selected automatically.
6 EXPERIMENTS
We trained LSTMs based on our two sequencing ap-
proaches. In all cases, we used a training database
with 200 entries, a test database of 40 entries, a
blowup factor of 30, 500 LSTM cells and a learning
rate of 0.01.
6.1 Quantitative Analysis
In order to compare the performances of our differ-
ent approaches, we calculated the room connection
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
120

Figure 7: The ShallowDream structure. The inputs are marked green. Components of the LSTM recursion are marked blue.
generation on the room definitions of the test set of
floor plans and compared it with these floor plans ac-
tual connections. As a metric, we divided the amount
of wrong connections by the amount of actual con-
nections (we consider a connection to be completely
wrong (error 1.0), if the predicted connection does not
actually exist in the ground truth or partly wrong (er-
ror 0.5) if the connection type in ground truth is dif-
ferent). The final evaluation value is the arithmetic
average over all floor plans in the test set. The re-
sults are shown in Table 2. We want to emphasize
that floor plan generation is a creative task and that
the is not necessarily one solution to a given problem,
i.e. the used error calculation metrics do only hint the
actual performance of the approaches (an error of 0%
appears unrealistic to accomplish given that also the
floor plans in the database are only one way to solve
the problem).
Table 2: Performance comparison of the individual ap-
proaches for the connection generation task on the test set.
Approach Error
Block Generation Sequencer 65.78%
Vector Prediction Sequencer 66.08%
6.2 Qualitative Analysis
The performance of the shallowDream structure is
shown exemplary in two scenarios. For the room con-
nection generation, four rooms are given (fig. 9) as
a concept. As illustrated in Figure 8, the regenera-
tion strategy influences the output. Figure 10 depicts
a rendered version of the output produced by the se-
quence based regeneration.
In order to illustrate the performance of the room
layout generation, a different starting situation is used
(see fig. 11), the result is depicted in fig. 12.
7 FUTURE WORK
We have shown the general viability of our approach
(the output of the trained models resembles the in-
tended syntax in a quality sufficient for our inferenc-
ing algorithm to produce results). Nevertheless, a lot
of floor plan aspects are not yet covered in the existing
models. The actual position of doors and windows are
needs to be included into the models as well as sup-
port for multi-storey buildings. Apart from that, the
performance of the existing models is still limited. At
the moment, there is only one phase of concept in-
jection followed by a generation phase. By allowing
for multiple alternating phases of generation and con-
cept injection, even more functions could be realized.
Apart from that, better metrics have to be found to
assess a models performance.
In order to both allow for better comparison to
similar approaches and to improve the performance of
our system, the presented approach can be applied to
a standard database (de las Heras et al., 2015) and ex-
isting algorithms (Delalandre et al., 2007) can be used
to increase the sample size of the sample database.
Apart from that, our approach can be used as a
general template for machine learning of user behav-
ior, given that the data structure manipulated by the
user can be described as a graph. Consequently, a
more general implementation of a graph-based ma-
chine learning framework can be build from our ap-
proach.
ACKNOWLEDGMENT
This work was partly funded by Deutsche
Forschungs-Gemeinschaft.
Interactive LSTM-Based Design Support in a Sketching Tool for the Architectural Domain - Floor Plan Generation and Auto Completion
based on Recurrent Neural Networks
121

Figure 8: The regeneration technique in shallowDream in-
fluences the generated feature vector sequences. From Top
to Bottom: 1. The concept. 2. No Regeneration. 3.Vector-
Based Regeneration 4. Sequence-Based Regeneration
REFERENCES
Bayer, J., Bukhari, S. S., Langenhan, C., Liwicki, M.,
Althoff, K.-D., Petzold, F., and Dengel, A. (2015).
Migrating the classical pen-and-paper based concep-
Figure 9: Input given to the shallowDream structure.
Figure 10: Output obtained from the shallowDream struc-
ture.
Figure 11: Input given to the shallowDream structure.
Figure 12: Output obtained from the shallowDream struc-
ture.
tual sketching of architecture plans towards computer
tools-prototype design and evaluation. In Interna-
tional Workshop on Graphics Recognition, pages 47–
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
122

59. Springer.
Brandes, U., Eiglsperger, M., Lerner, J., and Pich, C.
(2013). Graph markup language (graphml). Hand-
book of graph drawing and visualization, 20007:517–
541.
Breuel, T. M. (2008). The ocropus open source ocr system.
In Electronic Imaging 2008, pages 68150F–68150F.
International Society for Optics and Photonics.
de las Heras, L.-P., Terrades, O. R., Robles, S., and S
´
anchez,
G. (2015). Cvc-fp and sgt: a new database for
structural floor plan analysis and its groundtruthing
tool. International Journal on Document Analysis and
Recognition (IJDAR), 18(1):15–30.
Delalandre, M., Pridmore, T., Valveny, E., Locteau, H., and
Trupin, E. (2007). Building synthetic graphical doc-
uments for performance evaluation. In International
Workshop on Graphics Recognition, pages 288–298.
Springer.
Gers, F. A., Schmidhuber, J., and Cummins, F. (2000).
Learning to forget: Continual prediction with lstm.
Neural computation, 12(10):2451–2471.
Graves, A. (2013). Generating sequences with recurrent
neural networks. arXiv preprint arXiv:1308.0850.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural computation, 9(8):1735–1780.
Langenhan, C. (2017). Datenmanagement in der Architek-
tur. Dissertation, Technische Universitt Mnchen,
Mchen.
Sabri, Q. U., Bayer, J., Ayzenshtadt, V., Bukhari, S. S., Al-
thoff, K.-D., and Dengel, A. (2017). Semantic pattern-
based retrieval of architectural floor plans with case-
based and graph-based searching techniques and their
evaluation and visualization.
Interactive LSTM-Based Design Support in a Sketching Tool for the Architectural Domain - Floor Plan Generation and Auto Completion
based on Recurrent Neural Networks
123
