
Road Boundary Detection using In-vehicle Monocular Camera
Kazuki Goro and Kazunori Onoguchi
Graduate School of Science and Technology, Hirosaki University, 3 Bunkyo-cho, Hirosaki, 036-8561, Japan
Keywords:
Inverse Perspective Mapping, ITS, Shoulder of a Road, Snow Wall, Snakes.
Abstract:
When a lane marker such as a white line is not drawn on the road or it’s hidden by snow, it’s important for
the lateral motion control of the vehicle to detect the boundary line between the road and the roadside object
such as curbs, grasses, side walls and so on. Especially, when the road is covered with snow, it’s necessary to
detect the boundary between the snow side wall and the road because other roadside objects are occluded by
snow. In this paper, we proposes the novel method to detect the shoulder line of a road including the boundary
with the snow side wall from an image of an in-vehicle monocular camera. Vertical lines on an object whose
height is different from a road surface are projected onto slanting lines when an input image is mapped to a
road surface by the inverse perspective mapping. The proposed method detects a road boundary using this
characteristic. In order to cope with the snow surface where various textures appear, we introduce the degree
of road boundary that responds strongly at the boundary with the area where slant edges are dense. Since the
shape of the snow wall is complicated, the boundary line is extracted by the Snakes using the degree of road
boundary as image forces. Experimental results using the KITTI dataset and our own dataset including snow
road show the effectiveness of the proposed method.
1 INTRODUCTION
For the past several decades, many vision-based lane
detection methods have been proposed for advanced
driver assistance system or autonomous driving sys-
tem(M. Bertozzi, A. Broggi, M. Cellario, A. Fas-
cioli, P. Lombardi and M. Porta, 2002)(J. C. Mc-
Call and M. M. Trivedi, 2006)(B. Hillel, R. Lerner,
D. Levi, and G. Raz, 2014). Most of these meth-
ods detect lane markers such as white lines from an
image and estimate a traffic lane. In the literature
(M. Bertozzi and A. Broggi, 1998), a belt-like re-
gion whose width is constant and whose brightness
is higher than a road surface is detected as a lane
marker. In the literature (J.Douret, R. Labayrade, J.
Laneurit and R. Chapuis, 2005), a lane marker is de-
tected from a pair of the positive edge and the nega-
tive edge with constant distance. The literature (M.
Meuter, S. Muller-Schneiders, A. Mika, S. Hold, C.
Numm and A. Kummert, 2009) proposes the method
that detects a boundary of the white line from a peak
of the histogram of edge gradient. The literature (C.
Kreucher and S. Lakshmanan, 1999) proposes the
method that detects a lane marker by extracting a
slanting edge by DCT. The method to detect a broken
line(S. Hold, S. Gormer, A. Kummert, M. Meuter, S.
Muller-Schneiders, 2010) or a zebra line(G. Thomas,
N. Jerome and S. Laurent, 2010) by a frequency anal-
ysis is also proposed. The literature (Z. W. Kim,
2008) detects a lane marker by a discriminator cre-
ated by learning many lane marker images.
Although these methods are effective for roads on
which lane markers are drawn, they can not be ap-
plied to roads without lane markers or roads covered
with snow. In these cases, it’s necessary to detect the
boundary line between the road and the roadside ob-
ject such as curbs (Fig. 1(a)), grasses (Fig. 1(b)),side
walls (Fig. 1(c)) and so on, instead of lane markers.
Especially, when the road is covered with snow, the
boundary with the snow side wall (Fig. 1(d)(e)(f))
needs to be detected since other roadside objects are
hidden by snow.
To detect a shoulder of the road, several methods
using color (M. A. Turk, D. G. Morgenthaler, K. D.
Gremban and M. Marra, 1988) and texture(J. Zhang
and H. Nagel, 1994) have been proposed. However,
when a road is covered with snow, it’s difficult to
detect a road boundary by color and texture because
there are various kinds of snow surfaces, such as the
rough snow surface (Fig. 1(d)), the rutted snow sur-
face (Fig. 1(e)), and smooth white snow surface (Fig.
1(f)).
Since road shoulder is usually different in height
from a road plane, many methods using depth infor-
Goro, K. and Onoguchi, K.
Road Boundary Detection using In-vehicle Monocular Camera.
DOI: 10.5220/0006589703790387
In Proceedings of the 7th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2018), pages 379-387
ISBN: 978-989-758-276-9
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
379

mation obtained by a stereo camera have been pro-
posed(D. Pfeiffer and U. Franke, 2010)(N. Einecke
and J. Eggert, 2013)(J. K. Suhr and H. G. Jung,
2013)(C. Guo, J. Meguro, Y. Kojima and T. Naito,
2013)(M. Enzweiler, P. Greiner, C. Knoppel and U.
Franke, 2013)(J. Siegemund, D. Pfeiffer, U. Franke
and W. Forstner, 2010). However, a stereo camera is
more expensive than a monocular camera and it takes
time and effort to install because strict calibration be-
tween two cameras is needed.
Road detection method based on semantic seg-
mentation has also been proposed. The literature (J.
M. Alvarez, T. Gevers and A. M. Lopez, 2010) pro-
poses the method which extracts road area by com-
bining 3D road cues, such as a horizon line, a vanish-
ing point and road geometry, and temporal road cues
in Bayesian framework. The literature (D. Hoiem,
A. A. Efros and M. Hebert, 2007) detects road area
by describing the 3D scene orientation of each im-
age region coarsely. The literatures (J. M. Alvarez,
Y. LeCum, T. Gevers and A. M. Lopez, 2012) and (J.
M. Alvarez, T. Gevers, Y. LeCum and A. M. Lopez,
2012) propose the method which detects road area by
Convolutional Neural Networks. The literature (D.
Levi, N. Garnett and E. Fetaya, 2015) proposed the
StixelNet whose input is Stixel instead of images. The
literature (C. Brust, S. Sickert, M. Simon, E. Rodner
and J. Denzler, 2015) detects road area by Convolu-
tional Patch Network whose input is a single image
patch extracted around a pixel to be labelled. In the
literatures (R. Mohan, 2014) and (G. L. Oliveira, W.
Burgard and T. Brox, 2016), road detection method
which combines deep deconvolutional and convolu-
tional neural networks is proposed. The literature (A.
Laddha, M. K. Kocamaz , L. E. N-serment, and M.
Hebert, 2016) proposes a boosting based method for
semantic segmentation of road scenes. The literature
(D. Costea and S. Nedevschi, 2017) proposes road de-
tection method which reduces human labeling effort
by a map-supervised approach. These methods show
considerably good results in various road scenes but
the results applied to the snow road are not shown.
This paper proposes the novel method that can de-
tect a road boundary from an image of a monocular
camera even if a road is covered with snow. Verti-
cal lines on an object whose height is different from
a road surface are projected onto slanting lines when
an input image is mapped to a road surface by the
inverse perspective transformation. Our method de-
tects a road boundary using this characteristic. We
introduce the degree of road boundary whose value
increases at the boundary with the area where slant-
ing edges are dense. Road boundary is extracted by
the Snakes using the degree of road boundary as im-
(a) Curbs (b) Grasses
(c) Side walls (d) Snow side walls (Rough
snow surface)
(e) Snow side walls (Rutted
snow surface)
(f) Snow side walls
(Smooth snow surface)
Figure 1: Road boundary.
age forces.
This paper is organized as follows. Section 2
shows the outline of the proposed method. Section
3 explains how to create the Inverse Perspective Map-
ping (IPM) image from an input image. Section 4
explains the method to create IPM edge image that
emphasizes slant edges on road side objects. Section
5 explains the method to calculate the degree of road
boundary in each pixel of the IPM edge image. Sec-
tion 6 describes the method to track the road bound-
ary by the Snakes. Section 7 discusses experimental
results performed to several road scenes. Conclusions
are presented in Sect. 8.
2 THE OUTLINE OF THE
PROPOSED METHOD
Figure 2 shows the procedure of the proposed method.
The road boundary is detected in the Inverse Perspec-
tive Mapping (IPM) image. In the IPM image, the
patterns existing on the road surface are projected to
the shape viewed from the right overhead. On the
other hand, as shown in Fig. 3, road side objects or
obstacles whose height is different from the road sur-
face are projected to the shape falling backward from
the location where the obstacles touch the road plane.
Therefore, the proposed method detects the boundary
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
380
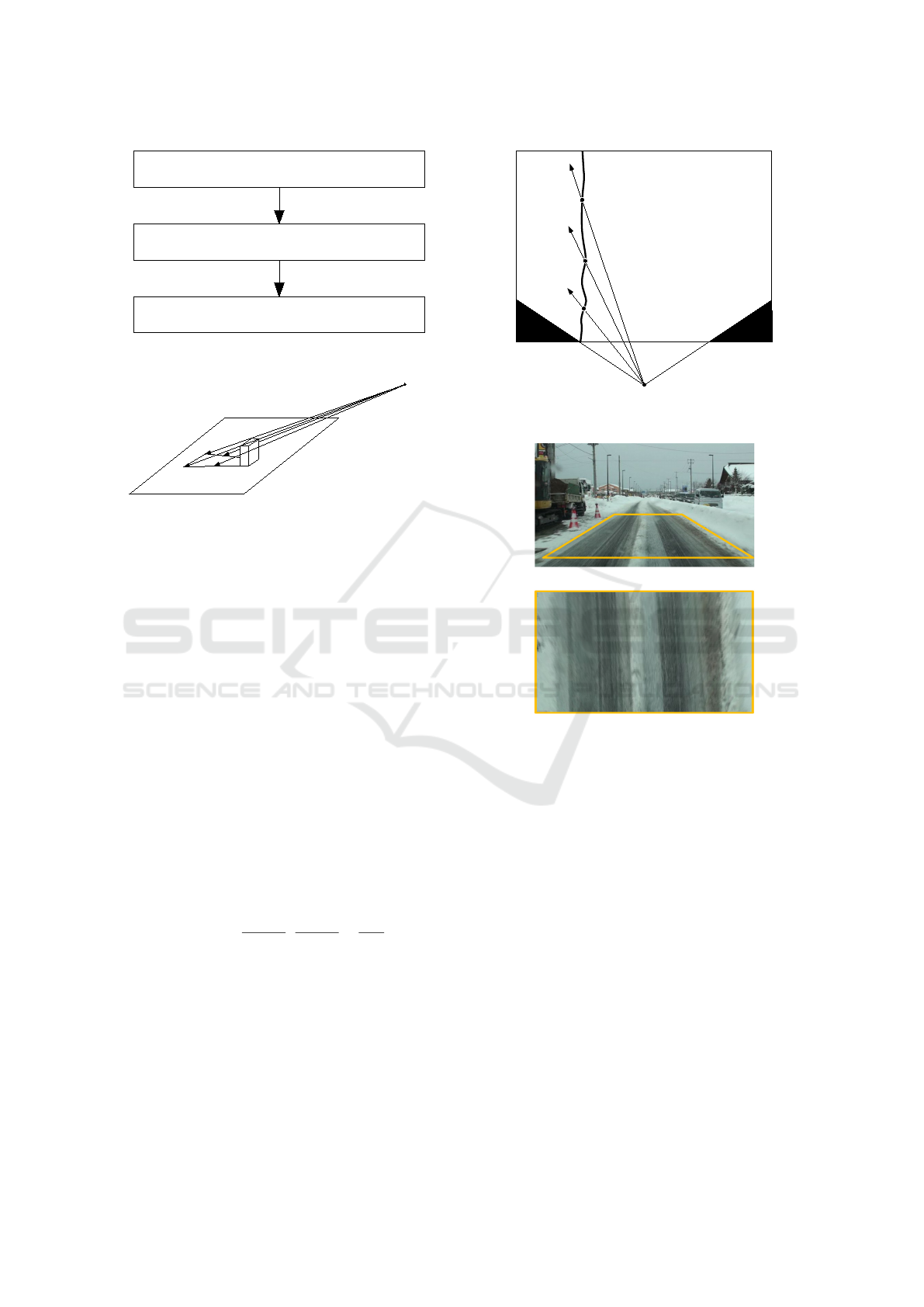
Figure 2: Outline of the proposed method.
Figure 3: Shape of projected area.
between dense areas of slant edges and sparse areas
of slant edges as the road boundary since a lot of slant
edges appear around a road side in the IPM image
(Fig. 4). First, the IPM edge image that emphasizes
slant edges on road side objects is created. Next, the
degree of road boundary whose value increases at the
boundary with the dense areas of slant edges is calcu-
lated in each pixel of the IPM edge image. Finally, the
road boundary is tracked by the Snakes whose image
force is the degree of road boundary.
3 CREATION OF IPM IMAGE
The inverse perspective mapping (IPM) image, which
overlooks a road surface, is created by inverse per-
spective transform. A point (x, y) in the image co-
ordinate system and a point (u, v) in the IPM image
coordinate system satisfy
(u, v) = (RX
x −V
px
y −V
py
,
RY
2
y −V
py
−
RY
2
y
lim
), (1)
where (V
px
,V
py
) is the position of a vanishing point
in the image coordinate system, RX and RY are com-
pression or expansion rates for direction x and y, and
y
lim
is the lower limit of y-coordinate value in the im-
age(T. Yasuda and K. Onoguchi, 2012). Figure 5(b)
shows the IPM image created from Fig. 5(a). Param-
eters (V
px
,V
py
), RX, RY and ylim are calibrated when
the camera is installed in the vehicle. Unless the cam-
era position changes, these parameter are fixed. In ex-
Figure 4: Projection of vertical edges.
(a) Input image
(b) IPM image
Figure 5: Inverse perspective mapping.
periments, the IPM image whose size is 640 × 480 is
created from an input image whose size is 640 × 480.
4 CREATION OF IPM EDGE
IMAGE
In the smooth snow surface, both a road side and a
road surface contain only weak texture in the IPM im-
age, as shown in Fig. 6(b). To emphasize slant edges
around a road side, the IPM edge image E
AND
(u, v) is
created by the below preprocessing.
1. The vertical edge image E
v
(x, y) (Fig. 6(c)) is cre-
ated by applying the Sobel operator to the input
image I(x, y) (Fig. 6(a)). (x, y) is the coordinate
value of an image.
2. E
v
(x, y) is converted to the IPM image E
ipm
v
(u, v)
(Fig. 6(d)). (u, v) is the coordinate value of the
Road Boundary Detection using In-vehicle Monocular Camera
381

IPM image.
3. The slant edge image E
ipm
s
(u, v) (Fig. 6(e)) is cre-
ated by applying the Sobel operator to the IPM
image of I(x, y) (Fig. 6(b)).
4. The AND image E
AND
(u, v) of E
ipm
v
(u, v) and
E
ipm
s
(u, v) is created as the preprocessing im-
age for road boundary detection. Figure 6(f)
shows E
AND
(u, v) obtained from E
ipm
v
(u, v) and
E
ipm
s
(u, v).
Vertical edges on a roadside object are converted
into slant edges in the IPM image. On the other hand,
there are not many vertical edges on the road surface
converted into slant edges. Therefore, in E
AND
(u, v),
slant edges around a road side remains but slant edges
on a road surface are suppressed.
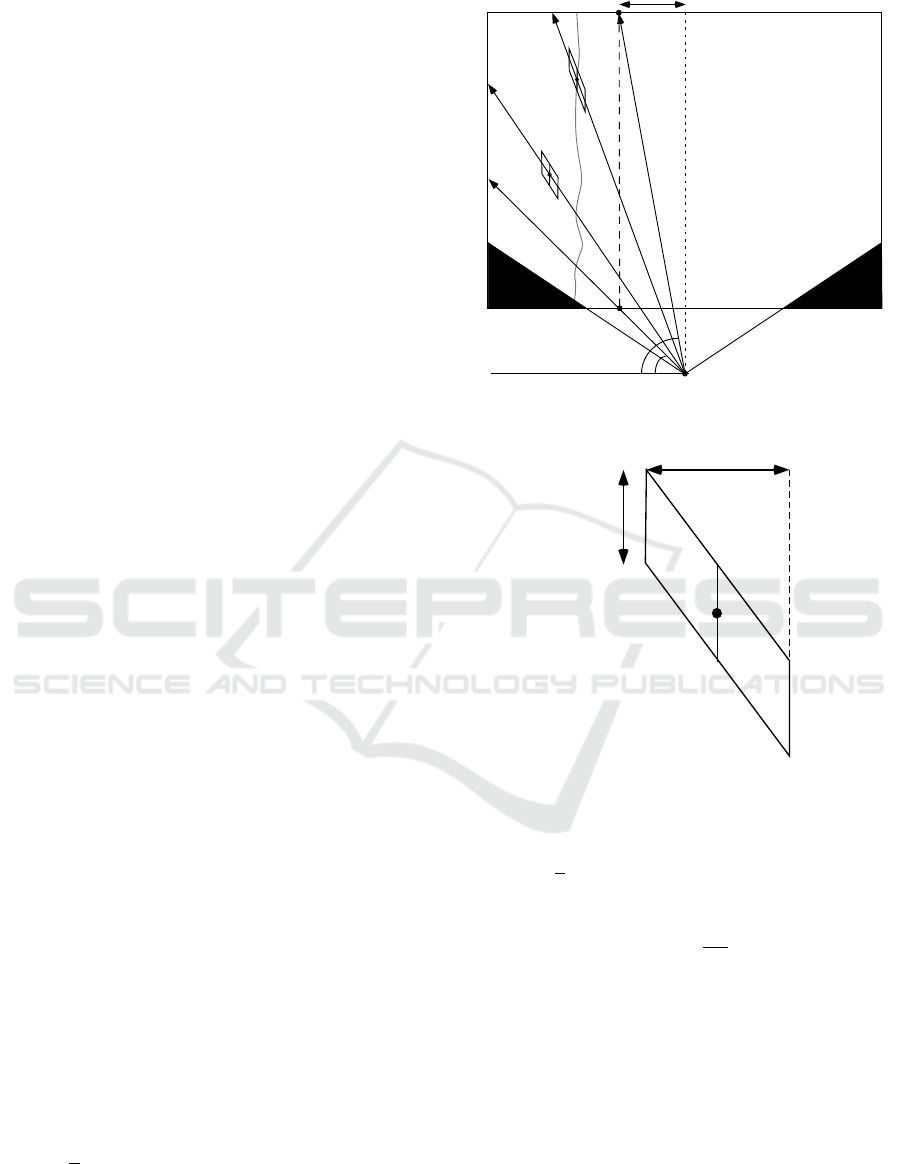
5 THE DEGREE OF ROAD
BOUNDARY
The vertical edge on the road side object is projected
as a shape falling backward radially around the cam-
era position, as shown in Fig.4. Therefore, in each
pixel of the IPM edge image, a parallelogram shaped
mask is set along a straight line L
cp
connecting the
camera position C and each pixel P, as shown in Fig.7.
When parameters V
x
, V
y
, RX, RY and y
lim
for creating
the IPM image are fixed, the straight line L
cp
can be
determined in advance. An enlarged view of a par-
allelogram shaped mask is shown in Fig.8. Let the
length of the left and right sides of a mask be H, the
width between the left and right sides be W, the region
on the left side of the point P be R
W
and the region on
the right side of the point P be R
B
.
The road boundary is located on the left side of
the IPM image since vehicles drive on the left side of
the road in Japan. Since slant edges usually appear
densely on road side objects in the IPM edge image,
the number of edges in R
W
is large and the number
of edges in R
B
is small if the pixel P is around the
road boundary. For this reason, at each pixel P on the
left half of the IPM edge image, the degree of road
boundary BD is calculated by
BD =
(N
W
+ (S
B
− N
B
)
S
W
+ S
B
, (2)
where N
W
is the number of edges in R
W
, N
B
is the
number of edges in R
B
, S
w
is the total number of pix-
els of R
w
and S
N
is the total number of pixels of R
N
.
The degree of road boundary BD increases around the
road boundary since it shows large value when N
W
is
large and N
B
is small.
(a) Smooth snow surface
(b) IPM image
(c) E
v
(x, y)
(d) E
ipm
v
(u, v)
(e) E
ipm
s
(u, v)
(f) E
AND
(u, v)
Figure 6: Road boundary in smooth snow surface.
Since the camera position C is determined by
straight lines k
1
k
2
and k
3
k
4
indicating the bottom of
the IPM image as shown in Fig. 7, the slope θ of the
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
382
straight line L
cp
connecting the camera position C and
each pixel P can be calculated in advance. Therefore,
our method speeds up the calculation of N
W
and N
B
by
creating the table describing the information of paral-
lelogram shaped mask at each point P. At each pixel
P, the same W and H are used for the parallelogram
mask. The search angle around C is θ
1
< θ < θ
2
and
the degree θ is quantized in an integer value. Since
the parallelogram in the digital image is approximated
like a step as shown in Fig. 9, the shape of the paral-
lelogram mask generated by the parameter (W, H, θ)
is limited to several patterns T
k
(k = 0, . . . , n − 1). The
number of patterns n is uniquely determined when
W, H, θ
1
and θ
2
are fixed.
At the pixel t
i
(u
i
, v
i
)(i = 0, 1, . . . , w − 1) on the up-
per side of each pattern T
k
, a relative coordinate value
(u
i
− u, v
i
− v) with the center P(u,v) of the mask is
calculated. Then, the table PT
u
(k, i)(0 ≤ k < n, 0 ≤
i < W − 1) in which u
i
− u is stored and the table
PT
v
(k, i)(0 ≤ k < n, 0 ≤ i < W − 1) in which v
i
− v
is stored are created for parallelogram shaped mask.
At each pixel P(u, v) of the IPM edge image in
the range of θ
1
< θ < θ
2
, the slope θ of the straight
line L
cp
is calculated in advance, and the index k of
the pattern T
k
corresponding to the angle θ is written
to two-dimensional array IA(u, v) whose size is same
as the IPM edge image. θ
1
and θ
2
are determined by
manually selecting the upper end A
max
and the lower
end A
min
of the shoulder in the IPM image which is
created from a vehicle parked on the shoulder (Fig.7).
In order to count the number of edges at high
speed, the line integral image S(u, v)(0 ≤ u <
W
IPM
, 0 ≤ v < H
IPM
) in the vertical direction is cre-
ated by applying the equation (3) to the IPM edge im-
age E
AND
(u, v)(0 ≤ u < W
IPM
, 0 ≤ v < H
IPM
).
S(u, v) =
v
∑
i=0
E
AND
(u, i) (3)
Using the line integral image S(u, v), the number of
edges E
num
on the vertical line between the red pixel
t
i
(u
i
, v
i
) and the green pixel e
i
(u
i
, u
i
+ H) in Fig. 9 is
calculated by the equation (4).
E
num
= S(u
i
, v
i
+ H) − S(u
i
, v
i
) (4)
Therefore, at each pixel P(u, v) of the IPM edge
image, N
W
and N
B
in the equation (2) are given by
equations 5 and 6 when IA(u, v) is equal to k.
N
W
=
W
2
−1
∑
i=0
(S(u + PT
u
(k, i), v + PT
v
(k, i) + H)
−S(u + PT
u
(k, i), v + PT
v
(k, i))) (5)
Figure 7: The degree of road boundary.
Figure 8: Parallelogram shaped mask.
N
B
=
W −1
∑
i=
W
2
(S(u + PT
u
(k, i), v + PT
v
(k, i) + H)
−S(u + PT
u
(k, i), v + PT
v
(k, i))) (6)
Since both S
W
and S
B
are
W H
2
, the degree of road
boundary BD is calculated from equations (2), (5) and
(6). Figure 10(b) shows the example of the degree of
road boundary BD calculated from the IPM edge im-
age shown in Fig. 10(a). In this image, an BD is quan-
tized in the range from 0 and 255, and high intensity
shows high degree of road boundary.
6 ROAD BOUNDARY TRACKING
Our method detects and tracks the road boundary
by Snakes(M. Kass, A. Witkin and D. Terzopoulos,
Road Boundary Detection using In-vehicle Monocular Camera
383
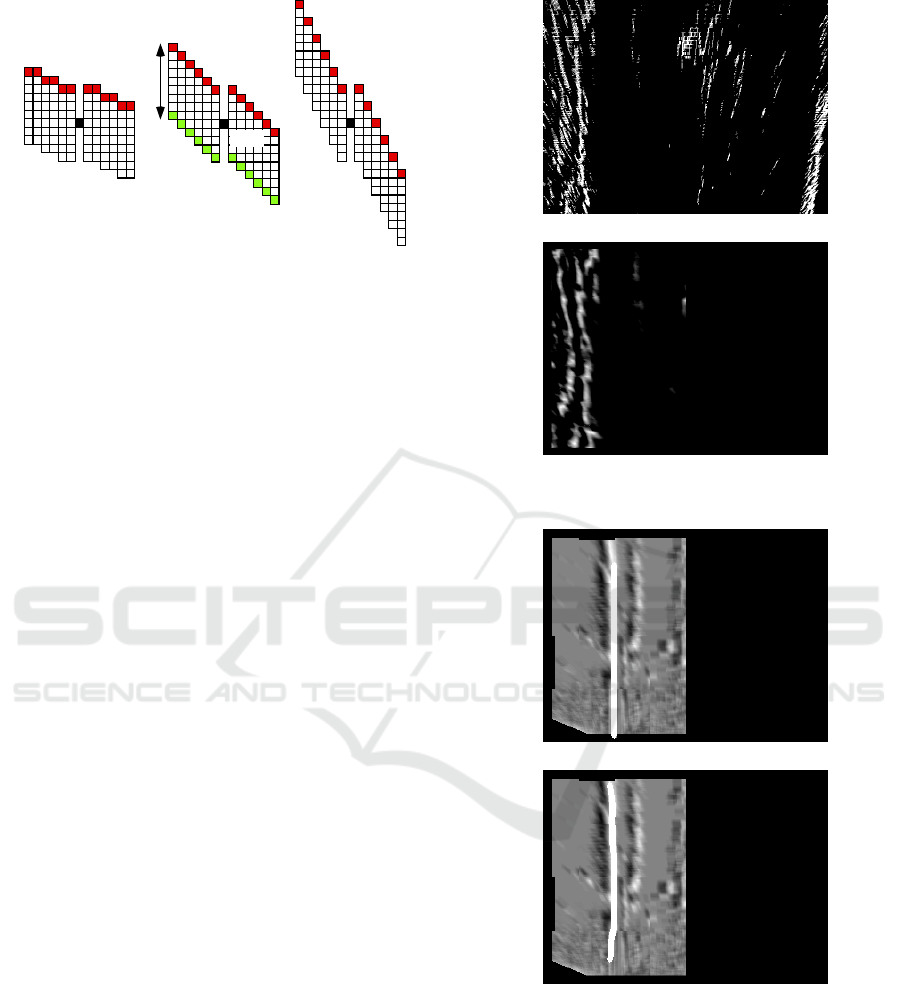
Figure 9: Parallelogram shaped mask in digital image.
1988) whose image force is the degree of road bound-
ary BD. First, in the BD image such as Fig. 10(b),
the intensity is accumulated vertically and the vertical
line passing through the peak is used as the initial po-
sition of the Snakes as shown in Fig. 11(a). The num-
ber of control points is 61 and the number of updates
is 10 per frame. Figure 11(b) shows the convergence
result of the Snakes.
7 EXPERIMENTS
We conducted experiments to detect the road bound-
ary from images taken by an in-vehicle monocular
camera. The KITTI dataset(KITTI, ) and our own
dataset including snow road scenes were used for
qualitative and quantitative evaluation.
7.1 Qualitative Evaluation
Figure 12 show some experimental results using the
KITTI dataset. Since Japanese roads are on the right
side, we detected the road boundary in the mirror im-
age. In each figure, the left is the detection result over-
laid on the input image with a magenta line and the
right is the ground truth of the road surface shown in
KITTI dataset. In Fig. 12(a), the curb is detected as
the road boundary correctly. In Fig. 12(c), the bound-
ary between the road surface and the roadside grass is
detected correctly. In Fig. 12(e), The boundary with
the parked vehicle is correctly detected.
Since snow road scene is not included in the
KITTI dataset, we built the dataset containing vari-
ous roads covered with snow. We call this dataset
HRB(Hirosaki Road Boundary) dataset. Figure 13
shows some experimental results using HRBD. In
each figure, the left is the detection result and the
right is the ground truth set manually in the IPM im-
age. The HRB dataset also contains road boundaries
such as the curb, the roadside grass and so on other
than snowy road. In Fig. 13(a) and (c), the curb
(a) IPM edge image
(b) The degree of road boundary
Figure 10: Example of the degree of road boundary.
(a) Initial position of Snakes
(b) Convergence result
Figure 11: Tracking result of road boundary.
and the roadside grass are detected correctly. Figure
13(e) shows the result in a sherbet-like snow surface,
Fig. 13(g) shows the result in a smooth snow surface
and Fig. 13(i) shows the result in the scene where
the road surface is not covered with snow but a lane
marker is occluded by the snow side wall. Although
lane markers are invisible in these scenes, the bound-
ary between the snow side wall and a road surface is
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
384
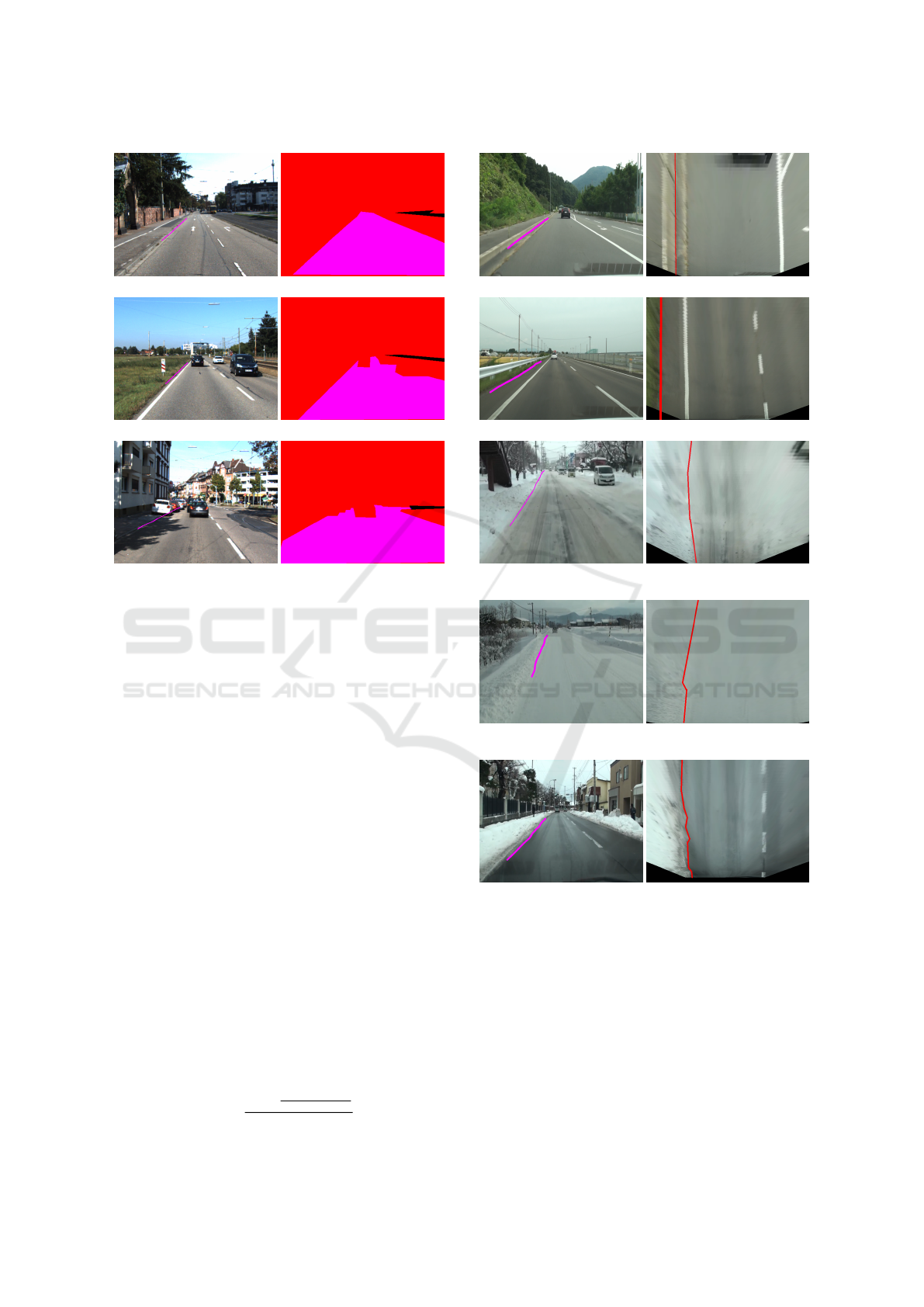
(a) Curb (b) Curb(Ground Truth)
(c) Grass (d) Grass(Ground Truth)
(e) Parked vehicle (f) Parked vehicle(Ground
Truth)
Figure 12: Results of road boundary detection (KITTI
dataset).
detected correctly as a boundary of the driving lane.
7.2 Quantitative Evaluation
We evaluated the performance of the proposed
method quantitatively in the KITTI dataset and the
HRB dataset.
In the KITTI dataset, images containing road side
objects such as curbs, grasses, vehicles and so on were
used for evaluation. 127 frames of the curb and 56
frames of the other road side object including parked
vehicles were evaluated. Only the left side of the driv-
ing lane in the mirror image was compared with the
ground truth tracing the left boundary of the true road
area shown in the KITTI dataset.
The HRB dataset contains 100 frames of the curb,
161 frames of the road side grass and 142 frames of
the snow side wall. The ground truth was obtained by
tracing the road boundary manually in the IPM image.
The detection accuracy DA given by the equation
(7) is estimated in the IPM image. Therefore, the
ground truth for the KITTI dataset is projected onto
the IPM image.
DA =
∑
n−1
i=0
|p
u
(i)−pt
ux
(i)|
LaneWidth
n
(7)
(a) Curb (b) Curb(Ground Truth)
(c) Grass (d) Grass(Ground Truth)
(e) Sherbet-like snow surface (f) sherbet-like snow sur-
face(Ground Truth)
(g) Smooth snow surface (h) Smooth snow sur-
face(Ground Truth)
(i) Wet surface (j) Wet surface(Ground
Truth)
Figure 13: Results of road boundary detection (HRB
dataset).
Where p
u
(i) is the u coordinate value of the control
point calculated by the snakes, pt
u
(i) is the u coor-
dinate value of the ground truth whose v coordinate
value is same as p
u
(i), n is the number of the control
points in the Snakes and LaneWidth is the width of
the driving lane in the IPM image.
Table 1 shows the detection accuracy DA in the
KITTI dataset. The average DA of all scenes is 0.088.
Road Boundary Detection using In-vehicle Monocular Camera
385
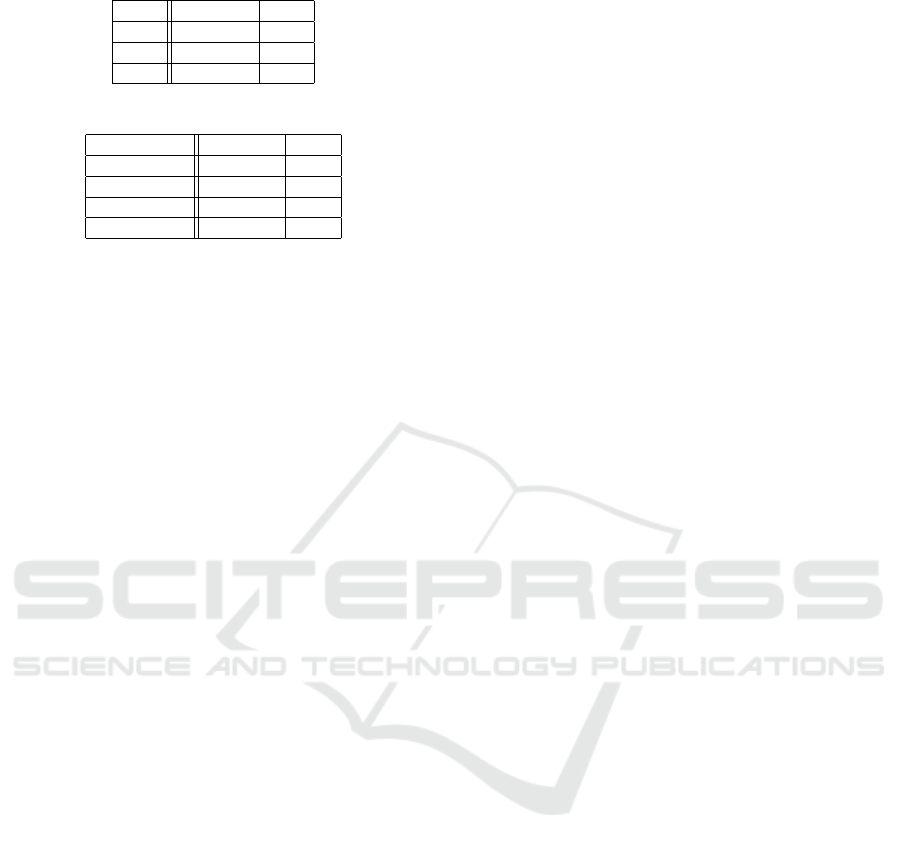
Table 1: Detection accuracy (KITTI dataset.)
# of frames DA
Curb 127 0.095
Other 56 0.071
Total 183 0.088
Table 2: Detection accuracy (HRB dataset.)
# of frames DA
Curb 100 0.046
Grass 161 0.118
Snow side wall 142 0.080
Total 403 0.087
This result shows that the error of 0.27m occurs when
the width of the driving lane is about 3m. However,
this result shows that a vehicle has some space to run
in the driving lane if the vehicle width is less than
2.5m. Therefore, the proposed method can also be
applied to ordinary vehicles.
Table 2 shows the detection accuracy DA in the
HRB dataset. The average DA of all scenes is 0.087
and DA of the snow side wall is 0.08. This result
shows that the proposed method is effective for road
boundary detection on snowy roads.
8 CONCLUSION
This paper proposed the method to detect the shoulder
line of a road including the boundary with the snow
side wall from an image of an in-vehicle monocular
camera. Vertical lines on an object whose height is
different from a road surface are projected onto slant-
ing lines when an input image is mapped to a road
surface by the inverse perspective mapping. The pro-
posed method detects a road boundary using this char-
acteristic. In the IPM edge image, the degree of road
boundary that responds strongly at the boundary with
the area where slant edges are dense is calculated
by using the parallelogram shaped mask. The road
boundary is tracked by the Snakes whose image force
is the degree of road boundary. Experimental results
using the KITTI dataset and our own dataset including
snow scenes show the effectiveness of the proposed
method. The future work is to improve the detection
accuracy of distant shoulder.
REFERENCES
A. Laddha, M. K. Kocamaz , L. E. N-serment, and M.
Hebert (2016). Map-supervised road detection. In
Proceedings of IV2016.
B. Hillel, R. Lerner, D. Levi, and G. Raz (2014). Recent
progress in road and lane detection: A survey. Ma-
chine Vision and Applications, 25(3):727–745.
C. Brust, S. Sickert, M. Simon, E. Rodner and J. Denzler
(2015). Convolutional patch networks with spatial
prior for road detection and urban scene understans-
ing. In Proceedings of VISAPP2015.
C. Guo, J. Meguro, Y. Kojima and T. Naito (2013). Cadas: a
multimodal advanced driver assistance system for nor-
mal urban streets based on road context understand-
ing. In Proceedings of IV2013, pages 228–235.
C. Kreucher and S. Lakshmanan (1999). Lana: A lane
extraction algorithm that uses frequency domain fea-
tures. IEEE Trans. on Robotics and Automation,
15(2):343–350.
D. Costea and S. Nedevschi (2017). Traffic scene segmen-
tation based on boosting over multimodal low, inter-
mediate and high order multi-range channel features.
In Proceedings of IV2017.
D. Hoiem, A. A. Efros and M. Hebert (2007). Recovering
surface layout from an image. International Journal
of Computer Vision, 75(1):151–172.
D. Levi, N. Garnett and E. Fetaya (2015). Stixelnet: A depp
convolutional network for obstacle detection and road
segmentation. In Proceedings of BMVC2015.
D. Pfeiffer and U. Franke (2010). Efficient representation
of traffic scenes by means of dynamic stixels. In Pro-
ceedings of IV2010, pages 217–224.
G. L. Oliveira, W. Burgard and T. Brox (2016). Efficient
deep models for monocular road segmentation. In
Proceedings of IROS2016, pages 586–595.
G. Thomas, N. Jerome and S. Laurent (2010). Frequency
filtering and connected components charaterization
for zebra-crossing and hatched markings detection.
In Proceedings of ISPRS Commision III Symposium,
pages 43–47.
J. C. McCall and M. M. Trivedi (2006). Video-based lane
estimation and tracking for driver assistance: Survey,
system, and evaluation. IEEE Trans. on Intelligent
Transportation Systems, 7(1):20–37.
J. K. Suhr and H. G. Jung (2013). Noise resilient road sur-
face and free space estimation using dense stereo. In
Proceedings of IV2013, pages 461–466.
J. M. Alvarez, T. Gevers and A. M. Lopez (2010). 3d
scene priors for road detection. In Proceedings of
CVPR2010.
J. M. Alvarez, T. Gevers, Y. LeCum and A. M. Lopez
(2012). Road scene segmentation from a single im-
age. In Proceedings of ECCV2012, pages 376–389.
J. M. Alvarez, Y. LeCum, T. Gevers and A. M. Lopez
(2012). Semantic road segmentation via multi-scale
ensembles of learned features. In Proceedings of
ECCV2012, pages 586–595.
J. Siegemund, D. Pfeiffer, U. Franke and W. Forstner
(2010). Curb reconstruction using conditional random
fields. In Proceedings of IV2010, pages 203–210.
J. Zhang and H. Nagel (1994). Texture-based segmentation
of road images. In Proceedings of IV1994.
J.Douret, R. Labayrade, J. Laneurit and R. Chapuis (2005).
A reliable and robust lane detection system based on
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
386

the parallel use of three algorithms for driving safety
assistance. In Proceedings of IAPR Conference on
Machine Vision Applications, pages 398–401.
KITTI. The KITTI Vision Benchmark Suite.
http://www.cvlibs.net/datasets/kitti/index.php.
M. A. Turk, D. G. Morgenthaler, K. D. Gremban and M.
Marra (1988). Vita-a vision system for autonomous
land vehicle navigation. IEEE Trans. on Pattern Anal-
ysis and Machine Intelligence, 10(3).
M. Bertozzi, A. Broggi, M. Cellario, A. Fascioli, P. Lom-
bardi and M. Porta (2002). Artificial vision in road
vehicles. Proceedings of the IEEE, 90(7):1258–1271.
M. Bertozzi and A. Broggi (1998). Gold: A parallel real-
time stereo vision system for generic obstacle and lane
detection. IEEE Trans. on Image Processing, 7(1):62–
81.
M. Enzweiler, P. Greiner, C. Knoppel and U. Franke (2013).
Towards multi- cue urban curb recognition. In Pro-
ceedings of IV2013, pages 902–907.
M. Kass, A. Witkin and D. Terzopoulos (1988). Snakes:
Active contour models. International Journal of Com-
puter Vision, 1(4):321–331.
M. Meuter, S. Muller-Schneiders, A. Mika, S. Hold, C.
Numm and A. Kummert (2009). A novel approach
to lane detection and tracking. In Proceedings of
ITSC2009, pages 582–587.
N. Einecke and J. Eggert (2013). Stereo image warping
for improved depth estimation of road surfaces. In
Proceedings of IV2013, pages 189–194.
R. Mohan (2014). Deep deconvolutional networks for scene
parsing. In ArXiv.org.
S. Hold, S. Gormer, A. Kummert, M. Meuter, S. Muller-
Schneiders (2010). Ela - an exit lane assistant for
adaptive cruise control and navigation systems. In
Proceedings of ITSC2010, pages 629–634.
T. Yasuda and K. Onoguchi (2012). Lane estimation based
on lane marking recognition. In Proceedings of ITS
World Congress 2012.
Z. W. Kim (2008). Robust lane detection and tracking
in challenging scenarios. IEEE Trans. on Intelligent
Transportation Systems, 9(1):16–26.
Road Boundary Detection using In-vehicle Monocular Camera
387
