
Towards Interactive Mining of Understandable
State Machine Models from Embedded Software
Wasim Said
1,2
, Jochen Quante
1
and Rainer Koschke
2
1
Robert Bosch GmbH, Corporate Research, Renningen, Germany
2
University of Bremen, Germany
Keywords:
Model-driven Engineering, Program Comprehension, Software Analysis, Reverse Engineering, Model
Mining.
Abstract:
State machines are an established formalism for specifying the behavior of a software component. Unfortu-
nately, such design models often do not exist at all, especially for legacy code, or they are lost or not kept up to
date during software evolution – although they would be very helpful for program comprehension. Therefore,
it is desirable to extract state machine models from code and also from legacy models. The few existing ap-
proaches for that – when applied to real-world systems written in C – deliver models that are too complex for
being comprehensible to humans. This is mainly because C functions are typically much longer than object
oriented methods, for which these approaches were originally intended.
In this paper, we propose and investigate different measures to reduce the complexity of such mined models
to an understandable degree. Since the code alone does not contain all required information for abstraction,
user interaction is essential. Also, different users will be interested in different aspects of the code. There-
fore, we introduce several possibilities for influencing the state machine extraction process, such as providing
additional constraints for reducing the state space. We show the effectiveness of these interactions in several
case studies. The combination of these interactions gives the user a rich set of possibilities for exploring the
functionality of the software.
1 INTRODUCTION
Model mining is the extraction of behavioral and/or
structural models from existing software systems. For
example, a lot of tools exist for extracting UML class
diagrams from Java code. These tools extract explicit
structural information from the code and bring them
into a different (graphical) form. The resulting mod-
els are quite helpful for getting an overview and un-
derstanding at a higher (design) level. We are inter-
ested in extracting more implicit information that is
not explicitly visible in the code. An example for that
is the extraction of a state machine model from C code
when no explicit state machine pattern can be found
in the code.
Having such higher-level models can help de-
velopers in several ways. Firstly, it helps in pro-
gram comprehension: Developers often try to man-
ually reconstruct such models during maintenance
tasks (Roehm et al., 2012). This is a quite time-
consuming activity: Program comprehension makes
up for 40%-50% of total software life cycle ef-
fort (Fjeldstad and Hamlen, 1984). Secondly, model
mining can also be a great support for migration
towards model-based software development. Since
companies that want to switch to model-based devel-
opment usually do not start from scratch, but already
have a large code base, extraction of models from
legacy code would be quite helpful. For example,
model-based development tools such as ASCET
1
or
Matlab Simulink
2
have been introduced at almost all
automotive companies. Their block diagram models
provide an adequate basis for implementation of con-
trol systems and thus help to save cost and time (Broy
et al., 2013). However, only new functions are usu-
ally implemented based on these models. The exist-
ing code base already realizes a huge amount of func-
tionality and cannot be easily replaced by correspond-
ing models. Model mining can support this transfor-
mation and even make it economically worthwhile.
Thirdly, even when developing exclusively based on
models, developers do not always use the best-suited
1
https://www.etas.com/en/products/ascet_software_pro
ducts.php
2
https://www.mathworks.com/products/simulink.html
Said, W., Quante, J. and Koschke, R.
Towards Interactive Mining of Understandable State Machine Models from Embedded Software.
DOI: 10.5220/0006593501170128
In Proceedings of the 6th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2018), pages 117-128
ISBN: 978-989-758-283-7
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
117

models for a given aspect. For example, control logic
is sometimes modelled as a block diagram – which
makes the aspect “control logic” very hard to under-
stand. The extraction of the behavior of a function
with respect to control logic in form of a state ma-
chine is then very desirable and helpful for experts –
for both legacy code and models.
state != 0 [sig != 0]
state == 0
[sig == 0] [sig != 0]
[sig == 0]
Figure 1: Extracted state machine for example function.
As a simple example for state machine extraction,
consider the following C code:
int biEdge(int sig) {
static int state = 0;
if ((sig && !state) || (!sig && state)) {
state = sig;
return 1;
}
return 0;
}
The static variable state is the only variable that
holds state, and it is used in the conditions state and
!state. Consequently, a state machine representa-
tion of this code would distinguish between these two
states. Figure 1 shows the resulting state machine. Al-
though simple in this example, this kind of model ex-
traction can be very laborious. This is the case when
more state variables and conditions are involved, or
when they are interleaved with other code that is not
relevant for state in a larger function. Therefore, au-
tomation of this process is highly desired. However,
fully-automatic model extraction from real world sys-
tems results in information on the wrong level: The
automatically mined models are typically too detailed
and low-level, because code alone does not contain
all the necessary information. For example, there is
no information about which details are important and
which are not. Also, a tool is not capable of intro-
ducing abstractions that a human would immediately
come up with. Consequently, effective model min-
ing requires a combination of automation and interac-
tion. The automated part must be able to utilize expert
knowledge and feedback, so that it is capable of ex-
tracting highly useful models with low manual effort.
Our approach for an interactive state machine ex-
traction process is as follows: The developer has some
function which he wants to understand with respect
to sequencing logic. He then starts the model min-
ing process on this function and gets an initial result,
which usually is far too complex to be understand-
able. Now he has several options to reduce the com-
plexity of this state machine. For example, he can se-
lect a subset of state variables for the state machine
model or join certain states. Alternatively, he can
provide additional constraints – for example, set vari-
ables to certain values, or limit their ranges. The min-
ing tool then returns a different state machine model
– one that considers this additional information. This
interactive process can go through multiple iterations
with changed user input. In any case, the resulting
model will be more abstract and potentially closer to
the domain and thus less complex. When interactively
working with the model extraction process this way,
the developer can extract understandable state ma-
chines for different scenarios which in combination
can provide a complete picture of the relevant func-
tionality.
Our contributions in this paper are the following:
• An adaption of an existing (Kung et al., 1994; Sen
and Mall, 2016) state machine mining approach
for procedural code.
• Several automatic techniques for simplification of
the extracted models.
• A set of interactive state machine mining exten-
sions for reducing the state space of extracted
models.
• Demonstration of the effectiveness of these mea-
sures for making the resulting models understand-
able.
• First feedback from experts about usefulness of
the resulting models.
The rest of the paper is organized as follows. The
required background about static analysis techniques
and the approaches of Kung and Sen are introduced
in Section 2. Our adaptations and optimizations of
Kung/Sen’s approach are presented in Section 3. Sec-
tion 4 explains our different techniques for interactive
exploration of state machines. The case studies are
presented in Section 5. In Section 6, we discuss the
approach and results. An overview of related work is
presented in Section 7, and Section 8 concludes.
2 BACKGROUND
In this section, we present an overview of analysis
techniques that are used in our approach.
2.1 Symbolic Execution
One widely used and effective static analysis tech-
nique is symbolic execution. The idea behind it is the
MODELSWARD 2018 - 6th International Conference on Model-Driven Engineering and Software Development
118

execution of a program with symbolic values instead
of concrete values. Traditional symbolic execution
performs path enumeration for test case generation
with full path coverage (King, 1976). When symbolic
execution comes to a branching point, all branches are
explored in a depth-first search manner. The valid
conditions at each branching point are collected and
stored with the corresponding path. The technique
backtracks when it comes to a point where the path
condition is not satisfiable, i. e., when the path be-
comes infeasible. For every possible path through
the program, this technique delivers the path condi-
tion (PC) and the output variable values as symbolic
expressions over the input variables. All possible dis-
tinct behavior of the function is therefore described
with just a single control condition – the path condi-
tion. As stateful behavior means different behavior
depending on state, this information provides a good
basis for deriving state machines: States are contained
in path conditions, and each path corresponds to a cer-
tain transition.
2.2 Kung/Sen Approach to State
Machine Mining
Kung et al. (Kung et al., 1994) describe how sym-
bolic execution can be used to derive a state machine
representation from a given C++ class. Sen and Mall
(Sen and Mall, 2016) add some improvements and
work on Java classes. To explain the approach, let
us first define some terms that were introduced by
Kung. An atomic condition is either a boolean sym-
bolic variable such as a or a relational operator over
two symbolic expressions such as (a + b < 5). Con-
necting atomic conditions by conjunction, disjunction
or negation creates a compound condition, such as
((a + b > 5) ∧ d). A conditional literal is an atomic
condition or the negation of an atomic condition.
The approach works in three steps: First, sym-
bolic execution is performed. It generates the path
conditions, pairs of updated member variables during
the execution of each path and the returned symbolic
expression (if any). In a second step, states are gen-
erated from that, and in the third step, transitions are
determined.
Extraction of States
Kung’s state generation approach examines all path
conditions and considers only conditional literals that
contain exactly one member variable. For each such
conditional literal, it partitions the variable’s domain
into intervals. The cross product of the intervals of all
member variables then generates the states and their
invariants.
For example, imagine that x is an integer vari-
able and occurs in the conditional literals (x > 0) and
(x = 3). The relevant intervals of x, according to Kung
et al., are (−∞, 0], (0, 3), [3, 3] and (3, ∞). This ap-
proach works only on conditions that contain exactly
one member variable. For conditions with more than
one variable such as (a < b) and (a+b+c > 5), com-
puting the intervals is not possible. These conditions
are ignored by Kung’s approach.
Sen and Mall address this limitation and extract
states from path conditions in a different way. They
directly compute the partitions from the original con-
ditions. Then, they use a solver to find out which
of them are satisfiable; those become the state can-
didates. For the above example, the extracted par-
titions for Sen’s approach are: ((x > 0) ∧ (x = 3)),
((x > 0) ∧ (x 6= 3)), ((x ≤ 0) ∧ (x 6= 3)) and ((x ≤
0) ∧ (x = 3)) (the latter is not satisfiable). It is obvi-
ously also possible to create such partitions for condi-
tional literals with more than one variable.
Sen and Mall distinguish between different types
of conditional literals, depending on the kind of dif-
ferent variables involved (in an object-oriented pro-
gram):
• Member dependent literal (MDL): a conditional
literal in which only member variables of the class
appear.
• Parameter dependent literal (PDL): a conditional
literal in which only parameters of a class method
appear.
• Mixed literal (MXL): a conditional literal which is
neither MDL nor PDL.
Although we do not have member variables in C code
and ASCET models, we stick to these definitions. For
us, members correspond to state candidates (see Sec-
tion 3). Because only MXLs and MDLs are practi-
cally relevant for state machine extraction, we also
use the term pure literal for MDLs. Only MDLs are
considered in Sen’s approach, and only MDLs with a
single variable are considered by Kung. We leave the
choice of including MXLs in the states to the user,
which is discussed later in this paper.
The described state space generation process may
generate a lot of states that can never be reached.
By providing (or extracting from initialization) a set
of potential start states, all states that are not reach-
able from them can be eliminated, and all unreach-
able transitions can be removed as well. Kung et al.
already considered this in the construction of their
state space, but it may as well be performed as a post-
processing step, as we have done in our approach.
Towards Interactive Mining of Understandable State Machine Models from Embedded Software
119

Extraction of Transitions
For transition generation, it is then examined for each
path from which state it can possibly start (pre state
S
pre
). This is again done by using a constraint solver.
It checks for which state candidates Inv
S
pre
∧PC is sat-
isfiable, Inv
S
is the state invariant of state S. The post
state S
post
is determined in different ways. Kung et
al. use the condition Inv
S
pre
∧PC |= Inv
S
post
(E), which
means that the target state condition Inv
S
post
on the re-
sulting symbolic values of the path (E) must be satis-
fied in all cases. Sen just requires that PC ∧ Inv
S
pre
is
satisfiable, and that PC ∧ Inv
S
post
(E) is satisfiable in-
dependently. In our approach, we do not check these
two conditions independently, but we combine them
so that PC ∧ Inv
S
pre
∧ Inv
S
post
(E) must be fulfilled.
2.3 Concolic Testing
Concolic testing is a more recent technique for path
enumeration (Godefroid et al., 2005). The main dif-
ference to symbolic execution is that it does not ex-
plore paths by forking at the branching nodes, but ex-
plores paths sequentially. It executes each path with
concrete values and in parallel collects the symbolic
path condition. The input for the next execution is
inferred from the path conditions of the previous test
cases. This is done using an SMT solver. By negat-
ing the disjunction of all path conditions that were so
far encountered, it generates new values for the input
variables that lead to execution of another path that
has not been covered yet.
For instance, for a branching condition (x > y), the
concrete values could be x = 3 and y = 1 which satis-
fies the constraint and causes the execution of the true
branch. To execute the false branch, concolic testing
tries to generate values that do not satisfy the con-
straint. This can be done by negating the constraint
(x > y) and using a constraint solver to generate val-
ues that satisfy (x ≤ y).
Concolic testing has some advantages over sym-
bolic execution. The key limitation of symbolic ex-
ecution is constraint solving. Some constraints, such
as non linear ones, cannot be handled by solvers. In
concolic testing, complex constraints can be solved
with concrete values in certain cases. See (Hoffmann
et al., 2016) for a detailed discussion of differences
between symbolic execution and concolic testing.
3 ADAPTATIONS
In the following, we present three adaptations of Sen
and Kung’s approaches for our setting. Firstly, our
systems are written in C or ASCET, so we need a dif-
ferent way to identify state variables. Secondly, we
use concolic testing instead of symbolic execution.
Thirdly, we discuss how to deal with mixed literals.
3.1 Adaptation for C Code
The approaches by Kung and Sen both work on
object-oriented software. All member variables that
influence any conditions are potential state candidates
there. In our case, we have to deal with C code or
ASCET models, where there are no natural member
variables. Therefore, we have to come up with addi-
tional heuristics to determine the relevant state can-
didate variables: The variable must keep its value
over multiple invocations, which means it has to be
global or static, and the previously written value has
to be used. Also, it has to influence a control decision
through control or data dependencies. Otherwise, it
does not hold state.
3.2 Use of Concolic Testing
Kung and Sen depend on symbolic execution to per-
form path enumeration and generate test cases. We
use concolic testing instead. Despite the advan-
tages as discussed in Section 2.3, concolic testing
also better supports our interactive extensions, such
as adding user constraints or reducing state variable
range. These interactions are implemented by feed-
ing additional constraints into the state machine min-
ing process. Concolic testing solves constraints incre-
mentally with every newly encountered path. It deals
with additional constraints from a user the same way,
which is quite efficient. Consequently, concolic test-
ing is the more adequate choice for this use case.
3.3 Mixed Literals
Reduction to the relevant state variables may be
achieved by investigating the conditions on these state
variable candidates: if all conditional literals in which
a state variable occurs are MXLs, the state would
always be changed according to the input variable’s
value. For example, consider the following function:
int changed(int x) {
static int old = 0;
if (x != old) {
old = x;
return 1;
}
return 0;
}
The resulting states would be x = old and x 6= old.
However, the state after a call to this function always
MODELSWARD 2018 - 6th International Conference on Model-Driven Engineering and Software Development
120
is x = old, since x is assigned to old. Therefore, it
does not make much sense to consider x = old and
x 6= old as states in this case. Sen et al. always ignore
such mixed variables.
In other cases, these MXLs may carry important
information for the user – they may be helpful for pro-
gram understanding. As an example for that, the state
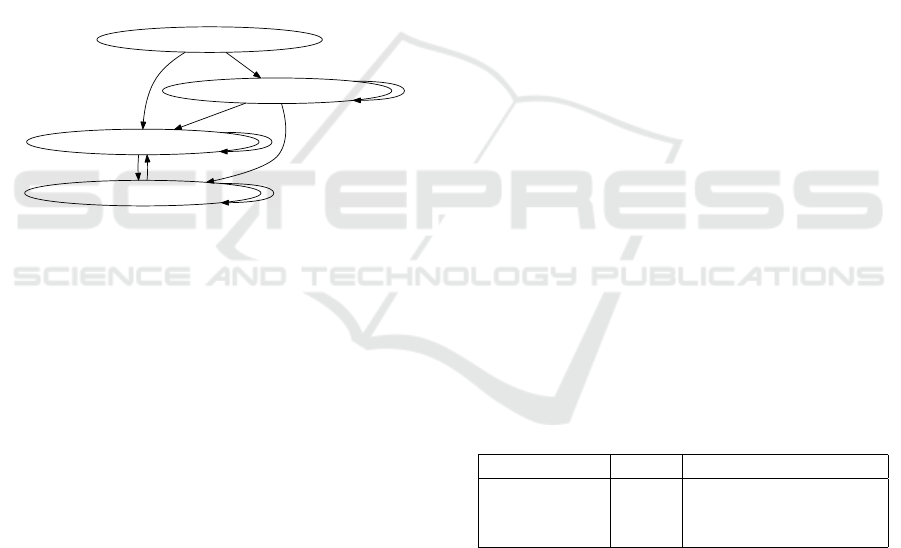
machine model in Figure 2 was extracted from the
test function MON (cf. Section 5) and contains states
with the variables LmpOn and TmMAX. LmpOn is a state
variable, but it occurs in mixed literals with the input
variable TmMAX. The state machine model was reduced
to state variable Timer, which appears only in MDLs,
along with LmpOn, which occurs only in MXLs. The
information about how states can change according
to the input variable shows an interesting fact: Once
LmpOn has become lower or equal to TmMAX, it can
never raise to a value higher than the value of TmMAX
again.
((Timer != 0) && (LmpOn <= TmMAX))
((Timer == 0) && (LmpOn <= TmMAX))
((Timer != 0) && (LmpOn > TmMAX))
((Timer == 0) && (LmpOn > TmMAX))
Figure 2: Example for the potential importance of mixed
literals (function MON).
In Section 5.1, we will demonstrate that ignoring
mixed variables can effectively make state machine
models more understandable. However, because they
can carry important information in some cases such
as the above example, we do not ignore them in our
approach. Instead, we let the expert decide which
input variables remain and which do not. This is
done by presenting a list of all relevant input vari-
ables along with their relevant conditions and letting
the user choose.
4 INTERACTIVE EXPLORATION
One big problem of the approaches of Kung or Sen is
the state space explosion. Their approaches quickly
generate hundreds of states and transitions that a) are
impossible to understand and b) require a long time to
extract. Our goal is to extract state machines that help
in program understanding. To reduce the state ma-
chines’ complexity to a degree that makes them un-
derstandable for humans, we have to come up with
additional measures. In this section, we introduce a
number of interactive approaches to complexity re-
duction. In the evaluation section, we will then in-
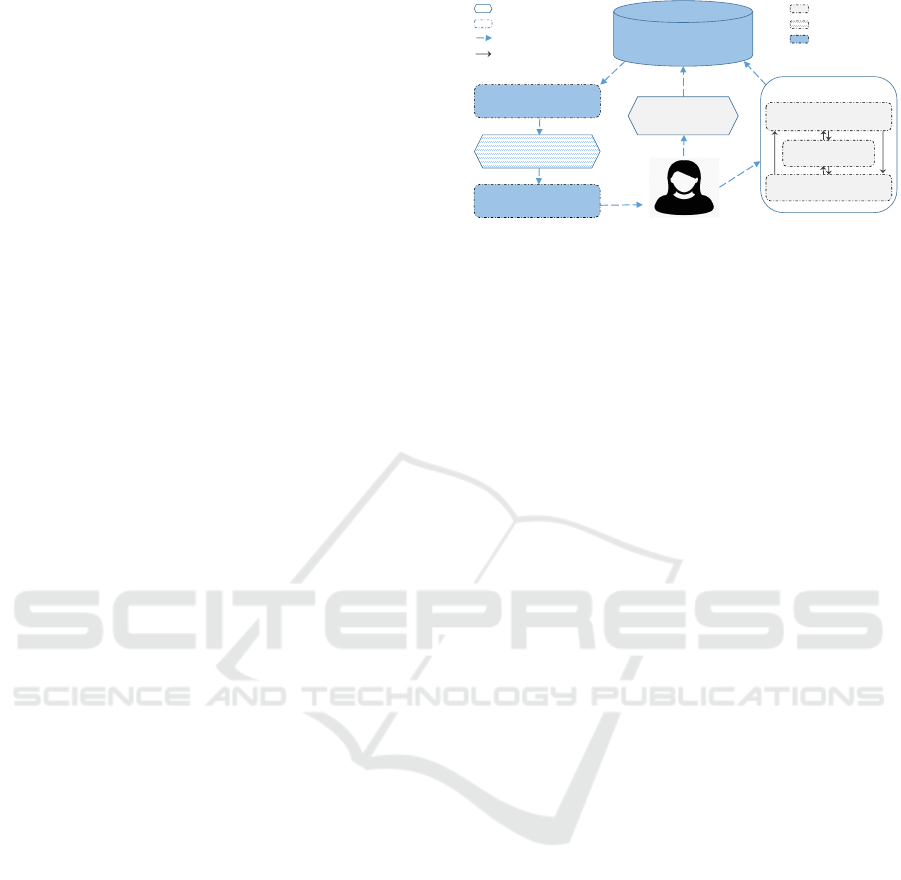
vestigate their effectiveness. An overview of the ex-
traction process and the possible user interactions is
depicted in Figure 3. The different interactions are
presented in detail in the next sections.
4.1 State Variable Subset
The first possibility to reduce the state space is to
manually restrict the relevant state variables to a sub-
set. This should lead to simplified state machines
that can be understood more easily. A comprehen-
sive group of such simplified state machines may still
provide a full picture of a function’s behavior: It does
not make sense to describe the entire functionality of
a larger function in a single diagram, but it is usually
more useful to focus on certain aspects at once – and
abstract away the rest.
In this step, the user is presented the full list of
identified state variables along with their relevant val-
ues or value ranges. She can then select those vari-
ables that are potentially interesting. Table 1 shows
an example how this information is presented. This
interaction corresponds to selecting or deselecting an
entire row in this table.
It may be difficult for the expert to decide which
variables to include and which to ignore just based
on the variables’ names. Therefore, we use program
slicing (Weiser, 1981) to calculate the state variables’
effect size, i. e., how much code (the number of PDG
nodes) is dependent on this state variable. The vari-
ables are sorted by descending effect size, starting
with the most influential one. This can be used by the
expert as an indication of relevance of each variable.
Table 1: Information about the first three state variables,
their effect size and relevant values/ranges for function
SPD.
State variable Effect Values/Partitions
Ctr 0.60 =0 | =1 | =2 | =3 | other
SPD_mode 0.30 =4 | 6=4
Sync 0.27 true | false
4.2 Joining States / Reducing State
Variable Alternatives
Reducing state variable alternatives is another op-
tion to reduce the state space. For example, there
may be conditions “speed in (0, 50)” and “speed in
[50, ∞)”, but the user only wants to distinguish be-
tween (speed = 0) and (speed > 0). The two ranges
that satisfy the condition (speed > 0) are then uni-
fied, leading to a reduced state space as well. As
described in the previous section, the list of relevant
Towards Interactive Mining of Understandable State Machine Models from Embedded Software
121
value or range alternatives for each state variable is
presented to the user. The user can decide to either
ignore or merge certain alternatives for state machine
model extraction based on this information. This cor-
responds to merging different alternatives in column
Values/Partitions in Table 1. The user can also do that
by adding the corresponding constraints, as shown in
the next section.
4.3 Constraints
With a reduced number of paths, the extracted state
machines also become less complex. For example, if
certain variables are set to a fixed value, this may re-
duce the number of paths and thus also the number
of possible states and transitions, and it may reduce
the complexity of state invariants and transition con-
ditions. Another possibility is to generate paths under
more general constraints, such as x = y + 1. Which
constraints make sense largely depends on the system
under consideration.
For instance, the expert may be interested in in-
vestigating the scenario in which the software is in a
certain mode (e. g., “driving”) and the speed is lower
than 20 km/h. Here, mode and speed are state vari-
ables. The expert can also define constraints on non-
state variables, which will also reduce the number of
states and transitions.
For now, we leave it to the expert to decide which
values to restrict or which additional conditions to
consider during the extraction of the state machine.
For example, the expert may want to investigate a sce-
nario where all possible error conditions are excluded.
The decision-relevant conditions on state variables
that are automatically extracted may be helpful to find
out relevant constraints. Automated identification of
meaningful constraints is a topic for future research.
This interaction is supported by the list of vari-
ables that appear in the program. The user can se-
lect variables and their values or ranges of values in
the same way. Additionally, the user can write her
own constraints in the form of expressions on these
variables (plus literals). The constraints can also con-
tain any combination of conjunction, disjunction and
negation. This gives a very high flexibility to the
user’s choice of constraints that she would like to im-
pose on the extraction process and allows her to in-
vestigate arbitrary scenarios.
4.4 Interactive Process
Figure 3 shows the interactive state machine extrac-
tion process. The analysis knowledge base contains
information about all variables, states and transitions
Interaction
Select state variables
of interest
Analysis knowledge base
(all information)
Select/Join states
Add/modify constraints
Manual
Semi-Automatic
Automatic
C code file /
ASCET model
Artifact
Activity
Process sequence
Combination option
Expert
State machine
model
Extraction of relevant
states and transitions
Visualization
Figure 3: Interactive state machine extraction process.
which are automatically extracted from the code. It
also contains the information that is added by the user,
such as constraints or state subsets. The approach
can leverage all this information for extraction, and
the user can iteratively perform any interactions from
above. This will result in a reduced state machine
model according to the user’s needs. With each user
interaction, the extracted model is automatically up-
dated. The process iterates until the user gets the
model that she needs for the task at hand. The dif-
ferent interaction possibilities can be used not only
for general simplification of state machine models,
but also for specific purposes like investigating what-
if scenarios, e. g., by setting some variables to cer-
tain values. These interactions support the extraction
of different projections of the detailed state machine
model. However, they also support reduction of the
original model to a meaningful and comprehensive
model for migration towards model based develop-
ment.
5 CASE STUDY
In order to verify the effectiveness of our approach,
we implemented it in a prototype and used that for
performing several case studies. The implementation
is based on our software analysis framework (Quante,
2016), which includes frontends for C and ASCET,
control/data flow analysis, concolic testing and an in-
terface to the Z3 SMT solver. On top of that, we
implemented Kung/Sen’s approach for state machine
mining with the adaptations as described in Section 3.
Furthermore, we added all interactive extensions that
are presented in Section 4 of this paper.
The studies were conducted using four C code and
five ASCET (A) real world functions from two differ-
ent automotive software systems. Table 2 summarizes
their characteristics. Lg is language, LOC denotes
lines of code (ASCET: ESDL code), MCC is Mc-
Cabe’s cyclomatic complexity, NPATH is Nejmeh’s
static approximation of the number of paths (Ne-
MODELSWARD 2018 - 6th International Conference on Model-Driven Engineering and Software Development
122
jmeh, 1988), and #var is the total number of variables.
These functions were nominated for state machine
model extraction by developers because they found
them to be hard to understand with respect to control
logic.
Table 2: Characteristics of subject functions.
Lg. LOC MCC NPATH #var.
SPD C 807 52 34,560 25
MON C 75 18 41,472 12
AVG C 91 20 262,145 16
VDA C 410 54 863,115 39
PRK A 104 30 284,756 33
RSK A 169 27 147,480 56
VPR A 110 17 10,368 17
SSD A 58 16 2,816 13
PPR A 49 16 86 10
The C functions are part of an engine control soft-
ware. The SPD function is responsible for switching
between different possible input signals when certain
conditions apply. It partly contains an explicit state
machine with a state variable and switch-case con-
struct, but it contains additional distributed logic that
makes it very complicated. The MON function con-
tains a timer and checks whether input signals change
in a certain way within a specified time. The AVG
function calculates several kinds of average signal
values according to a clock signal. VDA is a func-
tion that only becomes active after a certain sequence
of events has occurred. The ASCET models are taken
from another automotive control unit.
The approach as described above – excluding in-
teractive measures, but including our other optimiza-
tions and both pure and mixed literals – results in state
machines as shown in Table 3. Obviously, the models
contain a large number of states and transitions and
thus require a long time for understanding (Miranda
et al., 2005). This means the majority of these models
is too complex for human comprehension.
Table 3: Characteristics of resulting state machines.
#state var. #states #transitions
SPD 6 720 1,652
MON 3 16 64
AVG 6 64 184
VDA 10 6,144 19,127
PRK 4 36 112
RSK 5 48 170
VPR 3 1,157 5,904
SSD 2 32 160
PPR 3 8 16
In the following, we investigate and demonstrate
the effect of different user interactions separately.
However, the use of any combination of these sce-
narios is fully supported and desired. We first con-
centrate on the structure and complexity of the result-
ing state machines regarding the number of states and
transitions. Therefore, we do not show transition con-
ditions in the figures.
5.1 Mixed Literals
In order to demonstrate the effect of ignoring mixed
literals (MXLs) for state generation, we compare the
number of extracted states and transitions from all
state variables of the program, first including MXLs
and MDLs, and then only considering MDLs.
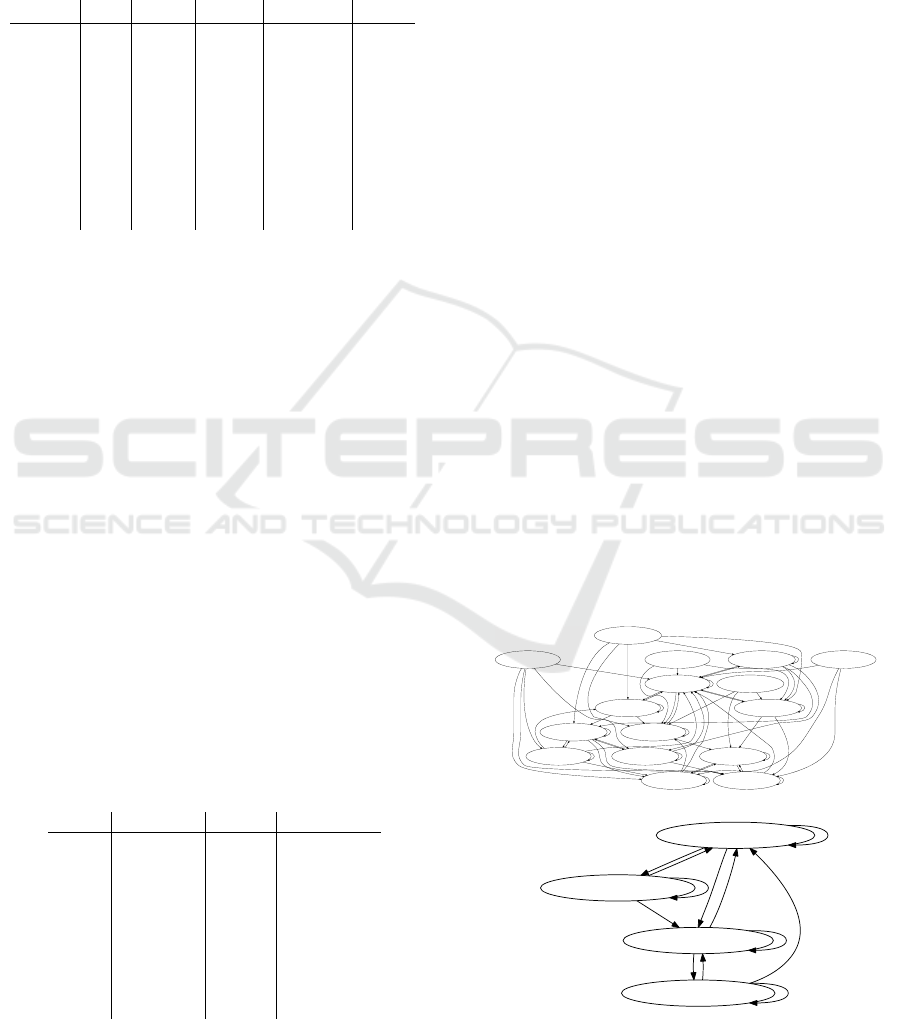
Figure 4 depicts the extracted state machine model
from function MON. There are three state variables
in the code used to generate the state machine model
with and without mixed literals. The model has
16 states and 64 transitions when both pure (MDL)
and mixed literals (MXLs) are used. The structure
of the graph alone is obviously too complex to be
understandable. Using only pure literals reduces the
number of states to four and the number of transitions
to 12. This is because the conditional literals on the
first state variable all depend on input variables, i. e.,
they are all MXLs. One of the two conditions on
the second variable contains input variables. There-
fore, removing these mixed literals results in a state
machine model with only two state variables. The
number of transitions is consequently reduced, be-
cause all transitions from and to the removed states
are also deleted. The resulting state machine is obvi-
ously much less complex, but it still gives a good pic-
ture of which sequences of operation are supported
((((Timer != 0) &&
((currentTime - Timer) <= TmMAX)) &&
Clock) &&
(LmpOn > TmMAX))
((((Timer == 0) &&
((currentTime - Timer) <= TmMAX)) &&
Clock) &&
(LmpOn > TmMAX))
((((Timer == 0) &&
((currentTime - Timer) > TmMAX)) &&
Clock) &&
(LmpOn > TmMAX))
((((Timer == 0) &&
((currentTime - Timer) <= TmMAX)) &&
!Clock) &&
(LmpOn > TmMAX))
((((Timer == 0) &&
((currentTime - Timer) > TmMAX)) &&
!Clock) &&
(LmpOn > TmMAX))
((((Timer != 0) &&
((currentTime - Timer) <= TmMAX)) &&
Clock) &&
(LmpOn <= TmMAX))
((((Timer != 0) &&
((currentTime - Timer) > TmMAX)) &&
Clock) &&
(LmpOn > TmMAX))
((((Timer == 0) &&
((currentTime - Timer) <= TmMAX)) &&
Clock) &&
(LmpOn <= TmMAX))
((((Timer != 0) &&
((currentTime - Timer) <= TmMAX)) &&
!Clock) &&
(LmpOn > TmMAX))
((((Timer != 0) &&
((currentTime - Timer) <= TmMAX)) &&
!Clock) &&
(LmpOn <= TmMAX))
((((Timer == 0) &&
((currentTime - Timer) <= TmMAX)) &&
!Clock) &&
(LmpOn <= TmMAX))
((((Timer != 0) &&
((currentTime - Timer) > TmMAX)) &&
!Clock) &&
(LmpOn > TmMAX))
((((Timer == 0) &&
((currentTime - Timer) > TmMAX)) &&
Clock) &&
(LmpOn <= TmMAX))
((((Timer == 0) &&
((currentTime - Timer) > TmMAX)) &&
!Clock) &&
(LmpOn <= TmMAX))
((((Timer != 0) &&
((currentTime - Timer) > TmMAX)) &&
Clock) &&
(LmpOn <= TmMAX))
((((Timer != 0) &&
((currentTime - Timer) > TmMAX)) &&
!Clock) &&
(LmpOn <= TmMAX))
(a) MDLs and MXLs
((Timer == 0) && !Clock)
((Timer != 0) && !Clock)
((Timer != 0) && Clock)
((Timer == 0) && Clock)
(b) only MDLs
Figure 4: The effect of using only pure literal conditions in
contrast to using pure and mixed ones (function MON).
Towards Interactive Mining of Understandable State Machine Models from Embedded Software
123

by the software, and which are not. For example,
the state ((Timer == 0) && Clock) can only be
reached through ((Timer != 0) && Clock).
The effect of using or not using mixed literals on
the other functions is summarized in Table 4. The
results are presented as a percentage of the original
number of states and transitions (with pure and mixed
conditions and without any user constraint). The first
column shows the number of states (#S) and transi-
tions (#T) with both pure and mixed conditional liter-
als, and the second column shows the same informa-
tion for only pure conditions (as the remaining share
of states and transitions). Function VPR does not have
any pure conditions: All the conditional literals de-
pend on parameters. This emphasizes again that these
conditions cannot always be ignored (cf. Section 3.3).
On the other hand, function PRK has only pure con-
ditions.
Table 4: Model reduction: The effect of using only pure
conditions and user constraints on the number of states and
transitions.
Pure +
Mixed
only
Pure
UserCon
Pure + Mixed
UserCon
only Pure
#S #T %S %T #C %T %T
SPD 720 1652 1 % 2 % 12 1 % 0,5 %
MON 16 64 25 % 18 % 6 81 % 15 %
AVG 64 184 25 % 34 % 4 69 % 17 %
VDA 6144 19127 2 % 2 % 4 45 % 1 %
PRK 36 112 100 % 100 % 5 49 % 49 %
RSK 48 170 4 % 1 % 3 56 % 0,5 %
VPR 1157 5904 0 % 0 % 5 35 % 0 %
SSD 32 160 12 % 10 % 4 63 % 6 %
PPR 8 16 25 % 25 % 2 75 % 18 %
5.2 User Constraints
As mentioned in Section 4.3, the search space (i. e.,
number of paths) can be reduced by generating paths
under additional constraints. The user can add such
constraints. Because she may have no idea about the
analyzed system, we first show her a list of not only
state variables, but all variables that have any effect
on any branch condition. This list includes the con-
ditional literals for each state variable. The user can
select the variables and either set certain variables to
fixed values or enter constraints on them. We then
additionally feed these constraints into the state ma-
chine extraction process – simply by using them as
additional constraints in concolic testing.
Figure 5 illustrates the state machine model of
SPD. In this scenario, we consider only pure condi-
tions. SPD has six state variables, which end up in
10 different states and 35 transitions between them. In
addition, SPD includes 19 non-state variables. In this
experiment, we have randomly selected 12 of these
non-state variables and set them to specific values or
range of values. The resulting model has the same
((Ctr == 3) && Sync)
((Ctr == 0) && Sync)
((Ctr == 1) && Sync)
((Ctr == 2) && Sync)
((Ctr != 3) && (Ctr != 2) && (Ctr != 0) && (Ctr != 1) && Sync)
((Ctr == 3) && !Sync)
((Ctr == 1) && !Sync)
((Ctr == 0) && !Sync)
((Ctr == 2) && !Sync)
((Ctr != 3) && (Ctr != 2) && (Ctr != 0) && (Ctr != 1) && !Sync)
(a) No additional constraints.
((Ctr == 1) && Sync)
((Ctr == 2) && Sync)
((Ctr == 3) && Sync)
((Ctr == 0) && Sync)
((Ctr != 3) && (Ctr != 2) && (Ctr != 0) && (Ctr != 1) && Sync)
(b) With extra user constraints.
Figure 5: The effect of additional user constraints (SPD).
number of states (10), while the number of transi-
tions has been reduced to nine
3
. The reason is that
the search space becomes much smaller than the one
without extra conditions from the user.
Table 4 shows how user constraints reduce the
model from the other eight test cases. The third col-
umn gives information about the used number of user
constraints (#C) and the share of remaining transitions
(%T) with pure and mixed conditions. The last col-
umn shows the same information – with the same user
constraints – but with only pure conditions. The used
user constraints were only applied on non state vari-
ables in this experiment. Therefore we show only the
effect on the number of transitions (%T). Constraints
on state variables are discussed in the next section.
5.3 State Variable Subset
Instead of generating a state machine model with all
state variables in a program, the user can also select a
subset of state variables that she is interested in. This
obviously leads to a state machine model with a lower
number of states. For this interaction, the user can
choose any combination of state variables, which re-
sults in a wide variety of alternatives. Therefore, we
show only one example from the large number of ex-
periments that we have done.
Take the AVG function as an example. It con-
tains six state variables. All these variables (with only
3
In the figure, we show only five states, because the
other five states are not connected by any transitions.
MODELSWARD 2018 - 6th International Conference on Model-Driven Engineering and Software Development
124

(((!ppa
ppb)
start_neg)
start_pos )
(((!ppa
!ppb)
start_neg)
start_pos )
(((!ppa
ppb)
!start_neg)
!start_pos )
(((!ppa
!ppb)
!start_neg)
!start_pos )
(((ppa
ppb)
start_neg)
start_pos )
(((ppa
ppb)
!start_neg)
!start_pos )
(((ppa
!ppb)
start_neg)
start_pos )
(((ppa
!ppb)
!start_neg)
!start_pos )
(((!ppa
ppb)
!start_neg)
start_pos )
(((ppa
ppb)
!start_neg)
start_pos )
(((!ppa
!ppb)
!start_neg)
start_pos )
(((ppa
!ppb)
!start_neg)
start_pos )
(((!ppa
ppb)
start_neg)
!start_pos )
(((ppa
ppb)
start_neg)
!start_pos )
(((!ppa
!ppb)
start_neg)
!start_pos )
(((ppa
!ppb)
start_neg)
!start_pos )
(a) All state variables.
(!ppa && !ppb)
(ppa && !ppb) (!ppa && ppb)
(ppa && ppb)
(b) Only two state variables.
Figure 6: The effect of reducing the set of state variables
(AVG).
pure conditions) generate a model with 16 states and
64 transitions. We applied the effect size heuristic to
get a hint which state variables would be most inter-
esting. Of the six state variables, the 2nd and 3rd one
(according to the effect size) turned out to be the most
interesting ones. This was done by interactive explo-
ration of different subsets, starting with the ones with
the highest rating. Selecting only these two variables
reduces the number of states to 4 and transitions to 11.
The models with all and with only these two variables
are shown in Figure 6. The result is a significant com-
plexity reduction and models that concentrate on cer-
tain aspects of the overall state.
5.4 Reduced State Variable Range
For the examples so far, state variables consider all
possible values in the program. However, our ap-
proach allows the expert to restrict values or ranges
of values for state variables.
Please recall Figure 5(a) in Section 5.2. That
model represents all possible states of Ctr and Sync
variables. The relevant values for variable Ctr are
{0, 1, 2,3}. When the user is interested in only two
values like {0, 1}, she can select these values and gets
the corresponding state machine model, which is de-
picted in Figure 7. Obviously, the state machine be-
comes much simpler. The resulting state machine is a
compact model of a quite specific aspect of the func-
tion. Similar to the previous section, we could only
((Ctr == 0) && Sync)
((Ctr == 1) && Sync)
( (Ctr == 0) && !Sync)
((Ctr == 1) && !Sync)
Figure 7: The effect of reducing state variables’ range
(SPD).
show one example due to the high number of interac-
tive options.
All interaction possibilities can be used indepen-
dently or in combination with other interactions. This
depends on the user’s goal and her previous knowl-
edge of the system (not necessarily software). For
example, when the user knows the states of interest,
she can select the right state variables and their values
at once. When the system is new to her, she can use
the different interactions in an explorative way to gain
knowledge about the software.
5.5 Experts Feedback
The main goal of our work is to extract understand-
able and useful state machine models from code. How
helpful the extracted models are can only be deter-
mined by humans who work with the code. For this
reason, we conducted interviews with three develop-
ers, whose knowledge about the behavior of our sub-
ject functions ranges from expert (function respon-
sible) to people with no idea about the subject sys-
tem. We presented different extracted state machine
models with randomly selected states and constraints
to each developer. Then we asked the developers
whether these models were helpful or interesting to
them, and what they can read out of them.
The feedback from the expert was quite interest-
ing. He thought that some transitions in the extracted
models would not exist in the code. However, when
he reviewed the code, it turned out that the transi-
tions do exist. Therefore, we can say that these mod-
els can also help in validation, verification and de-
bugging. One other interesting reaction was that he
immediately came up with ideas which states would
be interesting and which constraints he would like to
try. Feeding the relevant information and constraints
to the process does not seem to be a problem to him.
The developer who had at least an idea about the
functionality of the subject system stated that the ex-
tracted models give him valuable insights into the
function, which would be a lot of work to get from
code: “The model at this level of detail is already very
Towards Interactive Mining of Understandable State Machine Models from Embedded Software
125

helpful, since I can validate the possible states and
transitions with my expectations. The proposed ap-
proach of interactive scenarios and projections should
help to make the complexity more manageable.”
Finally, the developer without any knowledge was
asked to draw some conclusions about the models.
It was interesting that he was able to understand the
models and determine the main ideas quickly. He de-
termined which states exist, what they mean and how
they can be reached. When we compared these con-
clusions with the available information from the func-
tion authors, they were correct. For example, he was
able to come to the fact in Figure 2, that LmpOn can
never raise to a value higher than the value of TmMAX
once it becomes lower or equal to TmMAX.
In summary, the feedback shows that the extracted
models can be helpful to developers with different
levels of system knowledge. This is true even for the
expert who has worked with the function for a longer
time. These early results are quite promising and en-
courage further research and refinement of our inter-
active approach.
6 DISCUSSION
The case studies in the previous section showed that
each individual interaction with the state machine ex-
traction process has the potential to lead to less com-
plex but still useful state machines. The combina-
tion of these techniques offers even more possibili-
ties: The user can control focus and complexity of the
extracted models according to the question at hand.
Given these results, the applicability of such a process
on complex real-world systems seems to be feasible
and effective.
The first feedback from experts is also quite
promising: They seem to have good ideas about
which scenarios they want to investigate, and also
which constraints make most sense. So both techni-
cally and from user perspective, our interactive ap-
proach appears feasible. However, we are aware that
our case study is only a first step towards proving the
effectiveness of our interactive approach.
We concentrated on states and transition structure
so far and ignored transition conditions. However, the
state/transition structure alone was already considered
quite useful by our developers. Transition conditions
quickly become quite complex and unreadable. Mak-
ing transition conditions comprehensible for users is
part of our future work.
Since this state machine mining approach inten-
sively uses an SMT solver – for path enumeration,
for determining feasible states, and for finding out pre
and post states for each path –, the computational cost
is very high. For an interactive approach, short re-
sponse times are required. The interactive approach
also addresses this issue and strongly affects the re-
quired time for the model mining process: By pro-
viding additional input, limiting ranges or giving ad-
ditional constraints, the number of paths and states
is largely reduced. The number of solver calls is in
O(P ∗ S
2
) with P number of paths and S number of
states. Therefore, specially reducing the number of
states also drastically reduces the required compu-
tation time. For example, extracting the state ma-
chine model with all state variables from the function
AVG takes 16 seconds. When extracting this model
with only three variables, it takes only 2.5 seconds.
We have actually observed a decrease of computation
time when using interactions in all cases.
Our approach can meet the needs of different users
with different backgrounds about the system. For ex-
ample, domain experts or users with good knowledge
of the system can directly select the states or con-
straints of interest. Users with no idea about the sys-
tem get a ranking of all state variables according to
their effect size. We do not yet provide such informa-
tion about the relevant constraints that affect specific
states in the code, but such information could also
be quite useful for this usage scenario in the future.
In our study, we have randomly selected some con-
straints and set them to certain values, and the result
was very good. When the user had some ideas about
which constraints have the highest effect on states, the
result would be even better. Therefore, mining of rel-
evant constraints that affect specific states could be
helpful.
Our case studies and first interviews with experts
suggest that this approach can not only be helpful for
program comprehension and migration towards mod-
els, but also for validation, verification and debugging
tasks. These different usage scenarios make the ap-
proach very attractive. We will continue our work to-
wards further improvement, specially with respect to
the challenges mentioned above.
7 RELATED WORK
Most of the work on extraction of state machines
deals with API protocols, i. e., the allowed sequences
of API calls. The seminal work on this topic was done
using dynamic analysis by Ammons et al. (Ammons
et al., 2002). Similar protocol extraction based on
static analysis was first introduced by Eisenbarth et
al. (Eisenbarth et al., 2005). Little work is done to
extract state machines that describe the behavior of
MODELSWARD 2018 - 6th International Conference on Model-Driven Engineering and Software Development
126

an application. We focus on these approaches in this
section.
Bandera (Corbett et al., 2000) automatically ex-
tracts state machines from the source code of Java
programs for model checking. The generated mod-
els are in the input language of one of the used ver-
ification tools. The resulting models with thousands
of states are not a problem for this use case – but for
human comprehension, they are. In the publication of
Prywes et al. (Prywes and Rehmet, 1996), the user se-
lects the desired software components like functions
or operations in the process of generating state ma-
chines. However, the extracted state machine mod-
els from both of these works are on a very low level,
which makes them unusable for human understanding
or model based development. Prywes also concluded
that the extraction process must be human-guided.
Xie et al. (Xie et al., 2006) extract state machines
from object-oriented code based on tests. They re-
duce their size by using additional information, such
as test coverage information, observer functions, and
state slicing. The latter corresponds to our approach
of ignoring certain state variables. However, dynamic
information, which must be representative to be us-
able in this approach, is usually unavailable for real-
time systems.
Some approaches can only be used for specific
cases like in the work of Abadi et al. (Abadi and Feld-
man, 2012). They extract state charts from specific
patterns generated from code generators, so it can-
not be applied for hand-written software. Somé et
al. (Somé and Lethbridge, 2002) assume that the state
is represented by only one variable, which restricts
the implementation of this approach to systems with
obvious state machines.
Walkinshaw et al. (Walkinshaw et al., 2008) as-
sume that all states were identified manually in terms
of logical conditions on program variables. Then, the
approach uses symbolic execution to extract transi-
tions between these states. It identifies the paths in the
source code that correspond to the extracted transi-
tions. This approach also assumes that all transitions
are mapped to functions. Our approach does not have
these assumptions. In another paper (Walkinshaw and
Hall, 2016), Walkinshaw uses genetic programming
to infer computations for state machines. However,
this approach is in a very early and experimental stage
and not applicable to real-world software.
Wang et al. (Wang et al., 2012) extract high level
state machines of GUI-driven software for cell phones
and PDAs, where screens are modeled as states and
the calls of UI components as transitions. This ap-
proach is quite specific to the used GUI framework
and does not serve our purpose of extracting high
level state machines from real world software inten-
sive systems.
An approach to extract state charts from code was
proposed by Jiresal et al. (Jiresal et al., 2011). They
use static data flow analysis and heuristics based ab-
stractions to create state charts. The approach was
evaluated on a code snippet from automotive indus-
try. However, the heuristics only include some spe-
cific patterns that specifically suit the automotive case
study. Therefore, they cannot be used for systems
from other domains. Furthermore, the heuristics must
be chosen very carefully and by domain experts. Jire-
sal et al. also mentioned that better heuristics require
user interaction, but they did not implement that.
Symbolic execution is used by Kung et al. (Kung
et al., 1994) and Sen and Mall (Sen and Mall, 2016).
The techniques in these approaches were presented
in Section 2, since our interactive approach builds
upon this work. Our experiments with these ap-
proaches showed that they fail to extract understand-
able models from typical embedded software: Even
small functions can result in hundreds of states and
transitions. Our focus in this paper is to improve
these approaches towards extracting understandable
state machines from real-world software systems.
8 CONCLUSION AND FUTURE
WORK
In this paper, we have introduced several options for
supporting state machine extraction from code by user
interaction. Our case study showed that each of these
techniques can help to reduce the complexity of the
resulting state machines. It is then up to the user to
decide which combination of techniques and parame-
ters is most useful for gaining an understanding of the
underlying system.
We are aware that our case study is just a first
step towards comprehensive evaluation of our inter-
active approach. A controlled experiment about the
effectiveness of this approach with a larger number
of experts is our essential future work. In this experi-
ment, one group of developers will be asked to use our
approach and a control group will use other state-of-
the-art tools to perform a set of program understand-
ing tasks. Comparing the results from these groups
will give a well-grounded evaluation of the approach.
In addition, we plan to evaluate each scenario sepa-
rately to see the benefit of every technique. We want
to find out which scenario is most helpful given differ-
ent situations. We also want to assess the developers’
effort for applying the various selection and filtering
features. The first results are very promising.
Towards Interactive Mining of Understandable State Machine Models from Embedded Software
127

Another issue that has to be addressed in the fu-
ture is the complexity of transition conditions. We
have concentrated on states and transition structure so
far. However, transition conditions are also important
for understanding. The conditions that result from the
extraction process are usually extremely complex and
not understandable for humans. Also, reducing the
number of states obviously makes state machine mod-
els more understandable. However, the information
that was previously contained in the state invariants
will not get lost, but it will move into the transitions,
which may make those more complex. We are cur-
rently investigating approaches for reducing this com-
plexity. For example, not all information in these con-
ditions is relevant. This could lead to another interac-
tive extension.
Other opportunities for future research include ad-
ditional interactions, automated identification of ef-
fective constraints, and runtime optimization for the
SMT solver. We also want to apply similar interac-
tions to extraction of other kinds of models that can
support developers in reengineering tasks.
In summary, adding interaction to state machine
mining appears to be a promising approach towards
practically usable support for program comprehen-
sion and migration towards model-based develop-
ment.
REFERENCES
Abadi, M. and Feldman, Y. A. (2012). Automatic recovery
of statecharts from procedural code. In Int’l Conf. on
Automated Software Engineering, pages 238–241.
Ammons, G., Bodík, R., and Larus, J. R. (2002). Mining
specifications. In Proc. 29th Symp. on Principles of
Programming Languages, pages 4–16.
Broy, M., Kirstan, S., Krcmar, H., Schätz, B., and Zimmer-
mann, J. (2013). What is the benefit of a model-based
design of embedded software systems in the car indus-
try? Software Design and Development: Concepts,
Methodologies, Tools, Applications, pages 310–334.
Corbett, J. C., Dwyer, M. B., Hatcliff, J., Laubach, S.,
Pasareanu, C. S., Robby, and Zheng, H. (2000). Ban-
dera: extracting finite-state models from Java source
code. In Proc. of 22nd ICSE, pages 439–448.
Eisenbarth, T., Koschke, R., and Vogel, G. (2005). Static
object trace extraction for programs with pointers.
Journal of Systems and Software, 77(3):263–284.
Fjeldstad, R. K. and Hamlen, W. T. (1984). Application pro-
gram maintenance study: Report to our respondents.
In Proc. GUIDE 48.
Godefroid, P., Klarlund, N., and Sen, K. (2005). DART:
directed automated random testing. In Proc. of PLDI,
pages 213–223.
Hoffmann, A., Quante, J., and Woehrle, M. (2016). Ex-
perience report: White box test case generation for
automotive embedded software. In Proc. of 9th Int’l
Conf. on Software Testing, Verification and Validation
Workshops, TAIC-PART Workshop, pages 269–274.
Jiresal, R., Makkapati, H., and Naik, R. (2011). Statechart
extraction from code – an approach using static pro-
gram analysis and heuristics based abstractions. In
Proc. of 2nd India Workshop on Reverse Engineering.
King, J. C. (1976). Symbolic execution and program test-
ing. Journal of the ACM, 19(7):385–394.
Kung, D. C., Suchak, N., Gao, J. Z., Hsia, P., Toyoshima,
Y., and Chen, C. (1994). On object state testing. In
Proc. of 18th Int’l Computer Software and Applica-
tions Conference (COMPSAC), pages 222–227.
Miranda, D., Genero, M., and Piattini, M. (2005). Empirical
validation of metrics for UML statechart diagrams. In
Camp, O., Filipe, J. B. L., Hammoudi, S., and Piattini,
M., editors, Enterprise Information Systems V, pages
101–108. Springer Netherlands.
Nejmeh, B. A. (1988). NPATH: A measure of execution
path complexity and its applications. Communications
of the ACM, 31(2):188–200.
Prywes, N. and Rehmet, P. (1996). Recovery of software
design, state-machines and specifications from source
code. In Proc. of 2nd Int’l Conf. on Engineering of
Complex Computer Systems, pages 279–288.
Quante, J. (2016). A program interpreter for arbitrary ab-
stractions. 16th Int’l Working Conference on Source
Code Analysis and Manipulation, pages 91–96.
Roehm, T., Tiarks, R., Koschke, R., and Maalej, W. (2012).
How do professional developers comprehend soft-
ware? In Proc. of 34th ICSE, pages 255–265.
Sen, T. and Mall, R. (2016). Extracting finite state repre-
sentation of Java programs. Software & Systems Mod-
eling, 15(2):497–511.
Somé, S. S. and Lethbridge, T. (2002). Enhancing program
comprehension with recovered state models. In 10th
Int’l Workshop on Program Comprehension (IWPC),
pages 85–93.
Walkinshaw, N., Bogdanov, K., Ali, S., and Holcombe, M.
(2008). Automated discovery of state transitions and
their functions in source code. Softw. Test. Verif. Re-
liab., 18(2):99–121.
Walkinshaw, N. and Hall, M. (2016). Inferring computa-
tional state machine models from program executions.
In Proc. of Int’l Conf. on Software Maintenance and
Evolution (ICSME), pages 122–132.
Wang, S., Dwarakanathan, S., Sokolsky, O., and Lee, I.
(2012). High-level model extraction via symbolic exe-
cution. Technical report, Univ. Pennsylvania, Dept. of
Computer and Information Science. MS-CIS-12-04.
Weiser, M. (1981). Program slicing. In Proc. of 5th Int’l
Conf. on Software Engineering, pages 439–449.
Xie, T., Martin, E., and Yuan, H. (2006). Automatic ex-
traction of abstract-object-state machines from unit-
test executions. In Proc. 28th ICSE, pages 835–838.
MODELSWARD 2018 - 6th International Conference on Model-Driven Engineering and Software Development
128
