
Hijacked Smart Devices
Methodical Foundations for Autonomous Theft Awareness based on Activity
Recognition and Novelty Detection
Martin J
¨
anicke
1
, Viktor Schmidt
1
, Bernhard Sick
1
, Sven Tomforde
1
and Paul Lukowicz
2
1
Intelligent Embedded Systems Group, University of Kassel, Wilhelmsh
¨
oher Allee 73, 34121 Kassel, Germany
2
German Research Center for Artificial Intelligence, Trippstadter Straße 122, 67663 Kaiserslautern, Germany
Keywords:
Smart Devices, Gaussian Mixture Model, Organic Computing, Self-Awareness, Probabilistic Theft Detection.
Abstract:
Personal devices such as smart phones are increasingly utilised in everyday life. Frequently, Activity Recogni-
tion is performed on these devices to estimate the current user status and trigger automated actions according
to the user’s needs. In this article, we focus on improving the self-awareness of such systems in terms of
detecting theft: We equip devices with the capabilities to model their own user and to, e.g., alarm the legal
user if an unexpected other person is carrying the device. We gathered 24hours of data in a case study with
14 persons using a Nokia N97 and trained an activity recognition system. Based on it, we developed and
investigated an autonomous novelty detection system that continuously checks if the observed user behav-
ior corresponds to the initial model, and that gives an alarm if not. Our evaluations show that the presented
method is highly successful with a successful theft detection rate of over 85% for the trained set of persons.
Comparison experiments with state of the art techniques support the strong practicality of our approach.
1 INTRODUCTION
More and more smart devices are available nowadays,
interconnected and always trying to improve our daily
lives. Their automated support ranges from reminders
for meetings via navigational assistance to analyzing
and improving our running style. Their ubiquitous
assistance is completely pervading our personal en-
vironments. It is also common that users have more
than one smart device, as old ones are rarely dis-
posed or sold. Unfortunatly, the monetary value of
such devices is also very high, so that thefts are quite
common, especially in urban areas. Even though it
is possible to track a stolen device afterwards, an
active involvment of the user in particular is neces-
sary – and often happens when it is already too late.
The major challenge with such approaches is that
theft and the discovery of the theft might be hours
apart. So instead, we envision an approach, where
the device itself recognizes whether it was stolen or
not, autonomously, based on internal sensors. Such
self-aware systems can then trigger counteractions or
alarms timely, even before the legitimate user misses
the device. In terms of developing such self-* prop-
erties, the proposed approach augments the concept
of initiatives such as Autonomic Computing (Kephart
and Chess, 2003) or Organic Computing (Tomforde
et al., 2017). In particular, we aim at providing capa-
bilities to autonomously observe the user behaviour
and estimate whether the device itself is still carried
by the owner or not. In case a severe deviation of ex-
pected behaviour is noticed, the owner can be notified
immediately on a backup-channel or sensible infor-
mation can be secured even stronger.
Our proposal uses methods from the field of Ac-
tivity Recognition (AR) to model the characteristics
of users activities. Methods from the field of Nov-
elty Detection (ND) are then used to detect, whether
a carrier’s activities still match that model or deviate
from the expected behavior. So far, such a combina-
tion of approaches from these different research direc-
tions does not exist. We see our approach as an impor-
tant part towards creating self-awareness in technical
systems, as the detection of environmental changes is
integral to such a task.
In this article, we use a probabilistic, genera-
tive approach based on Gaussian Mixture Models
(GMMs) to classify daily activities from smartphone
data. The evaluation of our method involves a case
study with activity data from 14 users and 5 sessions
of approx. 20 minutes each, so the overall database
comprises of roughly 24h of user data. Even though
Jänicke, M., Schmidt, V., Sick, B., Tomforde, S. and Lukowicz, P.
Hijacked Smart Devices - Methodical Foundations for Autonomous Theft Awareness based on Activity Recognition and Novelty Detection.
DOI: 10.5220/0006594901310142
In Proceedings of the 10th International Conference on Agents and Artificial Intelligence (ICAART 2018) - Volume 2, pages 131-142
ISBN: 978-989-758-275-2
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
131
Theft detection
Activity
Recognition
Novelty
Detection
High
Certainty?
Deviation?
Yes
Alarm
Generation
Yes
No
No
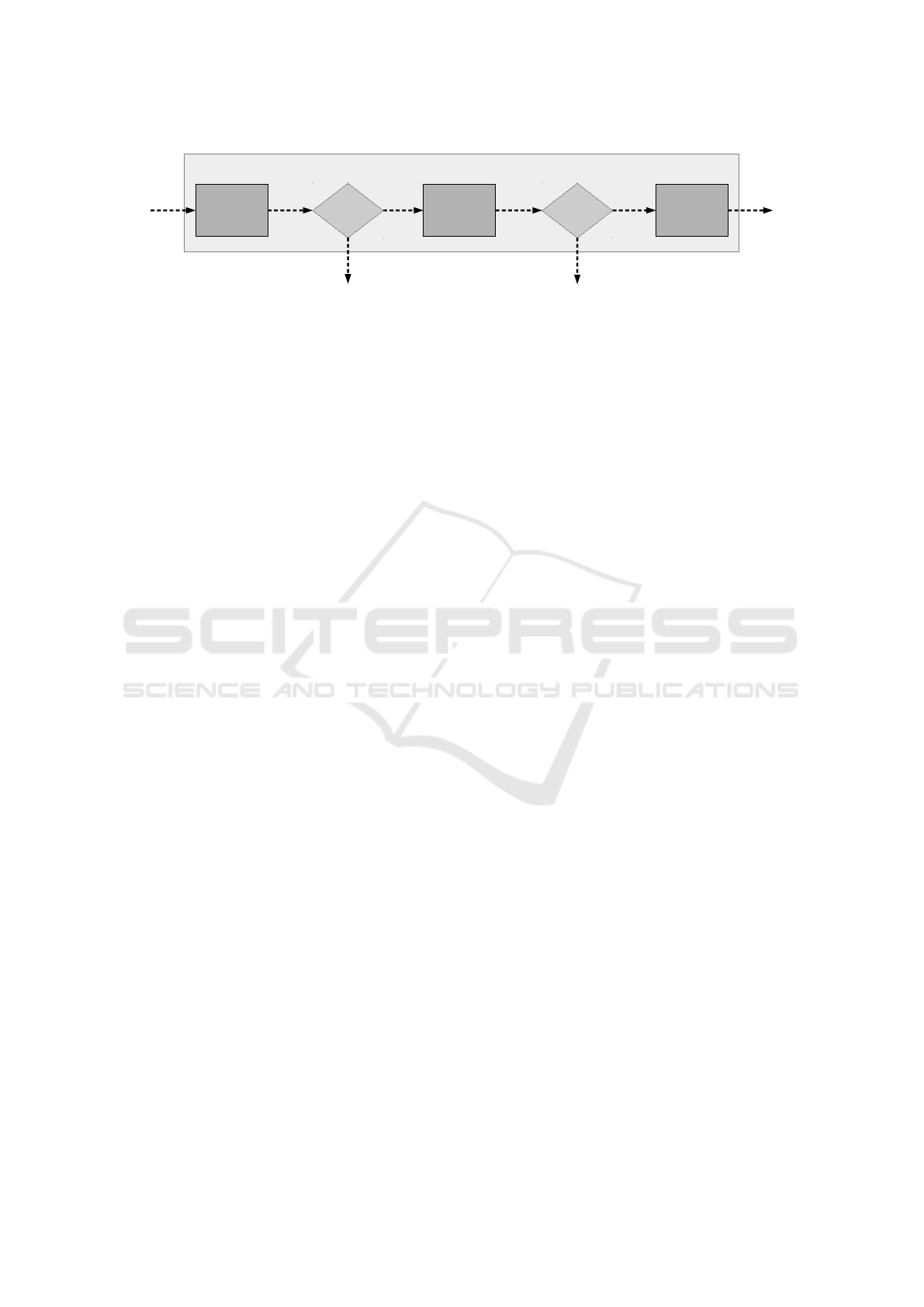
Figure 1: System parts involved in a theft detection that can run on smart devices. With input being processed by the AR
component (see Section 3 for details), output with high certainty is forwarded to a ND component (see Section 4 for details).
If a deviation to a pre-learned model is measured, an alarm can be generated and further actions taken.
the data uses very basic daily activities, our approach
is not limited to them. The used GMM captures struc-
ture in arbitrary data, so it is not confined to a pre-
defined set of activities. Based on the trained mod-
els, the detection of novel data is investigated and dis-
cussed in depth. By detecting novel / previously un-
known data, it is possible to realize an autonomous
theft detection that works quite well, even with data
from very simple activities. Figure 1 gives an idea,
how such a system can be designed.
The key contributions of our work are 1. the in-
troduction of methods to realize an unobtrusive se-
curity feature for body-worn smart devices and 2. to
realize a theft detection with a very simple and com-
mon sensor, along with easy to compute features of
very basic, daily activities.
The remainder of this article is structured as fol-
lows: In Section 2 our approach is put into perspective
with the work from other groups in the area of ND. In
Section 3, the solution for the AR task based on ac-
celeration data is presented. Based on optimized AR-
models, our approach towards the problem of novelty
detection is addressed in Section 4. Afterwards, in
Section 5, a realization of a smart device with theft
detection capabilities is sketched. This work is then
concluded by a summary in Section 6, discussing the
evaluations and giving an outlook on further work.
2 RELATED WORK
Our related work briefly touches the field of Activ-
ity Recognition (AR), but mostly focuses on Novelty
Detection (ND). The term AR was first publicly dis-
cussed nearly 20 years ago by Abowd et al. (Abowd
et al., 1999) and has since then gained a lot of pop-
ularity among researchers. The greatest challenge
of inferring a user’s activity from body-worn devices
was pursued since day one (c.f., e.g., (Clarkson et al.,
2000; Gellersen et al., 2002)). A first step moved re-
search from visual data (i.e. probands were filmed) to
movement data from body worn sensors. Those sen-
sors were packed in sensor-nodes and strapped to the
body, on arms, torso, thighs, etc. Later, smartphones
became more popular in research, due to the sensors
of interest being integrated and their increasing com-
puting power. Those two properties led to Machine
Learning (ML)-techniques being implemented on the
devices, so that the recognition could happen effort-
lessly.
Addressing preparations for ML algorithms, Lau
et al. (Lau et al., 2010) focused on various param-
eters that have an influence on feature computation.
They investigated different sensor sampling frequen-
cies (8, 16 and 32Hz) along with different sliding win-
dow sizes (0.5s, 1s, 2s, 4s) and different sliding win-
dow overlaps (25%, 50%, 75%), with features being
calculated from each sliding window. The results re-
vealed that a sampling frequency of 32Hz, a sliding
window size of 4 seconds (128 measurements) and an
overlap of 75% achieved the most accurate results for
recognizing daily activities. Besides that, similar ac-
tivities (like Walking, Ascending stairs and Descend-
ing stairs) were often mixed up by the classifiers un-
der investigation. The work of Franke et al. was also
focused on technical details and preprocessing in rec-
ognizing daily activities (Franke et al., 2009). They
put a lot of effort into recognizing user activities based
on sound samples of a smartphones microphone, that
itself was carried in different pockets. However, they
did not investigate advanced ML-techniques in depth.
The question of how to model recorded data is
following: Which modelling technique(s) should be
used to represent the data? In (Chen et al., 2012)
the authors give an overview of different methods, as
well as approaches based on prior problem knowledge
(so called “Knowledge driven”). An explicit distinc-
tion between discriminative approaches (e.g. Support
Vector Machines (SVMs)) and generative approaches
(e.g. Hidden Markov Models) is made and discussed
in depth. Despite their discussion of different ap-
proaches that were tried for AR scenarios, the authors
neglect the heavy influence of chosen training algo-
rithms. Our experience showed, that a paradigm can
perform somewhere between excellent and very bad,
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
132

only depending on the training algorithm; sometimes
even only the initialization of the very same train-
ing algorithm. The authors also mentioned, that they
did not discuss inconsistencies and missing values in
training data, but both effects commonly appear in
real life datasets. Even though classifiers of various
kinds are investigated, in practical applications, most
common solutions prefer discriminative techniques,
completely neglecting the information that can be ex-
tracted when using generative models (e.g. structural
information of training data). While often superior
in terms of classification performance, no further in-
formation other than the class prediction can be ex-
tracted from discriminative models. Contrarily, gen-
erative models approximate the structure of the data
and thus allow the detection of datapoints that do not
fit that structure: outliers. With this huge advantage,
we decided to use a generative representation over a
discriminative one.
Outlier detection or Novelty Detection (ND) fo-
cuses on the detection of data, that does not fit a spe-
cific data-model. With a trained model at hand, ob-
served data is expected to fit that model, because an
implicit assumption usually is, that training data is
representative and thus the model trained on it is a
good representation of expected data to come. How-
ever, over time, or due to changes in the observed
environment, the distribution of observed data may
change and that assumption is violated. Suppose an
input space with several clusters and, at some point
in time, a new cluster arising, which is not covered
by the data-model. Those datapoints can be seen
as outliers with respect to the model or, as novel,
if never before observations were made in that re-
gion. A first categorization of ND approaches was
done by Markou et al. and depicted two groups of
detection mechanisms. One group included statisti-
cal methods, relying on trained models (Markou and
Singh, 2003a). Datapoints were depicted as novel,
if they differed too much from that model. Ac-
cording to the authors, statistical approaches involved
non-parametric models (e.g., k nearest neighbor ap-
proaches or density estimators), as well as parametric
models, for which certain assumptions on the data dis-
tribution are made. The second group was associated
with neural network based approaches (Markou and
Singh, 2003b), however, should not be discussed fur-
ther, as our method clearly is a group one approach.
The authors put a common technique in the second
group, namely the detection of outliers via One-class
SVMs, but to our understanding the approach is not
neural network based. The approach was first sug-
gested by (Sch
¨
olkopf et al., 1999) and later applied to
the problem of object recognition based on image data
by (Tax and Duin, 2002). The authors used an artifi-
cial dataset with artificially added outliers, as well as
images from handwritten digits with artificially added
outliers. Even though a certain feasibility was shown,
the authors had no real life dataset to proof their con-
cept. Apart from that, the approach was accepted
for outlier detection among researchers and later ap-
plied to, e.g., intrusion detection scenarios ((Li et al.,
2003)) or the detection of abnormal nodes in wire-
less sensor networks ((Zhang et al., 2009)). In both
cases, training data representing a normal situation
were used to train One-class SVMs and the goal was
to detect deviations from it.
The novelty detection mechanism we propose is
based on a Gaussian Mixture Model (GMM) and uses
a state variable to define the current status of data fit-
ting the model. The parameters associated with the
measure then enable users to influence the tradeoff be-
tween detection-accuracy and time-to-detection. The
technique was introduced and first used by Fisch et al.
in (Fisch et al., 2009).
Related Work in a Nutshell: As noted at the begin-
ning of this section, Activity Recognition based on
body worn sensors, like smartphones, smart watches
or other wearables, is the current way to go in re-
search. Even though preprocessing steps have heavily
been researched, detection algorithms mostly ignore
usable information available in the dataset. So, with
respect to information gained from datasets, there is
room for improvement. Secondly, the field of novelty
detection has a broad field of techniques at hand, how-
ever, only few were investigated on real life datasets.
To address the first point, we see big potential in
the use of probabilistic, generative approaches and
thus investigated the usage of classifiers based on
Gaussian Mixture Models and present results in Sec-
tion 3. Building on top of that, we are first in the field
of theft detection based on such models and discuss
our proposal in depth in Section 4.
3 ACTIVITY RECOGNITION
In Section 1 the overall approach with all neces-
sary steps for a theft detection (Activity Recognition
(AR), followed by Novelty Detection (ND)) were in-
troduced (c.f. Figure 1). In the following section, all
experiments that were performed to reach a most ac-
curate activity prediction are discussed.
The used dataset was recorded at our institute and
comprises of the data of 14 different users. Each user
followed a script that described which activity should
be performed how long and in which order. Each run
of the script was repeated five times, with a maxi-
Hijacked Smart Devices - Methodical Foundations for Autonomous Theft Awareness based on Activity Recognition and Novelty Detection
133

mum of two sessions on the same day, to reduce self-
similarities in the data. The activites under investi-
gation were Walking, Ascending Stairs, Descending
Stairs, Standing and Sitting. Please note that, while
these activities are very basic, our techniques are not
confined to them and, as will be explained, GMM are
rather powerful modelling approaches that can cap-
ture all kinds of data. The five basic activities are
chosen exemplatory, for comparison with other stud-
ies (cf., e.g., (Kwapisz et al., 2011; Lau and David,
2010)). All data were three-dimensional acceleration
data recorded on Nokia N97 with a highest possi-
ble frequency of 182Hz. Overall 70 sessions with
an overall length of approximately 1400min were
recorded and labeled.
Preprocessing steps included a resampling to
32Hz (cf. Section 2), a linear interpolation of miss-
ing values, a feature extraction and a standardization.
On our path to train an optimal classifier, we quanti-
fied the influence of 1. an additional sensor dimen-
sion, 2. different features, 3. optimized parameters
and 4. aggregated classifier outputs.
The first step towards improving AR performance
was the addition of the magnitude as additional value.
The values of this new “dimension” were calculated
as the length of the acceleration vector by using the
Euclidean distance:
mag =
p
x
2
+ y
2
+ z
2
. (1)
Afterwards, for every dimension the following four
features were extracted:
• mean
µ =
1
N
N
∑
n=1
x
n
, (2)
• standard deviation
σ =
s
1
N − 1
N
∑
n=1
(x
n
− µ)
2
, (3)
• energy of Fourier transformation
energy =
N
∑
n=1
fft
n
, (4)
• information entropy of Fourier transformation
entropy =
−1
log(N)
N
∑
n=1
fft
n
· log(fft
n
), (5)
with fft
n
being the magnitude of the n-th Fourier
coefficient.
All features are extracted by a sliding window ap-
proach (which is quite common in AR, cf., e.g., (Lau
et al., 2010; Sun et al., 2010)) with a size of 128 val-
ues and an offset of 32 (followingly 75% overlap);
aggregating 4 seconds of data, for one classification
prediction each second.
The generative approach we used as a classifier is
also used as a basis for the novelty detection mecha-
nism later (see Section 4), as the detailed modeling of
data enables a well working outlier detection. Gener-
ative approaches model the given data by means of a
density model; so that after training, data generated
by this model would underly the same distribution
as the original training data. We focus on a Clas-
sifier based on Gaussian Mixture Models (CMM),
trained by a realization of Variational Bayesian Infer-
ence (VI), a method proposed in (Bishop, 2006a).
The second optimization step was a better compu-
tation of features to allow a better discrimination be-
tween Ascending stairs, Descending stairs and Walk-
ing. As it turned out, the most vivid combination was
the replacement of the Fourier coefficient based fea-
tures by a high-pass-filtered version, where mean and
standard deviation of that coefficients are used. The
great performance of this replacements is no coin-
cidence, but was previously observed by others (cf.
(Junker et al., 2008)), stating that “simple” features
(mean and standard deviation) perform very well most
of the time.
The next step was the optimization of classifier pa-
rameters. A popular method from the domain of ML
is a parameter grid search, so that an optimal configu-
ration for the classifier can be used in a practical appli-
cation. However, a detailed grid search is exhaustive,
since it tests every possible parameter combination.
It also comes at very high computational costs, with
respect to time and resources. We used four out of
five sessions for the parameter search, while keeping
one session to use as test data for the evaluation. The
parameter optimization was also carried out in a five-
fold cross-validation, with four parts being used for
training and the fifth part being used for parameter-
validation. This leads us to have 70 (14 users, 5 ses-
sions each) different models, each one with the need
for a grid search on three of the four VI-parameters
(cf. (Bishop, 2006a)). To find optimized parameters
for CMM we use an initialization heuristic with initial
centers being placed farthest apart from each other as
described by Bishop (Bishop, 2006b), with an initial
number of 50 components. Convergence criterion for
the training algorithm was a Likelihood function, with
a convergence threshold of 0.01 between two consec-
utive steps. The parameter α was varied between 0.1
– 0.5, β between 0.1 – 1.0 and w between 0.01 – 1.0
(names of aprameters as given by (Bishop, 2006b)).
As known from comparable scenarios, these regions
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
134
are most interesting. Every possible combination of
the points is evaluated by a five-fold cross-validation
(overall 17920 classifier trainings), with the classifi-
cation error of the validation data being the compar-
ison measure and the lowest error denoting the best
fitting model.
As a last step to improve the classification per-
formance, a short term memory is added right after
the classifier. This is motivated by the fact that users
are unlikely to change their current activity for just
a short period of time. E.g. with our preprocessing,
every second a class prediction is made; but Walking,
Sitting, Walking is a highly implausible chain of ac-
tivities. The size of this memory, which was realized
as a FIFO buffer, had varying sizes between 2 and 10,
storing the last activity predictions. The classifier as
we used it before, is not affected in any way. The
final system prediction is determined by a simple ma-
jority vote on the buffer. If there is no majority, the
last majority decided value will be taken and if the
buffer is not filled yet, the classifier output will be as
usual. Please note that whith each real activity transi-
tion, there is a delay in system output. However, num-
bers clearly indicate that those few misclassifications
(which only occur on activity transitions) compensate
the greater number of (otherwise misclassified) “out-
liers” during normal operation.
Buffer sizes 2, 3 and 5 are favorable, depending
on whether recognition speed is important to an ap-
plication or not. In our case, a buffer size of 5 implies
a prediction delay of 3 seconds between activities.
Taking all optimizations into accout on a per-
user-basis, the overall improvement based on five-
fold cross-validations, leads to an average classifica-
tion error of 6.99% ± 2.79%, which is an error re-
duction of 7.63%. It is also worth mentioning, that
wisely chosen features lead to the greatest improve-
ment (3.55%), whereas a parameter optimization of
the training algorithm reveals a surprisingly low im-
provement (0.17%). This results are summarized in
Table 1.
Table 1: Classification errors of test data with one additional
optimization added in each step, showing one step per line.
The last line represents the setting with all optimizations
active. Mean ± Standard Deviation are evaluated by five-
fold cross-validations and aggregated across all 14 users.
The best results are shaded gray.
Dimensions CMM E
Te
[%]
baseline 14.62 ± 5.00
+ additional dimension 12.52 ± 5.06
+ better features 8.97 ± 3.20
+ grid search 8.80 ± 3.26
+ short term memory 6.99 ± 2.79
4 NOVELTY DETECTION
The Novelty Detection mechanism of choice is de-
scribed in this section, along with the performed pa-
rameter optimization and experiments. The measure
is based on CMMs and was first proposed by Fisch et
al. in (Fisch et al., 2009). It is bound to [0.0, 1.0] and
based on a penalty/rewards scheme, i.e., with each
new observation a variable is either increased (data-
point fits the model) or decreased (datapoint seems
to be an outlier). The term novelty stems from the
first applications of this measure, where data (that is
unknown to a generative model, cf. Section 2) rep-
resented novel processes in the input space. Follow-
ingly, a “dissatisfaction” of the measure with the cur-
rent model was the result: There were more penal-
ties than rewards for the observations and thus the
measure fell, eventually below a predefined thresh-
old. Please note that the detection mechanism can be
applied to GMMs of any kind. Here, the pretrained
models from Section 3, that are based on basic daily
activities, are used for all evaluations.
4.1 Parameter Optimization
The novelty detection mechanism has two parame-
ters (α, η) and once the measure falls below a given
threshold, it indicates a difference between observa-
tions and data-model. The parameter α describes the
fraction of datapoints that should be seen as “normal”
with respect to the model, with 1 - α denoting the
fraction of outliers that is acceptable. Values from
the interval [0.75, 0.95] were chosen in 0.05 steps.
Other values were not investigated, as data with more
than 25% outliers (α = 0.75) or less than 5% outliers
(α = 0.95) might appear in data – but to our under-
standing, would only be so extreme due to bad mod-
els. The parameter η describes a kind of sensitivity,
i.e., the magnitude of the measure’s punishment and
reward factors. As in comparable datasets, tested val-
ues were chosen from the interval [0.001, 0.1] in 100
equidistant steps. Finally, the threshold γ allows for
statements about data-to-model fitment: If the mea-
sure stays above that threshold for every datapoint
(more reward than punishment), the current data and
the training data seem to underly the same distribu-
tion. Hence, the model covers the data well and the
novelty measure stays up. In contrast, data that un-
derly a different distribution than the training data,
will reduce the novelty value until it falls below γ. It is
obvious that η and γ are connected: a lower threshold
can be reached within the same number of datapoints
as a higher one, if the sensitivity is increased. Further-
more, the adaption of one parameter can be compen-
Hijacked Smart Devices - Methodical Foundations for Autonomous Theft Awareness based on Activity Recognition and Novelty Detection
135

sated by changing the value of the other parameter,
resulting in the same effects. Due to this, γ was fixed
before η was adjusted independently for each user.
In our experiments, the goal is to find an η for
each investigated α, so that no novelty is detected for
the own user, but for all other users, as fast as possi-
ble. For γ, 8 equidistant values from the interval [0.0,
0.7] were investigated. If more than one η fulfilling
the condition during validation was found, it was av-
eraged for final testing. For a detailed description of
the parameters please refer to (Fisch et al., 2009). For
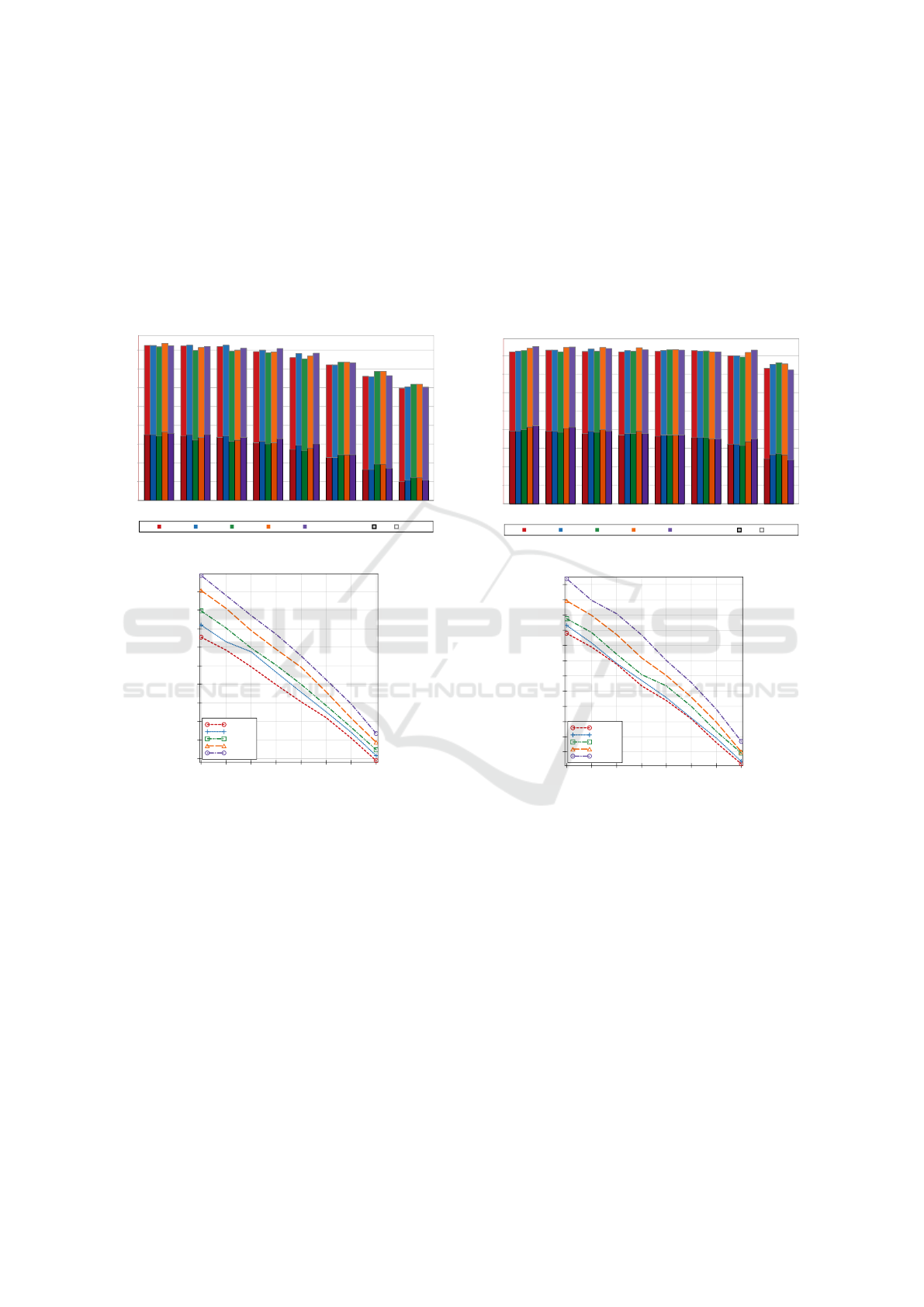
all evaluation scenarios two graphs were generated.
The figures for success rates show the reached val-
ues, illustrated by a bar for each α and γ combination
for a fitting η, which was determined by the respec-
tive method. The success rate is composed of user
data (bottom), where no novelty should be detected
and data from other users (top), for which the mea-
sure should fall below γ for success.
Because there is more data from other users than
from the actual user (Ratio 13 to 1), the results are
weighted accordingly to have a maximum af 50%
each, so that the overall maximum is 100%. The av-
erage time needed for a novelty detection is displayed
by a line chart. This time is only determined by the
number of successfully detected novelties. Displayed
values of both graphs are averaged results of five-fold
cross-validations from each user.
When looking at working combinations of α and
γ, successful detections mean that a fitting η was
found during our experiments.
One way to configure the η parameter for each
user, would be the usage of the training data to op-
timize the parameters. In other words, the optimiza-
tion takes place with data, which “is known” to the
models. However, a major concern for this scenario is
overfitting: If the data was used to create the model,
how representative would an optimization on its basis
be?
As we wanted to use unknown, but user-fitting
data to find a specific η, additional validation data was
necessary. To address this issue, models were trained
with only three out of five user-sessions, with one of
the remaining sessions being a parameter validation
set and the other one being the parameter test set (V-
VAL).
The model parameters themselves were optimized
via grid search on α and η.
The optimization was aiming at an η, that made
the novelty measure sensitive enough to reach a value
in the interval [0.74, 0.76] for the correct user at least
once, however, the measure was not allowed to fall
below that interval. This specific interval can also be
interpreted as follows: The target was to adjust the
α = 0.75 α = 0.80 α = 0.85 α = 0.90 α = 0.95 user thief
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
γ
0
10
20
30
40
50
60
70
80
Success Rate in %
(a)
250
275
300
325
350
375
400
425
450
475
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
α = 0.75
α = 0.80
α = 0.85
α = 0.90
α = 0.95
γ
Avg. Time in Sec.
(b)
Figure 2: Success rates (a) and average times (b) of a nov-
elty detection with various configurations of the novelty
measure (V-VAL). For further description please refer to
Section 4.1.
sensitivity, so that a 25% deviance on the current
user’s validation data was allowed with a tolerance
of 1% (0.75 ± 0.01). With that condition satis-
fied, all other test-users should be detected by the so
parametrized measure.
Figure 2 visualizes the evaluation: The higher the
demanded recognition threshold γ, the lower is the
rate of successfully detected novelties. Everything
considered, this means that for a predefined thresh-
old (γ) the chance of finding a suitable sensitivity (η)
decreases when the fraction of tolerated outliers is re-
duced (α is risen).
It can also be seen that for different γ the success
rate hardly differs; basically proving the dependence
between γ and η: for nearly every threshold, a sen-
sitivity can be found. A first significant drop of the
success rate can be recognized for a γ of 0.60. The
best average detection time was reached for α-values
of 0.75 and 0.80.
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
136
4.2 Ensemble-based Approach
As three out of four training datasets are used to train
the model on which novelty parameters are validated
with the fourth session, four different models can also
be stored and used as an ensemble for novelty de-
tection. With several models, a number of ensemble
members have to agree on the type of a datapoint (out-
lier or model-compatible), before the dataset under in-
vestigation can be identified as fraud.
α = 0.75 α = 0.80 α = 0.85 α = 0.90 α = 0.95 user thief
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
γ
0
10
20
30
40
50
60
70
80
Success Rate in %
(a)
75
100
125
150
175
200
225
250
275
300
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
α = 0.75
α = 0.80
α = 0.85
α = 0.90
α = 0.95
γ
Avg. Time in Sec.
(b)
Figure 3: Success rate (a) and average detection time (b) of
novelty detections based on ENS with a majority of 1 out
of 4 members (ENS
1
). For further details please refer to
Section 4.2.
Four novelty detections were run in parallel for
one test session. Deviating data is detected, as soon as
a predefined majority of the ensemble detects a nov-
elty (ENS).
In Figures 3 to 6 the evaluation results are visual-
ized. A majority of one (Figures 3a and 3b) results in
a rather sensitive ensemble, that seems to be overcau-
tious, the higher the detection threshold is selected.
This means that novelty is easily detected, but also
that the rightious user is more often falsely detected
as non fitting the data. This can be seen in the suc-
cess rate for data from other users, which is nearly at
the maximum of 50% for each α. However, in turn
the success rate on legitimate user data is way below
50%; with γ = 0.70 even around 10% for each α. A
γ of 0.20 seems to be a practical value, because the
success rate on the user’s data starts to drop from 0.30
onwards. With this low γ, an α of 0.80 reveals the best
success rate and the second best detection time.
For each threshold, a majority of two increases the
detection performance (Figures 4a and 4b). A γ of
0.60 and an α of 0.95 are a good choice here, as the
success rate is high and the detection time fast.
α = 0.75 α = 0.80 α = 0.85 α = 0.90 α = 0.95 user thief
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
γ
0
10
20
30
40
50
60
70
80
Success Rate in %
(a)
175
200
225
250
275
300
325
350
375
400
425
450
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
α = 0.75
α = 0.80
α = 0.85
α = 0.90
α = 0.95
γ
Avg. Time in Sec.
(b)
Figure 4: Success rate (c) and average detection time (d) of
novelty detections based on ENS with a majority of 2 out
of 4 members (ENS
2
).
For a majority of three (Figures 5a and 5b), the
success rate for novelty detection is slightly rising
with an increased γ, while the false alarm rate also
increases (user success rate decreases). In order to
keep the detection time low, a γ of 0.7 and an α of
0.75 seem to be a good choice.
The majority of four is yet another special case
(Figures 6a and 6b). The insensitivity against deviat-
ing data is rather high and takes comparatively long,
even with high thresholds (e.g. γ = 0.60 or 0.70). Out-
put from this model can be interpreted as very reli-
able, however, successful detections take a very long
time. A γ of 0.70 is the only meaningful value here.
Hijacked Smart Devices - Methodical Foundations for Autonomous Theft Awareness based on Activity Recognition and Novelty Detection
137

α = 0.75 α = 0.80 α = 0.85 α = 0.90 α = 0.95 user thief
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
γ
0
10
20
30
40
50
60
70
80
Success Rate in %
(a)
300
325
350
375
400
425
450
475
500
525
550
575
600
625
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
α = 0.75
α = 0.80
α = 0.85
α = 0.90
α = 0.95
γ
Avg. Time in Sec.
(b)
Figure 5: Success rate (e) and average detection time (f) of
novelty detections based on ENS with a majority of 3 out
of 4 members (ENS
3
).
Due to the lowest detection time with such an en-
semble, an α of 0.75 would be an appropriate choice.
4.3 One-class SVM
For a comparison we decided to focus on One-Class
SVMs, which are commonly used for outlier/anomaly
detection ((Fernndez-Francos et al., 2013; Amer
et al., 2013; Guerbai et al., 2015)). Positive data
(in our case data from the actual user) is often used
to train a discriminative function, which then outputs
whether data belongs to the positive class (“+”) or not
(“-”). For that purpose, ν-SVMs with a Radial Basis
Function (RBF)-kernel (γ
RBF
= 0.10) were trained in
the same manner as before, i.e., three out of five ses-
sions were used for training, a parameter-optimization
was done on a fourth session (validation session) and
the evaluation was done with the remaining session
(test session). For the optimization step, the overall
number of positive outputs from the validation set was
used: The more positive predictions a certain parame-
ter value caused, the better the trained SVM (and thus
the current ν) was considered.
α = 0.75 α = 0.80 α = 0.85 α = 0.90 α = 0.95 user thief
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
γ
0
10
20
30
40
50
60
70
80
Success Rate in %
(a)
625
650
675
700
725
750
775
800
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
α = 0.75
α = 0.80
α = 0.85
α = 0.90
α = 0.95
γ
Avg. Time in Sec.
(b)
Figure 6: Success rate (g) and average detection time (h) of
novelty detections based on ENS with a majority of 4 out
of 4 members (ENS
4
).
As ν can be interpreted as a maximum accepted
fraction of datapoints outside the region of interest,
it is comparable to the parameter α from our novelty
measure and thus, values {.05, .10, .15, .20, .25, .30
} were investigated. Cross-validated over all users, ν
= 0.05 turned out to be the best available parameter,
i.e., the maximum number of accepted datapoints was
reached for that parameter.
The next challenge on ν-SVMs is the creation of a
mechanism for novelty detection, so that outliers are
recognized with a specific certainty: Our method of
choice was the short term memory technique as in-
troduced for the AR-task in Section 3. The neces-
sary majority for outliers within a window was fixed
to being greater than 50%. For each user, a specific
window length was found. Starting with a window
length of 3, the size was incremented up to the point,
where all other users where recognized as being dif-
ferent (had more outliers in the sliding window than
accepted datapoints), which corresponds to the fastest
possible reaction time in terms of novelty detection.
Given an optimal sliding window length, the follow-
ing criteria had to be met for a working configuration:
1. the dataset of the current user has to cause less than
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
138

50% outlier predictions, while 2. for each other user,
the fraction of outlier predictions was greater than
50%.
Still, as a result, only 328 out of 930 (14 users
with 13 datasets from other users and 5 sessions of
each other user being tested) novelties were actually
detected. Results are summarized in Table 2.
Table 2: Comparison of the success rates and average detec-
tion times of all users using parameter optimized ν-SVMs.
Average values in the shaded line are given in the form mean
± standard deviation.
User
Success Rate [%] Avg.
user
non-
total
Time
owner [s]
1 80.00 13.85 46.93 1182
2 100.00 38.46 69.23 1262
3 80.00 60.00 70.00 1117
4 80.00 27.69 53.85 1114
5 60.00 27.69 43.85 1198
6 100.00 33.85 66.93 1075
7 80.00 80.00 80.00 858
8 80.00 33.85 56.93 1018
9 80.00 40.00 60.00 1109
10 80.00 27.69 53.85 901
11 100.00 16.92 58.46 1322
12 100.00 4.62 52.31 1032
13 80.00 3.08 41.54 1212
14 80.00 96.92 88.46 442
84.29 36.04 60.17 1060
∅
∅
∅
± 11.58 ± 26.87 ± 13.48 ± 204
From the table can clearly be seen that the accep-
tance of user data by the trained ν-SVM is rather high,
however, the detection rate of non-owner-data is very
bad: Out of 65 possible detections (13 other users,
5 sessions each) at most 62 (in the case of user 14th
SVM) and at least 2 (in the case of user 13th SVM)
were detected as not-fitting. Furthermore, the average
detection time is quite high. Overall can be stated,
that a One-Class SVM seems unsuitable for novelty
detection tasks in AR-scenarios. This statement is
supported by the fact, that the average detection ac-
curacies have a very high standard deviation.
4.4 Discussion
In Table 3 a comparison of our new techniques along
the commonly accepted One-class SVM approach is
visualized.
Parameters α and η for our novelty detection ap-
proach were optimized by means of a grid search. In
the SVM-case, ν was chosen by detection accuracy,
with the radius of the kernel functions γ
RBF
fixed to
0.10 and the majority of the necessary sliding window
content fixed at 50%. Whereas the SVM struggles
most with an overall working detection, our approach
is working and can even be parametrized to the user’s
needs: The tradeoff between accuracy and detection
speed is the biggest issue and should be handled with
care, depending on, e.g., whether false alarms are ac-
ceptable or not. In all investigated scenarios, the SVM
delivers a mostly bad performance for novelty detec-
tion, while offering a rather acceptable performance
for identifying the correct user. The influence of novel
data however, leads to a seemingly random behaviour.
Furthermore, the SVM-based approach is completely
inappropriate in terms of fast detections.
When false alarms (the actual users data is de-
tected as foreign) should be avoided at all costs, an
ensemble with a majority of 4 out of 4 (ENS
4
) seems
to be the method of choice. It has the highest suc-
cess rate (85.71%) for correctly identifying the owner,
however, this comes 1. at the cost of the lowest detec-
tion rate for non-owner-data and 2. also a long de-
tection time of more than 10 minutes (611 seconds).
It should also be noted that GMM-based approaches
allow for a more precise statement, be it on user- or
non-user-data. This seems to be a manifestation of the
generative property those models possess.
If a good trade-off between success rates for user
and novelty detection is targeted, an ensemble with a
majority with 3 (ENS
3
) is the best choice, with the
highest total success rate of 85.55% and a rather ac-
ceptable detection time of 284 seconds in average.
5 THEFT DETECTION
To train an autonomic theft detection for smart de-
vices, it is necessary to train user models, that are
as specific as possible.In terms of high quality data-
descriptions, estimations via GMMs are very suitable.
AR-datasets as used in this study of feasibility can
be collected explicitly or implicitly while a user fol-
lows his regular routine. With the goal of detecting
unknown data (e.g., data from non-owners), please
note that our modelling approach is not limited to a
labeled dataset, but instead models the data distribu-
tion, no matter if classes are available or not. Labeled
data just provides additional information, so that the
false alarm rate can be minimized (see below). The
techniques are also not limited to the simple activi-
ties chosen for this study, and the techniques can be
adapted to more complex activities. Of course, sev-
eral sessions of data, as used here, allow for a better
fine-tuning of the models and are thus advisable.
Hijacked Smart Devices - Methodical Foundations for Autonomous Theft Awareness based on Activity Recognition and Novelty Detection
139
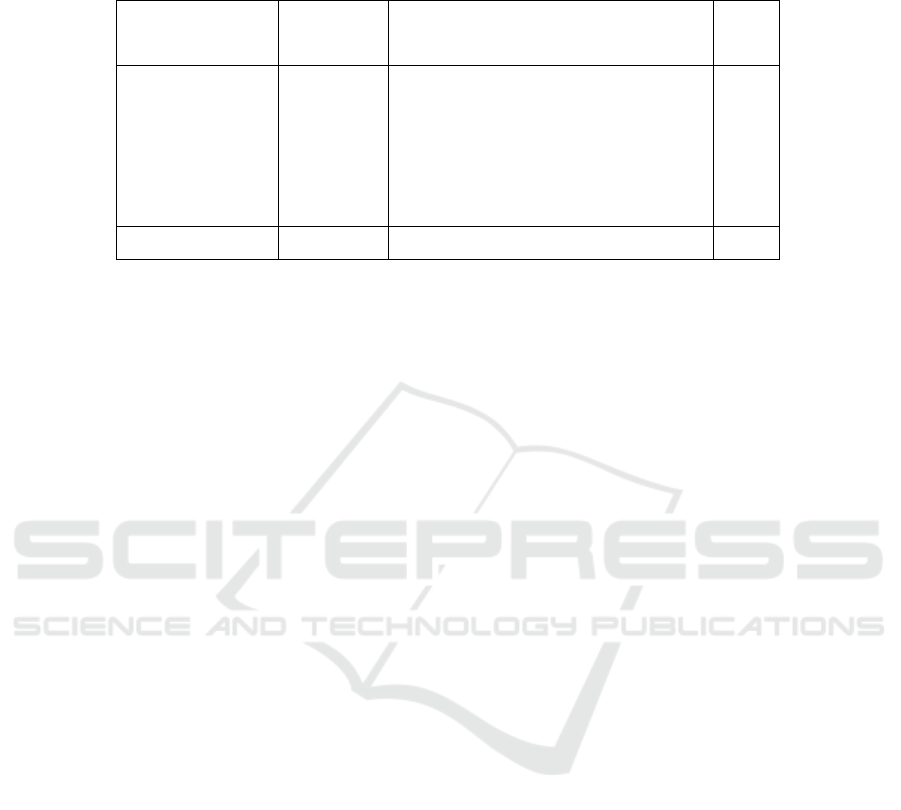
Table 3: Comparison of the success rates and detection times for theft detection methods with suggested novelty configurations
as described in Section 4.1 and Section 4.2 and a parameter optimized ν-SVM. Total success rate is calculated as the mean of
user and thief success rates. Time is calculated as the mean of the successfully detected thefts.
Parameter Success Rate Time
Method α γ user [%] non-owner [%] total [%] [s]
V-VAL 0.80 0.4 75.71 79.45 77.58 325
ENS
1
0.80 0.2 68.57 96.59 82.58 219
ENS
2
0.95 0.6 70.00 96.04 83.02 246
ENS
3
0.75 0.7 77.14 93.96 85.55 284
ENS
4
0.75 0.7 85.71 69.34 77.53 611
One-Class SVM ν = 0.05 84.29 36.04 60.17 1060
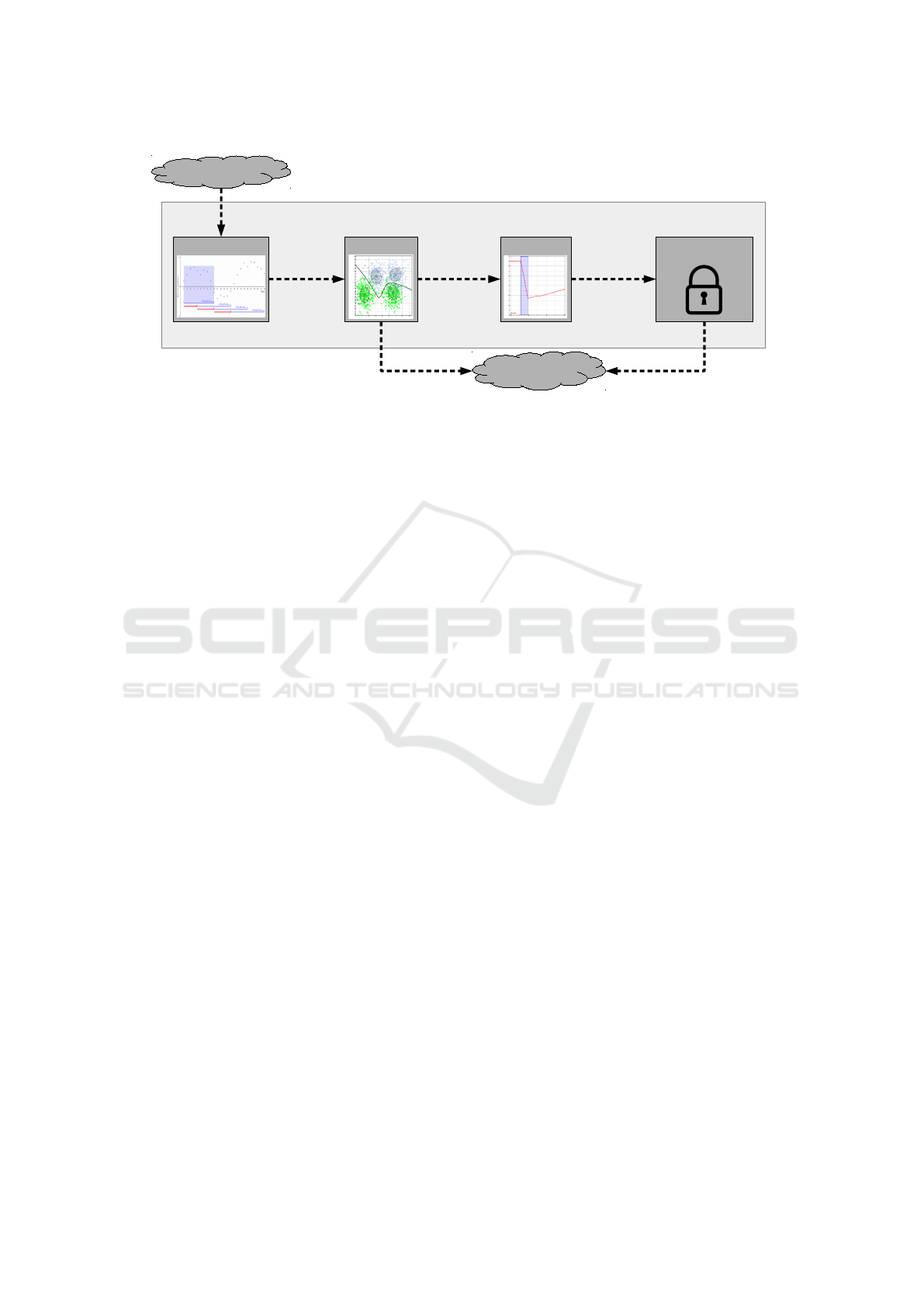
In Figure 7 such a system with all it’s compo-
nents is sketched. Visualized are involved compo-
nents (dark gray rectangles), the data flow (dashed ar-
rows), input source (the environment) and resulting
output source (the smartphone’s operating system).
Suppose that the overall system is consisting of a
classification component and a detection component.
Even though other algorithms might be eligible, the
following explanations focus on a CMMs as model in
conjunction with a penalty/reward-based Novelty De-
tection in the same manner as described in Section 4.
As the classifier is a probabilistic one, information
about certainty for each output are available. When-
ever the classifier is certain enough about an activity
prediction, the observed sample can be forwarded to
the detection part of the system. In that part, the mea-
sure is updated and compared to the given threshold γ.
Whenever the measure falls below that threshold, the
device could sample a soundclip and gps-annotated
picture (or video) footage and transmit it to a prede-
fined location, server, backup- or rescue-address for
the owner to review. Next actions could, e.g., be the
shutoff of the device, the request for a pin, the activa-
tion of cryptographic code to secure sensible data or
alike.
Two unknown numbers were just mentioned, one
was a certain enough class prediction, the other one
was a given threshold for novelty (or in this case theft-
) detection. Concrete values are highly application
specific, but usually a user would not want a hyper-
sensitive smart device, but instead a very reliable theft
detection (cf. Section 4.4). So one goal is a minimal
false alarm rate, which can be achieved by defining a
high class prediction certainty, along with a threshold,
that matches the novelty detections sensitivity param-
eter η.
Those parameter estimations need data from non-
owners, otherwise the adaptation to the user might not
be specific enough (cf. Section 4.3, with a good de-
tection of the rightful user but no more). Such data is
usually not available on a user’s device, but with cloud
connected devices everywhere, it would be possible
to push user-models into the cloud anonymously and
make it available for other users. Especially when you
think of a new device generation and only a fraction
of users participating in this setup, everyone would
benefit, as the novelty detection parameters could be
adjusted very user-specific. In such a manner, every
device of that new generation could be secured and
autonomuously react to detected thefts.
A technical implementation of the overall system
needs to make sure, that the following points are cov-
ered:
1. Initialization. The cold start phase of the system,
is crucial for correct functioning. While the per-
sonalization and adaptation to the user is impor-
tant, an average model (e.g., data collected by the
manufacturer prior to release) for detecting every-
day activities can be used as a good starting point.
For a correct initialization, the system should also
occasionally question the user for feedback, as,
e.g., done in the Active Learning domain (cf., e.g.,
(Atlas et al., 1990)). During initialization, a set of
activities that can be detected reliably for the de-
vice’s user, should be fixed.
2. Online operation. After a successful initial-
ization, the theft detection can start to work.
Parameter-tweaking can be done via, e.g., non-
owner models that are provided via the manu-
facturers or even a public cloud with movement
models. To avoid confusion of the system or a
watering of the model precision, the novelty de-
tection should only receive data, when the clas-
sifying component is very certain. Again, this is
a strong argument for the usage of simple activi-
tiesm which can be detected very reliably.
3. Detection action. As soon as the novelty measure
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
140
Environment
Smartphone OS
Autonomous theft detection
Classifier Detector Privacy Guard
Sensory
Data
Non-Owner Data
Detected
Predicted Activity
−2.5
−2.25
−2
−1.75
−1.5
−1.25
−1
−0.75
−0.5
−0.25
0
0.25
0.5
0.75
1
1.25
1.5
1.75
2
2.25
2.5
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
Dimension 0
Dimension 1
#components: 4
test error: 0.08
train error: 0.10
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
0 2 5 50 75 100 12 5 150
novelty
step
novelty
Securing action
Prediction with
high certainty
Extracted
features
Preprocessing
Figure 7: Schematic visualization of theft detection on a smartphone. Sensors signals come from effects in the environment
(acceleration, sound, etc.) and are preprocessed. Prepared features are put into a classifier for activity recognition and into
a detection unit. While the classifier predicts the user’s current activity only, the detector identifies foreign data (based on
the data model of the classifier) and triggers a privacy protecting guard if necessary. As a result, sensible information on the
smartphone can be locked and made inaccessible to a thief.
is below the predefined threshold, the user action
that was configured, should be taken. This could
range from locking the device, via requesting a se-
cure pin or answering a secret question to wiping
all data, depending on the user’s initial configura-
tion.
6 SUMMARY & OUTLOOK
In this article, we based a novelty detection on top
of an Activity Recognition (AR) process to realize a
prototypical theft detection. Even though our experi-
ments were based on five simple activities, the CMM
is based on the structure of data and thus not confined
to these exact activities. Followingly, the exact classes
only play a role for the activity recognition part, but
not for modelling a user by means of his data. This
is very advantegous, because no matter how precise
how many activities can be recognized: thefts can be
detected based on very simple activities, that can be
predicted very well and are nowadays included in ev-
ery smartphone and fitness tracker from factory.
In Section 4 several techniques for detecting novel
data in the input space were investigated and com-
pared to a One-class SVM approach. The comparison
revealed that there is no overall best technique, but
that an implementation should be chosen with respect
to an application specific requirement: the always
present trade-off between detection accuracy and de-
tection speed. Even though One-class SVMs are com-
monly used for the task of anomaly detection, even
with a parameter optimization, we were not able to get
the SVM to function comparably well as our GMM
based novelty detection approach. A recommendation
can be made for ensemble based techniques due to
several reasons: First, each part of the ensemble can
be trained independently, which allows for a speed up
by parallelization. Second, less data is necessary to
train each competetive ensemble member. And fi-
nally, even small ensembles (three members) reveal
a very good and robust performance, when compared
to other models that were trained on larger datasets or
with higher computational effort. Based on the ability
to detect data that deviates from a learned model, we
sketched the usage of an autonomuous theft detection
to secure user data in Section 5. Most remarkable is
the fact, that even with just five daily activities, the
detection works very well.
In general, SVMs perform reasonably well in Ac-
tivity Recognition scenarios and are a good approach
that could be focused more intensively (Lau et al.,
2010). As an alternative to our performed grid search,
better techniques like a Bayesian Optimization on
training parameters might be worth considering. To-
wards theft detection, an even further spanned input
space would be interesting, e.g. by incorporating
more available sensors. Taking the theft detection to-
wards a realization, it is necessary to conduct experi-
ments with data not only from smartphones, but also
from other smart devices (smart watches, smart in-
frastructure, ...). Finally, another interesting research
question should aim at the structure of detected out-
liers: Are they random or do they form a new cluster
in the input space? While random points might be a
result of sensor noise, coherent points might be the
result of something else. This question can be ad-
dressed by methods like CANDIES, as described in
(Gruhl and Sick, 2016).
Hijacked Smart Devices - Methodical Foundations for Autonomous Theft Awareness based on Activity Recognition and Novelty Detection
141

ACKNOWLEDGEMENTS
The authors would like to thank the German
research foundation (Deutsche Forschungsgemein-
schaft, DFG) for the financial support in the context
of the “Organic Computing Techniques for Runtime
Self-Adaptation of Multi-Modal Activity Recognition
Systems” project (SI 674/12-1).
REFERENCES
Abowd, G., Dey, A., Brown, P., Davies, N., Smith, M., and
Steggles, P. (1999). Towards a better understanding
of context and context-awareness. In Proc. of HUC,
pages 304–307. Springer.
Amer, M., Goldstein, M., and Abdennadher, S. (2013). En-
hancing one-class support vector machines for unsu-
pervised anomaly detection. In Proceedings of the
ACM SIGKDD Workshop on Outlier Detection and
Description, ODD ’13, pages 8–15, New York, NY,
USA. ACM.
Atlas, L. E., Cohn, D. A., and Ladner, R. E. (1990). Train-
ing connectionist networks with queries and selective
sampling. In Touretzky, D. S., editor, Advances in
Neural Information Processing Systems 2, pages 566–
573. Morgan-Kaufmann.
Bishop, C. M. (2006a). Pattern Recognition and Machine
Learning, chapter 10 Variational Inference, pages 461
– 486. Springer, New York, NY.
Bishop, C. M. (2006b). Pattern Recognition and Machine
Learning. Springer, New York, NY.
Chen, L., Hoey, J., Nugent, C. D., Cook, D. J., and Yu,
Z. (2012). Sensor-based activity recognition. IEEE
Transactions on Systems, Man, and Cybernetics, Part
C (Applications and Reviews), 42(6):790–808.
Clarkson, B., Mase, K., and Pentland, A. (2000). Recog-
nizing user context via wearable sensors. In Proc. of
ISWC, pages 69–75.
Fernndez-Francos, D., Martnez-Rego, D., Fontenla-
Romero, O., and Alonso-Betanzos, A. (2013). Au-
tomatic bearing fault diagnosis based on one-class ν-
svm. Computers & Industrial Engineering, 64(1):357
– 365.
Fisch, D., J
¨
anicke, M., Kalkowski, E., and Sick, B.
(2009). Learning by teaching versus learning by do-
ing: Knowledge exchange in organic agent systems.
In Intelligent Agents, 2009. IA’09. IEEE Symposium,
pages 31–38. IEEE.
Franke, T., Lukowicz, P., Kunze, K., and Bannach, D.
(2009). Can a mobile phone in a pocket reliably rec-
ognize ambient sounds? In Wearable Computers,
2009. ISWC’09. International Symposium on, pages
161–162. IEEE.
Gellersen, H., Schmidt, A., and Beigl, M. (2002). Multi-
sensor context-awareness in mobile devices and
smart artifacts. Mobile Networks and Applications,
7(5):341–351.
Gruhl, C. and Sick, B. (2016). Detecting novel pro-
cesses with CANDIES - an holistic novelty detec-
tion technique based on probabilistic models. CoRR,
abs/1605.05628.
Guerbai, Y., Chibani, Y., and Hadjadji, B. (2015).
The effective use of the one-class {SVM} classi-
fier for handwritten signature verification based on
writer-independent parameters. Pattern Recognition,
48(1):103 – 113.
Junker, H., Amft, O., Lukowicz, P., and Trster, G. (2008).
Gesture spotting with body-worn inertial sensors to
detect user activities. Pattern Recognition, 41(6):2010
– 2024.
Kephart, J. and Chess, D. (2003). The Vision of Autonomic
Computing. IEEE Computer, 36(1):41–50.
Kwapisz, J., Weiss, G., and Moore, S. (2011). Activity
recognition using cell phone accelerometers. ACM
SIGKDD Explorations Newsletter, 12(2):74–82.
Lau, S. and David, K. (2010). Movement recognition using
the accelerometer in smartphones. In Future Network
and Mobile Summit, 2010, pages 1–9. IEEE.
Lau, S., K
¨
onig, I., David, K., Parandian, B., Carius-D
¨
ussel,
C., and Schultz, M. (2010). Supporting patient moni-
toring using activity recognition with a smartphone. In
Wireless Communication Systems (ISWCS), 2010 7th
International Symposium on, pages 810–814. IEEE.
Li, K.-L., Huang, H.-K., Tian, S.-F., and Xu, W. (2003). Im-
proving one-class svm for anomaly detection. In Ma-
chine Learning and Cybernetics, 2003 International
Conference on, volume 5, pages 3077–3081. IEEE.
Markou, M. and Singh, S. (2003a). Novelty Detection: a
review – part 1: statistical approaches. Signal Pro-
cessing, 83:2481–2497.
Markou, M. and Singh, S. (2003b). Novelty Detection: a re-
view – part 2: neural network based approaches. Sig-
nal Processing, 83:2499–2521.
Sch
¨
olkopf, B., Williamson, R. C., Smola, A. J., Shawe-
Taylor, J., Platt, J. C., et al. (1999). Support vector
method for novelty detection. In NIPS, volume 12,
pages 582–588.
Sun, L., Zhang, D., Li, B., Guo, B., and Li, S. (2010). Activ-
ity recognition on an accelerometer embedded mobile
phone with varying positions and orientations. Ubiq-
uitous Intelligence and Computing, pages 548–562.
Tax, D. and Duin, R. (2002). Uniform Object Generation
for Optimizing One-class Classifiers. The Journal of
Machine Learning Research, 2:155–173.
Tomforde, S., Sick, B., and M
¨
uller-Schloer, C. (2017).
Organic Computing in the Spotlight. arXiv.org.
http://arxiv.org/abs/1701.08125.
Zhang, Y., Meratnia, N., and Havinga, P. (2009). Adap-
tive and online one-class support vector machine-
based outlier detection techniques for wireless sen-
sor networks. In 2009 International Conference on
Advanced Information Networking and Applications
Workshops, pages 990–995.
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
142
