
RPI.Social: Simple Enactment and Execution of First-Class Agent
Interaction Protocols
Atef Nouri and Wided Lejouad Chaari
Laboratoire COSMOS, ENSI, University of La Manouba, 2010 La Manouba, Tunisia
Keywords:
First-Class Agent Interaction Protocols, Multiagent Systems, Executable Interaction Protocols, Role Enact-
ment, Agent-Oriented Software Engineering.
Abstract:
In Multiagent systems, first-class interaction protocols are those whose implementations are decoupled from
the agents. A previous work has introduced the RPI framework (Role Playing Interactions) and established the
contribution of RPI.Idiom which is a high-level language for the definition of such protocols. In this paper, we
present RPI.Social which is a social engine associated with the agent to help it use interaction protocols written
in RPI.Idiom. RPI.Social has two components: RPI.Social.IoP (for Initiate or Play) and RPI.Social.Exec. The
first component deals with discovering and initiating interaction protocols for an agent which has a goal that
could only be pursued through interacting. The same component is also used by agents invited for interaction
to decide whether to participate or to decline the invitation. The second component serves as an interpreter of
interaction protocols with several mechanisms and rules to coordinate and share results amongst the interacting
agents. The main contribution of this paper is a solution for agents to automatically identify and execute first-
class interaction protocols.
1 INTRODUCTION
Multiagent systems (MAS) have two defining core
concepts: agents and interactions. Despite the equal
importance they both share in the definition of MAS,
the focus has always been put on agents. Indeed, re-
search on interactions has previously dealt with com-
munication languages, documentation (e.g. negoti-
ation protocols) (Miller and McBurney, 2007) and
the game theoretical aspect of interaction protocols
(Shoham and Leyton-Brown, 2008), etc. In contrast,
agents have been studied as single autonomous ob-
jects (mobility, BDI, etc.) and as interacting enti-
ties (institutions (Morales et al., 2017), organizations
(Jensen, 2015), roles, etc.). As a result, over the years,
agents have become more capable at performing in
their environments while interaction protocols grew
more diverse. Nevertheless, as part of the effort to
efficiently document interaction protocols, there have
been several works that have dealt with the abstrac-
tion of interactions. These efforts started with early
MAS methodologies and design formalisms, notably
AUML (Bauer et al., 2000). The aim of these works
was to decouple interactions and agents at design
time. Some works in the last decade took the decou-
pling to the implementation phase so that the inter-
action’s code is no longer intertwined with the inter-
acting agents’. Such interactions are interchangeably
called reified (Khalfaoui and Chaari, 2013) and first-
class (Miller and McBurney, 2007).
As easy as specifying an interaction protocol
amongst abstract roles using some notation could be,
the actual interpretation of such specification hides
some tedious tasks that have to be performed by the
interacting agents. In fact, in the case of second-class
interactions, agents know by design the course of ac-
tion that has to be taken and the execution is automat-
ically based on little to no deliberation on the actual
content of the interaction i.e. the agent trusts that its
programmer:
• has taken care of checking the preconditions and
the postconditions of the interaction; and
• made sure that the goal for which the interaction is
executed in the first place would be possibly ful-
filled by the end of the exchange.
On the other hand, agents interacting using first-class
interaction protocols need to have the capabilities to:
• match their goals for interacting with the end re-
sult of the interaction protocol;
• initiate an interaction protocol or take a role in
one;
Nouri, A. and Chaari, W.
RPI.Social: Simple Enactment and Execution of First-Class Agent Interaction Protocols.
DOI: 10.5220/0006599400910102
In Proceedings of the 10th International Conference on Agents and Artificial Intelligence (ICAART 2018) - Volume 1, pages 91-102
ISBN: 978-989-758-275-2
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
91

• enact roles in protocols;
• execute the operations assigned to their roles.
In order to provide the aforementioned capabili-
ties to agents, we propose RPI.Social, a social engine
associated with the agent to endow it with the abil-
ity to take roles in the execution of interaction proto-
cols. A previous work (Nouri et al., 2015) has intro-
duced RPI.Idiom which is a high-level language for
implementing first-class interaction protocols within
a framework baptized Role Playing Interactions (or
RPI). Along with the descriptive language, RPI pro-
vides through RPI.Social mechanisms for the agents
to be able to reason on interaction protocols and exe-
cute them.
The purpose of this paper is to introduce
RPI.Social and give an overview on its inner work-
ings. The present paper does not attempt to demon-
strate the properties of RPI.Idiom interaction proto-
cols that are enumerated in Section 2.2 since the lan-
guage was fairly presented in (Nouri et al., 2015).
Likewise, RPI.Inference is not covered by this paper.
The rest of this paper is organized as follows.
Section 2 is a brief introduction of RPI framework.
RPI.Social.IoP, the unit used for enacting interactions
and roles is detailed in Section 3. RPI.Social.Exec is
presented in Section 4. Section 5 gives an overview
on RPI.Inference. Section 6 is an exposition of some
related works with comparisons that aim to position
RPI.Social in the literature and highlight its contribu-
tion. Section 7 is the conclusion.
2 RPI FRAMEWORK
This Section gives an overview of the features and
aims of the RPI framework and its components.
2.1 RPI Framework Overview
The Role Playing Interactions framework proposes an
approach to separate interaction protocols from the
agents. The goal of RPI is to provide a common envi-
ronment for implementing and executing interaction
protocols that have these properties:
• To be role-based i.e. to be defined between a set of
abstracting roles instead of the actual interacting
agents.
• To be automatically enactable and executable i.e.
agents should be self-sufficient in enacting roles
in the interaction protocol and in executing their
parts in it.
• To have a generic structure i.e. the unit of con-
struction of the interaction is a behaviour which
covers the actions of transmission and reception
of messages, as well as any action or service that
the underlying agent could perform or provide.
• To have a meaning and to be socially generic
i.e. each unit of construction has its own ex-
plicit meaning. The meanings attributed to the
construction units are independent from the social
prescriptions (e.g. commitments) which defines
the property of social genericity.
• To be modular in order to support the reuse and
the potential composition of protocols.
Similarly, an agent within the RPI environment has a
set of properties:
• Its implementation excludes interactions and ex-
plicit references to external implementations of
interaction protocols.
• It has a set of state variables and another one for
social behaviours that both are exposed to other
agents to the roles played in interactions.
• At a given moment during runtime, it may have a
goal which is expressed in the same language as
the constraints in RPI.Idiom (see 2.2). To fulfill
its goal, the agent either takes individual actions
or it starts interaction.
• It has a social engine that manages the whole pro-
cess of interacting with other agents. The social
engine which is specified by RPI is a defining part
of an agent within the framework.
RPI is divided into several component sub-
systems that achieve a part of the functionalities pro-
vided by the framework (Fig. 1).
The central sub-system of the framework is
RPI.Idiom which is the language for defining inter-
action protocols. Section 2.2 gives a quick overview
of the language and its main features.
RPI.Idiom interaction protocols are managed by
RPI.Library. This sub-system provides the developer
with a tool for managing the repository of protocols.
It also plays the role of interaction protocols broker to
the agents within the framework.
The RPI.Social sub-system is the social engine as-
sociated with an agent. This sub-system has two com-
ponent units:
• RPI.Social.IoP for initiating interactions and/or
playing roles in them; and
• RPI.Social.Exec for performing behaviours asso-
ciated with the agent’s role within an interaction
protocol.
The features of RPI.Social are detailed in Section
3 and 4.
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
92
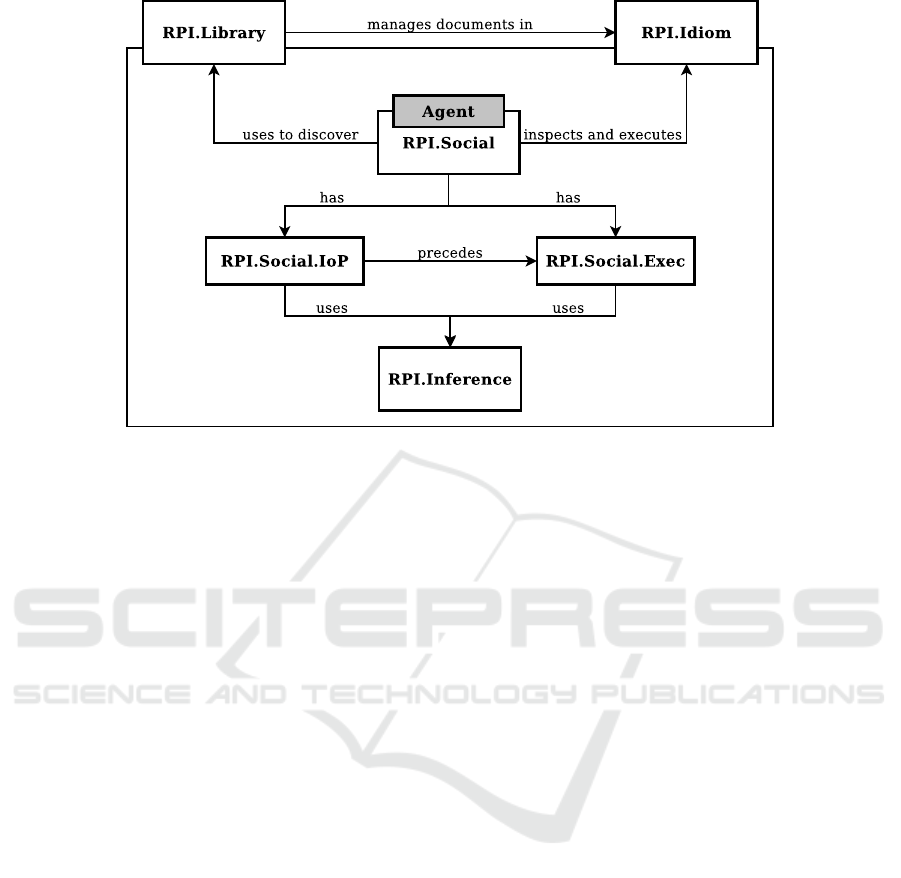
Figure 1: Interdependence within RPI.
RPI.Inference is the sub-system responsible for
providing the tools to RPI.Social to reason on inter-
action protocols to decide whether to pick the proto-
col to achieve a given goal, or if a behaviour is well-
executed during an interaction. An overview of the
tools RPI.Inference provides is given in Section 5.
2.2 RPI.Idiom Overview
RPI.Idiom is a high-level language for implementing
first-class interaction protocols. Protocols specified
in RPI.Idiom verify the properties of the RPI frame-
work mentioned in the previous Section (2.1). An
RPI.Idiom interaction protocol has two parts:
• a data template in which the data and the roles
relevant to the interaction are declared; and
• a process template that defines the actual interac-
tion in terms of behaviours.
As Fig. 3 shows, the process template which is
the part that specifies the interaction protocol is de-
fined by a premises system and a move. The former
is basically a declaration of the predicates and the ax-
ioms using them that would be used in the latter. The
move is the actual process that specifies how the in-
teraction would be executed. A move has two con-
straints: one to denote its precondition and the second
for its postcondition. These constraints are expressed
using the predicates declared in the premises system.
A constraint is a ground formula that could be atomic
(i.e. a literal) or composite (i.e. a conjunction or a
disjunction of ground formulas). The move could be
atomic or composite, where the latter is defined as a
composition of moves.
There are four composition operators to combine
moves:
• and-seq(M): a sequence of sub-moves M;
• and-con(M): a set of concurrent sub-moves M;
• xor(M): a choice of exactly one sub-move from
M; and
• or(M): a subset of concurrent sub-moves from M,
or -alternatively- a subset choice.
The constraints of the combined moves are also
composed using the following rules:
• for xor and or operators, the constraints of the
move are the disjunction of the respective con-
straints of the underlying sub-moves;
• for and-con operator, the constraints of the com-
posite move are the conjunction of the respective
constraints of the underlying sub-moves; and
• for and-seq operator, the constraints of the com-
posite move are the conjunction of the respective
constraints of the sub-moves after eliminating the
inconsistent constraints, i.e. only the initial pre-
conditions and the final postconditions are kept.
An atomic move, on the other hand, is defined by
an instance of a behaviour belonging to a role, the
sets of inputs and outcomes, and the usual constraints
for the move. The precondition of the atomic move
acts as a filter on the inputs while its postcondition
specifies the effect of performing the behaviour on the
outcomes.
RPI.Social: Simple Enactment and Execution of First-Class Agent Interaction Protocols
93
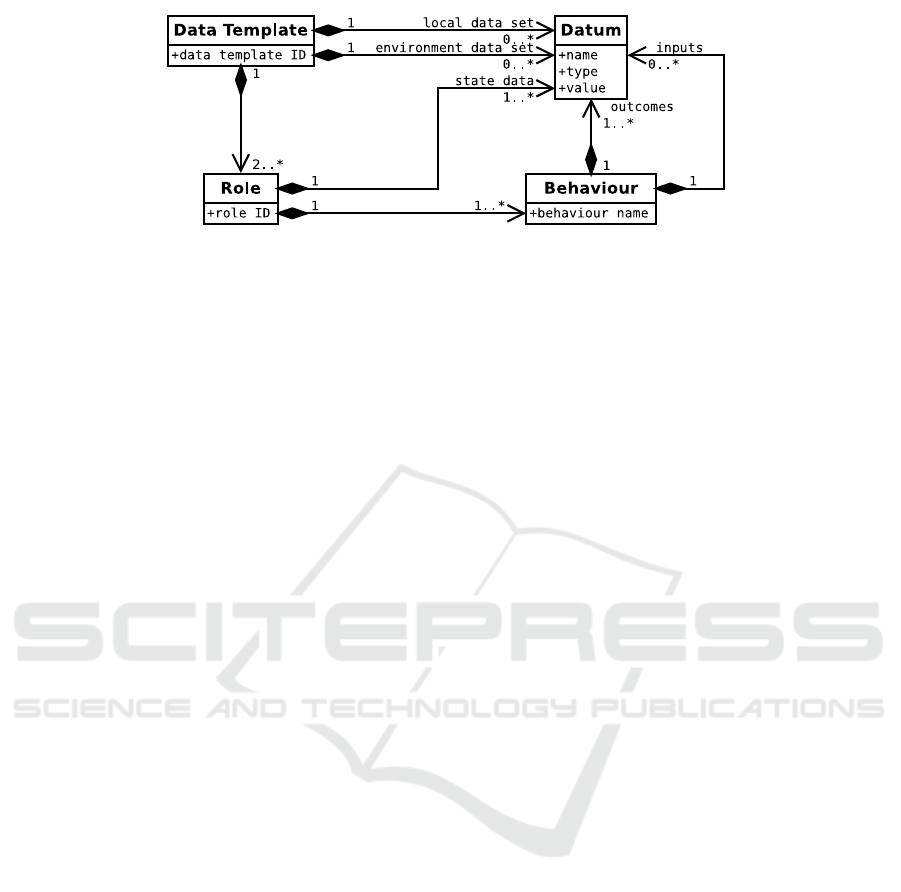
Figure 2: Structure of the data template in RPI.Idiom.
A role is defined by a data set that tracks its state
during the interaction and a set of behaviours that the
role player should be able to perform. The declara-
tion of the set of roles that would be placeholders for
the interacting agents within an RPI.Idiom protocol
is done in the data template. As shown in Fig. 2,
this part of an RPI.Idiom interaction protocol specifi-
cation also contains the declaration of two data sets.
The first is the environment data set which contains
the bare necessary knowledge about the environment
for the interaction protocol while the second is the lo-
cal data set which contains temporary knowledge for
the span of the interaction. The elements of three data
sets (roles’ states, environment’s, local’s) are used as
inputs and outcomes for the behaviour instances that
represent the atomic moves in the protocol.
3 RPI.Social.IoP: ENACTMENT OF
INTERACTION PROTOCOLS
AND ROLES
In the previous Section, we gave a glimpse of
RPI.Idiom, the language to use for the specification
of interaction protocols in RPI. RPI.Idiom is consid-
ered to be the static dimension of interactions in the
framework. The dynamic dimension is ensured by
both units of RPI.Social. This Section puts the focus
on RPI.Social.IoP (Initiate or Play) that is the first of
these two units. RPI.Social.IoP is basically an interac-
tion that transcends RPI which purpose is to bootstrap
RPI interaction protocols.
RPI.Social.IoP has two complementary protocols:
an active one for initiating interactions and a passive
one for receiving and responding to invitations to play
roles in interactions. In each of the protocols, the so-
cial engine of the agent is in one of a given set of
states at all times. Transitions between states are de-
fined by events such as receivinga notification or data,
or reaching a milestone in the enactment of the inter-
action protocol. A transition usually triggers an al-
gorithm executed by the social engine of the agent to
advance the enactment of the interaction protocol.
The intuition behind RPI.Social.IoP is the need for
establishing an ad-hoc agent organization for the in-
teraction protocol since an RPI interaction requires
permanent agents for its span. This way, the mem-
bers of the organization should play the roles in the
interaction. This is similar to the TCP connection
establishment through the three-way handshake pro-
cess. Due to that similarity, we represent the state-
transition aspect of RPI.Social.IoP as a finite state ma-
chine (FSM). Fig. 4 depicts the state machine for an
initiator agent. Likewise, Fig. 5 is the state machine
for a non-initiator agent. A second aspect of the unit
is algorithmic and it defines the behaviour of the agent
in a given state (e.g. in the Idle state, the agent awaits
for a triggering event to happen as seen in the state
machines).
3.1 Social Engine States in
RPI.Social.IoP
The social engine of an agent could be in one of eight
states. One of those states is the initial state called In-
valid (denoted by the solid filled circle in Fig. 4 and
Fig. 5). It is a temporary state in which the agent
is being initialized and is consequently not ready for
interacting. As soon as the initialization is properly
done, the social engine of the agent transits automati-
cally and irreversibly from Invalid to Idle. The other
six states are Fetching, Waiting Response, Waiting Ap-
proval, Starting Interaction, Idle Interaction and Busy
Interaction.
In the Idle state the social engine is neither at-
tempting to enact a role nor executing an interaction
protocol. In the case when the agent comes across a
goal that could not be attained but through interact-
ing, the social engine turns to the Fetching state and
starts searching for an interaction protocol that helps
it fulfill that goal. If no sufficient interaction protocol
is found, the social engine rolls back to the Idle state.
However, if a candidate interaction protocol is found,
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
94

Figure 3: Structure of the process template in RPI.Idiom.
an invitation to play a role in that particular protocol is
sent to a set of agents that could be selected based on
one or more criteria like proximity, etc. The invitation
takes the form of a PROPOSE message embedding
the identifier of the interaction protocol. The mes-
sage is broadcast to the chosen agents. Upon sending
the invitation, the social engine of the initiator agent
switches to the Waiting Response. In that state, the
social engine is passively waiting for potential candi-
dates to enact roles in the proposed interaction proto-
col. The candidatures are ranked by default from the
first to be received which holds the highest priority, to
the last positive reply to the invitation which has the
least priority. If the initiator fails to establish an ad-
hoc agent organization for the interaction, it rejects all
the candidatures and reverts to the Fetching state.
From an invited agent’s perspective, its social en-
gine does not accept invitations unless it is in the Idle
state. If the social agent does not accept to play a role,
it sends a REJECT
PROPOSAL to the initiator. Oth-
erwise, it sends an ACCEPT
PROPOSAL message to
the initiator agent and embed its candidature in the
content of the message, then it switches to the Waiting
Approval state in which it awaits for two events: the
acceptation of the candidature coming from the ini-
tiator and the complete foundation of an ad-hoc agent
organization for the purpose of instantiating the in-
teraction protocol. In the case of a rejection from the
initiator due to failure to form the ad-hoc organization
or any other reason, the invited agent turns back to the
Idle state.
Figure 4: FSM for initiating interactions in RPI.
When all the role players are gathered together to
interact, the interaction starts and the social agent of
every agent taking part in it goes immediately to the
Starting Interaction state.
The work of RPI.Social.IoP ends when an agent
goes to either the Idle Interaction or the Busy Interac-
tion states. Both of the latter states and the transitions
related to them (transitions (7) to (12) shown in Fig.
4 and Fig. 5) are part of RPI.Social.Exec as explained
in Section 4.
RPI.Social: Simple Enactment and Execution of First-Class Agent Interaction Protocols
95

Figure 5: FSM for responding to invitations to interacting
in RPI.
The tables 1 and 2 complement respectively fig-
ures 4 and 5 with the exhaustive state transitions in
the realm of RPI.Social.IoP as well as their triggering
events and the actions that are executed right before
the transition.
3.2 RPI.Social.IoP Mechanics
While being in a given state or in the process of tran-
siting from one state to another, the social engine
may execute algorithms that attempt to match data be-
tween the agent and the role, and to evaluate precon-
ditions and postconditions. These algorithms define
the inner workings of RPI.Social.IoP.
3.2.1 Initiation of an Interaction
As soon as the social engine enters the Fetching state,
it starts executing the algorithm for fetching proto-
cols. Before starting the algorithm, the social en-
gine queries the repository of interaction protocols
for an enumeration of all its available items and sets.
The search for an adequate protocol could be done
on multiple rounds until either an ad-hoc organization
is formed and the interaction is started, or the proto-
cols enumeration is entirely exhausted and no match
is found.
On each fetching round, the social engine picks
the first protocol that satisfies a following set of the
agent’s requirements:
• The agent is able to play a role in the interaction.
• The agent is able to acquire and lock environment
resources needed for the interaction (i.e. environ-
ment data set as defined in the RPI.Idiom specifi-
cation of the protocol).
• The precondition of the interaction is contingent
(i.e. its truth value is true or unknown) for the
agent’s current state (i.e. the state of the role that
the agent relates to should allow it to be poten-
tially able to start the interaction).
• The postcondition of the interaction protocol
should potentially satisfy the agent’s goal (i.e. it
should not be in contradiction with the goal).
The social engine acquires the environment data
prescribed in the RPI.Idiom interaction protocol us-
ing the same method of matching for role data sets as
described later in the identification to a role in an in-
teraction protocol process. Each of these resources
is locked to be exclusively used by the role players
during the interaction.
The whole purpose of initiating an interaction for
an agent is to achieve a goal which is unreachable oth-
erwise. For that reason, verifying the alignment of the
interaction protocol’s postcondition with the agent’s
goal is part of the selection of the protocol. The first
part of the verification is the unification between the
expressions of both the goal and the postcondition.
The second and last part is to establish whether the
postcondition entails the goal. The entailment is veri-
fied using RPI.Inference seen later in Section 5.
3.2.2 Responding to an Invitation to Interact
Upon the reception of a PROPOSE message to play
a role in an interaction while in the Idle state, a posi-
tive response to the invitation depends on two require-
ments on the invited agent’s side:
• Like the initiator, the agent should be able to play
a role in the interaction.
• The precondition of the interaction is contingent
for the agent’s current state in the same manner as
the initiator.
If the two requirements are met, the agent responds
with an ACCEPT
PROPOSAL message otherwise it
sends back a REJECT PROPOSAL.
3.2.3 Identification to a Role in an Interaction
Protocol
In order to identify with a role in an interaction proto-
col, the agent runs the algorithm for picking a role to
play in the interaction protocol. Along with the inter-
action protocol as an input to the algorithm, there is
a flag that indicates if the agent is the initiator of the
interaction. For each role defined in the protocol, the
agent attempts to generate a profile for that particular
role. If the profile is generated, the agent uses it to
prepare a candidature object that will be sent to the
other potential role players.
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
96

Table 1: State transitions for an initiator agent.
Transition Trigger Action
Invalid → Idle (0) The social engine is properly initialized None
Idle → Fetching
(1)
The agent decides that interacting is needed to
attain a goal
None
Fetching → Idle
(2)
No sufficient interaction protocol is found None
Fetching → Wait-
ing Response (3)
The agent finds a candidate interaction protocol Send PROPOSE [broad-
cast/multicast] {interaction protocol
identifier}
Waiting Response
→ Fetching (4)
Waiting for candidatures timeout is up Send CANCEL [broad-
cast/multicast]
Waiting Response
(5)
Receive ACCEPT PROPOSAL [candidate]
{candidature of the sender}
Send FAILURE [candidate] if the
candidature is unintelligible
Waiting Response
(5)
Receive REJECT PROPOSAL [invited agent] None
Waiting Response
(5)
Receive ACCEPT PROPOSAL [candidate]
{candidature of the sender} and all the roles
could be filled
Form an ad-hoc organization of role
players and send CONFIRM to ev-
eryone of them
Waiting Response
(5)
Receive FAILURE [role player] after the CON-
FIRM messages are sent to the role players
Re-send CONFIRM [role player]
{role players list}
Waiting Response
(5)
Receive INFORM [role player] {sender’s can-
didature}
Send INFORM [role player] {own
candidature}
Waiting Response
→ Starting Inter-
action (6)
Receive CONFIRM [role player] from every
role player
Go to RPI.Social.Exec
Waiting Response
→ Fetching (4)
Receive CANCEL [role player] Send CANCEL [broad-
cast/multicast]
Waiting Response
→ Fetching (4)
Receive ACCEPT PROPOSAL [candidate]
{candidature of the sender} and all the roles
could be filled but the agent organization could
not be formed
Send CANCEL to every role player
Waiting Response
→ Fetching (4)
An unrecoverable failure Send CANCEL [broad-
cast/multicast]
The generation of a role profile is simply made
by matching the state data set of the role and its be-
haviours with the internal state and the capabilities of
the agent. The matching of data is done on both types
and labels. Matching labels could be either word by
word or semantic in accordance to an external con-
figuration set by the designer of the multiagent appli-
cation. Similarly, the matching of the behaviours is
performed on the label of the behaviour as well as on
its input and output data.
3.2.4 Evaluation of the Precondition
At the fetching stage of initiating an interaction in
RPI, the precondition of the protocol is evaluated. Its
truth value could be true, false or unknown. At this
stage, the agent is interested in the possibility of run-
ning the interaction protocol; accordingly, it checks
the precondition for contingency i.e. the social engine
plugs in the precondition the values of the environ-
ment data set and the state data set items that belong
to the role the agent identifies to, then checks if the
truth value of the expression is not false. Both true
and unknown truth values are acceptable to pick the
interaction protocol since the values attributed to the
state data sets of the other roles are unknown at the
time of the evaluation.
3.2.5 Establishing an Ad-Hoc Organization for
the Interaction
At some point of the interaction instantiation, the so-
cial engine of the initiator agent gathers a set of candi-
datures for every role defined in the RPI.Idiom proto-
col. Only one candidature is picked for a given role to
be part of an ad-hoc organization. The algorithm that
RPI.Social: Simple Enactment and Execution of First-Class Agent Interaction Protocols
97

Table 2: State transitions for an invited agent.
Transition Trigger Action
Invalid → Idle (0) The social engine is properly initialized None
Idle → Waiting
Approval (2)
Receive PROPOSE [initiator] {interaction
protocol identifier} and a role could be
played in the interaction
Send ACCEPT PROPOSAL [initiator]
{own candidature}
Waiting Approval
→ Idle (3)
Waiting for CONFIRM from the initiator
timeout is up
Send CANCEL [initiator]
Waiting Approval
(4)
Receive CONFIRM [initiator] {role players
list}
Send FAILURE [initiator] if the list is
unintelligible otherwise send INFORM
[role players] {own candidature} and
become a confirmed role player
Waiting Approval
(4)
Receive INFORM [role player] {sender’s
candidature}
Send FAILURE [role player] if the can-
didature is unintelligible
Waiting Approval
(4)
Receive FAILURE [role player] Send INFORM [role player] {own can-
didature}
Waiting Approval
→ Starting Inter-
action (5)
Receive CONFIRM [initiator] role players
list and all the role players are known to the
agent
Go to RPI.Social.Exec
Waiting Approval
→ Idle (3)
Receive CONFIRM [initiator] role players
list and all the role players are known to the
agent but the interaction could not be started
Send CANCEL [initiator]
Waiting Approval
→ Starting Inter-
action (5)
Receive INFORM [role player] {sender’s
candidature}, the agent is a confirmed role
player and all the other role players are
known to it
Go to RPI.Social.Exec
Waiting Approval
→ Idle (3)
Receive INFORM [role player] {sender’s
candidature}, the agent is a confirmed role
player and all the other role players are
known to it but the interaction could not be
started
Send CANCEL [initiator]
Waiting Approval
→ Idle (3)
Receive CANCEL [initiator] None
Waiting Approval
→ Idle (3)
An unrecoverable failure Send CANCEL [initiator]
Idle → Idle (1) Receive PROPOSE [initiator] {interaction
protocol identifier} and no role could be
played in the interaction
Send REJECT PROPOSAL [initiator]
achieves this attempts to find the first organization of
role players for which the precondition of interaction
protocol is true. In contrast to the first evaluation of
the precondition performed by the initiator, this one
does not accept unknown as a valid truth value since
all the role players are present.
4 RPI.Social.Exec: EXECUTION
OF INTERACTION
PROTOCOLS
Once the interaction is launched, RPI.Social.Exec
comes into action. This framework sub-system is re-
sponsible of the execution of the move specified in the
process template of the interaction protocol. Depend-
ing on the type of the move, its execution is treated as
follows:
• If the move is atomic, the role to which it is asso-
ciated executes it and passes the results to the rest
of the role players.
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
98

• If the move is a composition (and-con), its com-
ponent moves are executed recursively and con-
currently to the best of the agent’s ability.
• If the move is a composition (or), its selected
component moves (i.e. those which are possible)
are executed recursively and concurrently to the
best of the agent’s ability.
• If the move is a composition (xor), the unique se-
lected component move is executed recursively.
• If the move is a composition (and-seq), the com-
ponent moves are executed recursively one after
the other.
Upon the formation of the ad-hoc organization
for the interaction, the social engine of every role
player enters Starting Interaction transitional state. In
that state, the social engine pushes in the task queue
of its underlying agent a ProcessLauncherTask task
which navigates the interaction’s main process’s tree
to reach the first atomic move. If the reached move
is defined by one of the role player’s behaviour, the
latter pushes in its task queue an item to execute
the behaviour mapped to the move and immediately
switches to the Busy Interaction state (transition (7)
in Fig. 4 and Fig. 5), otherwise it switches to the
Idle Interaction state (transition (8) in Fig. 4 and Fig.
5). From that point on, the social engine alternates
between Busy Interaction and Idle Interaction states
which are essentially the RPI.Social.Exec states (tran-
sitions (9) to (12) in Fig. 4 and Fig. 5).
In the Busy Interaction state, when the agent runs
the move’s task, first, it evaluates the precondition of
the move; then, it executes it; after that it evaluates
the postcondition to detect if the execution was suc-
cessful; and eventually, it pushes in its queue a task
performs two operations:
• It sends to the rest of the organization an IN-
FORM message that holds the state of the run (i.e.
if it was done and whether it was successful or
not) and the values of the output.
• It emulates the execution of the move on its own
internal representation of the interaction.
In the Idle Interaction state, the social engine
expects INFORM messages from busy role players.
When one of those message is received, if the move
is done, the execution is emulated by plugging in the
output values and the state of the run is marked too.
At the end of each of the RPI.Social.Exec states,
the social engine executes ProcessLauncherTask task
again unless the root process that defines the whole
interaction protocol is marked as done. Fig. 6 depicts
the routine of task processing by RPI.Social.Exec.
5 RPI.Inference OVERVIEW
In RPI, agent goals, interaction protocols constraints
and axioms are represented using predicates. Goals
and constraints are logic expressions that contain only
atomic formulas or their negations applied only to
constant symbols, i.e. ground expressions. An axiom
is a rule with a head and a potential body, similar to a
Horn clause (Van Emden and Kowalski, 1976). How-
ever, axioms in RPI differ from Horn clauses with
these properties:
• the head of the rule could be a negative, on the
contrary, the head of the rule form of a Horn
clause is always the positive unless it is a goal
clause; and
• unlike a Horn clause, an axiom in RPI may con-
tain more than one positive atomic formula.
Based on these two properties, in contrast to Horn
clauses, there is more than one way to express an ax-
iom as a rule. In fact, each of the literals in the axiom
could be placed as head to the rule.
5.1 Main Rule and Interpretations of an
Axiom
The main rule of an axiom is the one that explicitly
defines it in RPI.Idiom. An interpretation of an ax-
iom, on the other hand, is any rule derived from its
main one.
For example, if the main rule is:
p(X, Y) :- ¬r(Y), s(X, Y).
where p is the head of the rule; then, the interpreta-
tions will be the following:
r(X) :- ¬p(X, Y), s(X, Y).
¬s(X, Y) :- ¬r(Y), ¬p(X, Y).
In RPI, there are two distinct operations that are
performed on logic expressions:
• evaluation of ground expressions; and
• proving entailment relations among ground ex-
pressions.
The unit of RPI responsible for providing these two
operations is RPI.Inference.
In some cases, the information needed for the
evaluation of a precondition is incomplete. There are
two approaches to deal with this case: default to ei-
ther truth values false or unknown. In the former ap-
proach the world is assumed to be closed while in the
latter the world is assumed to be open. In a closed
world, e.g. in a Prolog program, anything that can’t
RPI.Social: Simple Enactment and Execution of First-Class Agent Interaction Protocols
99
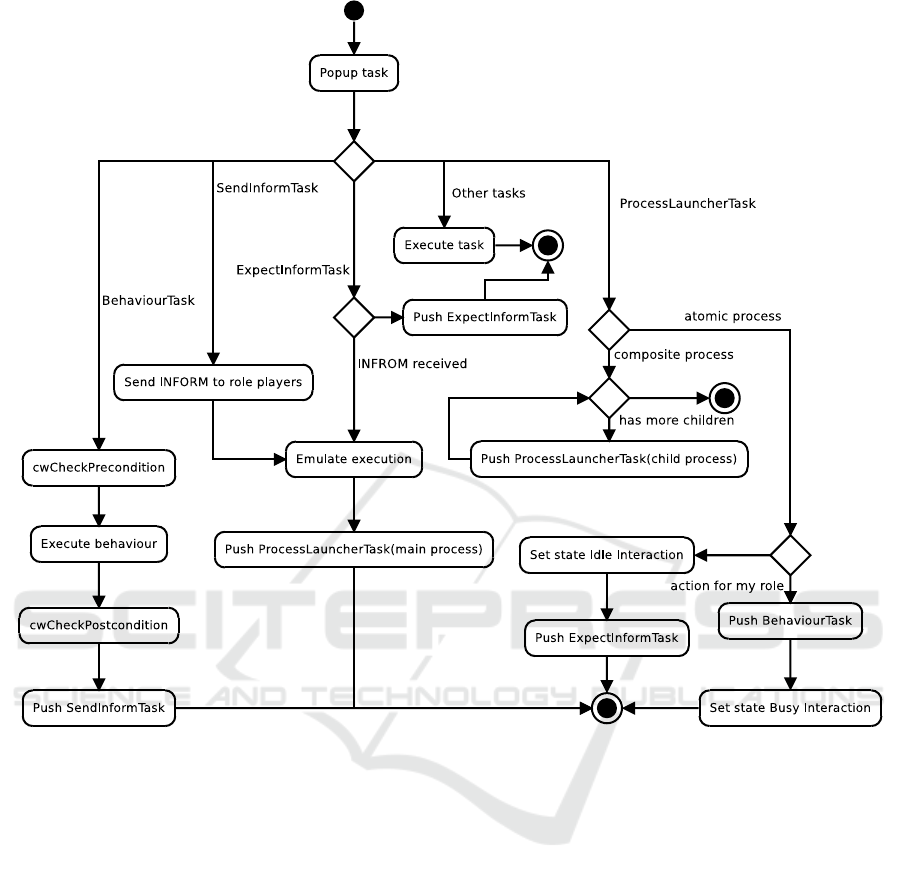
Figure 6: Activity diagram for processing tasks in RPI.Social.Exec.
be inferred from the system is automatically false. By
contrast, in an open world, the system acknowledges
the lack of the necessary information to know the ve-
racity of a queried truth value and attributes to it the
unknown value. In order to operate in an open world,
RPI adopts Kleene’s logic (Kleene, 1938) which is a
ternary logic that recognizes a third truth value for the
indeterminate.
The evaluation of expressions is procedural like
a function call, i.e. the values of the arguments are
passed to the predicates and the whole expression is
evaluated for a truth value. If, for a given predicate,
any of the arguments is unknownat the moment of the
evaluation, that predicate’s truth value is unknown.
The system for proving entailment is built on top
of Prolog. The left side of the entailment is the
first ground expression plus the set of axioms defined
in the interaction protocol’s RPI.Idiom specification,
while its right side is the second ground expression.
In RPI.Inference, we label the first and second expres-
sions facts and crossfacts, respectively. The basic idea
is to generate a Prolog program with the axioms and
the facts. Then, the generated program is queried for
individual literals in the crossfacts. If a query does not
return true, a second one is launched with the nega-
tion of the same literal. If that second query does not
return true as well, the truth value of the literal will be
unknown, otherwise it will be false.
6 RELATED WORKS
The previous work (Nouri et al., 2015) argues that
the works on first-class interaction protocols that
are close to RPI.Idiom are the ARIP model (Khal-
faoui and Chaari, 2013), the RASA language (Miller
and McBurney, 2007) and the commitment machines
(Yolum and Singh, 2002). We extend the comparison
between these approaches to implementing first-class
agent protocols and RPI to cover RPI.Social as well.
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
100

While RASA protocols are claimed to be exe-
cutable, there is no explicit mechanism that specifies
how to achieve that, thus this approach is eliminated
from the comparison. ARIP model on the other hand
relies on a third party language for implementing
component interaction to specify actual agent proto-
col. While ARIP interaction protocols are executable
as component interactions, the model is limited to the
discovery and the instantiation of the protocols and
has not any form of control over the flow of their ex-
ecution. This is equivalent to having only the same
functionalities provided by RPI.Social.IoP.
Considering the OWL-P ontology language (De-
sai et al., 2006) as a representative work for the
commitment machines, its interaction protocols are
compiled into Jess rules which then could be exe-
cuted on demand. The execution of the interaction
protocols in OWL-P seems to be comparable with
RPI.Social.Exec. However, the initiation of a proto-
col is slightly different from RPI.Social.IoP. In fact,
agents that wish to interact will have to pick their pro-
tocols from a repository with the possibility to com-
pose them if needed. Then, the agent enacts one of the
roles in interaction protocols and register itself as a
service provider for the interaction. An initiator agent
would seek a service provider and ask for the descrip-
tion of its role which is subsequently enacted for the
span of the interaction.
XRole (Cabri et al., 2002) is an XML notation for
roles in the BRAIN framework (Cabri et al., 2003).
The interaction protocols in BRAIN are supported by
XRole where each role has a set of actions that trig-
ger events and a set of events that it listens to. The
mediator, called the interaction infrastructure, is the
part of the environment that generates events from
the actions performed. RoleX (Cabri et al., 2004)
is the part of BRAIN that dynamically enacts roles
by agents. To this extent, RoleX covers a subset of
RPI.Social.IoP functionalities since agents in RPI as-
sume roles only for an imminent interaction. The me-
diator in BRAIN plays the role of an event bus that
dispatches events to roles listening to them. There-
fore, in BRAIN a third party entity coordinates be-
tween the interacting agents. The same functionality
is covered by RPI.Social.Exec on an agent level.
In (Dastani et al., 2005), the authors introduce
the concept of role enactment. The agent has four
operators for assuming the role, playing it and for
the opposite of these two operations, which makes
them respectively enact, activate, deact and deacti-
vate. While this proposition shares a common ground
with RPI.Social.IoP, it has a strong organizational
component that implies norms and restrictions on the
model for implementing first-class interaction.
7 CONCLUSION
The RPI framework provides the tools necessary for
the multiagent system developer to design and imple-
ment first-class interaction protocols that could be au-
tonomously instantiated by the agents in runtime. The
framework has a modular design in which loosely-
coupled responsibilities within its ecosystem are as-
signed to different sub-systems.
Our contribution in this paper, is the introduc-
tion of RPI.Social which is the sub-system of the
RPI framework that performs all the social behaviours
of the agent on its behalf. It consists of two
units. The first, RPI.Social.IoP, takes care of initi-
ating interaction protocols and responding to invita-
tions to play roles in others. The second unit which
RPI.Social.Exec is responsible for the execution of
the interaction and the coordination between the role
players. The paper gives an overview on RPI.Idiom
and RPI.Inference on which RPI.Social depends.
The literature on the execution of first-class agent
protocols is very rare due to the relative scarcity of
works on the implementation of reified protocols. Ac-
cordingly, assessing the relevance of the contribution
of RPI.Social was made in comparison to some of the
few works on the implementation of first-class inter-
actions that explained their mechanisms for running
their interaction protocols.
RPI.Social has the limitation of not being fully
fault-tolerant. The bootstrap protocol defined by
RPI.Social.IoP is made to be tolerant to the unavail-
ability of agents during the negotiations for establish-
ing an ad-hoc organization for the interaction. How-
ever, RPI.Social.Exec would not recover from events
such as the sudden absence of an interacting agent.
In our future works we intend to add the support
for fault tolerance to RPI.Social to overcome its limi-
tation. Besides, we will focus on detailing the contri-
bution of RPI.Inference and RPI.Library.
REFERENCES
Bauer, B., Muller, J. P., and Odell, J. (2000). An exten-
sion of UML by protocols for multi-agent interaction.
In Proceedings of the Fourth International Conference
on MultiAgent Systems, pages 207–214. IEEE.
Cabri, G., Ferrari, L., and Leonardi, L. (2004). The
RoleX environment for multi-agent cooperation. In
Cooperative Information Agents VIII, pages 257–270.
Springer.
Cabri, G., Leonardi, L., and Zambonelli, F. (2002). XRole:
XML roles for agent interaction. In Proceedings of
the 3rd International Symposium ”From Agent The-
ory to Agent Implementation”, at the 16th European
RPI.Social: Simple Enactment and Execution of First-Class Agent Interaction Protocols
101

Meeting on Cybernetics and Systems Research (EM-
CSR 2002), Wien.
Cabri, G., Leonardi, L., and Zambonelli, F. (2003). BRAIN:
a framework for flexible role-based interactions in
multiagent systems. In On The Move to Meaningful
Internet Systems 2003: CoopIS, DOA, and ODBASE,
pages 145–161. Springer.
Dastani, M., van Riemsdijk, M. B., Hulstijn, J., Dignum,
F., and Meyer, J.-J. C. (2005). Enacting and Deact-
ing Roles in Agent Programming. In Proceedings of
the 5th International Conference on Agent-Oriented
Software Engineering, AOSE’04, pages 189–204.
Springer.
Desai, N., Mallya, A. U., Chopra, A. K., and Singh, M. P.
(2006). OWL-P: a methodology for business process
development. In Agent-Oriented Information Systems
III, pages 79–94. Springer.
Jensen, A. S. (2015). The AORTA Reasoning Framework-
Adding Organizational Reasoning to Agents. PhD the-
sis, Department of Applied Mathematics and Com-
puter Science, Algorithms and Logic, Department
of Applied Mathematics and Computer Science, De-
partment of Informatics and Mathematical Modeling,
Technical University of Denmark.
Khalfaoui, S. and Chaari, W. L. (2013). Automatic Reuse
of Interaction Protocols in MAS: ARIP Model. In
Advanced Methods and Technologies for Agent and
Multi-Agent Systems, Proceedings of the 7th KES
Conference on Agent and Multi-Agent Systems - Tech-
nologies and Applications (KES-AMSTA 2013), pages
315–324. IOS Press.
Kleene, S. C. (1938). On notation for ordinal numbers. The
Journal of Symbolic Logic, 3(04):150–155.
Miller, T. and McBurney, P. (2007). Using constraints and
process algebra for specification of first-class agent in-
teraction protocols. In Engineering Societies in the
Agents World VII, pages 245–264. Springer.
Morales, J., Wooldridge, M., Rodr´ıguez-Aguilar, J. A., and
L´opez-S´anchez, M. (2017). Evolutionary Synthesis
of Stable Normative Systems. In Proceedings of the
16th Conference on Autonomous Agents and MultiA-
gent Systems, AAMAS ’17, pages 1646–1648, Rich-
land, SC. International Foundation for Autonomous
Agents and Multiagent Systems.
Nouri, A., Chaari, W. L., and Ghedira, K. (2015).
RPI.Idiom: A high-level language for first-class agent
interaction protocols. In Computer Systems and Appli-
cations (AICCSA), 2015 IEEE/ACS12th International
Conference of, pages 1–8. IEEE.
Shoham, Y. and Leyton-Brown, K. (2008). Multiagent
Systems: Algorithmic, Game-Theoretic, and Logical
Foundations. Cambridge University Press, New York,
NY, USA.
Van Emden, M. H. and Kowalski, R. A. (1976). The Seman-
tics of Predicate Logic As a Programming Language.
Journal of the ACM, 23(4):733–742.
Yolum, P. and Singh, M. P. (2002). Commitment machines.
In Intelligent Agents VIII, pages 235–247. Springer.
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
102
