
Face Spoofing Detection for Smartphones using a 3D Reconstruction and
the Motion Sensors
∗
Kim Trong Nguyen
1
, Cathel Zitzmann
2
, Florent Retraint
3
, Agn
`
es Delahaies
4
,
Fr
´
ed
´
eric Morain-Nicolier
4
and Hoai Phuong Nguyen
4
1
EPF Graduate School of Engineering, Troyes, France
2
EPF Graduate School of Engineering, Montpellier, France
3
LM2S - ICD - Troyes University of Technology, Troyes, France
4
CREsTIC, University of Reims Champagne-Ardenne, Reims, France
Keywords:
Digital Forensics, Spoofing Attack, 3D Reconstruction, Facial Recognition, Motion Sensors.
Abstract:
Face recognition system is proven to be vulnerable to face spoofing attack. Many approaches have been
proposed in the literature to resolve this vulnerability. This paper proposes a novel method dedicated to
mobile systems. The approach asks users to capture a video by moving the device around their face. Thanks
to a 3D reconstruction process, the shape of the object is estimated from the video. By evaluating this 3D
shape, we can rapidly eliminate attacks in which a photo of a legitimate face is used. Then, the camera’s poses
estimated from the 3D reconstruction is used to be compared to the data captured from the device’s motion
sensors. Experimental results on a real database show the efficiency of the proposed approach.
1 INTRODUCTION
Authentication by facial recognition can be exploited
as an additional solution to reinforce the security level
of our information systems. However, it is proven that
this solution is vulnerable. Facial recognition is eas-
ily compromised by face spoofing attacks. Therefore,
photos and video widely shared on social networks
may become a weapon against their owner’s security.
Attackers have many ways to attack a facial recog-
nition system. They can utilize a photo of legitimate
user printed on a piece of paper or displayed on an
LCD screen and present it in front of the camera in
operation. They can also replay a video which filmed
the victim previously or just use a 3D mask to mislead
the face detection process.
In 3D-mask attack, attackers have to focus on their
target and do firstly manage to construct a 3D mask
or maybe a sculpture of the target. If the mask is
constructed perfectly, there is less chance to detect
it. However, the achievement of this type of attack
is quite difficult and expensive. In this paper, the pro-
posed method seeks to detect basically the photo and
video-replay attacks.
∗
This work is funded by Troyes Champagne Metropole.
2 RELATED WORKS
Many approaches have been proposed in the litera-
ture to deal with face spoofing attacks using different
features like texture, liveliness, structure, etc. Tex-
tural information, which manages to be different be-
tween real-face images and fake ones, can be ex-
ploited for face spoofing detection. From a single
image, in (Maatta et al., 2011), the authors propose
to analyze the texture of facial images using multi-
scale Local Binary Pattern (LBP). In the same spirit,
Kim et al. (Kim et al., 2012), also utilized LBP,
but in fusion with frequency analyses by using the
power spectrum. Other researchers exploited the Lo-
cal Graph Structure (LGS) (Housam et al., 2014) or
its improved versions (ILGS, SLGS) (Abdullah et al.,
2014), (Bashier et al., 2014) as texture descriptors to
conceptualize their face spoofing detection method.
Another method (Nguyen et al., 2016) proposes to ex-
ploit the statistic behavior of the distribution of noises
local variances to detect face spoofing attacks.
Some approaches manage to distinguish real faces
from spoofed faces by seeking proofs of liveness from
a sequence of images or from a video capturing the
face. Kollreider et al. (Kollreider et al., 2007) pro-
posed an approach in which lip movements are ex-
286
Nguyen, K., Zitzmann, C., Retraint, F., Delahaies, A., Morain-Nicolier, F. and Nguyen, H.
Face Spoofing Detection for Smartphones using a 3D Reconstruction and the Motion Sensors.
DOI: 10.5220/0006602202860291
In Proceedings of the 4th International Conference on Information Systems Security and Privacy (ICISSP 2018), pages 286-291
ISBN: 978-989-758-282-0
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ploited for face spoofing detection while the user is
asked to speak some numerical digits. Huyng-Kean
Jee et al. (Hyung-Keun et al., 2006), in their ap-
proach, proposed to study uncontrollable movements
of eyes regions, such as eye blinking or pupil move-
ment. Following the same idea, Lin Sun et al. (Sun
et al., 2007) also proposed to exploit eyes movements
by modeling and detecting the two principal states of
the eyes: opened-state and closed-state.
Some other methods exploit the differences be-
tween 2D objects and a 3D face in their structure,
their moving features or the depth information that
they provide. For instance, Kim et al. (Kim et al.,
2013) proposed to compare images captured in dif-
ferent focusing. For a 3D object, due to depth infor-
mation, the difference between images of different fo-
cusing will be clearer than the one in the case of 2D
objects. The approach permits to identify efficiently
spoofing attacks using a 2D display support. Studying
the difference in the behavior of optical flows gener-
ated by 2D spoofed face and real face have been also
envisaged (Bao et al., 2009).
TODO more related works
3 PROPOSED APPROACH
In the last few years, we can remark a constant evo-
lution of mobile technology and of the smartphone
market. More and more people use smartphones to
ease their daily life as well as their professional ac-
tivities. Myriad mobile applications require or have
access to personal or private information of users.
Therefore, they need a high level of security. Authen-
tication by facial recognition is proposed as a solution
to reinforce the security of mobile systems. However,
the problem of face spoofing is always unavoidable.
Actual solutions are quite relevant and optimized to
settle this problem, but just in some provided cases
study. Thus, an efficient solution dedicated to smart-
phone system is indispensable.
In the case of a smartphone system, which is mo-
bile, images or videos could be captured under differ-
ent conditions of lighting, under different orientations
and with an uncontrollable background. The quality
of acquisition could also be affected by the movement
of the camera and the movement relative of the con-
text where situated the acquisition system (e.g. when
a user authenticates while he is traveling in a train).
In addition, the diversity and the constant evolution
of smartphone models, as well as the difficulty in cal-
ibrating their cameras, are also among the big barriers
for an efficient face spoofing detection solution.
However, the presence of different sensors inte-
grated into a smartphone may be an advantage which
allows us to develop a novel dedicated solution to face
spoofing detection. Indeed, with the help of the move-
ment sensors and the multitasking ability of smart-
phones, we can simultaneously capture the device’s
movement information while filming the user’s face
by our Android Application. (Notice that all smart-
phones in our day include at least the gyroscope sen-
sor.) At the end of this phase, the output will include
a video of the head and sensors raw data. In the case
of legit authentication, information given by move-
ment sensors is a priori coherent with information es-
timated from camera’s outputs, but it is generally not
the same case when a spoofing attack happens. There-
fore, it is a good idea to exploit the coherence be-
tween these two sources of information as features for
face spoofing detection. Our proposed solution relies
mainly on this idea.
Figure 1: Flowchart of the whole proposed detection pro-
cess.
The proposed solution consists of three major
steps. Figure 1 shows the detection flowchart of the
solution. Firstly, a 3D model of the face is estimated
thanks to a 3D reconstruction process, section 3.1.
Then, a Photo Attack Detection (PAD) classifier ex-
ploiting the 3D shape is employed to retrieve photo
attacks (which use a static image of legitimate user,
e.g. photo printed on paper or displayed on an LCD
screen). The construction of PAD classifier is de-
scribed in the section 3.2. For the ones which pass
through the PAD classifier, they will be after that clas-
sified thanks to the Video Attack Detection (VAD)
classifier, described in the section 3.3. The VAD clas-
sifier permits to detect video-replay attacks. The ones
which finally pass through the VAD classifier would
be considered as legitimate authentications.
Figure 2: Camera movements during authentication pro-
cess.
Apart from the necessary movement of smart-
phone (Figure 2) which requires the collaboration of
Face Spoofing Detection for Smartphones using a 3D Reconstruction and the Motion Sensors
287
user, all other process can be automatic. In this study,
the video and sensors data collector, 3D reconstructor
and classifier are regrouped inside a unique android
application. However, the 3D reconstruction is not
real-time yet that slows down the detection. In a real
scenario, it is recommended to offshore 3D recon-
struction and final classification to a dedicated server.
3.1 Facial 3D Reconstruction
In the process of proposed method, a three-
dimensional model of the object (e.g. real face or fake
face) is constructed from a video captured during the
authentication process. For a better quality of the 3D
model, the user is asked to move the phone’s camera
around their face in such a way as various head poses
can be captured in the video. Two simple camera
movements are considered in our proposed approach:
in the vertical direction (i.e. upwards or downwards)
and in the horizontal direction (i.e. to the left or to the
right) (Figure 2). These proposed basic movements
allow applications to easily communicate with users
during authentication. They also permit to simplify
the measure of coherence mentioned above.
In our study, 3D reconstruction process is assured
by VisualSFM, a 3D reconstruction application devel-
oped by C. Wu (Wu, 2013) using Structure From Mo-
tion (SFM). The method requires a sequence of im-
ages in input. It gives as outputs the 3D reconstruction
of the object captured as well as information related to
the camera poses. Other recent solutions can replace
VisualSFM in this step such as a faster 3D reconstruc-
tion proposed by Maninchedda et al. (Maninchedda
et al., 2016). The choice of technology here does not
affect the final outcome severely but highly depends
on the computation capacity of smartphone.
The 3D model is a matrix which represents a
cluster of featured points in a Cartesian coordinate
system. Notes M the 3D model , it can be represented
as:
M =
x
1
y
1
z
1
x
2
y
2
z
2
... ... ...
x
N
y
N
z
N
(1)
where N is the number of feature points and
(x
k
, y
k
, z
k
) (k = 1, ..., N) are the coordinates of the k-
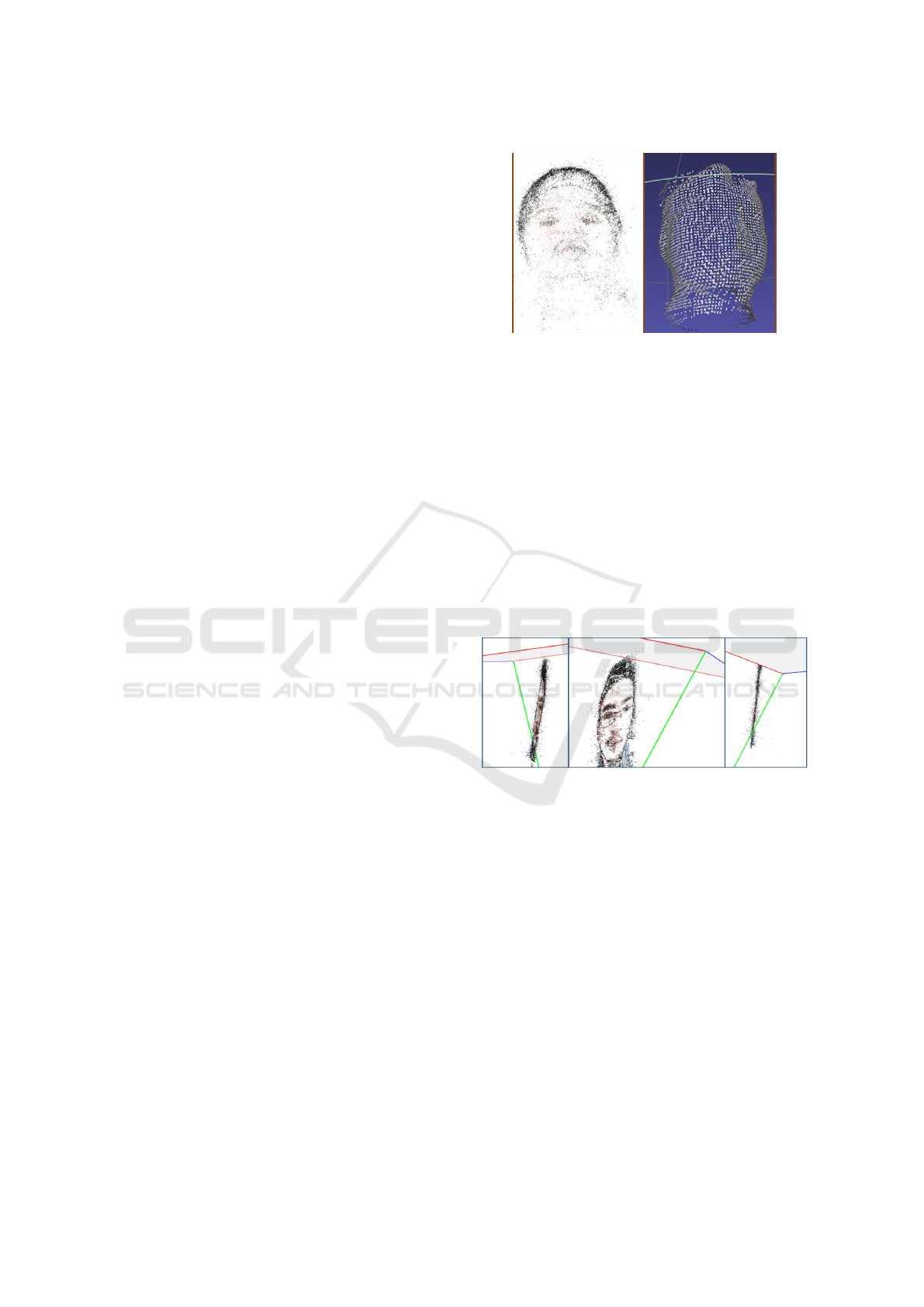
th point in the space Oxyz. Figure 3 gives an example
of a real face reconstructed in form of points cloud.
The geometric information of i-th frame (i =
1, .., n) is also calculated and represent in position ma-
trix: P
i
and orientation matrix θ
i
) ¶
i
=
x y z
and θ
i
=
θ
x
θ
y
θ
z
where (x,y,z) is the coor-
dination of the camera when it captured i-th frame
Figure 3: Points cloud of a real face 3D model.
(θ
x
, θ
y
, θ
z
) is its orientation respectively in the view
of Ox, Oy and Oz.
3.2 Photo Attack Detection
In the case of photo attacks, the 3D reconstruction
given by SFM method is clearly different from the
one given in the case of a real face. Figure 4 shows
different views of the 3D reconstruction of a printed
face. It is easy to realize that the form of the 3D re-
construction is flattering in the case of photo attack.
It can be explained by the fact that a real face is a real
3D object which contains much more depth informa-
tion than a face printed on a piece of paper.
Figure 4: Different views of a printed face 3D model.
Thus, the more a 3D model is flat, the higher pos-
sibility of a photo attack. So that we can base on the
thickness of the 3D reconstruction to eliminate photo
attacks.
The thickness of 3D reconstruction can be rela-
tivity estimated using Principal Component Analy-
sis (PCA). The PCA technique permits to transform
the 3D reconstruction into a new coordinate system
(w = (w
(1)
, w
(2)
, w
(3)
)), where each coordinate is rep-
resented by a principal component. This transforma-
tion is defined in such a way that the first principal
component (w
(1)
) has the largest possible variance
(i.e. it accounts for as much of the variability in the
data as possible), and each succeeding component, in
turn, has the highest variance possible under the con-
straint that it is orthogonal to the preceding compo-
nents. In that way, the variance of point cloud pro-
jected in the last component is the minimum among
ICISSP 2018 - 4th International Conference on Information Systems Security and Privacy
288

all vectors of space that can be used to represent the
”thickness”.
For a simplicity of the PCA transformation, the
columns of the matrix M are firstly shifted to have a
zero-mean. Without ambiguity, we use the same term
M as the matrix shifted for the following develop-
ment. The principal components matrix P is defined
as an orthogonal linear transformation of the matrix
M:
P = MW (2)
where the matrix W is a 3-by-3 matrix whose columns
are the eigenvectors of M
T
M.
Denotes v
j
the variance of the i-th column of P
( j = 1, 2, 3). The order of magnitude of each column,
denotes d
i
, is given as follows:
d
i
=
v
i
v
1
+ v
2
+ v
3
(3)
For a face spoofing attack, the points of the 3D
reconstruction is in a plan. Therefore, there is almost
no information in the third component that makes d
3
very tiny. Meanwhile, for a real face, the thickness
play a significant part in the total information. Figure
5 (a) and (b) give an illustration of the three principal
components obtained respectively from fake and real
face 3D models.
(a) (b)
Figure 5: PCA of real (a) and fake (b) face 3D reconstruc-
tion.
The different is so net that a simple SVM classifier
fed by the order of magnitude d
i
can be employed as
a PAD classifier without any other processing.
3.3 Video Attack Detection
In the scenario of a video attack, a clip of authentic
user’s head is displayed in a LCD screen in front of
the camera. The video is edited so that the head moves
in the same way to mimic the process. This attack can
pass the PAD classifier since the moving head can
provide different views of user’s face to construct a
genuine 3D model of the head. The form of the 3D re-
construction does not give us enough information for
spoofing detection. Therefore, we proposed to study,
in addition, the camera poses.
In fact, the movement of the camera can be ob-
served in two ways. The first is the positions and the
poses of camera corresponding to each image. These
positions which represent the movement of the cam-
era according to the user’s face can be located by 3D
reconstruction. Figure 6 shows an example of the
camera positions estimated from the 3D reconstruc-
tion.
Figure 6: Example of the camera positions estimated from
the 3D reconstruction. Direction of the camera move is
marked form 1 to 8.
The 3D reconstruction describes the movement
by position vectors P
i
for the camera position and
by orientation vectors θ
i
for the camera poses with
i = 1, .., n is the index of the frame. Since the move-
ment is mono-direction (the camera move by x-axis,
y-axis but not both at the same time), the position and
orientation can be represented separately axis by axis
in the form of sequence:
X
i
= P
i,x
(4)
θ
x
i
= θ
i,x
(5)
The second observation is the trajectory of camera
captured by movement sensors (e.g. accelerometer,
gyroscope). These sensors observe the acceleration of
translation and rotation of camera continuously by the
time that allows to describe that movement indepen-
dently. The gyroscope captures rotation acceleration
and the accelerometer captures linear acceleration of
the device affected by the force of gravity.
d
2
x(t)
dx
2
= a
x
(t) (6)
d
2
θ
x
(t)
dx
2
= g
x
(t) (7)
Where t ∈ R
+
is the index of time, g
x
, g
y
, g
z
are data
from gyroscope and a
x
, a
y
, a
z
are data from accelera-
tion.
Face Spoofing Detection for Smartphones using a 3D Reconstruction and the Motion Sensors
289

By using integration method, the position and ori-
entation of thecamera can be calculated from the ac-
celeration as the initial speed and initial position are
both zeros. Let’s t
max
is the length of video, one frame
is taken each ∆t =
t
max
n−1
second. Another sequence of
the camera state can be obtained from the sensor data:
b
X
i
= x(t
i
) (8)
b
θ
x
i
= θ
x
(t
i
) (9)
where i = 1, .., n, t
1
= 0, t
n
= t
max
, t
i
= ∆t.(i − 1)
Figure 7: Correlations between θ
x
i
(black)and
b
θ
x
i
(red) and
between θ
y
i
(black) and
b
θ
y
i
(red).
The camera poses are compared to the information
captured from movement sensors (e.g. accelerome-
ter, gyroscope). Both information sources (3D recon-
struction and movement sensors) represent the move-
ment of the camera according to the user’s face. Thus,
for a legit authentication case, there will be, a priori,
a high similarity between these two sources. Mean-
while, when attackers use a video to authenticate, the
camera poses estimated from the camera output will
not represent the real poses of the camera. Therefore,
the similarity between the two sources would not be
assured. To estimate this similarity, a simple correla-
tion can be applied for each couple of data as: (θ
x
i
,
b
θ
x
i
),
(θ
y
i
,
b
θ
y
i
), (X
i
,
b
X
i
) and (Y
i
,
b
Y
i
). All these features (correla-
tion results) are fed to an SVM classifier to form the
VAD classifier mentioned previously.
4 EXPERIMENTAL RESULTS
The proposed video-replay attack detection process
requires the data of motion sensors integrated within
the smartphone. Actually, there are no public face
spoofing datasets responding to this requirement.
Therefore, we tested the proposed method in a spe-
cific database constructed in our laboratory.
The database includes 201 videos of 3 people in-
cluding sensor data, therein: 99 cases of legitimate
authentication, 63 cases of video-replay attack and 39
cases of photo attack.
The videos are captured in different light condi-
tions and movement speed by three devices: 2 in-
stances of Samsung Galaxy Alpha and a Samsung
Galaxy Tab.
The database is divided into 2 sets. Each set has
all three types of videos (legitimate, photo-attack and
video-replay attack authentication). One set is used
for training the PAD and VAD classifiers and the other
set is used for testing. From the training set, we used
just legitimate and photo attack authentication videos
to train the PAD classifier and accordingly we used
just legitimate and video-replay attack authentication
videos to train the VAD one.
We also implemented the multi-scale Local Bi-
nary Pattern method (Maatta et al., 2011), which ap-
plies for a single image. Therefore, frames from the
videos are used as input to implement this method.
Figure 8 shows the Receiver Operating Character-
istics (ROC) curves of the proposed method and the
LBP one. Our method performs much better than the
LBP one especially for a small rate of false positive.
Figure 8: ROC curve for the proposed detection method in
comparison with the one of LBP method.
5 CONCLUSION
In this paper, we propose a novel approach dedicated
to mobile systems against the face spoofing detection
problems. Our proposed approach is based on the 3D
reconstruction form of face images to detect a photo
attack. The detection of video attacks is based on
the coherence between the movements captured by
the smartphone sensors and the camera position es-
timated from 3D reconstruction.
Experimental results show that the approach elim-
inates attacks using a printed image efficiently. For
video face spoofing attacks, the approach can still
reach a high performance.
The 3D reconstruction process, which is realized
ICISSP 2018 - 4th International Conference on Information Systems Security and Privacy
290

with the help of the SFM method, needs a high com-
putational cost. For future work, an improvement of
this one will be envisaged. We plan to develop a
real-time lightweight 3D reconstruction method ded-
icated to our face spoofing detection approach. We
also think about a new strategy for frame selection in
the 3D reconstruction process to reduce the computa-
tion time.
REFERENCES
Abdullah, M., Sayeed, M., Sonai Muthu, K., Bashier, H.,
Azman, A., and Ibrahim, S. (oct. 2014). Face recog-
nition with symmetric local graph structure (SLGS).
Expert Systems with Applications, 41(14):6131–6137.
Bao, W., Li, H., Li, N., and Jiang, W. (avr. 2009). A live-
ness detection method for face recognition based on
optical flow field. In International Conference on Im-
age Analysis and Signal Processing, pages 233–236.
Bashier, H., Lau, S., Han, P., Ping, L., and Li, C. (2014).
Face spoofing detection using local graph structure.
In Proceedings of the 2014 International Conference
on Computer, Communications and Information Tech-
nology.
Housam, K., Lau, S., Pang, Y., Liew, Y., and Chiang,
M. (2014). Face spoofing detection based on im-
proved local graph structure. In 2014 International
Conference on Information Science and Applications
(ICISA), pages 1–4.
Hyung-Keun, J., Sung-Uk, J., and Jang-Hee, Y. (2006).
Liveness detection for embedded face recognition sys-
tem. International Journal of Biological and Medical
Sciences.
Kim, G., Eum, S., Suhr, J., Kim, D., Park, K., and Kim, J.
(mar. 2012). Face liveness detection based on texture
and frequency analyses. In 2012 5th IAPR Interna-
tional Conference on Biometrics (ICB), pages 67–72.
Kim, S., Yu, S., Kim, K., Ban, Y., and Lee, S. (jun. 2013).
Face liveness detection using variable focusing. In
2013 International Conference on Biometrics (ICB),
pages 1–6.
Kollreider, K., Fronthaler, H., Faraj, M. I., and Bigun, J.
(sep. 2007). Real-time face detection and motion anal-
ysis with application in liveness assessment. Trans.
Info. For. Sec., 2(3):548–558.
Maatta, J., Hadid, A., and Pietikainen, M. (oct. 2011). Face
spoofing detection from single images using micro-
texture analysis. In 2011 International Joint Confer-
ence on Biometrics (IJCB), pages 1–7.
Maninchedda, F., Hne, C., Oswald, M. R., and Pollefeys,
M. (2016). Face Reconstruction on Mobile Devices
Using a Height Map Shape Model and Fast Regular-
ization. In 2016 Fourth International Conference on
3D Vision (3DV), pages 489–498.
Nguyen, H. P., Retrainty, F., Morain-Nicolier, F., and Dela-
haies, A. (2016). Face spoofing attack detection based
on the behavior of noises. In 2016 IEEE Global Con-
ference on Signal and Information Processing, Glob-
alSIP 2016, December 79, Greater Washington, D.C.,
USA, 2016, pages 1–5.
Sun, L., Pan, G., Wu, Z., and Lao, S. (2007). Blinking-
based live face detection using conditional random
fields. In Proceedings of the 2007 International Con-
ference on Advances in Biometrics, ICB’07, pages
252–260. Springer-Verlag.
Wu, C. (2013). Towards linear-time incremental structure
from motion. In Proceedings of the 2013 International
Conference on 3D Vision, 3DV ’13, pages 127–134.
IEEE Computer Society.
Face Spoofing Detection for Smartphones using a 3D Reconstruction and the Motion Sensors
291
