
Energy-aware Scheme for Animal Recognition in Wireless Acoustic
Sensor Networks
Afnan Algobail, Adel Soudani and Saad Alahmadi
Department of Computer Science, College of Computer and Information Science, King Saud University,
Riyadh, Saudi Arabia
Keywords: WASN, Object Recognition, Acoustic Sensing, Feature Extraction, Low-power Recognition.
Abstract: Wireless Acoustic Sensor Networks (WASN) have drawn tremendous attention due to their promising
potential audio-rich applications such as battlefield surveillance, environment monitoring, and ambient
intelligence. In this context, designing an approach for target recognition using sensed audio data represents
a very attractive solution that offers a wide range of deployment opportunities. However, this approach
faces the limited resource’s availability in the wireless sensor. The power consumption is considered to be
the major concern for large data transmission and extensive processing. Thus, the design of successful audio
based solution for target recognition should consider a trade-off between application efficiency and sensor
capabilities. The main contribution of this paper is to design a low-power scheme for target detection and
recognition based on acoustic signal. This scheme, using features extraction, is intended to locally detect a
specific target and to notify a remote server with low energy consumption. This paper details the
specification of the proposed scheme and explores its performances for low-power target recognition. The
results showed the hypothesis' validity, and demonstrate that the proposed approach can produce
classifications as accurate as 96.88% at a very low computational cost.
1 INTRODUCTION
Biodiversity, protection and conservation of
ecosystems are a worldwide concern. Thus,
developing an automated monitoring strategy for
animal recognition and tracking is highly demanded.
In this context, since animals are more often heard
rather than seen, acoustic surveying offer a more
efficient solution for monitoring animals. Compared
to traditional methods, wireless sensors can provide
a cost-effective solution to record acoustic data
across larger spatiotemporal scales. The recorded
acoustic signal provides a rich source of information
for context awareness. However, unlike traditional
scalar sensors, acoustic sensors generate large
volumes of data at relatively high sampling rates,
resulting in a large increase in energy consumption
when the full-recorded signal is transmitted to a
remote server. An extensive transmission of the
entire raw audio signal might question the lifetime
of the communication system.
One of the interesting ideas to reduce the volume
of data is to locally detect and recognize a particular
target using the extracted acoustic signature from the
received audio signal. The remote server will be then
informed using small size notification packets. This
scheme can significantly contribute to decrease the
number of required data transmissions, and
consequently leads to overall improvement in the
network lifetime. However, the success of such
scheme in achieving the desired results depends on
its ability to process the acoustic signal at low-cost
in acoustic motes within limited resources and
capabilities.
In this paper, we focus on the specification of a
low-complexity acoustic sensing scheme for target
recognition using two feature extraction methods:
Zero-Crossing Rate (ZCR) and Root Mean Square
(RMS). A Minimum Mean Distance (MMD)
classifier is used for the recognition. Our main
objective is to demonstrate the trade-off between
power consumption and recognition accuracy.
2 RELATED WORKS
Recognition of animals by their sounds has
motivated many research efforts. Han et al. (Han,
Algobail, A., Soudani, A. and Alahmadi, S.
Energy-aware Scheme for Animal Recognition in Wireless Acoustic Sensor Networks.
DOI: 10.5220/0006604100310038
In Proceedings of the 7th International Conference on Sensor Networks (SENSORNETS 2018), pages 31-38
ISBN: 978-989-758-284-4
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
31

Muniandy and Dayou, 2011) extracted spectral
centroid, Shannon entropy, and Re
́
nyi entropy
features. They used k-Nearest Neighbour (k-NN)
classifier to recognize nine frog species gaining just
a 75.6% accuracy. Wavelet transform was combined
with Mel-Cepstral Fourier Coefficients (MFCCs) in
(Colonna et al., 2012) to classifiy nine species of
anuran using k-NN classifier, whereas Xie (Xie et
al., 2015) used perceptual wavelet packet
decomposition sub-band cepstral coefficients for
identifying ten frog species. All the previous works
used wavelet analysis approach due to its ability to
achieve a high accuracy rate compared to time and
frequency domain features. However, these schemes
are very demanding both in computational power
and buffer size.
Among all mentioned features, MFCC feature set
has been widely used because it provides more
powerful discrimination capability. The authors in
(Evangelista et al., 2014) computed a total of 64
MFCCs to recognize bird species using Support
Vector Machine (SVM) classifier. In (Dong et al.,
2015), MFCC and a spectral ridge were applied on
24 bird sound samples, achieving an accuracy of
71%. A combination of MFCC and LPC were
adopted in (Yuan and Ramli, 2013) to classify eight
frog species using k-NN with an identification rate
of 98%. While in (Noda, Travieso and Sánchez-
Rodríguez, 2016; Colonna et al., 2016), high
recognition rates have been attained for the
classification of anuran species using MFCC and
other features such as energy. However, most of the
previous works are not well suited for WASNs as
they involve performing some kind of
transformation and extracting a large set of features.
In such studies, it is common to prioritize
recognition accuracy even if it results in higher
energy and storage costs.
Other studies developed an automatic
recognition system based on syllable features. The
idea behind such approach is to segment the stream
of sound into syllable units and then derive syllable
features. Colonna et al. (Colonna et al., 2015)
applied ZCR and an energy entropy on 896 syllables
of seven different anuran species. Alternatively, Xie
et al. (Xie et al., 2016) introduced a method to
recognize twenty-four frog species using a set of
different frequency based features in addition to
syllable, Linear Predictive Coding (LPC), and
MFCC features and using a five different machine
learning algorithms. In (Noda, Travieso and
Sánchez-Rodríguez, 2016), a syllable feature used in
conjunction with MFCC, and LFCC features for the
classification of 199 anuran spices using SVM
classifier. The results showed that the proposed set
outperforms the approaches that used only MFCC,
LFCC, or both of them. Also, in (Xie et al., 2015;
Xie et al., 2016), the authors proved that using
syllable features provide higher classification
accuracy compared to MFCC under different levels
of noise contamination.
Most of the presented schemes in reviewed
studies didn’t address the complexity and the power
consumption to prove algorithms’ efficiency. Such
works have also been conducted in the field of
species classification, but the recognition of different
types of animals is not widely known in the
literature. In addition, many current feature
extraction systems are designed for particular
applications, and hence are only appropriate for
identifying a particular type of species. Thus, it
becomes essential to develop an efficient recognition
scheme to identify different animal sounds.
3 GENERAL APPROACH FOR
ACOUSTIC-BASED
LOW-POWER SENSING
We considered the implementation of an object
recognition scheme in a WASN environment. The
network is composed of a set of smart microphone
nodes that are capable to sense and process audio
streams and scalar data. At the set-up process, the
end-user loads those sensors with the target audio-
feature’s descriptor. We assume that each sensor
node will acquire a new acoustic signal in a periodic
manner (over a time interval t). Then, the energy of
the recorded signal will be computed and compared
with a predefined threshold to generate a detection
decision. Upon detection of the presence of a new
object, the sensor node should extract a set of
representative feature descriptors that can uniquely
describe the object.
In the proposed scheme, instead of flooding the
network with a large amount and perhaps useless
transmitted data, a local classifier at each sensor
node will first make a decision on the type of
detected objects based on their extracted feature
vector and the reference descriptor. When the target
object is detected, a notification will be processed
and sent to the base station according to the end-user
requirements, which can be either a detection
notification or vector of features.
The development of such a scheme that meets
the constraints of WASNs is considered a big
challenge. In fact, the design of this scheme requires
SENSORNETS 2018 - 7th International Conference on Sensor Networks
32
the use of low complexity processing methods for
audio signal processing enabling target identification
with minimum operating power and storage
capacity. In our scheme, we focused on reducing the
dimensionality of the feature vector to be
represented by a minimum number of bytes, while
maintaining a sufficient number of features to enable
robust object recognition. This approach can reduce
the amount of data to be exchanged, and as per
consequence reduce the transmission energy
consumption.
The success of such scheme in achieving the
desired results depends mainly on two factors:
• The accuracy of the extracted features to
abstract the target.
• The size of the dataset used to represent this
feature.
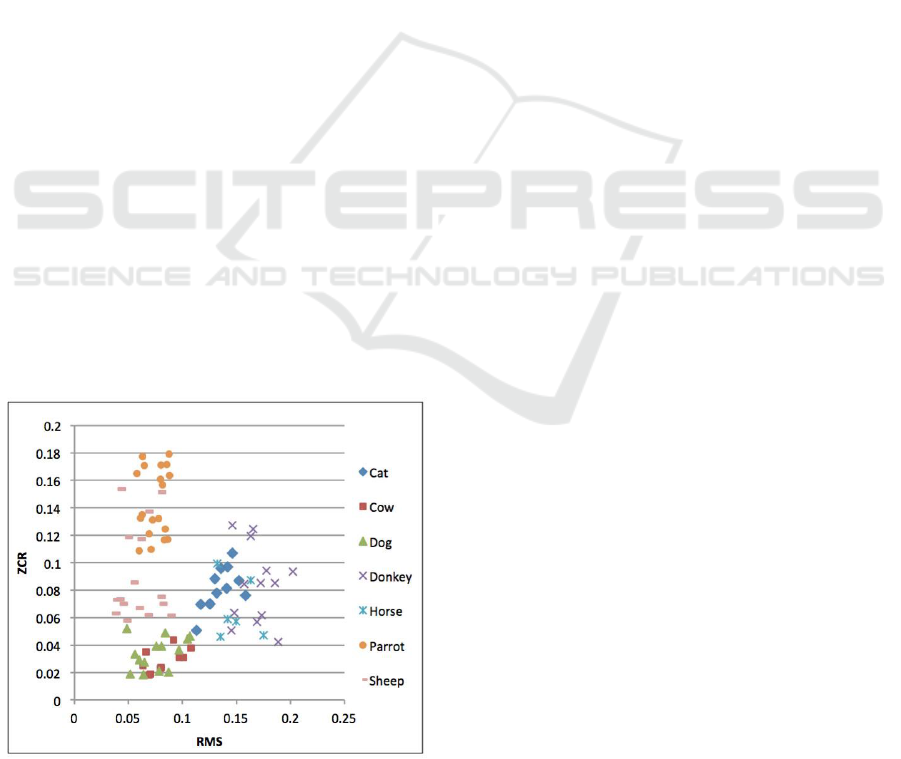
Efficient features should be capable to
discriminate between animals. However, the huge
overlapping in the feature's vectors of different
animals for the same feature makes almost
impossible to accurately identify a specific animal.
This problem is illustrated in Figure 1, where Root
Mean Square (RMS) and Zero Crossing Rate (ZCR)
values for different animals are showing a high
overlapping intervals. In addition, the small set of
training records is not sufficient enough to develop a
model with high productivity. In specific, the
learning algorithm doesn’t have enough data to
capture the underlying trends in the observed data in
order to define the class boundaries properly.Thus,
we proposed a multi-classification method in which
one animal will be assigned to two class labels. The
assignment will be based on finding the two classes
that have the same value intervals for each feature.
Figure 1: Two-dimensional feature space for animal
dataset.
4 SPECIFICATION OF THE
SENSING SCHEME FOR
TARGET RECOGNITION
The main contribution of this paper is to design a
low-complexity scheme for object recognition in
order to be used in the context of WASN. However,
achieving this goal is directly dependent on the
appropriateness of the feature extraction and
classification algorithms. Two main factors should
be taken into consideration in this task, which are:
• Network resource constraints: wireless sensor
networks are generally characterized by their
limited resources, such as small memory size,
limited power supplies, and low communication
bandwidth. Therefore, it is important to keep the
feature vector that represents the object
descriptor as short as possible. In addition, the
classification algorithm should rely on a model
that is capable of making recognition decisions
with a minimum number of data set.
• Computational complexity: The power
consumption level in the sensor node is directly
affected by the complexity of the feature
extraction and classification method. This
comes from the fact that a large number of
mathematical operations need a large number of
clock cycles to be executed, and hence increase
the demands in energy consumption. Therefore,
it is essential to adopt a low-complexity method
with as less number of arithmetic operations as
possible.
The proposed approach is composed of two
sequentially phases Figure 2: Reference vectors
extraction and object recognition. In the first phase,
different feature vectors will be extracted from each
training records and then the mean for each feature
and each object will be computed. Based on these, a
unique descriptor (one vector per animal) will be
constructed and stored. These descriptors are loaded
into the sensor memory during the set-up process.
Afterward, in the second phase, these descriptors
will be compared with the detected object feature
vector for the classification purpose. In general, each
stage is composed of multiple steps, as detailed in
the following sections.
4.1 Object Detection
The detection of a new object is based on a certain
received signal power threshold level. The purpose
of detection is to differentiate the acoustic events
from the background noise, without determining
Energy-aware Scheme for Animal Recognition in Wireless Acoustic Sensor Networks
33
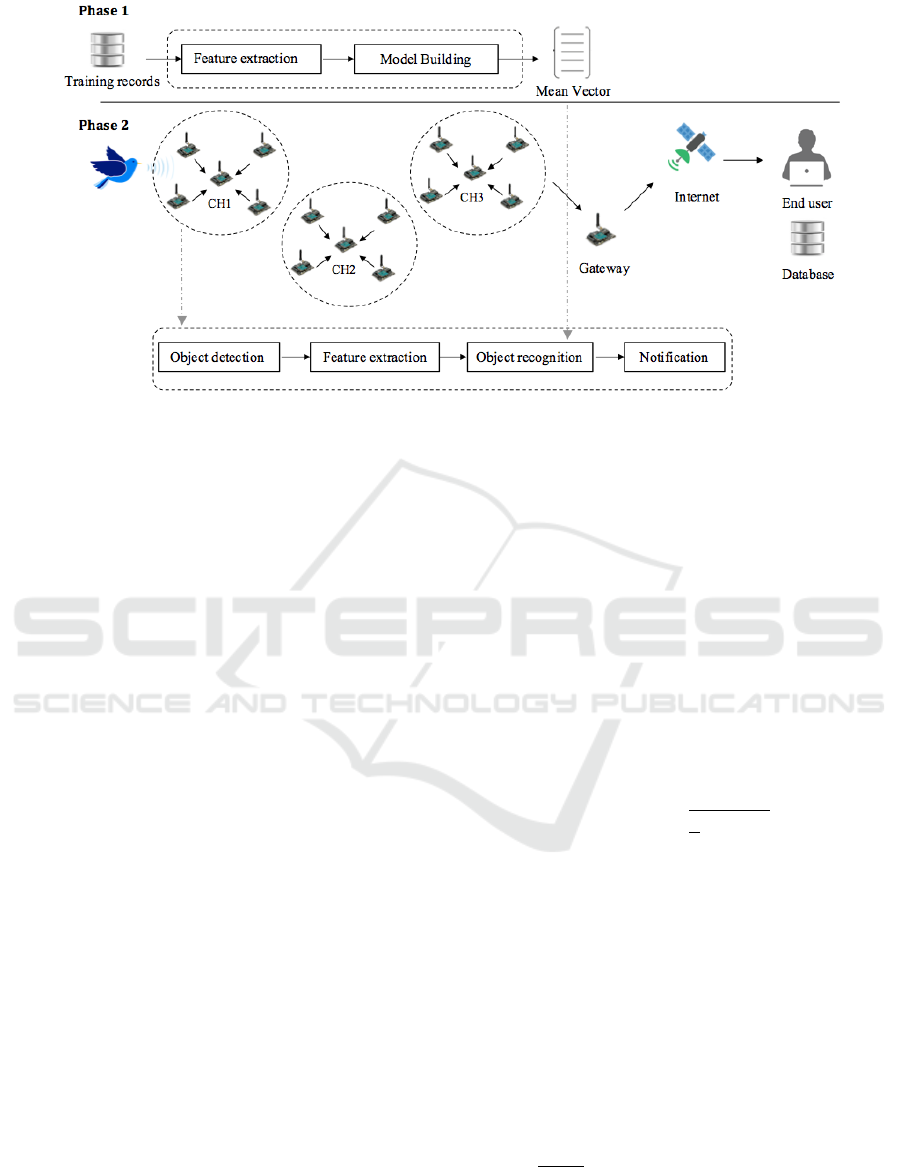
Figure 2: Flowchart of the overall object recognition scheme.
whether the target object is present or not. The
sensor will acquire a new acoustic signal in a
periodic manner (over a time interval T). Then, the
received signal energy (E) during that time interval
will be measured using the root mean square feature.
The energy should be checked, if it is greater than a
predetermined threshold value (Tthre), then a new
object is supposed to be detected. The detection
function D can be defined as follows (1)
D =
(1)
4.2 Feature’s Extraction
The feature extraction can play an important role in
saving sensor resources in terms of energy, memory
requirements and processing time. In addition, it is
an essential step in any audio based-recognition
process or classification task. In fact, the capability
of the sensor to discriminate the target object from
different auditory objects is a challenging task,
especially when it involves objects with relatively
similar sound waves. Therefore, these characteristic
features offer precise information that can maximize
discrimination between different objects, and hence
increase the recognition accuracy. The proposed
feature extraction process will be based on the
following sequential steps:
I. Divide the captured audio stream into (T)
frames; each frame has 1024 sequential samples
in which 50% of them are overlapped between
two successive frames.
II. Calculate the characteristic’s features for each
frame. In our approach, we have focused on two
temporal feature extraction methods: RMS and
ZCR (Lerch, 2012). RMS is an important
measurement that provides information about
the amplitude of a signal, while ZCR
demonstrates the characteristics of dominant
frequency.
III. Obtain the global feature vector by computing
the mean for each features’ dimension d =
1,2,..,D of N-dimensional features vector F that
is obtained from all the frames.
4.2.1 Root Mean Square Feature
It is a time domain feature denotes the average
signal strength, which can be expressed as
(2)
where x
i
is the ith sample value of the frame, and N
denoted as the frame length (Lerch, 2012).
4.2.2 Zero Crossing Rate Feature
This is a time domain feature that measures the
number of times the signal changes its sign within a
time window, from positive to negative and vice
versa. It is one of the most commonly used methods
for computing the frequency content of the signal
(Lerch, 2012), which can be calculated according to
the following equations (3)
(3)
where x(m) is the value of the m
th
sampled signal
and sgn[] is the sign function, which defined as:
SENSORNETS 2018 - 7th International Conference on Sensor Networks
34

sgn[x(n)] =
(4)
4.3 Classification
There are several classification techniques that can
be used for acoustic target recognition. These
techniques can be grouped into two general
categories: Supervised (e.g. Maximum Likelihood,
MMD, k-NN) and machine learning (e.g. artificial
neural network, classification tree, SVM)
algorithms. The machine learning classification
methods have been widely and successfully used in
many studies in the literature to recognize a single
target. However, most these classification methods
cannot be directly applied in the area of WASNs
because they significantly need large resources and
computation power than available on a low-power
sensor node. To overcome these limitations, the
developed algorithm must be computationally light
and its classification model should consume limited
storage space.
In our approach, the classification process will be
based on MMD classifier (Rudrapatna and Sowmya,
2006). The main idea of this approach is to check the
objects’ similarity by finding the class mean, which
has the minimum distance from the detected object
feature vector. In spite of its simplicity, some animal
acoustic classification approaches have adopted
MMD classifier because it can provide an acceptable
degree of accuracy in most situations (Huang et al.,
2009; Luque et al., 2016). However, since the
overlapping between animals is large in our case as
previously explained (figure 1), we used two-classes
for the classification approaches in the proposed
scheme, in which an object will yield an estimated
probability of belonging to two classes. The
classification process is composed of two phases:
I. Classification (learning) model construction:
The mean of the feature vectors of training
records will be calculated to construct the
descriptor vector for each specific object. Each
descriptor vector Refi = {μ
RMS
, μ
ZCR
}, contains
two values, which are the mean of (RMS and
ZCR) features. This vector will be stored in the
database and will be loaded into the sensor
memory to be used later in the similarity
matching stage.
II. Similarity matching: The similarity between the
newly extracted unknown object feature vector
and the reference vectors Ref
i
will be measured
and stored in a distance vector D
i
= {d
i
,…d
N
}
using the Euclidean distance metric (Xie et al.,
2016); The Euclidean distance d between two
vectors can be calculated as follows:
i = 1,..,D (5)
where f
i
is the detected object vector, and
is the
mean vector of classes. Then, we will find the two
minimum values in the distance vector D
i
, which
represent the classes that the test object belongs to.
4.4 Notification to the End User
When the target object is detected in a certain
cluster, a notification will be processed by each node
and will be sent to the cluster head. The notification
will be processed at the node level according to the
end user requirements, which can be either: few bits’
notification or vector of features. The cluster head
will find the packet with the highest RMS value and
pass it to the end user for further classification.
Then, at the end user, the feature vector will be used
to assign the target object to a single animal class.
5 IMPLEMENTATION AND
PERFORMANCES ANALYSIS
5.1 Performance Analysis at the
Application Level
The capabilities of the proposed scheme to classify a
specific target object to two classes are tested and
evaluated using MATLAB tool.
5.1.1 Pre-processing
Collected audio records have to be pre-processed
before being used. The pre-processing involves data
cleaning, audio segmentation, and audio re-
sampling. Data cleaning process aims to remove the
records that have a bad quality sound or contains
high noises. Then, the records that contain mixed
animal sounds should be segmented to produce a
record that has only single animal call. Each record
is made up of either one or multiple continuous calls
of one animal, with the duration ranging from one to
two seconds. Finally, the audio records need to be
re-sampled into a unified sampling frequency in
order to not affect the recognition accuracy. After
the pre-processing, the dataset will be divided into
two sets: training set and test set. Almost 70% of the
total collected samples are used as training data to
build the classification model, while the rest are used
Energy-aware Scheme for Animal Recognition in Wireless Acoustic Sensor Networks
35
for testing.
5.1.2 Dataset
The dataset for object recognition was built from
audio collected from Animals & Birds Sound Effects
CD (Sound-ideas.com, 2017). The rest of the
records were collected from different animal sound
library websites. The audio recordings are stored in
WAV format with a sample rate of 44.1 kHz and 16
bits per sample. The dataset contains seven animals
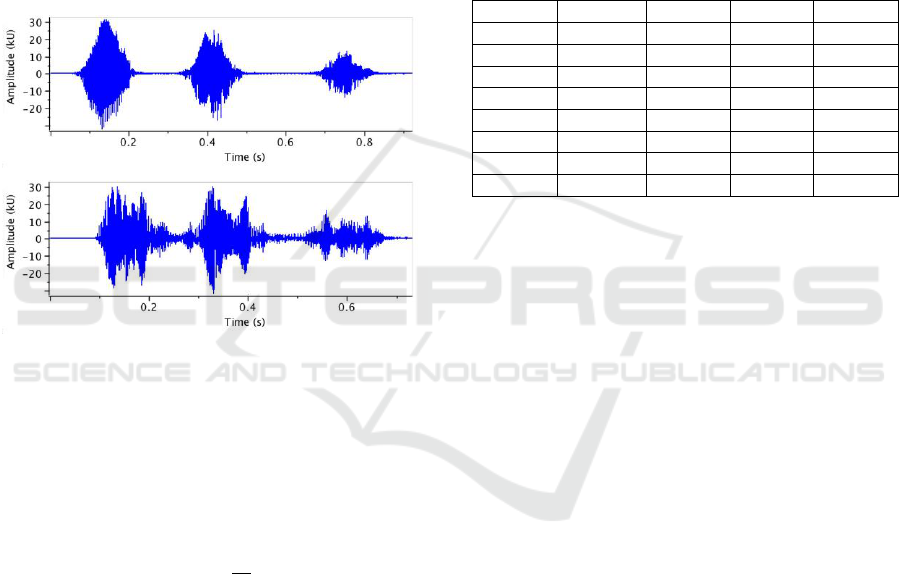
with 114 samples: Cat, Cow, Dog, Donkey, Horse,
Parrot, and Sheep. A typical example of two
different dog bark sounds is depicted in Figure 3.
Figure 3: Audio sample (wave form) for dog bark.
5.1.3 Performance Evaluation
The main metric used to examine the performance of
the proposed scheme is the successful recognition
rate. The ratio of success represents how many
objects that the algorithm was able to classify
correctly, which can be calculated as follows
(6)
where N
c
is the number of records which were
recognized correctly and N
s
is the total number of
test samples.
5.1.4 Recognition Ratio
We studied the capability of two features (RMS and
ZCR) to discriminate between different animals
using MMD and different machine learning
classifiers, namely, Decision Tree (DT), Gaussian
Mixtures Model (GMM), and K-NN (Table 1). The
machine learning classifiers were tested to decide on
which classifier best suits the single animal
classification at the end user. The results show that
the proposed scheme was capable to correctly
classify 31 out of 32 targets (accuracy of 96.88%).
We also note from Table 1 that the GNN classifier
was able to identify the target animal with better
accuracy than the DT and K-NN classifiers, gaining
71.88% recognition accuracy. Nevertheless, the
three classifiers performed poorly for Horse and
Cow. Compared to other animals, the number of
training set of these two animals is not enough for
classifiers to enable complete learning, which caused
under-fitting problem.
Table 1: The comparison of different classification
algorithm results.
Animal
MMD
DT
GMM
KNN
Cat
100%
75%
75%
75%
Cow
100%
25%
25%
25%
Dog
100%
40%
60%
40%
Donkey
100%
80%
100%
100%
Horse
50%
0%
0%
0%
Parrot
100%
100%
100%
100%
Sheep
100%
66.67%
83.33%
66.67%
Average
96.88%
62.50%
71.88%
65.63%
5.2 Energy Efficiency of the Proposed
Scheme for Sensor Node
We investigated the energy consumption of our
scheme using AVRORA (Titzer, K. Lee and
Palsberg, 2005). AVRORA is an instruction-level
sensor network simulator that emulates the Mica
family platforms (MICA2dot, MICA2, MICAz).
These motes are based on a low-power
ATmega128L micro-controller with 4KB of RAM.
The main purpose of such framework is to execute
TinyOS applications prior their deployment in actual
WSN nodes. The AVRORA helps to estimate the
number of clock cycles, power consumption, and
processing time. We focused mainly in measuring
the performance of a sensor mote during recognition
and notification task. Table 2 summarizes the cost of
the recognition task per sample, assuming a
sampling frequency of 44.1 kHz. As shown in Table
2, feature extraction is the most energy requiring and
time consuming steps of object recognition scheme,
but nevertheless it is very essential to reduce the
communication overhead and prolong the network
lifetime. Such task involves performing several
expensive computations on large sets of data
compared to other steps.
SENSORNETS 2018 - 7th International Conference on Sensor Networks
36
Table 2: Evaluation of the recognition cost on MICA2.
Sound size
Per 1 second (44100 samples)
Measured
Attribute
Clock
cycles
Time
(ms)
Energy
(mj)
New object
detection
352
0.044
0.0009
Feature
extraction
1527
0.19
0.004
Classification
12025
1.5
0.03
Whole
scheme
13904
1.734
0.0349
In Table 3, we considered measuring the notification
cost for three different scenarios, in which a sensor
node can either send a packet that includes a
detection notification, object feature vector, or
unprocessed acoustic sample. Here we assumed
using a 16-bit ADC acoustic sensor to collect audio
signals at a rate of 44100 samples per second. The
sensor will send data to the server side at a rate of 16
bits/sample * 44100 samples/second = 705600
bits/second. Thus, the power consumed during the
radio transmission for a total of 705,600 bits per
second / 8 = 88,200 bytes per second is 29106 mj.
These latter results prove that the proposed scheme
can dramatically reduce the total energy
consumption in the network.
Table 3: Evaluation of the notification cost on MICA2.
Measured Attribute
Time (s)
Energy
(mj)
Transmit detection
notification (1 byte)
0.01
0.33
Transmit 2D feature
vector (2 bytes per
feature)
0.04
1.32
Transmit raw signal (2
bytes per sample)
0.02
0.66
6 CONCLUSIONS
We presented a low-complexity scheme for target
recognition in an energy-constrained acoustic sensor
network and applied it to audio-based animal's
classification scenario. The proposed scheme uses
low-complexity feature extraction techniques, in
which the goal is to minimize the heavy processing
burden and transmission overhead on the network.
This was achieved by the detection of event of
interest locally using RMS and ZCR features, and
then reporting the event to the server with small-size
packets. Results indicate that the adopted feature
extraction methods were able to generate a unique
signature, which was successfully used to
discriminate between different auditory objects in
the recognition process. Moreover, the performed
simulations have demonstrated that the proposed
scheme can save up to 70% of power consumption,
while guaranteeing high recognition accuracy. As a
future work, we are interested to study a possible
real implementation of the proposed algorithm on
MICA2 mote.
REFERENCES
Colonna, J. G., Ribas, A. D., Santos, E. M. d., and
Nakamura, E. F. (2012). Feature sub-set selection for
automatically classifying anuran calls using sensor
networks. In: International Joint Conference on
Neural Networks (IJCNN). pp.1-8. IEEE.
Colonna, J., Peet, T., Ferreira, C., Jorge, A., Gomes, E.
and Gama, J. (2016). Automatic Classification of
Anuran Sounds Using Convolutional Neural
Networks. In: C3S2E '16 Proceedings of the Ninth
International Conference on Computer Science &
Software Engineering. ACM.
Colonna, J., Cristo, M., Salvatierra, M. and Nakamura, E.
(2015). An incremental technique for real-time
bioacoustic signal segmentation. Expert Systems with
Applications, 42(21), pp.7367-7374.
Dong, X., Xie, J., Towsey, M., Zhang, J. and Roe, P.
(2015). Generalised Features for Bird Vocalisation
Retrieval in Acoustic Recordings. In: 17th
International Workshop on Multimedia Signal
Processing (MMSP). IEEE.
Evangelista, T., Priolli, T., Silla Jr., C., Angelico, B. and
Kaestner, C. (2014). Automatic Segmentation of
Audio Signals for Bird Species Identification. In:
International Symposium on Multimedia. IEEE.
Han, N., Muniandy, S. and Dayou, J. (2011). Acoustic
classification of Australian anurans based on hybrid
spectral-entropy approach. Applied Acoustics, 72(9),
pp.639-645.
Huang, C., Yang, Y., Yang, D. and Chen, Y. (2009). Frog
classification using machine learning techniques.
Expert Systems with Applications, 36(2), pp.3737-
3743.
Lerch, A. (2012). An Introduction to Audio Content
Analysis: Applications in Signal. 1st ed. Somerset:
John Wiley & Sons.
Luque, J., Larios, D., Personal, E., Barbancho, J. and
León, C. (2016). Evaluation of MPEG-7-Based Audio
Descriptors for Animal Voice Recognition over
Wireless Acoustic Sensor Networks. Sensors, 16(5).
Noda, J., Travieso, C. and Sánchez-Rodríguez, D. (2016).
Methodology for automatic bioacoustic classification
of anurans based on feature fusion. Expert Systems
with Applications, 50, pp.100-106.
Rudrapatna M., Sowmya A. (2006) Feature Weighted
Minimum Distance Classifier with Multi-class
Energy-aware Scheme for Animal Recognition in Wireless Acoustic Sensor Networks
37

Confidence Estimation. In: Advances in Artificial
Intelligence. Springer.
Sound-ideas.com. (2017). HD – Animals & Birds Sound
Effects. [online] Available at: https://www.sound-
ideas.com/Product/380/HD-–-Animals-Birds-Sound-
Effects [Accessed 15 Jul. 2017].
Titzer, B., K. Lee, D. and Palsberg, J. (2005). Avrora:
scalable sensor network simulation with precise
timing. In: Fourth International Symposium on
Information Processing in Sensor Networks (IPSN).
IEEE.
Xie, J., Towsey, M., Eichinski, P., Zhang, J. and Roe, P.
(2015). Acoustic Feature Extraction using Perceptual
Wavelet Packet Decomposition for Frog Call
Classification. In: 11th International Conference on
eScience. IEEE.
Xie, J., Towsey, M., Truskinger, A., Eichinski, P., Zhang,
J. and Roe, P. (2015). Acoustic classification of
Australian anurans using syllable features. In: Tenth
International Conference on Intelligent Sensors,
Sensor Networks and Information Processing
(ISSNIP). IEEE, pp.7-9.
Xie, J., Towsey, M., Zhang, J. and Roe, P. (2016).
Acoustic classification of Australian frogs based on
enhanced features and machine learning algorithms.
Applied Acoustics, 113, pp.193-201.
Xie J., Towsey M., Zhang L., Zhang J., Roe P. (2016).
Feature Extraction Based on Bandpass Filtering for
Frog Call Classification. In: Image and Signal
Processing (ICISP). Springer.
Yuan, C. L. T., Ramli D. A. (2013) Frog Sound
Identification System for Frog Species Recognition.
In: Context-Aware Systems and Applications
(ICCASA). Springer.
SENSORNETS 2018 - 7th International Conference on Sensor Networks
38
