
A Model-based Approach for Self-healing IoT Systems
Position Paper
Franziska K
¨
uhn
1
, Horst Hellbr
¨
uck
1,2
and Stefan Fischer
1
1
Institute of Telematics, University of L
¨
ubeck, L
¨
ubeck, Germany
2
Center of Excellence CoSA, L
¨
ubeck University of Applied Sciences, L
¨
ubeck, Germany
Keywords:
Self-healing Systems, Model-based Approach, Internet of Things, Sensor Networks.
Abstract:
IoT systems become more and more important in our daily life. They will perform monitoring and control
tasks which are often safety-critical. Therefore, it is obviously important that IoT systems work reliably, i.e.,
fulfill their specification. Even if something unexpected happens, it is required that the system moves back
into a correct state which we name self-healing. In this paper, we present our idea for a model-based approach
for self-healing IoT systems. Based on a formal specification of the system’s properties, we derive monitors
which observe the system behavior and trigger healing actions when necessary. In IoT systems, the placement
of such systems becomes important due to the increased unreliability of single devices. The paper outlines
basic ideas where to place monitors and how to assign monitoring tasks to IoT devices.
1 INTRODUCTION
Already in 1990 Mark Weiser described the idea of
ubiquitous computing (Weiser, 1999) where comput-
ers are replaced by smart things which coalesce with
our environment. Today, the idea is becoming real-
ity very quickly. In so called Internet of Things (IoT)
environments, the environment, more specifically the
things, are equipped with a huge number of small de-
vices, sensors and actuators. In addition, (wireless)
sensor networks are often part of IoT environments.
In (Evans, 2011) it is estimated that there will exist
50 billion networked devices until 2025. It is expected
that the smart things will soon become a natural part
of our daily lives, taking over autonomously a lot of
tasks that today have to be done by humans.
Such systems must have added value for humans
to become accepted by people. They have, for in-
stance, to fulfill tasks better than humans or undertake
arduous or unpleasant tasks. For good acceptance it
is important that the systems operate reliably. In ad-
dition, reliability is a key factor as faulty behavior can
have severe consequences for both people and envi-
ronment.
However, being reliable is difficult to achieve for
large systems consisting of many heterogeneous, re-
source constrained (e.g. energy, power and memory),
usually inexpensive and thus often unreliable compo-
nents. The situation is even worse, because many
such IoT systems will operate completely unsuper-
vised and without any human (namely system admin-
istrator) intervention. As a result, reliability can nei-
ther be based on the reliability of single devices nor
on manual repair of faulty behavior.
Therefore, it is essential that the systems have self-
healing capabilities to improve their reliability. This
means that the systems are able to autonomously de-
tect and diagnose failures (and misbehavior) and au-
tonomously choose and perform appropriate mitiga-
tion strategies. Still, self-healing systems pose vari-
ous challenges (IBM, 2005; Ghosh et al., 2007; Psaier
and Dustdar, 2010; Salehie and Tahvildari, 2009), es-
pecially the specific characteristics of IoT systems.
In this position paper, a model-based approach for
self-healing IoT systems is introduced. The approach
allows for transparently attaching the self-healing ca-
pabilities to (existing) systems. Thus, the self-healing
capabilities must not be added in advance to the sys-
tems and existing ones need not to be adapted dur-
ing runtime. A key aspect of the approach is a for-
mal specification of the system properties that have
to be satisfied during runtime (e.g. quality of service
aspects). A formal specification facilitates the auto-
matic synthesis of components which observe at run-
time whether the systems satisfy or violate the prop-
erties. In case of a violation healing actions are trig-
gered to bring the system back into a correct state.
The rest of the paper is organized as follows: In
Kühn, F., Hellbrück, H. and Fischer, S.
A Model-based Approach for Self-healing IoT Systems - Position Paper.
DOI: 10.5220/0006639401350140
In Proceedings of the 7th International Conference on Sensor Networks (SENSORNETS 2018), pages 135-140
ISBN: 978-989-758-284-4
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
135

the next section related work is discussed. In Sec-
tion 3 the model-based approach to add self-healing
capabilities to IoT systems is introduced and the chal-
lenges are discussed. Afterwards in Section 4 a real-
world testbed is presented. Finally, we give an out-
look on future work and especially on how to proceed
with the project in Section 5.
2 RELATED WORK
Adding self-healing capabilities to IoT systems has
been studied before. One of the most frequently ap-
plied models to realize autonomous systems is the
MAPE-K model (Kephart and Chess, 2003; Kephart,
2005). The model describes four phases in a loop:
monitoring, analysis, planning and execution. The
phases share a knowledge base, containing for exam-
ple logs, symptoms and known faults
The MAPE-K model has already been adapted to
realize self-healing systems in wireless sensor net-
works (WSN) (Portocarrero et al., 2014) and IoT en-
vironments. The focus of the approaches differ espe-
cially on the network protocol layer and thus the types
of faults.
In (Gurgen et al., 2013) the MAPE-K model is
adapted to realize self-healing capabilities for cyber-
physical systems in smart buildings and cities. The
approach combines the concept of service-oriented
architectures and cloud computing. The focus is to
build services for monitoring and processing data and
the planning and execution of actions. End users
can use the services to equip applications with self-
healing capabilities. Anyway, the authors do not pur-
sue a model-based approach, especially to generate
the monitors and it may not be possible to transpar-
ently attach the self-healing components to (existing)
applications.
In (Nguyen et al., 2015) the MAPE-K model is
adapted to realize self-healing IoT systems. Neverthe-
less, the focus is to detect, classify and correct faulty
data only. In addition, the approach uses a central
component for the knowledge base which might be
a bottleneck and single point of failure in such large
IoT systems. Furthermore, the detection, classifica-
tion and correction of failures is performed on the
nodes itself. Due to the resource constrained nature
of IoT devices this might not be possible in all cases.
In (Bourdenas and Sloman, 2010) the self-healing
capabilities are targeted by the reconfiguration of the
nodes in case of a failure. In (Fok et al., 2009) the
application is moved on a surrogate node in case of a
failure.
In (Angarita, 2015; Angarita et al., 2015; Angarita
Arocha, 2015) self-healing capabilities are attached
to transactional Web Services but are also limited to
them.
Using Runtime Verification (RV) for monitoring
in WSN has already been studied, e.g. in (Sokolsky
et al., 2008; Herbert et al., 2007). The approaches al-
low for a formal specification of the system properties
but not for the mitigation of faults. The idea to use RV
techniques for monitoring in a self-healing system is
scratched in (Fischer and Leucker, 2013).
In (Decker et al., 2014) a monitoring framework
(using RV techniques) for interconnected medical de-
vices based on web services is introduced. The frame-
work allows to automatically generate monitors based
on a formal specification. In (K
¨
uhn et al., 2017) the
framework is adapted for monitoring interconnected
medical cyber physical systems. In addition, it is
sketched how further components for behavioral ex-
ception handling can be added towards a self-healing
system. Nevertheless, the framework is not optimized
for IoT systems (especially with regard to its resource
constrained nature).
3 MODEL-BASED APPROACH
In this section we will introduce our new model-based
approach which, based on a formal description of sys-
tem properties, follows a step by step process from
the formal requirements of the application to the im-
plementation and placement of monitoring, diagnosis
and mitigation components.
Instead of equipping the applications itself with
self-healing capabilities we aim for transparently at-
taching the required components on arbitrary nodes
or dedicated hardware. The advantage of this ap-
proach is especially that self-healing capabilities can
be attached to existing and / or resource-constrained
nodes (on extra hardware or other nodes) and the self-
healing components do not crash if the node under
scrutiny crashes.
To realize the self-healing capabilities we adapt
the MAPE-K model and the self-healing model from
our previous work described in (K
¨
uhn et al., 2017).
Figure 1 shows the three processes in a loop of our
self-healing system. It yields the three modules mon-
itoring, diagnosis and mitigation for our self-healing
model. In addition, we integrate an information base
which may be (partially) shared between the pro-
cesses.
The monitoring module comprises one or several
monitors where each monitor is responsible for one
safety or system requirement. The requirements have
to be specified formally. For that it is valuable to first
SENSORNETS 2018 - 7th International Conference on Sensor Networks
136

Monitoring Mi�ga�on
Diagnosis
connec�ons,
in-/output, ...
viola�ng event,
violated requirement,
involved systems, ...
selected
mi�ga�on strategies
invoke healing
ac�ons
sensor node
process of the self-healing system
Informa�on Base
link
process flow
shared informa�on
healing ac�ons
Figure 1: Process of a self-healing system.
create a well-defined failure model for components
and connections in IoT systems, taking into account
existing models, e.g. (Asim et al., 2010). In addition,
without a failure model it becomes more or less im-
possible to realize reliable self-healing systems. The
failure model can for example be stored in an infor-
mation base.
Typical errors that are often investigated in IoT
systems are: a component (IoT node) fails completely
or a connection (link) between components breaks.
However, in large IoT systems there are failure types
that are more difficult to detect. Components might
show temporarily unexpected behavior or connections
might falsify data temporarily due to specific hard-
ware characteristics or software errors. Be reminded
that this kind of misbehavior is not expected to be ma-
licious but happens due to coincidences. The level of
reliability achieved by a self-healing system is always
a relative rate and can be described in a formal way by
quality of service (QoS) parameter. In contrast to pure
data networks in IoT, there are more notions of QoS
which include event detection/reporting probability,
event classification error, detection delay, probability
of missing a periodic report, approximation accuracy
e.g, when nodes construct a temperature map, track-
ing accuracy e.g. difference between true and conjec-
tured position of a mobile object. Especially the life-
time of an IoT system can be described by various
states: first node failure, network half-life (how long
until 50% of the IoT components died?), partitioning
of a multi-hop IoT network, loss of coverage, failure
of first event notification.
Our goal is to consider QoS parameter and vari-
ous failure types to allow the definition of a variety
of safety and system requirements the systems have
to adhere to. For the specification appropriate for-
mal specification mechanisms have to be provided to
the users, such as, e.g., Linear-Temporal Time Logic
(Pnueli, 1977) (LTL) which is a well-known specifi-
cation language and comprehensible formalism. The
logic enables to combine boolean and temporal opera-
tors allowing for describing behavioral dynamic con-
straints of IoT systems.
For monitoring distributed systems RV (Leucker
and Schallhart, 2009) techniques have been recog-
nized as a valuable solution which we consider as one
approach to realize the monitoring component. RV fa-
cilitates the automatic synthesis of monitors based on
a formal specification such as LTL. The monitors then
observe at runtime whether the systems adhere to the
specified requirements. For this purpose the monitors
analyze at runtime the input and output of the com-
ponents or the connections during runtime. In case of
a failure, necessary information (e.g. violating event,
violated requirement, involved IoT devices) is passed
to the next module.
In the second module, named diagnosis, the ex-
tract of the monitoring process is combined and the
causing failure is identified. This task is especially
challenging. A formal description of the behavior
of the diagnosis module might require new language
concepts. Furthermore, the second module is respon-
sible to choose appropriate mitigation actions. As a
first basic solution the diagnosis could for example be
realized using event-condition-action-rules.
The third module mitigation invokes the healing
actions chosen by the previous module to repair the
system which means to transfer the system into a cor-
rect state again. The healing actions comprise restart
of hardware or software components, triggering ac-
tions, relocation of software components just to name
a few. It is obvious that only actions can be realized
that are provided by the components (on software as
well as hardware level).
Common to all aforementioned modules is that
they might be placed on resource-constrained nodes.
Usually, IoT systems are large distributed systems
with many constraints like limited computing power,
small link bandwidth and limited energy resources.
Especially wireless sensor networks often consist of
resource-constrained nodes. The choice, number and
the placement of the above described modules needs
to be carefully considered. For that reason, it is
necessary to implement the modules as resource-
efficiently as possible which introduces a trade-off
between different strategies consuming different re-
sources. Thus, a formal description needs to include
these constraints. Depending on the constraints and
requirements the modules adapt by implementing dif-
ferent strategies.
Both the implementation of the modules itself and
A Model-based Approach for Self-healing IoT Systems - Position Paper
137

the number and placement of the components needs
to be considered carefully. Furthermore, the system
needs the ability to relocate services dynamically and
efficiently, especially if a node under scrutiny crashes
or if requirements (e.g. QoS parameter) change during
runtime. Particularly, for the number and placement
the requirements and constraints have to be taken into
account. In the following a few considerations for the
number and placement are listed:
• For powerful nodes it might be valuable to exe-
cute several complex monitors whereas for small
devices this is not feasible. Instead, several small
monitors on different nodes or on dedicated hard-
ware is a better choice.
• It is often not useful to put the monitoring com-
ponent on the node it observes itself but rather to
realize a mutual observation of several nodes.
• It has to be evaluated whether it is feasible to
use a diagnosis component for several monitors
and a mitigation component for several diagnosis
components respectively, achieving a hierarchical
placement.
• Likewise, a hierarchical arrangement of the mon-
itors themselves have to be taken into account.
• Central components in large distributed systems
often do not make sense. Strategies to share
and synchronize for example the information base
have to be considered.
• In contrast to a hierarchical placement, in some
cases a single central component for all self-
healing tasks might be advantageous.
• For safety-critical systems it might be useful to
deploy redundant components.
A formal description needs to include these and other
constraints and characteristics. Based on a formal de-
scription, algorithms for the calculation of the num-
ber and the automatic placement and relocation of the
components have to be developed.
Besides the automatic deployment and placement
of the components it is important to develop and
implement a resource-saving protocol for “global”
agreement of the placement of the self-healing com-
ponents between the concerning nodes. For the devel-
opment, amongst others, network problems, lost mes-
sages and temporarily unavailable nodes have to be
taken into account. Protocols and approaches of other
(research) fields, e.g. from mobile communications,
have to be evaluated.
For the implementation web services or service-
oriented architectures (SOA) tailored to IoT systems
and combined with semantic description languages,
e.g. (Ankolekar et al., 2002), provide an excellent
choice, see (Glombitza, 2011; Kleine, 2016). Fur-
thermore, the use of fog or dew computing might be a
valuable approach to improve for example the perfor-
mance or to reduce the complexity.
In summary, our approach is based on standard-
ized flexible technologies to build large distributed
systems like web services or SOA that we tailor to the
needs of IoT systems combined with the automatic
generation of modules by formal descriptions. A spe-
cial challenge in our approach is an automatic deploy-
ment and relocation of the modules in large heteroge-
neous IoT systems.
4 A REAL-WORLD TESTBED
We strongly believe that it is very important to in-
clude both real-world experiments and simulations in
the development process of IoT systems. In other
words, one needs experimental environments such as
WISEBED (Coulson et al., 2012) or SmartSantander
(Sanchez et al., 2014). For our experiments, we bor-
row the sample scenario and experimental platform
from a real-world wireless sensor network project
called Smart Bridge
1
. Since a few months already,
we have been running a sensor network on a Bavarian
highway bridge. The goal of this project is to do a
long-term monitoring of the bridge in order to detect
problems. E.g., changes of cracks over time are mon-
itored with the aim of detecting abnormalities as soon
as possible. Figure 2 shows the general architecture of
our monitoring solution, consisting of the sensor net-
work itself and the backend where all measurement
data is collected. In addition, there is a visualization
frontend. It should be noted that all sensor nodes are
solely battery-powered and we employ a number of
mechanisms in order to save energy and let the sensor
network survive as long as possible.
Figure 3 shows a single sensor responsible for
measuring certain parameters of the crack (e.g. the
width or length of the crack). The sensor node not
only consists of the sensor itself (a linear encoder in
this case) but also of a computation / communication
entity. It is possible to run more or less arbitrary soft-
ware on this entity which allows to run our proposed
runtime monitors on the sensor nodes. The runtime
monitors are automatically generated based on a for-
mal description of the properties of interest. At run-
time, the monitors observe the system or the sensed
data and examine whether the properties are satisfied
or violated (i.g. whether abnormalities of the cracks
are detected or not). In case of a violation further ac-
1
http://www.intelligentebruecke.de
SENSORNETS 2018 - 7th International Conference on Sensor Networks
138
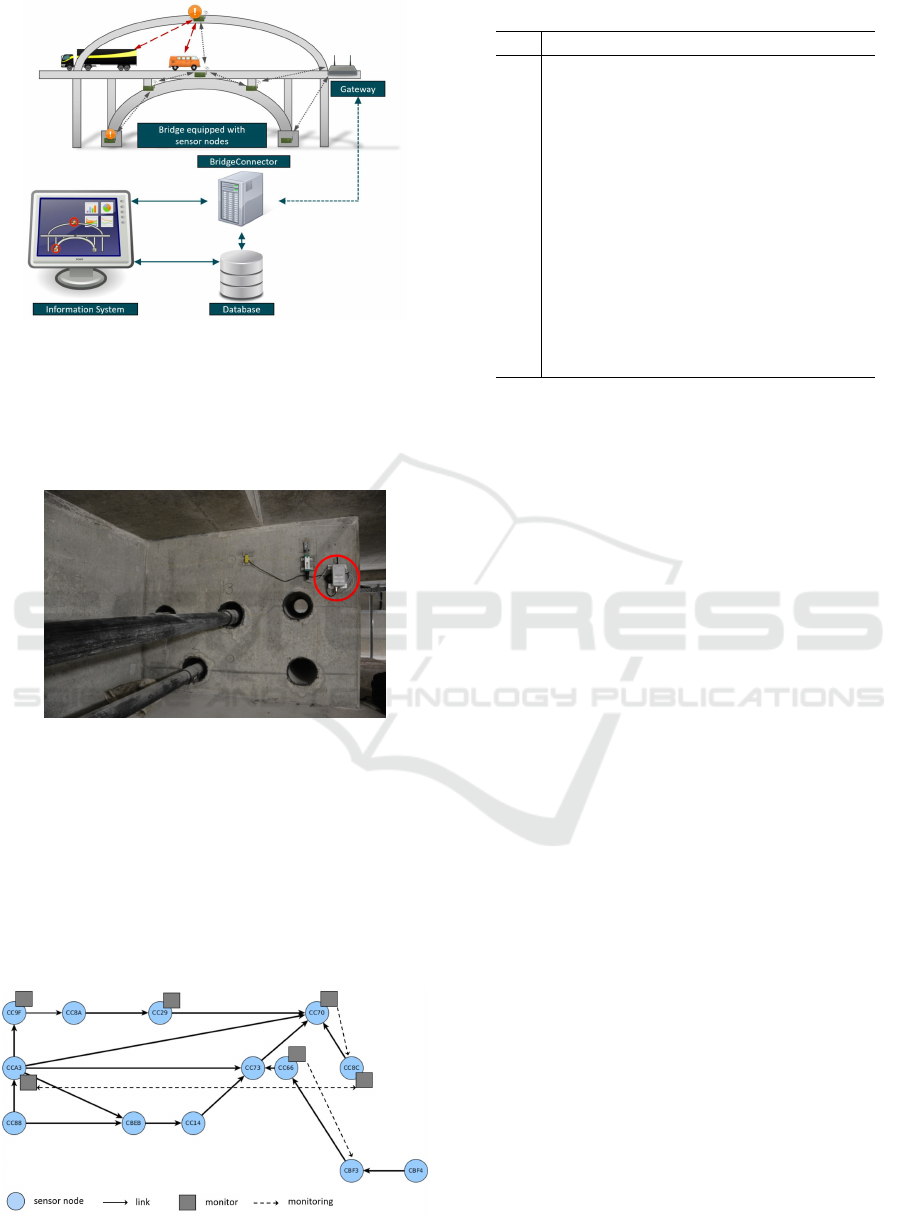
Figure 2: General architecture of the monitoring solution.
tions can be triggered (e.g. the respective traffic office
is automatically informed) by the appropriate compo-
nents of the self-healing system. These components
can be deployed for example on the same sensor node,
on other sensor nodes or on dedicated hardware.
Figure 3: A single sensor node monitoring a crack.
Finally, Figure 4 shows the configuration of all
sensors into the overall sensor network along with the
strongest links. The network consists of 13 nodes.
Their tasks are shown in Table 1. The figure also
shows possible placements of the monitors along with
the nodes they may observe. Please note that this
visualization is a bit misleading, because the moni-
tors rather observe events and check properties of the
overall system instead of single or groups of devices.
Figure 4: The network of sensors with its strongest links.
Table 1: Sensor nodes with their individual tasks.
ID MAC suffix Task
59 CC70 gateway
60 CBEB surface temperature
61 CBF4 weather station
62 CC14 surface temperature
63 CBF3 outside temperature and
humidity
64 CC29 Crack 1 monitoring
65 CC66 repeater
67 CC73 repeater
68 CC8C Crack 2 monitoring
69 CCA3 Crack 2 monitoring
70 CC9F Crack 1 monitoring
71 CC88 expansion
72 CC8A inclination
This scenario / experimental environment is very
well suited for our purposes due to the following rea-
sons:
• It offers a sufficient number of nodes in order to
evaluate a number of strategies for the distribution
of the monitoring, diagnosis and mitigation com-
ponents.
• Due to the harshness of the environment, it can
be expected that sensor nodes show realistic and
various failures from time to time.
• The network is multi-hop, allowing to compare
strategies which place the monitors for a certain
property in one-hop distance to those which place
the monitors in multi-hop distance, but on a po-
tentially more reliable node.
• Since we know the functionality of single nodes
we can take this information into account when
placing the runtime monitors.
5 OUTLOOK
In this paper, we introduced our idea for a model-
based approach for self-healing IoT systems, along
with a potential and realistic experimental environ-
ment. The key challenges are the functionality and
the placement of the self-healing components, partic-
ularly of the monitors which observe the system be-
havior and detect violations of properties. The detec-
tion of violations makes it possible to trigger appro-
priate actions trying to bring the system back into a
correct state and to prevent harm. In the near future,
we are going to develop the concepts in more detail
and start the implementation in the next step. Espe-
cially, the resulting implementation will be analyzed
A Model-based Approach for Self-healing IoT Systems - Position Paper
139

and optimized in a long-term performance evaluation
on the highway bridge system soon.
REFERENCES
Angarita, R. (2015). Responsible objects: Towards self-
healing internet of things applications. In 2015 IEEE
International Conference on Autonomic Computing.
IEEE.
Angarita, R., Rukoz, M., and Cardinale, Y. (2015). Model-
ing dynamic recovery strategy for composite web ser-
vices execution. World Wide Web.
Angarita Arocha, R. (2015). An approach for Self-healing
Transactional Composite Services. (Une approche
auto-corrective pour des services composites trans-
actionnels). PhD thesis, Paris Dauphine University,
France.
Ankolekar, A., Burstein, M., Hobbs, J. R., Lassila, O., Mar-
tin, D., McDermott, D., McIlraith, S. A., Narayanan,
S., Paolucci, M., Payne, T., et al. (2002). Daml-s: Web
service description for the semantic web. In Interna-
tional Semantic Web Conference. Springer.
Asim, M., Mokhtar, H. M., and Merabti, M. (2010). A self-
managing fault management mechanism for wireless
sensor networks. CoRR.
Bourdenas, T. and Sloman, M. (2010). Starfish: Policy
driven self-management in wireless sensor networks.
In Proceedings of the 2010 ICSE Workshop on Soft-
ware Engineering for Adaptive and Self-Managing
Systems. ACM.
Coulson, G., Porter, B., Chatzigiannakis, I., Koninis, C.,
Fischer, S., Pfisterer, D., Bimschas, D., Braun, T.,
Hurni, P., Anwander, M., Wagenknecht, G., Fekete,
S. P., Kr
¨
oller, A., and Baumgartner, T. (2012). Flex-
ible experimentation in wireless sensor networks.
Commun. ACM, 55(1):82–90.
Decker, N., K
¨
uhn, F., and Thoma, D. (2014). Runtime ver-
ification of web services for interconnected medical
devices. In 2014 IEEE 25th International Symposium
on Software Reliability Engineering. IEEE.
Evans, D. (2011). The internet of things: How the next
evolution of the internet is changing everything.
Fischer, S. and Leucker, M. (2013). Runtime verification
and reflection for wireless sensor networks. In 2013
4th International Workshop on Software Engineering
for Sensor Network Applications. IEEE.
Fok, C.-L., Roman, G.-C., and Lu, C. (2009). Agilla: A mo-
bile agent middleware for self-adaptive wireless sen-
sor networks. ACM Trans. Auton. Adapt. Syst.
Ghosh, D., Sharman, R., Rao, H. R., and Upadhyaya, S.
(2007). Self-healing systems—survey and synthesis.
Decision Support Systems.
Glombitza, N. (2011). Ein dynamisches, ganzheitliches
Gesch
¨
aftsprozessmanagement in Enterprise-IT-
Systemen und drahtlosen Sensornetzen. PhD thesis,
Universit
¨
at zu L
¨
ubeck.
Gurgen, L., Gunalp, O., Benazzouz, Y., and Galissot, M.
(2013). Self-aware cyber-physical systems and appli-
cations in smart buildings and cities. In Design, Au-
tomation & Test in Europe Conference & Exhibition
(DATE), 2013. EDAA.
Herbert, D., Sundaram, V., Lu, Y.-H., Bagchi, S., and Li, Z.
(2007). Adaptive correctness monitoring for wireless
sensor networks using hierarchical distributed run-
time invariant checking. ACM Transactions on Au-
tonomous and Adaptive Systems.
IBM (2005). An architectural blueprint for autonomic com-
puting.
Kephart, J. and Chess, D. (2003). The vision of autonomic
computing. Computer.
Kephart, J. O. (2005). Research challenges of autonomic
computing. In Proceedings of the 27th international
conference on Software engineering. ACM.
K
¨
uhn, F., Thoma, D., Labitzke, D., and Fischer, S. (2017).
Monitoring as a service for networked medical cyber-
physical systems. In 11th International Workshop on
Service-Oriented Cyber-Physical Systems in Converg-
ing Networked Environments (SOCNE). IEEE Com-
puter Society. In Press.
Kleine, O. (2016). Semantic Web im Internet der Dinge:
Konzeption, Implementierung und prototypische An-
wendungen. PhD thesis, Universit
¨
at zu L
¨
ubeck.
Leucker, M. and Schallhart, C. (2009). A brief account of
runtime verification. The Journal of Logic and Alge-
braic Programming.
Nguyen, T. A., Aiello, M., Yonezawa, T., and Tei, K.
(2015). A self-healing framework for online sensor
data. In 2015 IEEE International Conference on Au-
tonomic Computing. IEEE.
Pnueli, A. (1977). The temporal logic of programs. In 18th
Annual Symposium on Foundations of Computer Sci-
ence (sfcs 1977). IEEE.
Portocarrero, J. M. T., Delicato, F. C., Pires, P. F., G
´
amez,
N., Fuentes, L., Ludovino, D., and Ferreira, P. (2014).
Autonomic wireless sensor networks: A systematic
literature review. J. Sensors.
Psaier, H. and Dustdar, S. (2010). A survey on self-healing
systems: approaches and systems. Computing.
Salehie, M. and Tahvildari, L. (2009). Self-adaptive soft-
ware: Landscape and research challenges. ACM
Transactions on Autonomous and Adaptive Systems
(TAAS).
Sanchez, L., Mu
˜
noz, L., Galache, J. A., Sotres, P., San-
tana, J. R., Gutierrez, V., Ramdhany, R., Gluhak, A.,
Krco, S., Theodoridis, E., and Pfisterer, D. (2014).
Smartsantander: Iot experimentation over a smart city
testbed. Computer Networks, 61(Supplement C):217
– 238. Special issue on Future Internet Testbeds – Part
I.
Sokolsky, O., Sammapun, U., Regehr, J., and Lee, I. (2008).
Runtime verification for wireless sensor network ap-
plications. In Runtime Verification. IBFI.
Weiser, M. (1999). Some computer science issues in ubiq-
uitous computing. ACM SIGMOBILE Mobile Com-
puting and Communications Review.
SENSORNETS 2018 - 7th International Conference on Sensor Networks
140
