
Background-Invariant Robust Hand Detection based on Probabilistic
One-Class Color Segmentation and Skeleton Matching
Andrey Kopylov, Oleg Seredin, Olesia Kushnir, Inessa Gracheva and Aleksandr Larin
Institute of Applied Mathematics and Computer Science, Tula State University, Tula, Russian Federation
Keywords:
Hand Detection, One-class Classification, Pixel Color Classifier, Support Vector Data Description, Structure
Transferring Filter, Skeleton Matching.
Abstract:
In this paper we present a new method of hand detection in cluttered background for video stream processing.
At first, skin segmentation is performed by one-class color pixel classifier which is trained using just a face
image fragment without any background training sample. The modified version of one-class classifier is
proposed. For each pixel it returns the grade (probability) of its belonging to the skin category instead of
common binary decision. To adjust output of the one-class classifier the structure-transferring filter built on
probabilistic gamma-normal model is applied. It utilizes additional information about the structure of an image
and coordinates local decisions in order to achieve more robust segmentation results. To make a final decision
whether an image fragment is the image of human hand or not, the method of binary image matching based on
skeletonization is employed. The experimental study on segmentation and detection quality of the proposed
method shows promising results.
1 INTRODUCTION
Accurate and robust hand detection in a video stream
is necessary and crucial stage in construction of easy-
to-use human-computer interaction systems as an al-
ternative to touch-based devices in surgery, robot con-
trol, bio identification, etc. In spite of noticeable
progress in this field there are still several challenges
to be addressed, for instance, background clutter, il-
lumination change, hand shape flexibility. It is espe-
cially important to tackle them in hand detection sys-
tems working in real-life environment.
It is possible to specify three main approaches to
the solution to this problem: 1) the approach based on
background subtraction techniques (Benezeth et al.,
2008; Piccardi, 2004; Shiravandi et al., 2013), 2) the
approach focused on skin-color segmentation (Jones
and Rehg, 2002; Kakumanu et al., 2007; Phung
et al., 2005; Vezhnevets et al., 2003; Wimmer and
Munchen, 2005) and further hand detection with
possible usage of additional information about hand
shape peculiarities (Junqiu and Yagi, 2008), 3) the ap-
proach utilizing depth information (Suarez and Mur-
phy, 2012).
Background subtraction techniques require un-
changeable background within the chosen model.
Such a serious drawback significantly limits a num-
ber of their applications in video stream processing.
Segmentation methods using in the second ap-
proach are based on parametric representation of
color space domain (RGB, HSV, YCbCr) which cor-
responds to the color of skin. In particular, simple
thresholding (Francke et al., 2007; Kakumanu et al.,
2007; Vezhnevets et al., 2003), PCA-based ellipsoid
descriptions (Hikal and Kountchev, 2011; Wimmer
and Munchen, 2005) and Gaussian mixture models
(Hassanpour et al., 2008; Jones and Rehg, 2002)
could be applied. However, in real environment the
geometry of skin color domain inside the color space
could be changed dramatically. In addition, individual
skin color characteristics vary from person to person
which leads to the necessity of utilizing adaptive color
models. Geometric features of hand shape are often
used to improve the quality of segmentation. The con-
tour of hand can be obtained by applying edge detec-
tion operators. The combination of shape, texture and
color features may produce better performance (Jun-
qiu and Yagi, 2008). There are several methods fo-
cusing on the hand morphology features, such as fin-
gertips (Oka et al., 2002). One first common clue
to fingertips detection is the curvature (Argyros and
Lourakis, 2006), and another is template matching.
Images of fingertips (Crowley et al., 1995) or fingers
(Rehg and Kanade, 1995) could be used as templates.
Kopylov, A., Seredin, O., Kushnir, O., Gracheva, I. and Larin, A.
Background-Invariant Robust Hand Detection based on Probabilistic One-Class Color Segmentation and Skeleton Matching.
DOI: 10.5220/0006649805030510
In Proceedings of the 7th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2018), pages 503-510
ISBN: 978-989-758-276-9
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
503

However, template matching has some inherent draw-
backs: 1) it is computationally expensive; 2) it can-
not cope with scaling or rotation changes of the tar-
get hand; 3) hand shape can vary dramatically due to
its 22 degrees of freedom, so it could be difficult to
choose the right template. See the comprehensive re-
view of above-mentioned techniques in (Zhu et al.,
2013).
Taking into account additional information about
scene depth partly overcomes these disadvantages
(Suarez and Murphy, 2012). Nevertheless, such ap-
proach assumes that no other objects are placed be-
tween the hand and the camera and requires additional
equipment.
We propose to use a fragment of a human face
on the current video frame for adaptive adjustment
of the skin-color model to compensate illumination
changes, since human faces can be easily detected by
Viola-Jones method (Jones and Viola, 2003). Simi-
lar idea is described in (Francke et al., 2007), but a
simple single Gaussian model is used there for skin
color description. In contrast, we apply here a mod-
ified version of the one-class pixel classifier (Larin
et al., 2014) which does not need to collect any train-
ing data for background modeling. The advantage of
one-class classifier over statistical threshold is that the
region of interest in color space is described by more
complex geometrical shape than just cuboids or ellip-
soids, by means of Support Vector Data Description
method (SVDD) (Tax and Duin, 2004). This fact lets
minimizing the misclassification of skin-colored pix-
els. Re-training of the classifier could be performed
in near real-time within almost every single frame of
video stream.
The proposed segmentation method implies the
further modification of one-class classifier. We use
Bayesian approach on the basis of gamma-normal
probabilistic model (Gracheva et al., 2015; Gracheva
and Kopylov, 2017). Such a model lets us define and
correct probabilistic relations between rough classifi-
cation results of each individual element on a frame
based on the structure of a source image.
Thereby, the color segmentation allows selecting
a set of candidates (binary image fragments) for sub-
sequent decision about their possible belonging to the
class of hands, or hand detection.
It is worth noting that one of the most popular
approaches to hand detection today is the method of
Viola and Jones (Bowden, 2004; Fang et al., 2007;
Jones and Viola, 2003). In general, this method is
utilized for real-time detection of different kinds of
objects in images. For example, it is implemented in
OpenCV computer vision library for human face de-
tection. However, it is necessary to collect large high-
quality training set to apply Viola-Jones method to
the hand detection problem. Taking into account the
number of a human hand degrees of freedom, the gen-
eration of the proper training dataset becomes rather
sophisticated task. In (Bowden, 2004) the dataset in-
cludes 5013 images of hands, divided into the training
set consisting of 2504 images, and the test set consist-
ing of 2509 images.
Our solution to the hand detection problem in-
cludes the shape skeleton matching method based on
the pair-wise alignment of skeleton primitive chains
(Kushnir and Seredin, 2015). The main advantage of
the method is its invariance to the scaling and rota-
tion changes of the target hand. The skeleton of a
segmented binary object is described by the primi-
tive chain, then the chain is compared with the skele-
ton primitive chain of the typical hand shape. If the
dissimilarity measure is less then some predefined
threshold, the object is classified as a hand. For the
more robust classification result several typical hand
shapes could be used.
Overall result of our hand detection method will
be the binary mask corresponded to the hand region
on the current video frame, coupled with the skeleton
description of the hand shape. It allows solving ges-
ture recognition or bio-identification tasks afterwards.
The general flow-chart of the proposed hand detection
method is shown in Figure 1.
Figure 1: General flow-chart of the proposed hand detection
method.
The paper is organized in the following way. In
Section 2, the parametric representation of skin color
by one-class classifier is described. The probabilistic
method of skin segmentation based on such a para-
metric representation is introduced in Section 3. Sec-
tion 4 describes the approach to hand detection based
on the shape skeleton matching. Finally Section 5 is
devoted to the experimental results and quality evalu-
ation.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
504

2 PARAMETRIC
REPRESENTATION OF SKIN IN
COLOR SPACE USING
ONE-CLASS CLASSIFIER
The approach to segmentation based on skin color
representation requires a pixel distribution model in
the proper color space. In the real-life environment
the individual peculiarities of a persons skin and il-
lumination changes vary the color set of skin pixels
completely.
To avoid these obstacles we use the modification
of one-class pixel classifier (Larin et al., 2014) which
does not use the background model. In contrast to
static threshold decision, the one-class classifier al-
lows describing more complex surface than cuboid,
cylindrical or ellipsoid (Fritsch et al., 2002; Hsieh
et al., 2012; Kim et al., 2005; Sabeti and Wu, 2007).
This advantage is provided by using kernel trick in the
SVDD (Tax and Duin, 2004) and allows minimizing
skin-color pixels misclassification. The second bene-
fit is the ability of real-time classifier re-training; we
can adjust the color model in every single frame.
As a training set for the one-class color classifier
we use a set of pixels in a rectangle located in the cen-
tral part of face (see Figure 2(a)). Face detection is
a well-developed technique (Degtyarev and Seredin,
2010) so this stage is performed in a rather simple
way – we use the OpenCV realization of Viola-Jones
method. The parameters of training region inside
the face rectangle are defined as in (Degtyarev and
Seredin, 2010). Particularly, the shift from the top of
the face rectangle is equal to 0.49 of the face rectan-
gle height, and the height and the width of training
fragment are equal to 0.11 and 0.6 of the height and
the width of the face rectangle correspondingly. This
area lies between the eyes and nose tip, it is less de-
formable and free of beard, mustache, glasses, head-
dress, make-up.
This idea allows us to provide on-line estimation
of skin color changes at every new frame, but requires
a face presented in the scene (or reliable face detec-
tion). Otherwise, we can use a preliminary trained
model.
The training set for the one-class classifier is a
cloud of points in color-space. Flexibility of the
describing surface in color space is defined by the
parameter of Gaussian kernel in SVDD (see Fig-
ure 2(b)). After the training it is possible to make a
fast decision about similarity between each pixel of an
image and the training fragment checking whether a
pixel belongs to the hypersphere in the Hilbert space.
Figure 2: Parametric representation of skin: (a) training re-
gion; (b) training set of pixels (dark points) shown in RGB
color space and the describing decision surface (light gray)
built by the one-class classifier.
3 PROBABILISTIC IMAGE
SEGMENTATION BASED ON
PARAMETRIC
REPRESENTATION OF SKIN
Parametric representation of skin by itself cannot pro-
vide robust and accurate segmentation (see Figure 3)
since it is based on pixel properties in color space only
and does not take into account any spatial relations
between neighboring pixels as well as the structure of
homogeneous regions inside the image.
Figure 3: Results of color segmentation via one-class pixel
color classifier. The segmentation inside the face bounding
box was omitted.
Instead of well-known segmentation methods (e.g.
described in (Bali and Singh, 2015)) which, unfortu-
nately, needs too long processing time for online hand
detection, we propose here to use the new class of
filters, called structure-transferring filters which arise
recently in the literature (He et al., 2013; Zhang et al.,
2014). The main idea of structure-transferring filters
is to extract the structure from the so-called guided
image and make the filtering result of the source im-
age consistent with this structure. Joint Bilateral Fil-
ter (Petschnigg et al., 2004) and Guided Filter (He
et al., 2013) currently occupies a leading position
among the filters of this class. The main disadvantage
of the Joint Bilateral Filter and the Guided Filtration is
the presence of artifacts, which visually manifested in
the form of halos around the edges of the objects. The
appearance of such artifacts is a characteristic of all
filters with finite impulse response which is explained
by the Gibbs effect. Recent attempts to overcome this
Background-Invariant Robust Hand Detection based on Probabilistic One-Class Color Segmentation and Skeleton Matching
505

drawback (Zhang et al., 2014) using weighted global
average parameters of corresponded model increase
computational complexity beyond the real-time lim-
its.
In this paper we use alternative Bayesian approach
described in (Gracheva et al., 2015; Gracheva and
Kopylov, 2017) and based on the special model of the
Markov random field, called gamma-normal model
(Krasotkina et al., 2010). It makes possible to take
into account the structure which extracted from the
“guide” image through setting an appropriate proba-
bilistic relationships between elements of the sought
for filtering result.
Let Y = (y
t
,t ∈ T ) be an initial data array defined
on a subset of the two-dimensional discrete space
T = {t = (t
1
,t
2
) : t
1
= 1,...,N
1
,t
2
= 1,...,N
2
} and let
X = (x
t
,t ∈ T ) defined on the same argument set plays
the role of desirable result of processing. We will con-
sider Y and X as the observed and hidden components
of the two-component random field (X,Y ). Prob-
abilistic properties of two-component random field
(X,Y) are completely determined by the joint condi-
tional probability density Φ(Y |X, δ) of original data
Y = (y
t
,t ∈ T ) with respect to the secondary data X =
(x
t
,t ∈ T ), and the a prior joint distribution Ψ(X|Λ,δ)
of hidden component X = (x
t
,t ∈ T ).
Let the joint conditional probability density
Φ(Y |X,δ) be in the form of Guassian distribution:
Φ(Y |X,δ) =
1
δ
(N
1
N
2
)/2
(2π)
(N
1
N
2
)/2
×
×exp(−
1
2δ
∑
t∈T
(y
t
− x
t
)
2
), (1)
where δ is the variance of the observation noise,
which is assumed to be unknown.
The a priori joint distribution Ψ(X|Λ, δ) of the
hidden component X = (x
t
,t ∈ T ) is also assumed
Gaussian. But the variance r
t
of hidden variables is
assumed to be different at different points t ∈ T of
the hidden field X . It is convenient to make r
t
,t ∈ T
proportional to the variance of observation noise r
t
=
λ
t
δ. Coefficients of proportionality Λ = (λ
t
,t ∈ T )
can serve as a means to flexibly define the structure
of probabilistic relationships between elements of the
hidden field X = (x
t
,t ∈ T ).
Under this assumption, we come to the improper
a priori density:
Ψ(X|Λ,δ) ∝
1
∏
t∈T
δλ
t
1/2
(2π)
(N
1
N
2
)/2
×
×exp
−
1
2
∑
t
′
,t
′′
∈V
1
δλ
t
(x
t
′
− x
t
′′
)
2
, (2)
where V is the neighborhood graph of the image ele-
ments having the form of a lattice.
Finally, we assume the inverse coefficients 1/λ
t
to be a priori independent and identically gamma-
distributed on the positive half-axis λ
t
≥ 0.
G(Λ|δ,η,µ) = exp
−
1
2δµ
∑
t∈T
η
1
λ
t
+
1
η
lnλ
t
,
(3)
where η and µ is, respectively, the basic average fac-
tors of variability.
If µ → 0, then 1/λ
t
is almost completely concen-
trated around the mathematical expectation 1/η, and
with µ → ∞, 1/λ tends to have the almost uniform dis-
tribution.
The joint a posteriori distribution of hidden field
X and Λ is completely defined by (1), (2) and (3):
P(X,Λ|Y,δ, η,µ) =
=
Ψ(X|Λ,δ)G(Λ|η,µ)Φ(Y |X,δ)
∫ ∫
Ψ(X
′
|Λ
′
,δ)G(Λ
′
|η,µ)Φ(Y |X
′
,δ)dX
′
dΛ
′
. (4)
It is easy to see that the maximum a posteriori
probability (MAP) estimate leads to the minimization
of the following goal function.
J(X, Λ|Y, η,µ) =
∑
t∈T
(y
t
− x
t
)
2
+
+
∑
t
′
,t
′′
∈V
1
λ
t
′
(x
t
′
− x
t
′′
)
2
+ η/µ
+ (1 +1/µ) lnλ
t
′
.
(5)
If the field of coefficients is fixed, optimal MAP
estimation of X can be obtained by solving the fol-
lowing simple quadratic optimization task:
ˆ
X = argmin
X
∑
t∈T
(y
t
− x
t
)
2
+
∑
t
′
,t
′′
∈V
1
λ
t
(x
t
′
− x
t
′′
)
2
,
by using the extremely fast procedure on the basis of
tree-serial dynamic programming (Mottl and Blinov,
1998).
If X = (x
t
,t ∈ T ) is fixed X = X
g
, criterion (5)
gives the following equation for optimal Λ with fixed
structural parameters η and µ:
ˆ
λ
t
′
(X
g
,η,µ) = η
(1/η)(x
g
t
′
− x
g
t
′′
)
2
+ 1/µ
1 + 1/µ
,
t
′
,t
′′
∈ V.
The additional guided image can serve here as
X
g
to objectify its structure by
ˆ
Λ = (
ˆ
λ
t
,t ∈ T ). As
mentioned above, the field Λ = (λ
t
,t ∈ T ) serves
as a measure of local variability of a hidden field
X = (x
t
,t ∈ T ). As it can be seen from the criterion
(5),
ˆ
λ
t
′
,t
′
∈ T actually plays the role of a penalty for
the difference between values of two corresponding
neighboring variables x
g
t
′
and x
g
t
′′
, (t
′
,t
′′
) ∈ T . Thus,
Λ = (λ
t
,t ∈ T ), being estimated with the help of an
additional guided image, can be used to transfer the
structure of local relations between elements of the
guided image to the result of processing.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
506
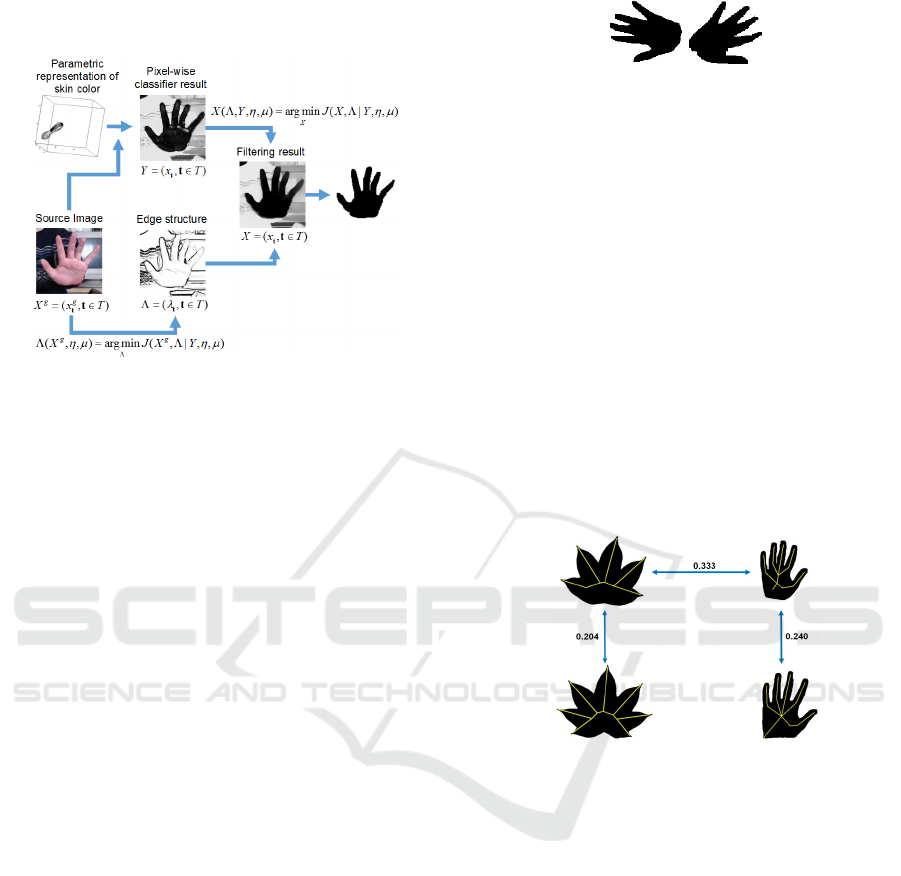
The general scheme of segmentation is shown in
Figure 4.
Figure 4: General scheme of probabilistic color segmenta-
tion.
Proposed procedure has approximately the same
computational time as Fast Guided Filter (He et al.,
2013) and has linear computational complexity with
respect to the number of pixels in the source image.
For the image segmentation task the initial image
plays the role of a “guide” image X
g
and the rough
output from the one-class classifier plays the role of
initial data Y . In addition, the concept of SVDD gives
the possibility to get fuzzy classification instead of bi-
nary one (see Figure 3). We use the distance from the
center of hypersphere in Hilbert space to the object
as the grade of membership in the class of interest.
Fuzzy classification lets us obtain more accurate de-
cision with the help of structure transferring filter, de-
scribed above.
4 HAND DETECTION BY THE
SKELETON MATCHING
Some regions of a binary image which are potentially
can be referred to as hands according to their empir-
ical features (such as geometrical characteristics, the
size which is proportional to a face size, and the filled-
in degree which is computed as the ratio of the num-
ber of black pixels to the size of the region) are pre-
sented for the skeleton matching procedure described
in (Kushnir and Seredin, 2015). This procedure com-
pares the skeleton of a candidate binary region with
the skeleton of the typical hand shape. So far as the
procedure is not invariant under reflection, we need to
choose two typical hand shapes – for the left and the
right hand (see Figure 5).
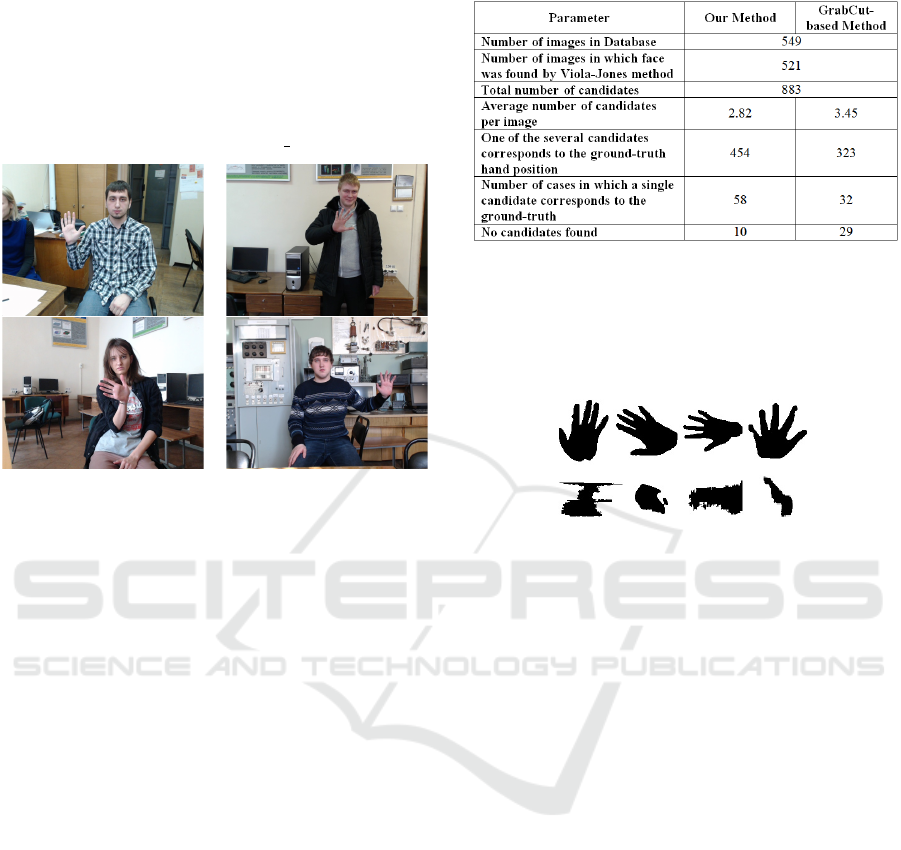
The skeletons of the typical left and right hands
are needed to calculate once before detection will
Figure 5: Shapes of the most typical left and right hands.
start. Then, the skeleton of a candidate region is cal-
culated. Each skeleton is transformed to the appropri-
ate for the matching form (so called ”base skeleton”)
by using pruning and approximation procedures (see
Figure 6). The matching procedure performs three
following steps:
1. each skeleton is coded by the sequence of primi-
tives (primitive chain); each primitive contains in-
formation about topological characteristics of the
corresponding skeleton edge (length, inner-angle
and radial function),
2. two primitive chains (belonging to the one of typ-
ical hands and candidate region respectively) are
aligned by dynamic programming procedure,
3. dissimilarity measure of primitive chains and,
consequently, corresponding skeletons, is calcu-
lated based on their optimal pair-wise alignment.
Figure 6: Examples of two classes of shapes, their base
skeletons and pair-wise dissimilarity measures.
Thus, the matching procedure produces the dis-
tance function of two variables which returns non-
negative dissimilarity measure between shapes. It is
expected that classification decision (left/right hand
or non-hand) could be made based on a simple thresh-
old decision rule applied to dissimilarity value be-
tween this region and the image of typical hand.
Therefore, it is important to choose typical images rel-
evant to the application. In our preliminary studies,
the procedure demonstrated a good processing time,
near 3-5 ms per one matching in ordinary PC.
5 EXPERIMENTAL STUDY
For experimental study of the proposed method
we collected a database of images gotten under
varying illumination conditions and in different
interiors. There is only one person with clearly
Background-Invariant Robust Hand Detection based on Probabilistic One-Class Color Segmentation and Skeleton Matching
507
visible hand(s) in each image. The hand and the face
bounding boxes have no intersections (see examples
in Figure 7). Total number of images in the database
is 549. For the each image ground-truth hand(s)
location was determined by expert and marked
with four points which are the corners of corre-
sponding bounding box. The database is available on
http://lda.tsu.tula.ru/papers/TulaSU HandsDetDB.zip.
Figure 7: Examples of images used in experimental study.
On the first stage of experimental study we evalu-
ated the segmentation quality of the algorithms pro-
posed in Sections 2 and 3. The main goal was to
figure out whether the segmentation method capable
to detect candidates for the further comparison with
the most typical hands shapes. As shown on Table 1,
for the most of images, in which a face was detected
(we used parameter NeighborFaces=9 in OpenCV re-
alization of Viola-Jones algorithm), our segmentation
method had found image fragment which corresponds
to the ground-truth hand position; in 58 cases the only
one candidate corresponds to the hand position. De-
cision about correspondence of candidate fragment to
the ground-truth fragment was made if intersection of
their bounding boxes was greater than 50%.
We have compared our segmentation method
with well-known GrabCut method (Boykov and Kol-
mogorov, 2004) based on graph cuts and MRF op-
timization. To make a comparison more correct we
have replaced Gaussian Mixture Models which were
utilized in the paper for background and foreground
representation, by our one-class classifier.
Average computational time per image for seg-
mentation algorithms running in MATLAB environ-
ment was 1.3 sec for graph cuts based optimization
method and 0.3 sec for our method on the basis of
gamma-normal probabilistic model.
The examples of candidate fragments are shown
in Figure 8. All objects-candidates were separated
by expert into three categories: “left hands” (173 in-
stances), “right hands” (117), and “non-hands” (593).
Table 1: Segmentation quality.
Moreover, two most typical hands (the left and the
right) were chosen (see Figure 5). We estimated qual-
ity of skeleton matching algorithm (Section 4) by
analyzing distances between objects-candidates ob-
tained by segmentation procedure and two most typi-
cal hands (the left and the right).
Figure 8: Examples of objects-candidates, which are similar
to human hand (top) and are not similar (bottom).
In Figure 9 we have a projection of whole dis-
tance matrix (883 x 883) on two-dimensional space.
The first feature is the distance to the most typical
left hand (horizontal axis) and the second one is the
distance to the most typical right hand (vertical axis).
Therefore, the “left hands” are the green rhombuses,
“right hands” are the red squares and the non-hands
are the black triangles. The chart displays that the
compactness hypothesis for the three classes holds
true. It allows us to build hand detection system us-
ing simple threshold rule based on the distance to the
most typical objects.
Quality of separation of hands from non-hands in
the form of ROC-curves is shown in Figure 10. These
curves demonstrate the true positive against false pos-
itive rate at the increasing of distance function from
the chosen typical objects. The AUC (area under the
curve) for left hands (green curve) is equal to 0.9535,
and for right hands (red curve) is 0.9531.
6 CONCLUSION
Hand detection is rather complex problem and re-
quires a combination of different methods and algo-
rithms for reliable solution. Proposed method consists
in three major stages: face detection and one-class
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
508
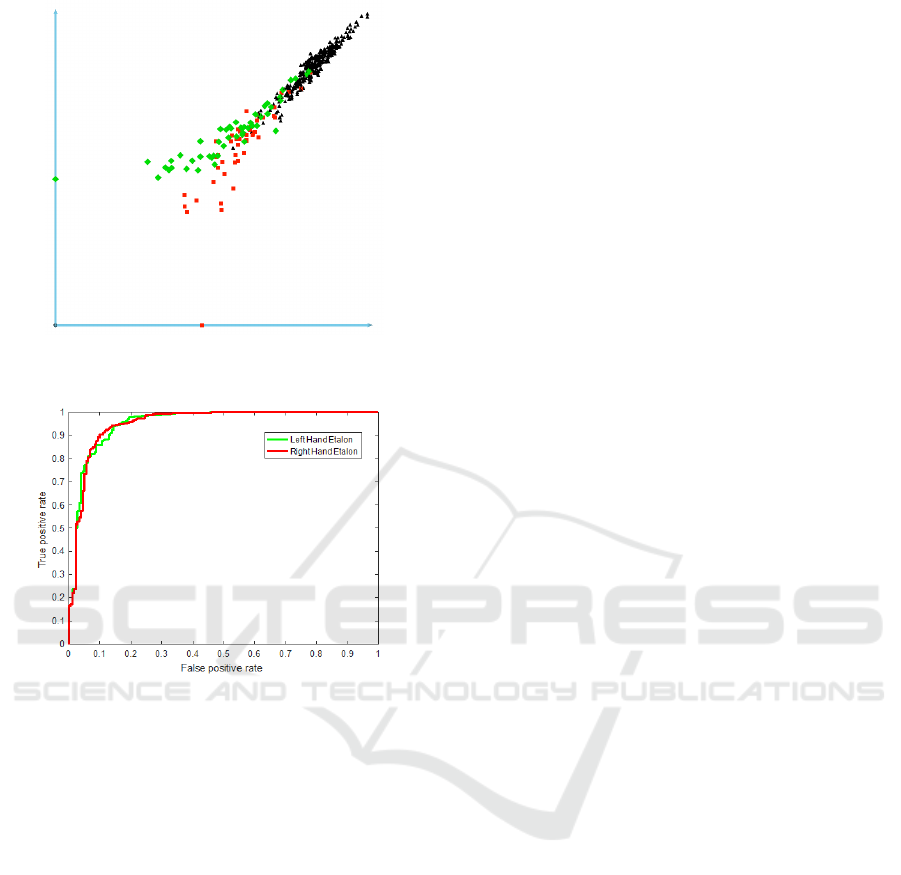
Figure 9: The distances to the most typical left hand (hori-
zontal axis) and right hand (vertical axis).
Figure 10: ROC-curves built at the distance function from
the most typical left (green) and right hand (red).
classifier training, segmentation of skin-colored re-
gions and comparison of hand-candidate shapes with
the most typical hand objects.
The main advantage of the method is invariance
to illumination conditions, personal skin color speci-
ficity, hand rotation and scale. Additionally, no image
background model is used which makes our method
performing robust in complex or varying scenes. Our
method allows fast recalculating of the skin color
model by using information just from the small frag-
ment of face. The new method of probabilistic seg-
mentation based on one-class color classifier and the
structure-transferring filter was built on probabilistic
gamma-normal model. It allows reducing the num-
ber of candidates for the shape matching procedure.
Rotating/scaling-invariant matching algorithm based
on skeleton primitive chains alignment performs very
fast and obtains reliable classification results.
We have paid special attention to low computa-
tional time of constituent algorithms. Thereby, our
method could be implemented in real-time and ap-
plied to hand detection in video streams. However,
no temporal inter-frame relations are taking into ac-
count so far, that could be a subject for future work.
The experimental study demonstrates robustness and
precision of proposed hand detection method.
ACKNOWLEDGEMENTS
This work is supported by the Russian Fund for Ba-
sic Research, grants 16-57-52042, 16-07-01039. The
results of the research project are published with the
financial support of Tula State University within the
framework of the scientific project No 2017-20PUBL.
REFERENCES
Argyros, A. A. and Lourakis, M. I. (2006). Vision-based
interpretation of hand gestures for remote control of
a computer mouse. Computer Vision in Human-
Computer Interaction, 3979 LNCS:40–51.
Bali, A. and Singh, S. N. (2015). A review on the strategies
and techniques of image segmentation. 2015 Fifth In-
ternational Conference on Advanced Computing and
Communication Technologies, pages 113–120.
Benezeth, Y., Jodoin, P., Emile, B., Laurent, H., and
Rosenberger, C. (2008). Review and evaluation of
commonly-implemented background subtraction al-
gorithms. 19th ICPR, pages 1–4.
Bowden, R. (2004). A boosted classifier tree for hand shape
detection. Sixth IEEE International Conference on
Automatic Face and Gesture Recognition, 2004. Pro-
ceedings, pages 889–894.
Boykov, Y. and Kolmogorov, V. (2004). An experi-
mental comparison of min-cut/max-flow algorithms
for energy minimization in vision. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
26(9):1124–1137.
Crowley, J., Berard, F., and Coutaz, J. (1995). Finger track-
ing as an input device for augmented reality. Interna-
tional Workshop on ldots, (June):1–8.
Degtyarev, N. and Seredin, O. (2010). Comparative
testing of face detection algorithms. International
Conference on Image and Signal Processing, 6134
LNCS:200–209.
Fang, Y., Wang, K., Cheng, J., and Lu, H. (2007). A real-
time hand gesture recognition method. Multimedia
and Expo, 2007 IEEE International Conference on,
pages 995–998.
Francke, H., Ruiz-del Solar, J., and Verschae, R. (2007).
Real-time hand gesture detection and recognition us-
ing boosted classifiers and active learning. Advances
in Image and Video Technology, pages 533–547.
Fritsch, J., Lang, S., Kleinehagenbrock, M., Fink, G. A.,
and Sagerer, G. (2002). Improving adaptive skin color
Background-Invariant Robust Hand Detection based on Probabilistic One-Class Color Segmentation and Skeleton Matching
509

segmentation by incorporating results from face de-
tection. IEEE International Workshop on Robot and
Human Interactive Communication, pages 337–343.
Gracheva, I. and Kopylov, A. (2017). Image processing al-
gorithms with structure transferring properties on the
basis of gamma-normal model. Communications in
Computer and Information Science, 661:257–268.
Gracheva, I., Kopylov, A., and Krasotkina, O. (2015). Fast
global image denoising algorithm on the basis of non-
stationary gamma-normal statistical model. Com-
munications in Computer and Information Science,
542:71–82.
Hassanpour, R., Shahbahrami, A., and Wong, S. (2008).
Adaptive gaussian mixture model for skin color seg-
mentation. World Academy of Science, Engineering
and Technology, 31(July):1–6.
He, K., Sun, J., and Tang, X. (2013). Guided image filtering.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 35(6):1397–1409.
Hikal, N. A. and Kountchev, R. (2011). Skin color segmen-
tation using adaptive pca and modified elliptic bound-
ary model. Advanced Computer Science and Infor-
mation System (ICACSIS), 2011 International Confer-
ence, pages 407–412.
Hsieh, C. C., Liou, D. H., and Lai, W. R. (2012). Enhanced
face-based adaptive skin color model. Journal of Ap-
plied Science and Engineering, 15(2):167–176.
Jones, M. and Viola, P. (2003). Fast multi-view face detec-
tion. Mitsubishi Electric Research Lab TR2000396,
(July).
Jones, M. J. and Rehg, J. M. (2002). Statistical color mod-
els with application to skin detection. International
Journal of Computer Vision, 46(1):81–96.
Junqiu, W. and Yagi, Y. (2008). Integrating color and shape-
texture features for adaptive real-time object tracking.
IEEE Transactions on Image Processing, 2(17):235–
240.
Kakumanu, P., Makrogiannis, S., and Bourbakis, N. (2007).
A survey of skin-color modeling and detection meth-
ods. Pattern Recognition, 40(3):1106–1122.
Kim, K., Chalidabhongse, T. H., Harwood, D., and Davis,
L. (2005). Real-time foreground-background segmen-
tation using codebook model. Real-Time Imaging,
11(3):172–185.
Krasotkina, O., Kopylov, A., Mottl, V., and Markov, M.
(2010). Bayesian estimation of time-varying regres-
sion with changing time-volatility for detection of hid-
den events in non-stationary signals. 7th IASTED In-
ternational Conference on Signal Processing, Pattern
Recognition and Applications, pages 8–15.
Kushnir, O. and Seredin, O. (2015). Shape matching based
on skeletonization and alignment of primitive chains.
Communications in Computer and Information Sci-
ence, 542:123–136.
Larin, A., Seredin, O., Kopylov, A., Kuo, S. Y., Huang,
S. C., and Chen, B. H. (2014). Parametric represen-
tation of ob jects in color space using oneclass clas-
sifiers. International Workshop on Machine Learn-
ing and Data Mining in Pattern Recognition. Springer,
Cham., pages 300–314.
Mottl, V. and Blinov, A. (1998). Optimization techniques
on pixel neighborhood graphs for image processing.
Graph-Based Representations in Pattern Recognition,
12(Computing. Supplement, 0344-8029):135–145.
Oka, K., Sato, Y., and Koike, H. (2002). Real-time finger-
tip tracking and gesture recognition. IEEE Computer
Graphics and Applications, 22(6):64–71.
Petschnigg, G., Szeliski, R., Agrawala, M., Cohen, M.,
Hoppe, H., and Toyama, K. (2004). Digital photogra-
phy with flash and no-flash image pairs. ACM Trans-
actions on Graphics, 23(3):664.
Phung, S., Bouzerdoum, A., and Chai, D. (2005). Skin
segmentation using color pixel classification: analy-
sis and comparison. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 27(1):148–154.
Piccardi, M. (2004). Background subtraction tech-
niques: a review. 2004 IEEE International Confer-
ence on Systems, Man and Cybernetics (IEEE Cat.
No.04CH37583), 4:3099–3104.
Rehg, J. and Kanade, T. (1995). Model-based tracking
of self-occluding articulated objects. Proceedings of
IEEE International Conference on Computer Vision,
pages 612–617.
Sabeti, L. and Wu, Q. M. J. (2007). High-speed skin color
segmentation for real-time human tracking. 2007
IEEE International Conference on Systems, Man and
Cybernetics, pages 2378–2382.
Shiravandi, S., Rahmati, M., and Mahmoudi, F. (2013).
Hand gestures recognition using dynamic bayesian
networks. 2013 3rd Joint Conference of AI and
Robotics and 5th RoboCup Iran Open International
Symposium, pages 1–6.
Suarez, J. and Murphy, R. R. (2012). Hand gesture recog-
nition with depth images: A review. Ro-Man, 2012
Ieee, pages 411–417.
Tax, D. M. J. and Duin, R. P. W. (2004). Support vector data
description. Machine Learning , 54(1):45–66.
Vezhnevets, V., Sazonov, V., and Andreeva, A. (2003). A
survey on pixel-based skin color detection techniques.
Proceedings of GraphiCon 2003, 85(0896-6273 SB -
IM):85–92.
Wimmer, F. and Munchen (2005). Adaptive skin color
classificator. Proc. of the first ICGST International
Conference on Graphics Vision and Image Processing
GVIP-05, (December):324–327.
Zhang, J., Cao, Y., and Wang, Z. (2014). A new image filter-
ing method: Nonlocal image guided averaging. 2014
IEEE International Conference on Acoustics, Speech
and Signal Processing (ICASSP), (2012):2479–2483.
Zhu, Y., Yang, Z., and Yuan, B. (2013). Vision based hand
gesture recognition. Service Sciences (ICSS), 2013 In-
ternational Conference on, 3(1):260–265.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
510
