
Self-Learning 3D Object Classification
Jens Garstka and Gabriele Peters
Human-Computer Interaction, Faculty of Mathematics and Computer Science,
FernUniversitt in Hagen - University of Hagen, D-58084 Hagen, Germany
Keywords:
Active Vision, Active Learning, Object Classification, 3D Feature Descriptors, Reinforcement Learning.
Abstract:
We present a self-learning approach to object classification from 3D point clouds. Existing 3D feature descrip-
tors have been utilized successfully for 3D point cloud classification. But there is not a single best descriptor
for any situation. We extend a well-tried 3D object classification pipeline based on local 3D feature descrip-
tors by a reinforcement learning approach that learns strategies to select point cloud descriptors depending
on qualities of the point cloud to be classified. The reinforcement learning framework learns autonomously
a strategy to select feature descriptors from a provided set of descriptors and to apply them successively for
an optimal classification result. Extensive experiments on more than 200.000 3D point clouds yielded higher
classification rates with partly more reliable results than a single descriptor setting. Furthermore, our approach
proved to be able to preserve classification strategies that have been learned so far while integrating additional
descriptors in an ongoing classification process.
1 INTRODUCTION
An important step towards an effective scene under-
standing is a reliable object classification. A central
requirement for classification algorithms is their in-
variance to varying conditions such as location, scale,
pose, partial occlusion, or lighting conditions. The
basic approaches to extract useful information from
images for either object recognition or classification
are similar and there are a lot of surveys available(Sun
et al., 2006; Li and Allinson, 2008; Andreopoulos and
Tsotsos, 2013; Loncomilla et al., 2016).
While initially the application scenarios had a
strong focus on facial recognition, the spectrum be-
came significantly more diverse with the introduc-
tion of reliable local 2D feature descriptors. Finally,
due to the results of deep convolutional neural net-
works (Ciresan et al., 2012), the research in this area
received new impetus that continues to the present
day. However, there are some cases in which the pre-
viously mentioned image-based approaches to object
classification do not work properly on principle. This
applies to situations where no structured image infor-
mation is available, e.g., when the lighting is insuffi-
cient or the objects are monochrome and due to their
shape without sufficient shading. Figure 1 shows two
examples that reflect such situations, where additional
3D information in form of 3D point clouds could help
to improve object classification.
Figure 1: Examples of objects where a classification solely
on the basis of color information could be difficult.
(left image: Francis Tiangson, Pinterest).
In this work we present an approach to object clas-
sification based on local feature descriptors for 3D
point clouds. Particularly, the focus is not on a sin-
gle local 3D feature descriptor, since the 3D object
classification results of any single descriptor vary a lot
depending on the density and structure of a 3D point
cloud. Instead, the approach presented is essentially
based on a machine learning method. We use a re-
inforcement learning framework to adaptively select
and apply different 3D feature descriptors depending
on the 3D point cloud to be classified. This leads to
a clear improvement of the classification results com-
pared to the use of single local 3D feature descriptors
only. The paper is divided into the following sections:
Garstka, J. and Peters, G.
Self-Learning 3D Object Classification.
DOI: 10.5220/0006649905110519
In Proceedings of the 7th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2018), pages 511-519
ISBN: 978-989-758-276-9
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
511

Section 2 provides an overview of the methods rele-
vant in the context of this work. Section 3 introduces
our proposed approach and describes its components
in detail. Section 4 describes the experiments and in-
termediate results. The final 3D object classification
results are summarized in Section 5. Finally, Sec-
tion 6 provides an outlook to future extensions and
adaptations of the presented approach. The approach
proposed in this work including all parameters of the
model and extended experiments are described in de-
tail in (Garstka, 2016).
2 RELATED WORK
This section starts with a brief overview of related
keypoint detectors (subsection 2.1) and local 3D fea-
ture descriptors for 3D point clouds (subsection 2.2).
The majority of currently available algorithms for
keypoint detection and local 3D feature descriptors
are summarized in a survey of 3D object recogni-
tion methods by (Guo et al., 2014). Thus, only algo-
rithms and approaches that are relevant for our work
are quoted below. This is followed by a subsection
on classification approaches for 3D point clouds (sub-
section 2.3) and a short introduction of Q-Learning as
a reinforcement learning technique we utilize for our
approach (subsection 2.4).
2.1 Keypoint Detectors
Computational costs of local 3D feature descriptors
are mostly high. It does not make sense to compute
feature vectors for all points of a point cloud. We use a
keypoint detector to reduce the number of feature vec-
tors. Based on the evaluations of (Salti et al., 2011)
and (Filipe and Alexandre, 2014) we use the keypoint
detector introduced in context of the shape signature
feature descriptor (ISS) by (Zhong, 2009).
2.2 Local 3D Feature Descriptors
In this subsection, we give an overview of those lo-
cal 3D feature descriptors used in the context of this
work. In short, we use five local 3D feature descrip-
tors for 3D point clouds: The spin image (SI) intro-
duced by (Johnson and Hebert, 1998) is a 2D his-
togram that is rotated around the normal vector of
a point. The point feature histogram (PFH) and the
fast point feature histogram (FPFH) collect informa-
tion from a local environment based on the so-called
Darbeaux frame. Both were introduced by (Rusu
et al., 2008). The signature of histograms of orien-
tations (SHOT) by (Tombari et al., 2010b) is a set
of histograms of angles determined for multiple seg-
ments of a spherical environment. The values of these
histograms are concatenated to a signature. And fi-
nally the unique shape context (USC) by (Tombari
et al., 2010a), which is a normal aligned spherical
histogram. These local 3D feature descriptors have
been selected because of their broad spectrum of dif-
ferent properties. Two approaches, SI and USC use
histograms, PFH and FPFH create signatures using
surface properties and SHOT is a hybrid solution of
histograms and surface properties. The dimensions of
the feature descriptions should cover the largest pos-
sible range, from FPFH with 33 dimensions to USC
with 1960 dimensions. In the same way the speed of
the descriptors should cover a large range, from SI,
which is the fastest to PFH which is more than 1000
times slower. Finally, three of the descriptors require
a local reference frame (SHOT, SI, and USC) and the
others do not (FPFH and PFH).
2.3 3D Classification Approaches
A common way to classify an object based on a
given set of local feature descriptions consists of two
steps. The first step is inspired by text categoriza-
tion approaches, e.g., (Joachims, 1998). This so-
called bag-of-words representation has become an el-
igible method for categorizing visual content. An
early approach is the visual categorization with bags
of keypoints (Csurka et al., 2004). The basic ap-
proach consists of mapping high-dimensional vectors,
whose values are usually continuous, to a finite set
of quantized representatives. These representatives
form the so-called visual vocabulary. A histogram
in the same size as the vocabulary is used to count the
mapped feature descriptions and is called frequency
histogram. Therefore, the method is often referred to
as a bag-of-features in this context. In a second step
these frequency histograms are used as input vectors
for classifiers. Support vector machines (SVM) are
often used as a classifier. Primarily, SVMs are binary
classifiers. Therefore, each object class requires its
own SVM. The frequency histogram is then applied
separately to the SVM of each object class. There are
numerous approaches that follow this basic principle,
e.g., (Madry et al., 2012; Yang et al., 2014).
2.4 Reinforcement Learning –
Q-Learning
A reinforcement learning (RL) system consists of an
agent that interacts with an environment. Based on the
current state s
t
of the environment at time t the agent
decides with respect to the learned experience what
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
512

action a
t
will be performed next. The experience
arises from consequences the agent undergoes within
the environment, i.e., a positive or negative reward
r
t+1
, which reflects whether the action a
t
was appro-
priate to bring the agent closer to its goal (Sutton and
Barto, 1998). Q-learning (Watkins and Dayan, 1992)
is an algorithm to solve the reinforcement problem
for a finite number of discrete states of a fully ob-
servable environment. It determines values which de-
scribe the quality of an action a ∈ A(s) for a state
s ∈ S . These so-called Q-values can be used for a
mapping π called policy between the current state and
the next action. Q-learning updates its Q-values using
action a
t
in state s
t
at time t while observing Q-values
of the next state s
t+1
and the immediate reward r
t+1
:
Q(s
t
,a
t
) = Q(s
t
,a
t
)+
α
h
r
t+1
+ γ max
a
Q(s
t+1
,a) −Q(s
t
,a
t
)
i
,
(1)
where α is a parameter that controls the learning rate
and γ is the discount rate with 0 ≤ γ ≤ 1. The lat-
ter determines how strongly immediate rewards are
weighted compared to future rewards. In this way the
return, i.e., the total discount of future rewards, for
state-action pairs is estimated. Initially, all Q-values
are initialized with a constant value, typically zero.
In this phase, the Q-values cannot be used for deci-
sions. Therefore, the actions are typically selected
randomly with a probability ε = 1.0. Or in other
words: the RL agent follows a random policy. This
phase is called exploration phase. As soon as the
Q values get more stable, the portion of randomly
selected actions ε is successively reduced. This is
the transition to the exploitation phase where the RL
agent follows a so-called ε-greedy policy. As long as
ε 6= 0, Q-learning can react to changes in the behav-
ior of the environment and makes adjustments to the
Q-values. Q-learning is proven to converge to an op-
timal value, which means that the best possible way
to solve a given task can be dictated by taking actions
greedily with respect to the learned Q-values (greedy-
policy) (Watkins and Dayan, 1992).
3 METHODS
In our approach several local 3D feature descriptors
are autonomously selected and applied to a 3D point
cloud to be classified. This is not achieved by a one-
time optimization of the classification pipeline but by
a continuous learning process, which has been imple-
mented in the form of a RL framework (Sutton and
Barto, 1998). The basic structure of the classifica-
tion pipeline is presented in Subsection 3.1 and is ex-
tended with the RL framework as described in Sub-
section 3.3. Subsection 3.4 shows how the adaptive-
ness of Q-learning is adopted to add local 3D point
cloud descriptors dynamically during ongoing classi-
fication processes.
3.1 Classification Pipeline
The structure of the basic classification pipeline is
schematically shown in Figure 2. Within this pipeline
some parameters have to be defined in advance. We
take these parameters from an evaluation described
in (Garstka and Peters, 2016). The dataset used in the
Keypoint
Detection
Point Cloud
Feature
Description
Bag of
Features
Vocabulary
SVMs
Classiଏca-
tion
v o e t
Figure 2: The structure of the basic classification pipeline,
which is extended later by a RL approach.
context of this work is the RGB-D Object Dataset of
the University of Washington (Lai et al., 2011). The
dataset contains 51 object classes with 300 different
objects where each object was captured in different
poses, resulting in 207841 distinct point clouds, or
approximately 4000 point clouds per object class on
average. We use only the 3D point cloud data of the
dataset for our experiments. Apart from the complete
set of 3D point clouds, we also use a reduced set of
3D point clouds, which only consists of 10 of the 51
object classes (see Figure 3).
Figure 3: One view of one object for each of the 10 se-
lected object classes. These are left to right, top to bottom:
cap, coffee mug, food bag, greens, hand towel, keyboard,
kleenex, notebook, pitcher, and shampoo.
The classification pipeline starts with a keypoint
detection algorithm. As already noted in Section 2.1,
we use the ISS keypoint algorithm introduced by
Zhong. The average number of keypoints determined
by ISS on the given set of point clouds is approx. 131.
In the second step the basic classification pipeline
continues with the computation of a local 3D feature
description at each keypoint. The descriptors used
have been presented in Section 2.2. Next, the cal-
culated feature descriptions are sorted into the bag of
features frequency histogram. Beforehand, the num-
ber of visual words of the vocabulary, i.e., the num-
Self-Learning 3D Object Classification
513

Keypoint
Detection
Point Cloud
Feature
Description
Bag of
Features
Vocabulary
SVMs
Classifica-
tion
Environment
Agent
State
Actions
3D Feature
Descriptors
Class-Candidates
Policy
Q-Table Update Q-Table
reward -1,[0,3[
new state
action
Class-Candidates
Cloud-Properties
Compute
Properties
Figure 4: Extension of the classification pipeline with a RL framework.
ber of bins of the frequency histogram, has to be de-
fined. Within the scope of preceding evaluations we
obtained best results with vocabulary sizes of 50 for
SI, 100 for PFH, FPFH and SHOT, and 200 for USC,
which are also used for the experiments described in
Section 4. The vocabulary is determined using k-
means++ (Arthur and Vassilvitskii, 2007) with an Eu-
clidean distance.
The last step of the pipeline is the classification.
Each object class is bound to a set of corresponding
SVMs, one for each local 3D feature descriptor. The
kernel function used in SVMs is a Gaussian radial ba-
sis function. The best parameter values are taken from
an evaluation described in (Garstka and Peters, 2016)
quoted above: the kernel parameter γ = 0.008 and the
SVM penalty parameter C = 125. All SVMs have
been trained using every second point cloud of the
corresponding object class as positive example, which
are ≈ 2000 3D point clouds. The double amount of
≈ 4000 randomly selected 3D point clouds from all
other object classes have been used as negative exam-
ples.
3.2 Reference Values
In order to obtain an average classification rate for
each local 3D feature descriptor, the basic classifi-
cation pipeline has been applied for each local 3D
feature descriptor separately to all 3D point clouds,
which were not used for the training of the SVMs.
In the following this setting is referred to as single
descriptor setting. The results can be divided into 3
cases:
1. Exactly for one object class the prediction value
of its SVM is positive, and it is the correct object
class. This case is hereinafter referred to as an
exact match.
2. For several object classes the prediction values of
their SVMs are positive, but the object class the
SVM of which has the highest prediction value
corresponds to the correct object class. The latter
will be hereinafter referred to as the best match.
3. In all other situations the classification fails.
The assignment rates from the first and second case
are summarized as classification rate. Table 1 shows
the classification rates of all individual local 3D fea-
ture descriptors while performing the described ba-
sic classification pipeline. These values serve as ref-
erence values for the subsequent extension of the
pipeline with the RL framework. The parameters re-
quired for each local 3D feature descriptor were taken
from the respective original publication for each de-
scriptor and from the evaluation described in (Garstka
and Peters, 2016). In the single descriptor setting the
Table 1: Classification rates in the single descriptor setting.
The results shown have been obtained for each local 3D fea-
ture descriptor applied separately, on the one hand applying
the basic pipeline on all 51 object classes, on the other hand
only on the reduced set of 10 object classes.
classification rate for
51 classes 10 classes
descriptor
SI 7.4% 23.8%
PFH 6.0% 62.9%
FPFH 9.4% 65.0%
SHOT 3.6% 22.8%
USC 8.5% 59.7%
portion of the exact class assignments (case 1 of the
previously described three cases) among the classifi-
cation rates is 0% in all cases.
3.3 Reinforcement Learning
Framework
The extension of the basic classification pipeline with
a RL approach is illustrated in Figure 4 and described
in Subsubsection 3.3.1 to 3.3.3. To extend the basic
classification pipeline with a RL approach the gen-
eral proceeding is as follows: Beginning with a 3D
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
514

point cloud, the first step of the basic pipeline, i.e., the
recognition of the keypoints, is performed. Next, the
feature descriptions are determined at each keypoint.
Instead of using a single descriptor, the RL agent se-
lects one of the available descriptors to determine the
feature descriptions. Then the remaining two steps
of the pipeline are executed for the selected descrip-
tor. Once the prediction value of the SVM of the re-
spective descriptor corresponding to each object class
has been determined, all object classes with a neg-
ative prediction value are excluded. The remaining
classes are hereinafter referred to as class candidates.
The further procedure depends primarily on the set of
class candidates. If it contains more than one object
class, the classification pipeline resumes at the second
step. In this case, the RL agent selects another unused
descriptor with which new feature descriptions are de-
termined at the already detected keypoints. Then the
remaining steps of the pipeline are executed again.
The new prediction values corresponding to the re-
maining classes are used to further reduce the class
candidates. After a few iterations this process ideally
ends up with the one matching object class remain-
ing. However, due to the similarity of many object
classes, this will rarely be the case. To prevent the se-
lection of all feature descriptors during each classifi-
cation, a restriction of computation time is introduced.
As soon as the time limit is exceeded the object class
with the highest prediction value within the remain-
ing class candidates is returned as best matching ob-
ject class. The implementation of these concepts, the
components, and parameters are described in detail in
the following.
3.3.1 Basic Components of the Framework
The environment of the RL framework is defined by
the set of class candidates, which at the beginning
contains all object classes and additional properties of
the input point cloud (see Figure 4). The point cloud
properties and their associated discrete values are:
1. The number of keypoints relative to all objects:
1st quartile: → slight structure → 1
2nd, 3rd quartile: → medium structure → 2
4th quartile: → considerable structure → 3
2. The ratio between the two successive eigenvalues
of the covariance matrix of the point cloud, r
1
=
e
2
/e
1
and r
2
= e
3
/e
2
, where e
1
≤ e
2
≤ e
3
:
r
1
≤ 3.0 ∧ r
2
≤ 3.0 → uniform, not flat → 1
r
1
≤ 3.0 ∧ r
2
> 3.0 → elongated, not flat → 2
r
1
> 3.0 ∧ r
2
≤ 3.0 → uniform and flat → 3
r
1
> 3.0 ∧ r
2
> 3.0 → elongated and flat → 4
The RL agent knows the current state of the environ-
ment, i.e., the class candidates and the point cloud
properties. Based on the state the agent can perform
an action, i.e., the selection of a local 3D feature de-
scriptor the agent has not yet applied. The agent needs
a policy to decide which descriptor should be selected
next in the current state. When using Q-learning, poli-
cies are usually based on the so-called Q-table, which
contains a value for each pair of state and action that
reflects how suitable an action is in a given state. Un-
der the assumption that the Q-table contains only op-
timal Q-values, the agent selects the best local 3D
feature descriptor for the current state based on the
values of the Q-table. The selected descriptor leads
to a change of the environment, i.e., a reduced set of
class candidates. As the Q-table is initially empty, it
is build up successively during the classification.
3.3.2 Terminal States and Rewards
The learning mechanism of RL is based on rewards.
In general, a reward can be given for each action a
in a state s. However, in the context of our classifi-
cation framework a decision on the success of a clas-
sification is possible only after the classification pro-
cess is terminated. Therefore, all possible terminal
states have to be defined first (see Table 2). An ’exact
Table 2: Summary of rewards for terminal states in our RL
framework. C is the set of class candidates, n
C
the number
of all object classes, t the computation time required to get
a result, and t
max
the time limit.
name reward
terminal state
1) exact match 3.0 −t/t
max
2a) no actions/match 2.0 − |C |/n
C
2b) no actions/miss 1.0 − |C |/n
C
3a) timeout/match 2.0 − |C |/n
C
3b) timeout/miss 1.0 − |C |/n
C
4) fail state −1.0
match’ means that the set of remaining class candi-
dates contains only the correct object class while no
timeout occurred. In case of the two terminal states
distinguished for ’no actions’ no local 3D feature de-
scriptor is left to select, while in case of the two ter-
minal states distinguished for ’timeout’ the compu-
tation time limit is exceeded. In both cases ’match’
means that the best matching class is the correct ob-
ject class while ’miss’ means that the best matching
class is an incorrect object class. The fourth case ’fail
state’ comprises all cases that are not covered by the
previously stated cases, such as the case that the set of
remaining class candidates does not contain the cor-
rect object class while there are still descriptors left
to be selected and no timeout occurred. For 2a) and
3a) the best matching object class is determined from
the set of class candidates by the highest sum of the
Self-Learning 3D Object Classification
515

prediction values over all iterations. In our approach
only terminal states allow a statement of success or
failure. Thus, all other rewards r are initially set to
a value of 0. The rewards for the six cases described
above are shown in Table 2.
3.3.3 Time Constraint
As already pointed out, a time constraint is set to pre-
vent the successive application of all available local
3D feature descriptors during a classification. The
motivation is that the average computing times for
each descriptor measured separately should fit into the
preset time interval, while at the same time it should
not be possible to apply the whole set of available de-
scriptors within this interval. Table 3 contains the av-
erage computation time of each local 3D feature de-
scriptor per keypoint in milliseconds and the average
computation time for a whole object assuming an av-
erage number of 131 keypoints per object. Based on
these results, a value of 10 seconds was set as a limit
for all subsequent experiments.
Table 3: Average computation times (Intel Xeon E5630
CPU) for each used descriptor. For the third column an av-
erage number of 131 keypoints per object is assumed.
comp. time: t(ms)/keypoint t(s)/object
descriptor
SI 0.0449 < 0.01
PFH 64.5 8.45
FPFH 6.69 0.88
SHOT 0.282 0.04
USC 9.95 1.30
3.3.4 Exploration and Exploitation
At the beginning the Q-table is initialized with zero
values. During the exploration phase the values of
the Q-table converge. In the course of the learning
process first the portion of random actions ε is kept
at 1.0, but the learning rate α is slowly reduced to a
value of 0.001. Then it is, together with the portion ε
of randomly selected actions continuously reduced to
a value of 0.0 (exploitation phase). In practical terms
the exploration phase consists of a total of 100 million
classifications reducing the learning rate α beginning
with the 60 millionth classification. After 90 million
classifications the random portion ε is also reduced.
3.4 Adaptiveness
As already pointed out in Subsection 2.4 a special
property of Q-learning is its support of on-line learn-
ing. Under the assumption α > 0 and ε > 0, Q-
learning can react to changes in the environment by
adjusting the Q-table continuously. We exploit this
property to dynamically add new local 3D feature
descriptors during ongoing classification processes.
This enhances the flexibility of a 3D object classifica-
tion system considerably, since the strategies to clas-
sify objects that have been learned so far, can be pre-
served and exploited by dynamically adapting them,
integrating new descriptors smoothly in the classifi-
cation process. For this purpose we include com-
plete classifications of known objects with probability
ε while using a random-policy.
4 EXPERIMENTS AND
INTERMEDIATE RESULTS
The main focus of this section lies on the experiments
and their intermediate results. Subsection 4.1 con-
tains a figure to illustrate how the values of the Q-
table converge during the learning process. The fi-
nal 3D object classification rates that can be achieved
with our proposed approach are given in Subsec-
tion 4.2. They are summarized well-arranged later in
Section 5. Finally, the adaptiveness of our approach is
examined in experiments described in Subsection 4.3.
The following applies to all illustrations: the dot-
ted blue line illustrates the learning rate α, while the
dashed blue line corresponds to the value of ε.
4.1 Exploration Phase
Figure 5 shows the development of the average of
all Q-values, depending on the number of performed
episodes. It takes a few million classifications until
the value gradually reaches its maximum. However,
when the learning rate α is slowly decreased from the
60 millionth classification on, it is obvious that the
quality of many state-action pairs has been overesti-
mated so that the average Q-value now declines until
it slowly converges to a stable value.
4.2 Distribution of Terminal States
Figure 6 shows the distribution of the terminal states
that is obtained on the full set of 51 object classes.
For a better illustration, only the interval from 80 mil-
lion to 100 million classifications is displayed. The
colored curves represent the percentages of the termi-
nal states as introduced in Section 3.3.2 with the ex-
ception of fail states. In addition, the red curve sum-
marizes all positive results, i.e., those results that re-
turned a correct object class in one or another way. It
is the sum of the results for the terminal states ’ex-
act match’, ’no actions/match’, and ’timeout/match’.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
516

0 20 40 60 80 100
6
10×
avg. Q-value
0.0005
0.001
0.0015
0.002
0.0025
0.003
0.0035
0.004
0.0045
average Q-values
episodes
0 20 40 60 80 100
6
10×
alpha/epsilon
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
average Q-values
alpha
epsilon
Figure 5: This graph shows the development of the average
Q-value during the exploration phase of the RL framework
depending on the number of episodes carried out.
The value of the red curve after the final episode thus
represents the final classification results of our RL
approach in the setting of 51 object classes. The fi-
80 85 90 95 100
6
10×
% of terminal states
distribution of terminal states
episodes
80 85 90 95 100
6
10×
alpha/epsilon
timeout/match
timeout/miss
exact match
no actions/match
no actions/miss
sum positive
0.3
0.2
0.1
0
30
20
10
Figure 6: This figure shows the distribution of the terminal
states obtained on the full set of 51 object classes depend-
ing on the number of performed episodes. The red curve
represents correct 3D object classifications. By reducing α
and ε to a value of zero, the final results of the last episode
are based on a greedy policy and represent the best, learned
strategy to select the descriptors for 3D object classification.
nal distribution of the terminal states after the last
episode, represented by the endpoints of the curves
shown in Figure 6, is summarized in Table 4, sup-
plemented by the percentage of fail states. This table
also contains the results for the reduced set of 10 ob-
ject classes.
4.3 Adaptive Learning
To explore the adaptiveness of the RL framework, we
perform similar experiments as described in the sub-
sections before. The difference, however, is that the
learning process is started with a reduced set of only
four of five local 3D feature descriptors. Accordingly,
the values of α and ε are initially 1.0. After 25 mil-
lion episodes the learning rate α is reduced to a value
of 0.1. In this way, a potential over-fitting is com-
pensated. After 45 million episodes ε is also reduced
Table 4: Distribution of terminal states after the last episode
with ’sum of positive results’ summarizing the percentages
for the states ’exact match’, ’no actions/match’, and ’time-
out/match’ and thus representing the final 3D object classi-
fication rate of our approach.
percentage percentage
51 classes 10 classes
terminal state
exact match 0.0% 16.0%
no actions/match 5.4% 0.4%
no actions/miss 11.0% 0.2%
timeout/match 16.1% 58.6%
timeout/miss 11.6% 8.5%
fail state 55.9% 16.3%
sum of positive results 21.5% 75.0%
to a value of 0.1. From this moment on the rein-
forcement learning agent is in an exploitation phase
where classification rates are reasonably high, even if
10% of the actions are performed as random descrip-
tor selections. Figure 7 illustrates the adaptiveness
of our approach for the case that the FPFH descrip-
tor (Rusu et al., 2009) is omitted at the beginning,
using the reduced set of 10 object classes. Without
FPFH the classification rate is ≈ 57% (episode 45-50
million). After 50 million episodes, FPFH is added
0 20 40 60 80 100
6
10×
% of terminal states
10
20
30
40
50
60
70
80
adaptiveness, descriptor FPFH
episodes
0 20 40 60 80 100
6
10×
alpha/epsilon
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
timeout/match
timeout/miss
exact match
no actions/match
no actions/miss
sum positive
Figure 7: This graph illustrates the adaptiveness of our ap-
proach adding FPFH to the set of descriptors (at 50 mil-
lion episodes). The curves represent the distribution of
the terminal states depending on the number of performed
episodes.
to the list of available descriptors. This is indicated
by the red dashed line in Figure 7. Immediately after-
wards the number of correct classifications increases
significantly within a few episodes and stabilizes to
the value of about ≈ 67%. The difference of ≈ 67%
to the result of 75% that was reported in Section 4.2 is
due to the increased portion of random descriptor se-
lections and the adapted learning rate. If both, α and
ε, were set to zero the results would be identical.
Self-Learning 3D Object Classification
517
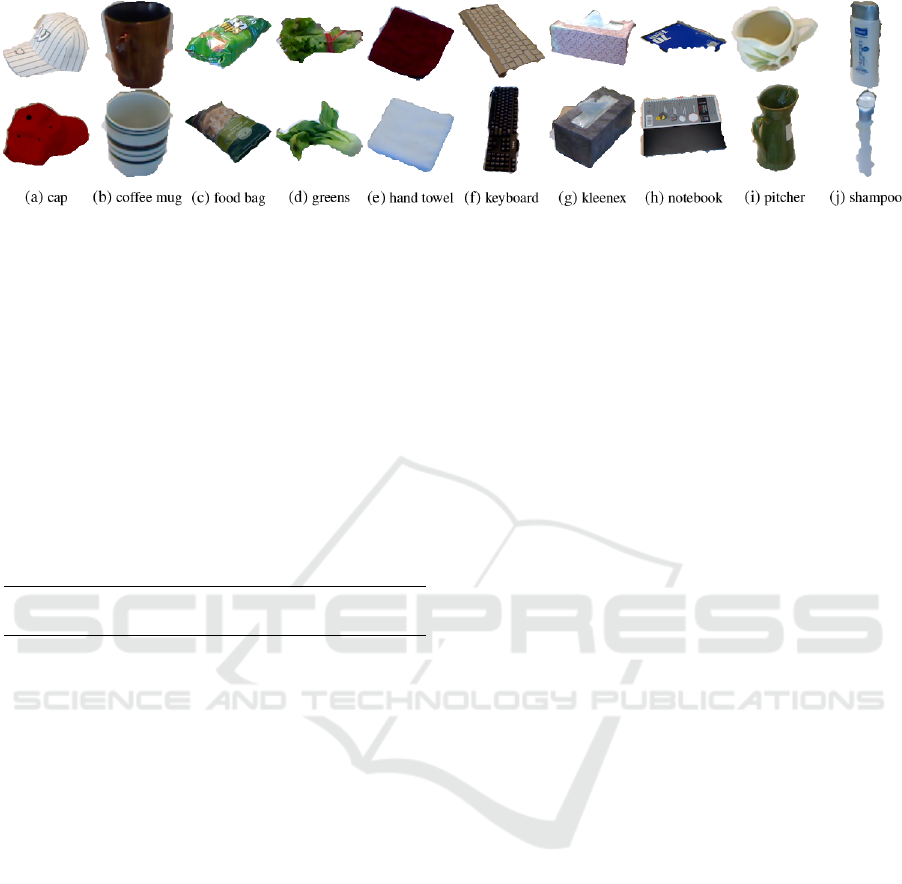
Figure 8: These images show examples from the reduced set of 10 object classes. The upper row shows images from an
object in a specific pose where classification yielded the best result, while the lower row shows an object from the same object
class where classification yielded the worst result. The overall geometry for most of the classes is similar for best and worst
matches with a few exceptions, the most obvious are the classes ’greens’ and ’pitcher’.
5 3D OBJECT CLASSIFICATION
RESULTS
The final 3D object classification rates that can be
achieved with our proposed approach of learning
strategies to select point cloud descriptors are sum-
marized concisely in Table 5. The classification rate
Table 5: Gain of the proposed approach in terms of classifi-
cation rates.
classification rates for: 51 classes 10 classes
proposed approach 21.5% 75.0%
single descriptor setting 9.4% 65.0%
of 21.5% that has been achieved with our approach
on the full set of 51 object classes, for example, is
the sum of the percentages for the terminal states ’ex-
act match’, ’no actions/match’, and ’timeout/match’
(see Table 4). This value has to be compared with the
highest classification rate that can be achieved in the
single descriptor setting. This classification rate has
been provided by the FPFH descriptor with 9.4% (see
Table 1). Thus, the classification rate could be more
than doubled with our approach in the case of 51 ob-
ject classes. In the case of the reduced set of 10 ob-
ject classes the classification rate of 75.0% achieved
with our approach (see Table 4) is an improvement
of 10 percentage points compared to the best classi-
fication rate of 65.0% which could be achieved with
FPFH (see Table 1). Furthermore, the classification
rate of 75.0% contains a share of 16.0% exact class
assignments (see Table 4, ’exact match’), whereas the
single descriptor setting across all descriptors did not
yield any exact assignment at all (see Subsection 3.2).
This means that the results obtained within the pro-
posed RL framework are partly also more reliable that
those obtained in the single descriptor setting. Fig-
ure 8 shows examples for success and failure cases.
The object instances and poses shown in the upper
row correspond to point clouds where the classifica-
tion yields the best results, while the point cloud of
the object instances and poses shown in the bottom
row lead to the worst classification results. With the
exception of the object classes ’greens’ and ’pitcher’
the proposed method seems to impose no bias in the
sense that point clouds with distinctly different geom-
etry (in comparison to other instances of their class)
are systematically classified worse. This argumenta-
tion can be verified by comparing the images of all ob-
ject instances from the reduced set of 10 object classes
given in the supplemental material.
6 CONCLUSION AND OUTLOOK
We presented a self-learning approach to object clas-
sification from 3D point clouds. We extended an ap-
proved 3D object classification pipeline based on lo-
cal 3D feature descriptors by a reinforcement learning
approach that learns strategies to select point cloud
descriptors depending on qualities of the point cloud
to be classified. The reinforcement learning frame-
work is provided with a number of 3D feature de-
scriptors and learns autonomously via trial and er-
ror a strategy to select and apply them successively
for an optimal classification result. Thus, the classi-
fication process does not follow a rigid scheme any-
more, but dynamically adapts its classification strat-
egy to a changing environment. Our experiments
demonstrated that this approach is able to provide
higher classification rates in comparison to results
obtained in rigid scheme classification settings. In
addition, some of the results turned out to be more
reliable. With few exception the proposed method
seems to impose no bias in the sense that point clouds
with distinctly different geometry (in comparison to
other instances of their class) are systematically clas-
sified worse. A special advantage of the reinforce-
ment learning framework consists in its flexibility and
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
518

adaptiveness. The latter allows for the subsequent in-
tegration of additional 3D feature descriptors while
the system is already running in an application sce-
nario. Our approach proved to be able to preserve
classification strategies that have been learned so far
and at the same time to smoothly integrate new de-
scriptors in already learned strategies. The adaptive-
ness of the proposed self-learning approach enhances
the flexibility of a 3D object classification system con-
siderably, as new feature descriptors will be devel-
oped in the future and the learning process for a spe-
cial application scenario does not have to be started
from scratch again.
REFERENCES
Andreopoulos, A. and Tsotsos, J. K. (2013). 50 years of ob-
ject recognition: Directions forward. Computer Vision
and Image Understanding, 117(8):827–891.
Arthur, D. and Vassilvitskii, S. (2007). k-means++: the ad-
vantages of careful seeding. In Proceedings of the
Eighteenth Annual ACM-SIAM Symposium on Dis-
crete Algorithms,, pages 1027–1035.
Ciresan, D. C., Meier, U., and Schmidhuber, J. (2012).
Multi-column deep neural networks for image classi-
fication. In 2012 IEEE Conference on Computer Vi-
sion and Pattern Recognition, Providence, USA, June
16-21, 2012, pages 3642–3649.
Csurka, G., Dance, C., Fan, L., Willamowski, J., and Bray,
C. (2004). Visual categorization with bags of key-
points. In Workshop on statistical learning in com-
puter vision, ECCV, volume 1, pages 1–2. Prague.
Filipe, S. and Alexandre, L. A. (2014). A comparative
evaluation of 3d keypoint detectors in a RGB-D ob-
ject dataset. In VISAPP 2014 - Proceedings of the 9th
International Conference on Computer Vision Theory
and Applications, Volume 1,, pages 476–483.
Garstka, J. (2016). Learning strategies to select point cloud
descriptors for large-scale 3-D object classification.
PhD thesis, FernUniversit
¨
at in Hagen.
Garstka, J. and Peters, G. (2016). Evaluation of local 3-d
point cloud descriptors in terms of suitability for ob-
ject classification. In ICINCO 2016 - 13th Int. Conf.
on Informatics in Control, Automation and Robotics,
Volume 2.
Guo, Y., Bennamoun, M., Sohel, F. A., Lu, M., and Wan, J.
(2014). 3d object recognition in cluttered scenes with
local surface features: A survey. IEEE Trans. Pattern
Anal. Mach. Intell., 36(11):2270–2287.
Joachims, T. (1998). Text categorization with suport vector
machines: Learning with many relevant features. In
Machine Learning: ECML-98, 10th European Con-
ference on Machine Learning,, pages 137–142.
Johnson, A. E. and Hebert, M. (1998). Surface matching
for object recognition in complex three-dimensional
scenes. Image Vision Comput., 16(9-10):635–651.
Lai, K., Bo, L., Ren, X., and Fox, D. (2011). A large-
scale hierarchical multi-view RGB-D object dataset.
In IEEE International Conference on Robotics and
Automation,, pages 1817–1824.
Li, J. and Allinson, N. M. (2008). A comprehensive review
of current local features for computer vision. Neuro-
computing, 71(10-12):1771–1787.
Loncomilla, P., Ruiz-del-Solar, J., and Mart
´
ınez, L. (2016).
Object recognition using local invariant features for
robotic applications. Pattern Recognition, 60:499–
514.
Madry, M., Ek, C. H., Detry, R., Hang, K., and Kragic,
D. (2012). Improving generalization for 3d object
categorization with global structure histograms. In
2012 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems,, pages 1379–1386.
Rusu, R. B., Blodow, N., and Beetz, M. (2009). Fast
point feature histograms for 3d registration. In 2009
IEEE International Conference on Robotics and Au-
tomation, ICRA 2009, Kobe, Japan, May 12-17, 2009,
pages 3212–3217.
Rusu, R. B., Blodow, N., Marton, Z. C., and Beetz, M.
(2008). Aligning point cloud views using persis-
tent feature histograms. In 2008 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems,
September 22-26, 2008, Acropolis Convention Center,
Nice, France, pages 3384–3391.
Salti, S., Tombari, F., and Stefano, L. D. (2011). A per-
formance evaluation of 3d keypoint detectors. In
3D Imaging, Modeling, Processing, Visualization
and Transmission, 2011 International Conference on,
pages 236–243. IEEE.
Sun, Z., Bebis, G., and Miller, R. (2006). On-road vehicle
detection: A review. IEEE Trans. Pattern Anal. Mach.
Intell., 28(5):694–711.
Sutton, R. S. and Barto, A. G. (1998). Reinforcement learn-
ing: An introduction. IEEE Trans. Neural Networks,
9(5):1054–1054.
Tombari, F., Salti, S., and Di Stefano, L. (2010a). Unique
shape context for 3d data description. In Proceedings
of the ACM workshop on 3D object retrieval, pages
57–62. ACM.
Tombari, F., Salti, S., and di Stefano, L. (2010b). Unique
signatures of histograms for local surface description.
In 11th European Conference on Computer Vision
(ECCV), 2010, Proceedings, Part III, pages 356–369.
Watkins, C. J. C. H. and Dayan, P. (1992). Technical note
q-learning. Machine Learning, 8:279–292.
Yang, Y., Yan, G., Zhu, H., Fu, M., and Wang, M. (2014).
Object segmentation and recognition in 3d point cloud
with language model. In Int. Conf. Multisensor Fu-
sion & Information Integration for Intelligent Sys-
tems,, pages 1–6.
Zhong, Y. (2009). Intrinsic shape signatures: A shape de-
scriptor for 3d object recognition. In 12th Interna-
tional Conference on Computer Vision (ICCV Work-
shops), pages 689–696. IEEE.
Self-Learning 3D Object Classification
519
