
AUTOGENIC: Automated Generation of Self-configuring Microservices
Stefan Kehrer and Wolfgang Blochinger
Department of Computer Science, Reutlingen University, Alteburgstr. 150, 72762 Reutlingen, Germany
Keywords:
Microservices, DevOps, Container Virtualization, Configuration, Service Registry, TOSCA, Docker, Consul.
Abstract:
The state of the art proposes the microservices architectural style to build applications. Additionally, container
virtualization and container management systems evolved into the perfect fit for developing, deploying, and
operating microservices in line with the DevOps paradigm. Container virtualization facilitates deployment
by ensuring independence from the runtime environment. However, microservices store their configuration in
the environment. Therefore, software developers have to wire their microservice implementation with techno-
logies provided by the target runtime environment such as configuration stores and service registries. These
technological dependencies counteract the portability benefit of using container virtualization. In this paper,
we present AUTOGENIC - a model-based approach to assist software developers in building microservices
as self-configuring containers without being bound to operational technologies. We provide developers with
a simple configuration model to specify configuration operations of containers and automatically generate a
self-configuring microservice tailored for the targeted runtime environment. Our approach is supported by a
method, which describes the steps to automate the generation of self-configuring microservices. Additionally,
we present and evaluate a prototype, which leverages the emerging TOSCA standard.
1 INTRODUCTION
Today’s business environment requires fast software
release cycles. To address this issue, continuous deli-
very and DevOps aim at bridging the gap between de-
velopment and operations by employing automation
and self-service tools. Microservices are an evolving
architectural style for building and releasing software
in line with the DevOps paradigm (Balalaie et al.,
2016; Pahl and Jamshidi, 2016). Microservices are
autonomous and independently deployable (Newman,
2015).
Unfortunately, the autonomous nature of micro-
services challenges their development: More and
more operational aspects are transferred into the re-
sponsibility of software developers - or how Amazon
calls it: “you build it, you run it” (O’Hanlon, 2006).
This is also enabled by technological advances such
as container virtualization (Kratzke and Quint, 2017;
Pahl and Jamshidi, 2016): Microservices are com-
monly built as a set of containers, which provide a
portable means to deploy microservices on state of the
art container management systems such as Marathon
1
1
https://mesosphere.github.io/marathon.
on Apache Mesos
2
, Kubernetes
3
, or Docker Swarm
4
.
In line with this trend, software developers have
to implement their microservices including operatio-
nal behavior. Every container that is part of the mi-
croservice has to be configured with specific runtime
parameters as well as endpoint information to inte-
ract with other containers. This configuration of con-
tainers might be applied during the deployment of a
microservice. However, in a dynamic environment
such as the cloud, dynamic updates of runtime pa-
rameters might be required. Furthermore, endpoint
information will likely change during runtime, e.g., if
a container has to be restarted. Thus, microservices
store their configuration in the environment
5
. This
means that configuration stores are used to store re-
quired runtime parameters and service registries are
used to find other containers. Following this appro-
ach, software developers have to wire their microser-
vice implementation with technologies provided by
the runtime environment. Besides adding more com-
plexity, this leads to heterogeneous implementations
of configuration management. Moreover, technologi-
2
https://mesos.apache.org.
3
https://kubernetes.io.
4
https://github.com/docker/swarm.
5
https://12factor.net/config.
Kehrer, S. and Blochinger, W.
AUTOGENIC: Automated Generation of Self-configuring Microservices.
DOI: 10.5220/0006659800350046
In Proceedings of the 8th International Conference on Cloud Computing and Services Science (CLOSER 2018), pages 35-46
ISBN: 978-989-758-295-0
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
35

cal dependencies on configuration stores and service
registries provided by the runtime environment decre-
ase the portability benefit inherent to containers.
To address the aforementioned challenges, we
present a novel approach called AUTOmated GENe-
ration of self-configuring mICroservices (AUTOGE-
NIC). Our model-based approach enables software
developers to specify the configuration operations of
containers with a configuration model. Based on this
model, we transform a supplied microservice into
a self-configuring microservice by automatically ad-
ding runtime behavior to its containers on a techni-
cal level. As a result, configuration is managed by
each container and thus accomplished in a decentrali-
zed manner. This transformation is provided as a ser-
vice to developers and thus decouples environment-
specific technologies from application development.
Our approach streamlines the cooperation of deve-
lopers and operations personnel by providing an ab-
straction layer between both groups, which basically
implements the separation of concerns principle in the
DevOps context. In particular, we present the follo-
wing contributions:
• We introduce the AUTOGENIC approach to assist
software developers in creating self-configuring
microservices.
• We provide the AUTOGENIC method, which des-
cribes the steps of generating self-configuring mi-
croservices on a conceptual level.
• We present an implemented prototype, which au-
tomates the AUTOGENIC method based on the
TOSCA standard and state of the art technologies.
The paper is structured as follows. In Section 2,
we describe microservices in general and motivate our
work. Section 3 gives an overview of the general con-
cepts of the AUTOGENIC approach. In Section 4,
we discuss the AUTOGENIC method, which descri-
bes the required steps to automate the generation of
self-configuring microservices. Further, we present
an implemented prototype in Section 5 and evaluate
this prototype in Section 6. In Section 7, we review
related work. Finally, Section 8 concludes this paper
and describes future work.
2 STATE OF THE ART AND
MOTIVATION
In this section, we describe the state of the art and pre-
sent an exemplary microservice to motivate our work.
2.1 Microservices
A microservice is built around a business capabi-
lity and implements the user interface, storage, and
any external collaborations required (Lewis and Fow-
ler, 2014). Thus, each microservice is a broad-stack
implementation of software for a specific business
capability (Lewis and Fowler, 2014). Microservi-
ces combine concepts from distributed systems and
service-oriented architecture leading to several bene-
fits (Newman, 2015). For instance, microservices can
be implemented with different technologies enabling
a best-of-breed approach. Thus, new technologies
can be adopted and old technologies can be replaced
much faster. Composing a system out of many small
services also provides benefits for deployment and
management: It allows to deploy and scale every mi-
croservice independently (Leymann et al., 2017). Ty-
pically, software containers are used to package and
deploy microservice components (Pahl et al., 2017).
A topology model or template, which describes the
containers a microservice is composed of and their
relationships, enables automated deployment (Kehrer
and Blochinger, 2017).
However, the benefits of microservices come with
the cost of operational complexity (Fowler, 2017).
The autonomous nature inherent to microservices re-
quires application developers to take responsibility
for operational aspects such as dynamic configuration
(Kookarinrat and Temtanapat, 2016). To this end, the
Twelve-Factor App
6
principles propose to store these
information in the runtime environment. Technolo-
gies such as configuration stores and service regis-
tries are used to store configuration values and ena-
ble dynamic bindings among containers. Employing
technologies like Consul
7
, Etcd
8
, or Zookeeper
9
is a
common practice for developing microservices (Tof-
fetti et al., 2017). They provide a scalable medium to
store configuration information.
2.2 Motivation
In this section, we introduce a microservice, which is
used as motivating example for our work. The topo-
logy of this microservice is composed of four contai-
ners interacting with each other (cf. Figure 1): The
wordpress container provides an Apache HTTP server
running a WordPress installation. The mysql contai-
ner runs a MySQL database. To answer user requests,
6
https://12factor.net.
7
https://www.consul.io.
8
https://github.com/coreos/etcd.
9
https://zookeeper.apache.org.
CLOSER 2018 - 8th International Conference on Cloud Computing and Services Science
36

Configuration
Store
A PI
Service
Registry
A PI
ConnectsTo
wordpress mysql
memcached
backup
ConnectsTo
ConnectsTo
Figure 1: Exemplary microservice storing its configuration
in the runtime environment.
the wordpress container connects to the mysql contai-
ner and retrieves data stored in the relational database.
Frequently requested results are cached in the mem-
cached container, which runs a Memcached
10
instal-
lation. Memcached is an in-memory object caching
system. The memcached container is queried by the
wordpress container before sending a read request to
the mysql container. Additionally, a separate backup
container periodically stores backups of the MySQL
database by connecting to the corresponding contai-
ner.
For configuration purposes, every container of the
formerly described microservice requires its runtime
parameters and endpoint information to interact with
other containers in the topology. To access their run-
time parameters, the containers connect to a configu-
ration store provided by the runtime environment. Si-
milarly, every container connects to a service registry
to access endpoint information of other containers (cf.
Figure 1). Whenever a runtime parameter or endpoint
information changes in the environment, a container
itself is responsible for reacting to this change. This
results in software developers having to wire their im-
plementations with operational technologies provided
by the runtime environment.
We identified several problems with this appro-
ach: (1) APIs of the configuration store and the ser-
vice registry have to be used by software developers.
Every time the operations personnel decides to choose
another technology, software developers have to be
instructed and existing microservice implementations
have to be modified. (2) Storing endpoint information
of containers belonging to a microservice in a cen-
10
https://memcached.org.
tral service registry may lead to conflicts with other
deployments and breaks the microservice paradigm,
e.g., if another service requester receives the endpoint
information of our MySQL database. This informa-
tion should be kept private and not exposed to other
microservices (O’Hanlon, 2006; Lewis and Fowler,
2014). (3) Moreover, portability is limited, i.e., mi-
croservices cannot be deployed on a runtime environ-
ment that does not provide the required technologies.
In general, software developers are confronted
with a lot of often changing technologies to enable
dynamic configuration. Technological dependencies
on specific configuration stores or service registries
counteract the portability benefit of using container
virtualization. New solutions are required, which
assist software developers in implementing dynamic
configuration for their microservices.
3 AUTOMATED GENERATION
OF SELF-CONFIGURING
MICROSERVICES
We propose AUTOmated GENeration of self-
configuring mICroservices (AUTOGENIC) to assist
software developers in building dynamically configu-
ring microservices. We aim at providing a simple me-
ans for software developers to take responsibility for
operational aspects of their microservice in line with
the “you build it, you run it” principle. We identi-
fied two fundamental design guidelines for such an
approach: (1) Software developers have to be able to
control the configuration of containers belonging to
a microservice. (2) Technological details should be
hidden from software developers to enable portability
and operational flexibility with respect to the runtime
environment and tool support.
Basically, AUTOGENIC is a model-based appro-
ach to decouple the development of microservices
from environment-specific technologies provided by
operations personnel. Software developers simply
specify configuration operations of their microservice
in a configuration model, i.e., without considering
the specific technologies present in the runtime en-
vironment. Based on this model, the required run-
time behavior can be automatically derived and map-
ped to operational technologies. This enables the de-
sign of a self-service tool for software developers to
automatically transform their microservice into a self-
configuring microservice tailored for the targeted run-
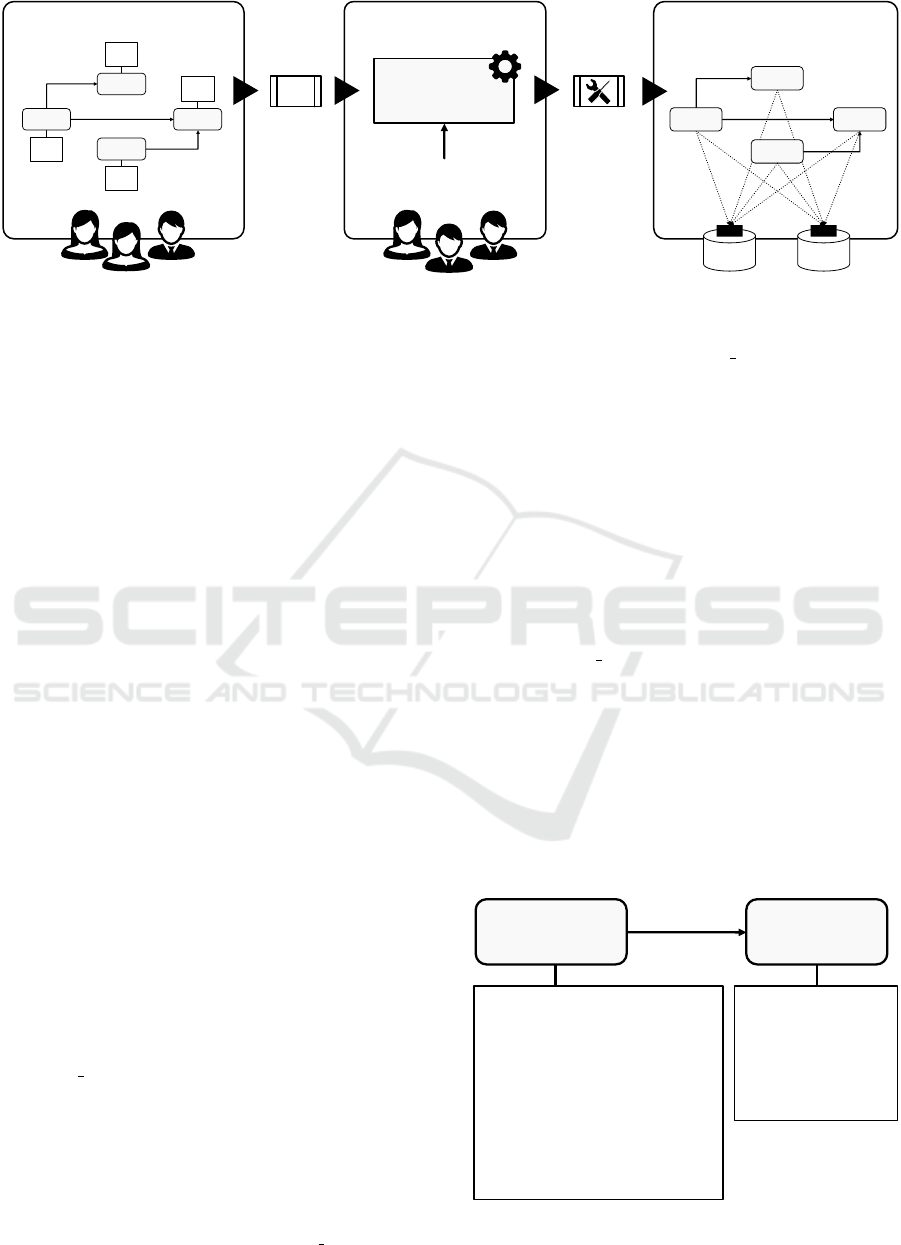
time environment (cf. Figure 2).
Microservices are constructed as independently
deployable units. Thus, we assume some kind of ser-
AUTOGENIC: Automated Generation of Self-configuring Microservices
37
Transformation
Modeling Deployment
AUTOGENIC
Nexus
Service Bundle
Self-configuring
Service Bundle
Software Developers
Operations Personnel
Runtime Environment
Specification
Runtime Environment
Config.
Store
A P I
Service
Registry
A P I
Figure 2: Overview of the AUTOGENIC approach.
vice bundle, which contains all the required artifacts
to deploy a microservice. An important part of the
service bundle is the topology model describing the
topology of containers and related artifacts (e.g., con-
tainer images) (Kehrer and Blochinger, 2017). The
topology model contains all information required to
automatically deploy a corresponding microservice to
a runtime environment. However, besides specifying
the containers and their relationships for deployment
purposes, developers also have to consider the dyna-
mic configuration of these containers during runtime
(cf. Section 2.1).
To specify the configuration requirements, we uti-
lize the existing topology model, which is part of
every service bundle. Following a model-based ap-
proach, we enable developers to annotate each contai-
ner specified in the topology model with a configura-
tion model. Figure 3 shows two containers, which are
part of a topology model, each annotated with a con-
figuration model. The configuration model contains
one or more configuration operations. These configu-
ration operations are defined by a name and specify
an implementation artifact as well as inputs. The im-
plementation artifact refers to an executable artifact in
the container (e.g., a shell script) that must be invoked
to execute the configuration operation on a technical
level. The inputs can be defined as key-value pairs,
which are passed to the implementation artifact upon
execution. In case of our exemplary microservice, a
shell script for connecting to the MySQL database
might be specified as implementation artifact of the
configure db operation attached to the wordpress con-
tainer (cf. Figure 3).
Additionally, we enable the use of functions to
specify input values for configuration operations.
Functions can be used to reference dynamic attri-
bute values of entities in the topology model, e.g.,
IP addresses of modeled containers. Referring to our
exemplary microservice, the configure db operation
specifies an input named mysql ip with the function
getIPAddress() that retrieves the IP address of the
mysql container (cf. Figure 3).
A core idea of the AUTOGENIC approach is to
automatically execute configuration operations whe-
never their input values change. Since these input
values are stored in the runtime environment, a cor-
responding event-trigger has to be registered to this
change event in the environment. The callback of this
event-trigger is given by the implementation artifact
specified for the corresponding configuration opera-
tion. This enables reactive configuration and dyna-
mic bindings among containers. A typical example
is the configure db operation of the wordpress contai-
ner. Reconfiguration and thus execution of the /confi-
gure.sh script is required whenever the IP address of
the mysql container changes in the environment.
The topology model enhanced with the proposed
configuration model (cf. Figure 3) is packaged into a
service bundle and then passed as input to a service
that we call AUTOGENIC Nexus (cf. Figure 2). The
AUTOGENIC Nexus takes a developer-supplied ser-
vice bundle as input and generates a self-configuring
ConnectsTo
wordpress
mysql
Configuration Model
Configuration Model
configure_db:
implementation: /configure.sh
inputs:
mysql_ip: mysql.getIPAddress()
update_cache:
implementation: …
inputs:
key: value
…
…
upd at e_settings:
implementation: …
inputs:
key: value
…
…
Figure 3: Containers annotated with configuration models.
CLOSER 2018 - 8th International Conference on Cloud Computing and Services Science
38

service bundle as output. The transformation applied
adds self-configuration mechanisms to each container
on a technical level based on the configuration opera-
tions specified. The AUTOGENIC Nexus is maintai-
ned by operations personnel and provided as a self-
service tool to software developers. It encapsulates
the specifics of the target runtime environment. This
might be the access mechanisms of the configuration
store and the service registry used in the runtime envi-
ronment (e.g., APIs) as well as event-dispatching me-
chanisms to trigger developer-supplied implementa-
tion artifacts. The selection of these technologies is an
operational decision and thus should be handled trans-
parently to application development. The runtime en-
vironment specification has to be considered during
the implementation of the AUTOGENIC Nexus.
Implemented once, the AUTOGENIC Nexus pro-
vides a self-service tool for developers, which ge-
nerates self-configuring service bundles targeted to
a specific runtime environment without any know-
ledge on operational technologies employed. The
self-configuring service bundle contains all required
information to deploy a microservice in an automated
manner (cf. Figure 2). This approach ensures the se-
paration of concerns principle in the DevOps context
in line with our design guidelines defined above.
Following our model-based approach, service
bundles can be developed independently of the run-
time environment. This leads to several benefits com-
pared to microservice configuration on programming
level, i.e., directly implementing the API of a configu-
ration store or service registry: (1) Different techno-
logies can be used to implement the required configu-
ration behavior depending on the target runtime envi-
ronment; (2) Developers do not have to build triggers
for configuration operations by wiring APIs. Configu-
ration operations are executed automatically whene-
ver their input values change; (3) Logical identifiers
of containers are only used in the model and not in
the containers themselves leading to higher reusabi-
lity. Further, these identifiers are private to the topo-
logy model of a single microservice and thus cannot
be used by other microservices. Note that this is an
important requirement, e.g., to prevent direct database
access from outside the service (O’Hanlon, 2006).
4 AUTOGENIC METHOD
The AUTOGENIC method specifies the steps to trans-
form an existing service bundle including its configu-
ration models into a self-configuring service bundle.
This method describes the transformation performed
by the AUTOGENIC Nexus on a conceptual level to
guide the runtime-specific implementation by opera-
tions personnel. Accordingly, our method describes
the transformation independently of (1) the modeling
language used for the topology and configuration mo-
dels, (2) the container format employed for virtuali-
zation, (3) operational technologies in the target run-
time environment, and (4) event-dispatching mecha-
nisms used to build event-triggers. As a result, our
method supports various combinations, which can be
found in practice (cf. Section 5). Figure 4 depicts the
AUTOGENIC method. We describe its steps in the
following.
4.1 Assumptions
This method requires a service bundle that contains a
topology model enhanced with configuration models.
Moreover, build specifications for each container are
assumed to be part of the service bundle.
4.2 Step 1: Scan Topology Model &
Build Specifications
We assume that each container specified in the topo-
logy model links its configuration model and a build
specification. Whereas the configuration model des-
cribes the desired configuration behavior, the build
specification can be used to derive the current runtime
behavior of the container. In this step, configuration
models and container build specifications are scanned
to derive a set of Transformation Requirements (TR).
TRs describe the requirements that have to be addres-
sed during the transformation and are provided as in-
put to the next steps. Scanning the configuration mo-
dels leads to the following TRs:
• A StoreKeyValueRequirement describes a key-
value pair, which is used as input for a specific
configuration operation. This key-value pair has
to be stored in the runtime environment during de-
ployment (e.g., by using a configuration store).
• A KeyWatchRequirement describes the require-
ment to watch the value of a specific input key
stored in the environment. Whenever the value re-
lated to this key changes, the corresponding con-
figuration operation should be executed.
• An AttributeWatchRequirement describes the re-
quirement to watch the value of a defined attri-
bute such as the IP address of a specific contai-
ner. Whenever this value changes the correspon-
ding configuration operation should be executed.
Additionally, the build specifications have to be scan-
ned. On a technical level this is performed by sim-
ply recognizing keywords (descriptors) that are defi-
AUTOGENIC: Automated Generation of Self-configuring Microservices
39
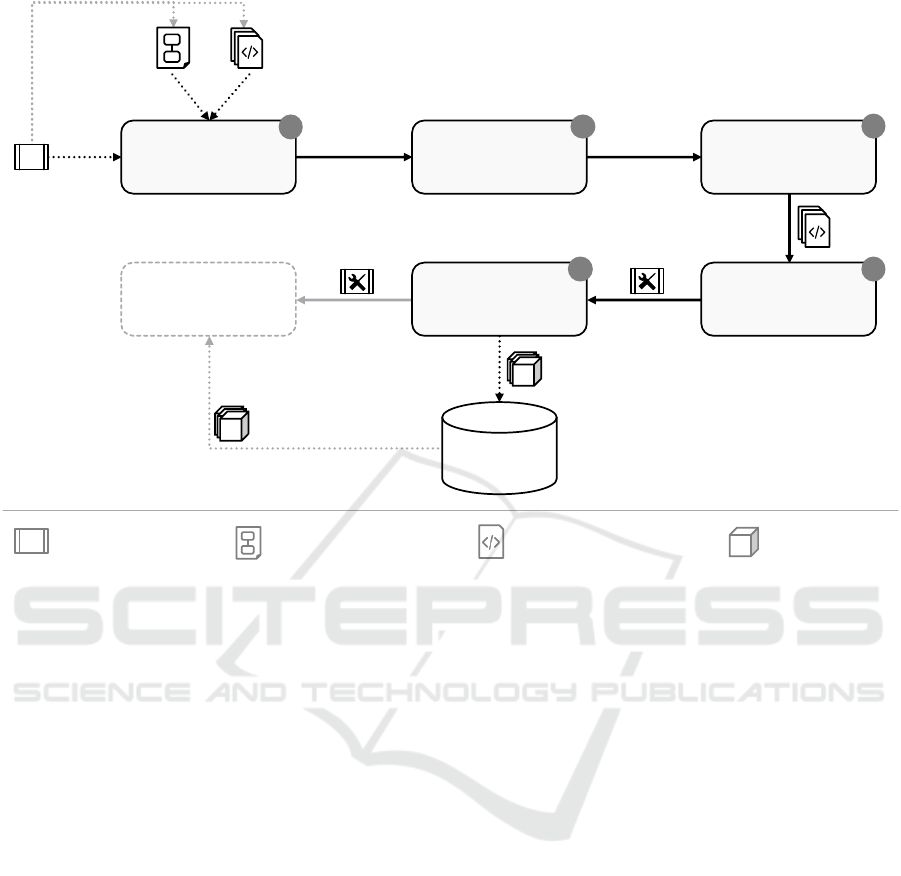
Service Bundle
Container Image
Build Specification
Topology Model
Scan Topology Model
& Build Specifications
Create Build
Specifications
Create Event-Triggers
& Callback-Operations
Create Self-Configuring
Service Bundle
Build Container ImagesAutomated Deployment
Artifact
Repository
1
2
3
45
Figure 4: Steps of the AUTOGENIC method.
ned by the container format employed. Scanning the
build specifications leads to the following TR:
• An EntryPointRequirement describes the en-
trypoint of a container. This is an executable run
at container startup (Turnbull, 2014).
TRs allow the automated construction of a new
container image (cf. Section 4.4), which fulfills
the same functional requirements as the developer-
supplied container image, but additionally contains
self-configuration mechanisms.
4.3 Step 2: Create Event-Triggers &
Callback-Operations
In this step, the TRs derived have to be addressed.
Therefore, implementation artifacts provided by de-
velopers have to be bound as callbacks to change
events in the environment. Environment-specific
event-dispatching mechanisms are employed for this
purpose. At the same time, functional aspects of a
developer-supplied container should be retained.
StoreKeyValueRequirements are addressed by an
initial setup process executed at each container’s star-
tup. This setup process stores the required inputs
in the environment. After the initial setup process,
each container runs the executable captured in its En-
tryPointRequirement.
KeyWatchRequirements as well as AttributeWat-
chRequirements have to be met by installing an event-
trigger for the corresponding configuration operation,
which executes the implementation artifact specified
whenever input values change. The implementation
of event-triggers depends on the technologies em-
ployed in the target runtime environment. This inclu-
des mapping the schema of operational data structures
as well as defining access methods and protocols for
the configuration store and service registry.
This step results in a set of technological artifacts,
which ensure dynamic configuration of each contai-
ner with respect to the target runtime environment.
The generated technological artifacts automatically
trigger the implementation artifacts supplied by the
developer every time a configuration value changes in
the environment.
4.4 Step 3: Create Build Specifications
To combine the developer-supplied container image
with the technological artifacts generated in Step 2,
a new build specification is created for each contai-
ner specified in the topology model. This build spe-
cification is built on top of the existing build speci-
fication that defines the developer-supplied microser-
vice. It basically adds the generated technological ar-
tifacts (cf. Section 4.3) and installs required software
CLOSER 2018 - 8th International Conference on Cloud Computing and Services Science
40

packages. In this context, a build specification tem-
plate may be used, which contains the settings deri-
ved from the runtime environment specification, e.g.,
commands to install required software.
4.5 Step 4: Create Self-Configuring
Service Bundle
Since configuration operations are now managed by
the corresponding container itself, the configuration
models are not required for deployment purposes. In
this step, a new service bundle is generated, which
provides a portable means to deploy the generated
self-configuring microservice to the target runtime en-
vironment.
4.6 Step 5: Build Container Images
Finally, the container images of the newly generated
build specifications captured in the self-configuring
service bundle have to be built. Besides creating con-
tainer images, they have to be pushed to an artifact
repository, which can be accessed during deployment.
4.7 Automated Deployment
The generated service bundle provides a means to au-
tomatically deploy the generated self-configuring mi-
croservice to the target runtime environment. There-
fore, container images can be retrieved from the arti-
fact repository specified in the service bundle.
5 AUTOGENIC PROTOTYPE
In this section, we present an AUTOGENIC Nexus
prototype. The AUTOGENIC method describes how
to transform a service bundle including the configura-
tion models to low-level technical aspects of the target
runtime environment. Hence, we have to make four
decisions with respect to an implementation: First,
we have to specify the modeling language used for
topology and configuration models. Possible opti-
ons are any custom modeling language supporting
our assumptions, domain-specific languages of con-
tainer management systems such as Kubernetes, Ma-
rathon, and Docker Swarm as well as the TOSCA
standard (OASIS, 2013). Secondly, we have to choose
a container format such as Docker, Application Con-
tainer (appc) Specification
11
, or the specification of
the Open Container Initiative (OCI)
12
. Thirdly, we
11
https://github.com/appc/spec.
12
https://www.opencontainers.org.
have to define the operational technologies of the
target runtime environment. Typical examples are
Consul, Etcd, ZooKeeper, SkyDNS
13
, Eureka
14
, and
Doozer
15
. Finally, event-dispatching mechanisms are
required. Options include specific tooling to access
operational technologies as well as ContainerPilot
16
.
In this section, we describe a prototype employing
the emerging TOSCA standard as modeling language,
which also contains a format for service bundles. We
rely on the TOSCA standard because it provides a
language to specify topology models of microservi-
ces in a portable manner and concepts to specify de-
pendencies in the model. The TOSCA concept of
Lifecycle Operations already provides us with com-
patible modeling constructs to specify configuration
operations. Further, we employ Docker
17
as contai-
ner virtualization technology, Consul as configuration
store and service registry, and ContainerPilot to build
event-triggers. We describe TOSCA and a TOSCA-
based service bundle of an exemplary microservice in
the following. Moreover, we present an exemplary
runtime environment specification. On this basis, we
present the implementation of our prototype.
5.1 Topology and Orchestration
Specification for Cloud Applications
(TOSCA)
The Topology and Orchestration Specification for
Cloud Applications (TOSCA) aims at standardizing
a modeling language for portable cloud services (OA-
SIS, 2013). Therefore, cloud services are captured as
topology graphs modeled in form of a Topology Tem-
plate. The nodes in the topology are modeled as Node
Templates.
Since a Topology Template is an abstract descrip-
tion of a service topology, Deployment Artifacts such
as container images (e.g., Docker Images) are linked
to Node Templates as depicted in Figure 5. Node
Templates also define Lifecycle Operations. These
Lifecycle Operations are implemented by Implemen-
tation Artifacts such as shell scripts (cf. Figure 5).
Additionally, TOSCA provides a type system that
allows the definition of custom types such as Node
Types or Artifact types. These type definitions and the
Topology Template are captured in a so-called Service
Template. A TOSCA orchestrator processes a Service
Template to instantiate nodes. Modeling a TOSCA-
13
https://github.com/skynetservices/skydns.
14
https://github.com/Netflix/eureka.
15
https://github.com/ha/doozerd.
16
https://github.com/joyent/containerpilot.
17
https://docker.com.
AUTOGENIC: Automated Generation of Self-configuring Microservices
41

create
start
Lifecycle
Operations
Shell
ScriptShell
ScriptShell
Script
Implementation Artifacts
Deployment Artifact
implements
implements
…
Node Template
Docker
Image
Figure 5: TOSCA Artifacts and Lifecycle Operations.
based cloud service results in a self-contained, por-
table service model called Cloud Service ARchive
(CSAR) that can be used to deploy service instances
in all TOSCA-compliant environments. The CSAR
contains the Service Template and related Deploy-
ment Artifacts as well as Implementation Artifacts.
In the Simple Profile in YAML V1.0 (OASIS, 2016),
TOSCA provides modeling constructs for containers
as well as TOSCA Functions. TOSCA Functions
allow referencing values of entities in the Topology
Template, which have to be resolved during runtime.
5.2 TOSCA-based Service Bundle
In this section, we describe a TOSCA-based service
bundle of our exemplary microservice described in
Section 2.2. This service bundle will be used as exem-
plary input for our prototypical implementation. Due
to space limitations, we only present representative
parts of the service bundle.
We use a CSAR as service bundle, which contains
a description of the microservice topology by me-
ans of a Topology Template. The Topology Template
specifies Node Templates for the containers, namely
wordpress, memcached, mysql, and backup. Listing 1
shows the Node Template of wordpress. It specifies
its Deployment Artifact, which is a Docker Image (cf.
Listing 1, line 6–9). This Docker Image is provided to
the Create Operation to instantiate the node (cf. Lis-
ting 1, line 12–13). To specify our configuration mo-
dels, we append an additional Lifecycle Interface na-
med Configure for configuration operations (cf. Lis-
ting 1, line 14–22). This Lifecycle Interface provides
the information required by the AUTOGENIC Nexus.
The configure db Operation specifies an Imple-
mentation Artifact /configure.sh, which requires four
input values. The host of the database is speci-
fied with a TOSCA Function (cf. Listing 1, line 18).
A TOSCA Function specifies an input value that
depends on runtime information. In this case, the IP
1 wordpress:
2 ...
3 contains: [wordpress_build]
4 ...
5 artifacts:
6 wp_image:
7 file: wordpress-custom
8 type: tosca.artifacts.Deployment.Image.Container.Docker
9 repository: custom_repository
10 interfaces:
11 Standard:
12 create:
13 implementation: wp_image
14 Configure:
15 configure_db:
16 implementation: /configure.sh
17 inputs:
18 DB_HOST: { get_attribute: [mysql, ip_address] }
19 DB_USER: myuser
20 DB_PASSWORD: pw
21 DB_NAME: mydb
22 ...
Listing 1: wordpress Node Template in YAML.
1 wordpress_build:
2 ...
3 artifacts:
4 build_spec:
5 file: artifacts/wordpress/Dockerfile
6 type: cst.artifacts.Deployment.BuildSpec.Docker
7 properties:
8 image_name: wordpress-custom
9 repository: custom_repository
10 interfaces:
11 Standard:
12 create:
13 implementation: build_spec
Listing 2: wordpress build Node Template in YAML.
address of mysql is required to connect to the data-
base.
Container images only capture file system changes
and thus do not provide information on how they have
been created. They are constructed of a set of layers
each described by a corresponding build specification
such as a Dockerfile. However, the TOSCA standard
does not allow the definition of build specifications
describing the construction of container images. To
resolve this issue, we introduced the concept of Con-
tained Nodes (Kehrer and Blochinger, 2017) to model
build specifications for each Node Template. There-
fore, a container Node Template such as wordpress
links a contained Node Template (cf. Listing 1, line
3). The wordpress build Node Template specifies the
build specification of the corresponding wordpress-
custom Docker Image (cf. Listing 2, line 4–9) requi-
red to deploy wordpress. In this case, the build speci-
fication is a Dockerfile.
The containers memcached, mysql, and backup are
modeled in an analogous manner and specify their
Deployment Artifacts as well as configuration opera-
tions as explained above.
5.3 Runtime Environment Specification
The target runtime environment addressed by our pro-
totype is a TOSCA-based container management sy-
CLOSER 2018 - 8th International Conference on Cloud Computing and Services Science
42

stem from previous work (Kehrer and Blochinger,
2017), which can be used to deploy a TOSCA-based
service bundle. We selected Consul to store con-
figuration and endpoint information in the environ-
ment, which provides both a key-value store to store
configuration data and service discovery mechanisms.
The Consul ecosystem provides a rich set of tools to
access stored data. To enable self-configuring micro-
services, we have to additionally select technologies
used to bind configuration operations to events. We
chose ContainerPilot, which is an open-source pro-
ject developed by Joyent. ContainerPilot resembles
the UNIX concept of process supervision by provi-
ding a supervisor middleware for processes running
inside a software container. Besides, it provides in-
tegration with service discovery tooling, which we
apply to bind event-triggers to configuration operati-
ons. ContainerPilot is configured by passing a confi-
guration file, which contains the processes to be run.
A Docker Registry
18
is employed as artifact reposi-
tory, i.e., to push and retrieve container images (cf.
Figure 4).
5.4 Implementation
In this section, we outline how we implemented our
prototype in Java. Therefore, we describe the imple-
mentation counterparts of step 1–5 as defined in the
AUTOGENIC method (cf. Section 4).
Step 1: A TOSCA Parser loads the TOSCA-based
service bundle and transforms the Service Tem-
plate into an internal object. Our RequirementScan-
ner derives TRs from the Topology Template, na-
mely StoreKeyValueRequirements, KeyWatchRequi-
rements, and AttributeWatchRequirements. Moreo-
ver, the RequirementScanner scans the Dockerfiles
linked in the Service Template to identify EntryPoin-
tRequirements.
Step 2: We employ ContainerPilot version 3.1.1 as
process supervisor for each container. A Container-
Pilot configuration file is used to create event-triggers
for configuration operations. The key-value pairs des-
cribed by StoreKeyValueRequirements are stored in
Consul with an initial setup process executed on con-
tainer startup. Moreover, the executable captured in
an EntryPointRequirement is executed after the initial
setup process.
KeyWatchRequirements and AttributeWatchRe-
quirements require the installation of event-triggers.
Technically, we register separate background proces-
ses in the ContainerPilot configuration file. These
background processes run Consul watches with the
18
https://hub.docker.com/ /registry.
Consul command line tool, which can be used to get
informed whenever a value changes. We use Con-
sul watches to trigger envconsul
19
whenever an input
value of a configuration operation changes in Con-
sul. Envconsul then executes the implementation arti-
fact of the corresponding configuration operation and
provides the inputs as environment variables. The
resulting technological artifacts are a ContainerPilot
configuration file and scripts for the initial setup pro-
cess.
Step 3: To create build specifications, we use a file
template for each Dockerfile, which installs a Consul
client, envconsul, and ContainerPilot. Additionally,
we add the artifacts generated in Step 2. The proces-
sing is implemented based on Apache FreeMarker
20
,
which is an open-source template engine.
Step 4: A new contained Node Template is added to
each container Node Template, which is built on top
of the developer-supplied contained Node Template
and links the generated build specification. Besides,
the Deployment Artifacts of the container Node Tem-
plates are updated with the name of the new container
images. The generated Service Template is added to
a newly generated service bundle, which contains all
build specifications and technological artifacts requi-
red to build the container images.
Step 5: To build container images, we assume a
Docker Engine running on the host. We connect to
the Docker Engine by using the Docker-Client
21
li-
brary developed by Spotify. Docker-Client connects
to the Docker Engine through the default UNIX dom-
ain socket provided to control Docker-specific functi-
onality. We build the required container images des-
cribed by the generated build specifications and push
them to the artifact repository specified in the Topo-
logy Template.
6 EVALUATION
To evaluate our prototype, we employ the formerly
described service bundle of our exemplary microser-
vice (cf. Section 5.2). The underlying runtime en-
vironment specification is given in Section 5.3. We
present two experiments to analyze the overhead re-
sulting from the transformation performed by the AU-
TOGENIC Nexus prototype.
In the baseline experiment, we build all developer-
supplied container images specified in the service
19
https://github.com/hashicorp/envconsul.
20
http://freemarker.org.
21
https://github.com/spotify/docker-client.
AUTOGENIC: Automated Generation of Self-configuring Microservices
43

bundle and measure the total generation time. We
define the total generation time as the accumulated
time, which is required to build these container ima-
ges and to push the generated container images to the
artifact repository. In the transformation experiment,
we run the prototype to generate a self-configuring
service bundle and measure the total transformation
time. We define the total transformation time as the
elapsed time from the start of the prototype to the
point, where all steps of the AUTOGENIC method are
successfully completed. This also includes pushing
the generated container images to the corresponding
artifact repository (cf. Figure 4).
We executed our experiments on a CentOS 7 vir-
tual machine with 2 vCPUs clocked at 2.6 GHz, 4
GB RAM, and 40 GB disk running in our OpenStack-
based cloud environment. The virtual machine pro-
vides an OpenJDK Runtime Environment 1.8.0 and
Docker Engine 1.12.6. For building container ima-
ges, we rely on the Docker Engine API v1.24. As
artifact repository, we run a private Docker Registry
v2.6 on localhost. We executed ten independent runs
for each experiment and measured the total generation
time and the total transformation time, respectively.
In the baseline experiment, we build a single con-
tainer image for each container. These container ima-
ges are built based on the build specification spe-
cified in the service bundle. However, all contai-
ner images require base images from the Docker-
Hub. The wordpress container requires downloa-
ding php:5.6-apache
22
with 377.7 MB, memcached
requires debian:stretch-slim
23
with 55.24 MB, mysql
requires oraclelinux:7-slim
24
with 117.6 MB, and
backup requires python:2.7.14-jessie
25
with 679.3
MB. To ensure that we measure the total generation
time without caching, we cleared the Docker cache
and the Docker Registry before every run. In this con-
text, caching of container images relates to the inter-
mediate layers stored by Docker to speed up future
build processes. Based on the measurements, we cal-
culated an average total generation time of (882 ±38)
seconds.
In the transformation experiment, we ran our pro-
totype to measure the total transformation time. The-
refore, all required container images are built and
pushed to the artifact repository. This includes the
developer-supplied container images as well as con-
tainer images generated by the AUTOGENIC Nexus
prototype. Again, we cleared the Docker cache and
the Docker Registry before every run. Based on the
22
https://hub.docker.com/ /php.
23
https://hub.docker.com/ /debian.
24
https://hub.docker.com/ /oraclelinux.
25
https://hub.docker.com/ /python.
measurements, we calculated an average total trans-
formation time of (1349 ± 16) seconds.
The transformation adds an average overhead in
size of 67.8 MB per container image. This is largely
related to ContainerPilot and Consul-specific tooling.
Note that the container images built in the baseline ex-
periment are not self-configuring. Additional manual
effort would be required to enable the same features,
thus also leading to larger image sizes.
In summary, the transformation applied by our
prototype results in an average overhead of 467 se-
conds to enable the AUTOGENIC approach. However,
we enable software developers to implement their mi-
croservices independent of operational technologies,
which saves time during development. Moreover, our
model-based approach leads to several benefits such
as portability of microservice implementations and
the separation of concerns for software developers
and operations personnel (cf. Section 3).
The overhead measured is basically related to
building additional container images, which include
the required self-configuration mechanisms. Note
that the measurements depend on the size of required
and generated container images, the network band-
width for downloading the required base images, and
the location of the artifact repository. Thus, the re-
ported values may be different in a real world sce-
nario. Furthermore, we identified several opportuni-
ties to speed up the transformation performance such
as building container images concurrently and storing
required software packages locally. Obviously, ca-
ching techniques offer another opportunity for perfor-
mance tuning.
7 RELATED WORK
Our approach aims at facilitating the development of
self-configuring microservices by introducing an ab-
straction layer between software developers and ope-
rations personnel. Implementing the AUTOGENIC
method leads to a self-service tool that enables de-
velopers to take responsibility for the dynamic con-
figuration of their microservices independently of the
runtime environment. Using self-service tools and au-
tomation is a commonly applied approach for suppor-
ting DevOps (H
¨
uttermann, 2012).
Microservices require decentralized management
and prefer choreography over orchestration (Fowler,
2017; Newman, 2015; Zimmermann, 2017). The aut-
hors of (Schermann et al., 2016) state that more re-
search on choreography rather than orchestration is
required. Self-configuring microservices are a solu-
tion to ensure dynamic configuration without relying
CLOSER 2018 - 8th International Conference on Cloud Computing and Services Science
44

on centralized orchestration. Following the AUTO-
GENIC approach, configuration is managed by each
container and thus executed in a decentralized, event-
based manner.
Several approaches exist to build microservices
with decentralized configuration capabilities. In (Tof-
fetti et al., 2015) and (Toffetti et al., 2017) distri-
buted in-memory key-value stores are employed to
communicate changes among components. Whereas
this results in a similar technical implementation, our
model-based approach contributes to the ease of deve-
lopment of self-configuring microservices. Thus, de-
velopers are relieved of the burden of wiring their mi-
croservice implementations with operational techno-
logies. In (Stubbs et al., 2015), the authors present
a solution to the service discovery problem based on
Serf
26
. Their approach proposes an additional Serf-
node container, which manages a required container
instance. In contrast, we add an environment-specific
supervisor (e.g., ContainerPilot) directly to an exis-
ting container image. Whereas Serfnodes do not re-
quire building new container images, they require ex-
tra configuration and only solve the service discovery
problem. Moreover, the presented solution does not
provide the same abstraction level compared to our
model-based approach, which uses configuration mo-
dels to define operational behavior on a higher level.
Microservice chassis
27
such as Spring Cloud
28
might be used to dynamically configure microservi-
ces. However, microservice chassis are bound to
a specific programming language and are limited to
supported operational tooling. Netflix Prana
29
provi-
des a side car for services based on the NetflixOSS
30
ecosystem. This enables the use of Java-based
NetflixOSS libraries for microservices written in ot-
her programming languages. Registrator
31
enables
service discovery features for Docker containers by
watching the runtime environment. In comparison,
we provide a simple means to software developers and
separate the logical definition of configuration opera-
tions from their technical implementation. Following
this model-based approach enables the use of diffe-
rent technological solutions depending on the target
runtime environment.
26
https://www.serf.io.
27
http://microservices.io/patterns/microservice-
chassis.html.
28
http://projects.spring.io/spring-cloud.
29
https://github.com/Netflix/Prana.
30
https://netflix.github.io.
31
https://github.com/gliderlabs/registrator.
8 CONCLUSION
In this paper, we presented the AUTOGENIC appro-
ach to automatically generate self-configuring micro-
services. We introduced a novel approach to decou-
ple software developers and operations personnel by
separating their concerns. This leads to microservice
development independent of the target runtime envi-
ronment and thus also enables flexibility for operati-
ons personnel with respect to technological decisions
and changes. Furthermore, we presented the AUTO-
GENIC method, which describes the steps to generate
self-configuring microservices. The method is des-
cribed on a conceptual level and thus applicable to
any modeling language and runtime environment ful-
filling the proposed assumptions. We validated our
approach by implementing a prototype based on the
TOSCA standard and state of the art technologies.
In the future, we plan to investigate use cases
beyond dynamic configuration. Our prototype pro-
vides evidence that also monitoring features might be
automatically enabled for developer-supplied micro-
services. Following the AUTOGENIC approach, re-
quired monitoring endpoints can be added in a trans-
parent manner thus hiding the monitoring solution
employed from software developers.
ACKNOWLEDGEMENTS
This research was partially funded by the Ministry
of Science of Baden-W
¨
urttemberg, Germany, for the
Doctoral Program ’Services Computing’.
REFERENCES
Balalaie, A., Heydarnoori, A., and Jamshidi, P. (2016). Mi-
croservices architecture enables devops: Migration to
a cloud-native architecture. IEEE Software, 33(3):42–
52.
Fowler, M. (2017). Microservices Resource Guide. URL:
https://martinfowler.com/microservices/.
H
¨
uttermann, M. (2012). DevOps for Developers. Apress.
Kehrer, S. and Blochinger, W. (2017). Tosca-based con-
tainer orchestration on mesos - two-phase deployment
of cloud applications using container-based artifacts.
Computer Science Research and Development.
Kookarinrat, P. and Temtanapat, Y. (2016). Design and im-
plementation of a decentralized message bus for mi-
croservices. In 2016 13th International Joint Confe-
rence on Computer Science and Software Engineering
(JCSSE), pages 1–6.
Kratzke, N. and Quint, P.-C. (2017). Understanding cloud-
native applications after 10 years of cloud computing
AUTOGENIC: Automated Generation of Self-configuring Microservices
45

- a systematic mapping study. Journal of Systems and
Software, 126:1 – 16.
Lewis, J. and Fowler, M. (2014). Microservices a
definition of this new architectural term. URL:
https://martinfowler.com/articles/microservices.html.
Leymann, F., Breitenb
¨
ucher, U., Wagner, S., and Wettinger,
J. (2017). Native Cloud Applications: Why Monolithic
Virtualization Is Not Their Foundation, pages 16–40.
Springer International Publishing, Cham.
Newman, S. (2015). Building Microservices. O’Reilly Me-
dia, Inc., 1st edition.
OASIS (2013). Topology and orchestration specifi-
cation for cloud applications (tosca) version 1.0,
committee specification 01. URL: http://docs.oasis-
open.org/tosca/TOSCA/v1.0/cs01/TOSCA-v1.0-
cs01.html.
OASIS (2016). Tosca simple profile in yaml ver-
sion 1.0, committee specification 01. URL:
http://docs.oasis-open.org/tosca/TOSCA-Simple-
Profile-YAML/v1.0/cs01/TOSCA-Simple-Profile-
YAML-v1.0-cs01.html.
O’Hanlon, C. (2006). A conversation with werner vogels.
Queue, 4(4):14:14–14:22.
Pahl, C., Brogi, A., Soldani, J., and Jamshidi, P. (2017).
Cloud container technologies: a state-of-the-art re-
view. IEEE Transactions on Cloud Computing,
PP(99):1–1.
Pahl, C. and Jamshidi, P. (2016). Microservices: A syste-
matic mapping study. In Proceedings of the 6th In-
ternational Conference on Cloud Computing and Ser-
vices Science - Volume 1 and 2, CLOSER 2016, pa-
ges 137–146, Portugal. SCITEPRESS - Science and
Technology Publications, Lda.
Schermann, G., Cito, J., and Leitner, P. (2016). All the Ser-
vices Large and Micro: Revisiting Industrial Practice
in Services Computing, pages 36–47. Springer, Berlin,
Heidelberg.
Stubbs, J., Moreira, W., and Dooley, R. (2015). Distributed
systems of microservices using docker and serfnode.
In 2015 7th International Workshop on Science Gate-
ways, pages 34–39.
Toffetti, G., Brunner, S., Bl
¨
ochlinger, M., Dudouet, F.,
and Edmonds, A. (2015). An architecture for self-
managing microservices. In Proceedings of the 1st
International Workshop on Automated Incident Mana-
gement in Cloud, AIMC ’15, pages 19–24, New York,
NY, USA. ACM.
Toffetti, G., Brunner, S., Bl
¨
ochlinger, M., Spillner, J.,
and Bohnert, T. M. (2017). Self-managing cloud-
native applications: Design, implementation, and
experience. Future Generation Computer Systems,
72(Supplement C):165 – 179.
Turnbull, J. (2014). The Docker Book: Containerization is
the new virtualization. James Turnbull.
Zimmermann, O. (2017). Microservices tenets. Computer
Science - Research and Development, 32(3-4):301–
310.
CLOSER 2018 - 8th International Conference on Cloud Computing and Services Science
46
