
Development of a Remote Laboratory for Control-engineering
Education based on an Industrial Fluid Transport Platform
Danilo Pequeno, José Sérgio da Rocha Neto, Jaidilson Jó da Silva and Angelo Perkusich
Department of Electrical Engineering, Federal University of Campina Grande,
Aprigio Veloso Street, Campina Grande, Paraíba, Brazil
Keywords: Control Systems, Remote Laboratory, Computer Supported Education.
Abstract: This paper presents the development of a remote laboratory based on an industrial fluid transport platform.
The goal is to improve the control-engineering education using new technologies, saving equipment and
personnel for the institution and time and money for the remote students. The pilot plant was initially
developed for the study of fouling detection and adapted in this work for the development of a laboratory, in
which students and researchers can, over the Internet, perform experiments without any limitation of time and
location. The LabVIEW software was used to implement the Human-Machine Interface (HMI) through a
didactic interaction and the developed remote laboratory has been tested to be used in different disciplines.
1 INTRODUCTION
A very common problem that occurs in industrial
fluidic transport systems is the gradual accumulation
of organic or inorganic substances along the inner
surface of the tube in a process called fouling. It
happens slowly and it is typical of the chemical,
petroleum, food and pharmaceutical industries. This
is a serious problem because the fouling reduces the
internal diameter of the tube, as shown in Figure 1,
increasing the internal pressure, even the rupture of
the pipe (Rose, 1995).
Figure 1: The comparison between tubes with (left) and
without (right) fouling.
According to Mansoori (2002), pressure and flow
variables are directly associated with this process.
Consequently, these are the variables of interest for
monitoring and control system, in order to avoid the
fouling formation.
To promote the study of control systems and
industrial automation, a remote laboratory was
developed for an industrial fluid transport platform
available at the Electronic Instrumentation and
Control Laboratory (LIEC) in the Federal University
of Campina Grande (UFCG), Brazil.
This paper is organized as follows. In section 2, a
quick bibliographic review is made on industrial
control systems. Section 3 presents the experimental
platform under study with its all sensors and
actuators. In section 4, the results obtained for an on-
line experiment to test the laboratory are discussed.
Finally, section 5 summarizes a conclusion about the
remote laboratory developed and its applications for
undergraduate students on Electrical Engineering and
researchers on control systems.
2 CONTROL SYSTEMS
Control systems aim at a set of variables of a given
process behaving in a specific way in the domain of
time or frequency (Skogestad and Postlehwaite,
2005). Thus, the control system acts on manipulated
variables with the interest of controlling the output
variables of the process.
In general, a closed control loop is shown in
Figure 2. The controller acts on the process to be
Pequeno, D., Rocha Neto, J., Silva, J. and Perkusich, A.
Development of a Remote Laboratory for Control-engineering Education based on an Industrial Fluid Transport Platform.
DOI: 10.5220/0006666604730480
In Proceedings of the 10th International Conference on Computer Supported Education (CSEDU 2018), pages 473-480
ISBN: 978-989-758-291-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
473
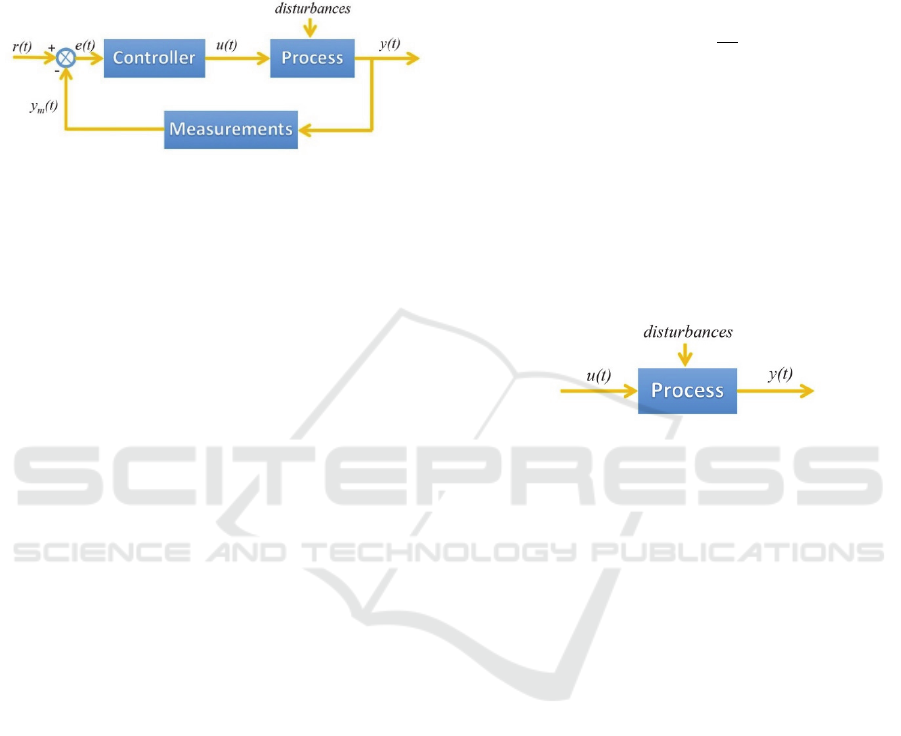
controlled by a manipulated variable u(t), calculated
form the error e(t) between the desired set point r(t)
and the measured value y
m
(t) of the output process
variable (Ogata, 2009). The process may be subject to
disturbances, which should be considered in the
design of the control system.
Figure 2: Control diagram in closed loop.
First of all, to design a control system, it is
necessary to identify the models of plant under study
through the modeling stage. Subsequently, the
controller is tuned according to the models and the
type of system.
2.1 Modeling
The identification of a mathematical model of the
system, which allows the design of controllers for the
plant, can usually be performed by two methods. In
the first, it is necessary to know the equations that
govern the physical phenomena associated to the
system. However, the theoretical method can result in
rather complex mathematical problems, so it is
common in industry to use the experimental method
(Ljung and Glad, 2016).
In the experimental method, the behavior of the
variables of interest is observed through the
application of known inputs that lead the outputs to
have a behavior already determined mathematically.
In practice, consecutive tests are performed on the
system and the input and output data are stored and
then processed in a specific software to adjust the
experimental curves obtained to the known
theoretical models.
2.2 PID Controller
The Proportional-Integral-Derivative (PID) action is
the most used in the industry and has been used
worldwide for industrial control systems. The
popularity of PID controllers can be attributed in part
to their robust performance over a wide range of
operating conditions and in part to their functional
simplicity, which allows engineers to operate them
directly (National Instruments, 2011).
As the name suggests, the PID controller is
composed of three parameters: Kp [dimensionless],
T
i
[seconds] is the integral time constant and T
d
[seconds] is the derivative time constant. Thus, the
PID controller can be represented according to the
Laplace Transform, as can be observed in the
Equation (1).
1
(1)
The parameters used to tune the PID controller
can be calculated by several techniques. The most
famous is the technique developed by Ziegler and
Nichols (1942).
2.3 SISO Systems
Systems that have a single input and a single output
variables are called SISO (Single Input Single
Output) systems, as can be seen in Figure 3.
Figure 3: SISO system diagram.
As can be observed, in these systems the output
variable y(t) can be directly controlled from the
manipulated variable u(t). Therefore, there will be
only one control loop. The mathematical model that
represents a process is called transfer function, and it
is a mathematical function that transforms the input
signal u(t) in the output y(t).
2.4 MIMO Systems
It is quite common to find, in real industrial processes,
control systems with more than one input and output.
These systems are called MIMO (Multiple Input
Multiple Output).
Figure 4 shows a MIMO system, in the frequency
domain, with two inputs and two outputs, also known
as the TITO (Two Inputs Two Outputs) system. It is
observed that both manipulated variables interact
directly with both outputs and therefore, there are
now four control loops, defined by four transfer
functions Hij(s), each one representing the influence
of input j on output i.
CSEDU 2018 - 10th International Conference on Computer Supported Education
474

Figure 4: 2x2 MIMO system diagram.
MIMO control problems tend to be more complex
than SISO, as there are interactions in the process
between the output and manipulated variables.
Generally, a change in a manipulated variable (U
1
or
U
2
) will affect all the others output variables (Y
1
and
Y
2
). Due to process interactions, the selection of the
best loop parity can be difficult.
In order to identify the best parity of the loops for
control (Y
1
/U
1
and Y
2
/U
2
or Y
1
/U
2
and Y
2
/U
1
),
several criteria were proposed like the Relative Gain
Array (RGA), proposed by Bristol (1966), and the
Relative Normalized Gain Array (RNGA) proposed
by He et al. (2009). These methods propose an
analysis of the force of interaction between the loops.
Once the control loops have been identified, it is
possible to proceed with the design of the PID
controllers, using a decentralized control structure.
Thus, each controller is designed as if the MIMO
system were a set of SISO systems.
2.4.1 Decoupling
When the interaction between the loops is not
significant, a decentralized controller, as presented
earlier, may be sufficient to ensure control of the
system. However, if the interactions are more
significant, a centralized controller using decoupling
is more appropriate, as suggested by Garrido et al.
(2011).
The decoupling is a matrix D of transfer functions,
inserted between the control matrix and the processes
matrix, as it can be observed in Figure 5. Its objective
is to compensate the interaction between the process
loops, so that the controller sees the Decoupling-
Process set as independent SISO systems.
Figure 5: TITO system with decoupling diagram.
3 EXPERIMENTAL PLATFORM
The experimental platform, shown in Figure 6, is
formed by galvanized steel tubes, being a 2” main
tube and another two 1” and 1 1/2” tubes used to
simulate disturbances on the system. The fluid used is
water, which is stored in a 100 liter tank.
3.1 PLC
A Programmable Logic Controller (PLC) can be
defined as an industrial computer that contains
hardware and software used to perform the control
functions. The PLC used in the platform is Siemens
S7-200, and includes a module with CPU 226, a
microcomputer, programming software STEP 7-
Micro/WIN SP9 version 4.0, whose programming is
done in Ladder language, and a PC/PPI
communication cable. In addition, there are a set of
EM231, EM232 and EM235 modules for reading and
triggering the analog inputs and outputs and the ASI
CP243-2 communication module.
3.2 Sensors
Each tube of the platform has its respective pressure
and flow sensors. The flow sensors are turbine
flowmeters and utilize the mechanical energy of the
fluid to rotate a rotor according to the flow. Then the
flow is measured from the rotational speed of this
rotor by means of an externally installed Hall Effect
sensor, Figure 7(a). This Signet Model 8550-1 sensor
also features a measurement transmitter and display
panel, Figure 7(b), powered by a 24V DC source, and
it provides flow ratings from 3 to 38 LPM (liters per
minute).
Development of a Remote Laboratory for Control-engineering Education based on an Industrial Fluid Transport Platform
475
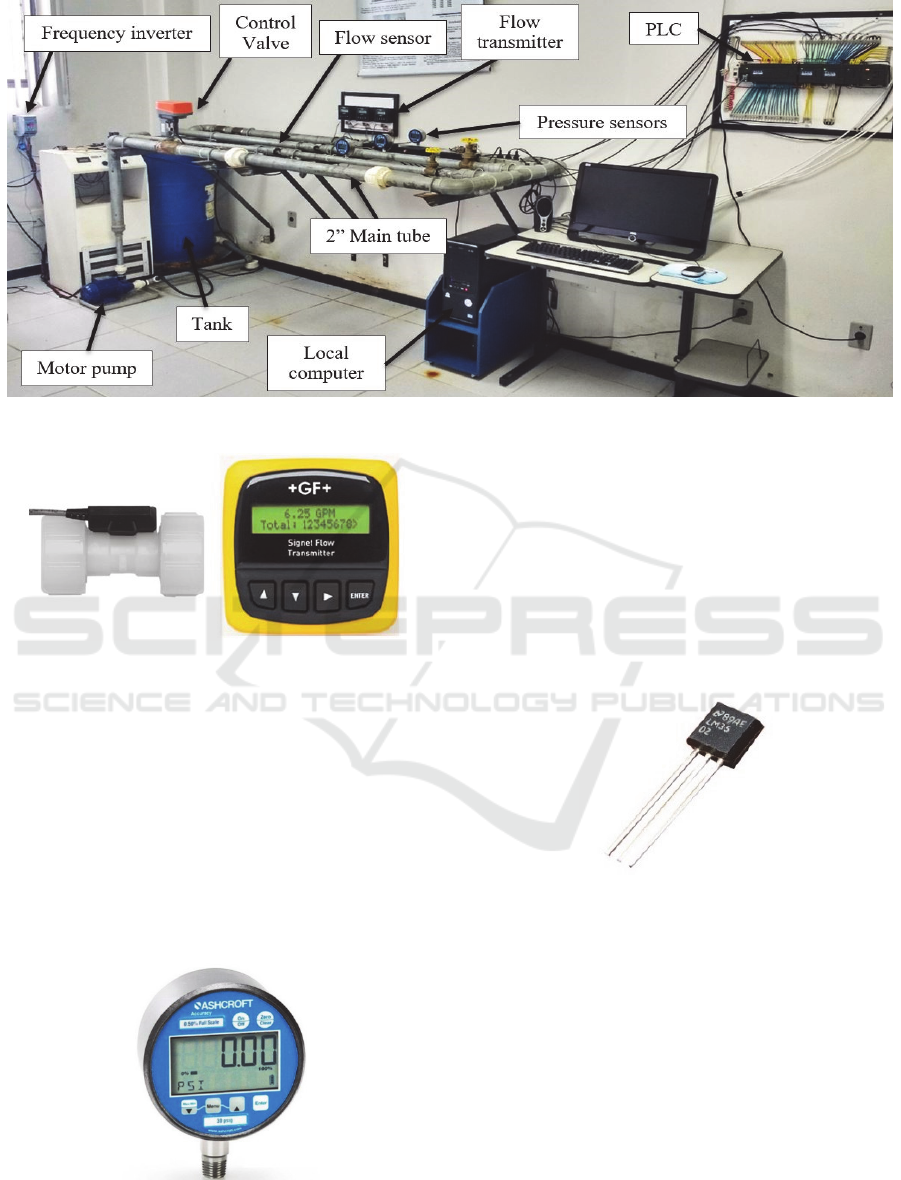
Figure 6: Photograph of the experimental platform.
(a) (b)
Figure 7: (a) Flow sensor; (b) Flow transmitter.
The pressure sensors, as shown in Figure 8, are of
the strain gauge type and are based on the principle of
varying the resistance of a wire. Through the
interconnection of four strips in a Wheatstone bridge
circuit, adjusted and balanced to the initial condition,
it is possible to measure the pressure by means of the
unbalance proportional to the variation of the
resistance of each strip. This instrument, model 2274-
XAO from Ashcroft, offers digital display in 9 units:
psi, mmHg, Pol, Hg, ft, Mpa, KPa, kgf/cm
2
and mBar.
Figure 8: Pressure sensor with an integrated transmitter.
There is also a temperature sensor LM35, Figure
9, of TO-92 encapsulation submerged within the tank.
This is a precision sensor, manufactured by National
Semiconductor, which has a linear voltage output
relative to the temperature when powered by a single
(4-20V DC) or symmetrical voltage source. This
sensor does not require any external calibration to
provide its measurements, having temperature values
ranging from ¼°C or even ¾°C, operating within a
temperature range of -55°C to 150°C.
Figure 9: Temperature sensor.
3.3 Actuators
Regarding the actuators, the main tube has a control
valve, model G250 from manufacturer Belimo. It is a
two-way globe valve with a single seat and a nominal
diameter of 2”. This is a valve with linear motion, as
it has a plug attached to a rod that moves linearly to
the seat, varying the area of passage of the fluid.
The control of the valve is done by an electric
actuator, model NVF24-MTF-E-US of the same
manufacturer. This actuator converts the electrical
power provided by the controller into mechanical
power, changing the relative position between the
plug and the seat. In a fault condition, the valve is
CSEDU 2018 - 10th International Conference on Computer Supported Education
476

fully closed in order to guarantee the safety of the
process. It is powered by a 24V DC power supply
with 5.5W power. The valve and the actuator are
shown in Figure 10.
Figure 10: Control valve and its electrical actuator.
As for the other actuator present on the platform,
there is a frequency inverter, model CFW 080026
S2024 PSZ from the manufacturer WEG, Figure
11(a), which acts on the speed control of a motor
pump, based on frequency variation. The inverter has
a single-phase power supply 200-240V AC, 0.5CV
power, 4 poles with 220V three-phase output. It also
has four digital inputs and one analog input for
communication with the PLC and a resolution of
0.01Hz for frequencies up to 100Hz.
The motor pump, Figure 11(b), is a centrifugal
pump, model P500T hydro bloc from manufacturer
KSB. It has power of 0.5CV in 3500RPM, 2 poles and
three-phase power supply 220 V.
(a) (b)
Figure 11: (a) Frequency inverter; (b) Motor pump.
4 RESULTS
The experience in Engineering teaching has shown
that a complementary approach combining
theoretical and practical activities is vital for effective
and efficient learning (Callaghan et al., 2005). In this
sense, engineering education has incorporated
advances in technologies to promote expected
outcomes and a successful understanding.
4.1 HMI
In this section, the HMI is presented, which allows
on-line interaction between students and the platform,
as well as the results of an experiment performed
through remote access.
In order to implement the remote access to the
study platform, a HMI was developed, allowing a
didactic interaction between the students and the
platform. The tool used was LabVIEW (Laboratory
Virtual Engineering Workbench) software, which is a
development environment for a graphical
programming language developed by National
Instruments.
Programs in LabVIEW are called Virtual
Instruments (VI). Each VI has three components: a
block diagram, a front panel and a connection panel.
The software also has the Remote Panels tool that
converts the application into a remote laboratory,
where the HMI created for the purpose of controlling
and monitoring industrial plant is fully accessible by
the remote user.
The developed interface is divided in three tabs
and in all of them the user can download the collected
data. The first is the Instrumentation tab, Figure 12(a),
in which the user has direct access to all sensors and
actuators present on the platform. From this tab, the
user can perform tests to the industrial process
modeling, to deal with data in a specific software, to
identify the mathematical models and then design the
PID controllers and the decoupling.
The SISO tab, Figure 12(b), allows the user to
perform the SISO control of the experimental
platform loops, while the Multivariable Control tab,
Figure 12(c), allows the user to perform the MIMO
control of the system. Thus, in both tabs the user
enters the parameters of the controllers and
decoupling, defines a set point for the variables of
interest and monitors, in real time, the behavior of the
control system implemented.
Development of a Remote Laboratory for Control-engineering Education based on an Industrial Fluid Transport Platform
477
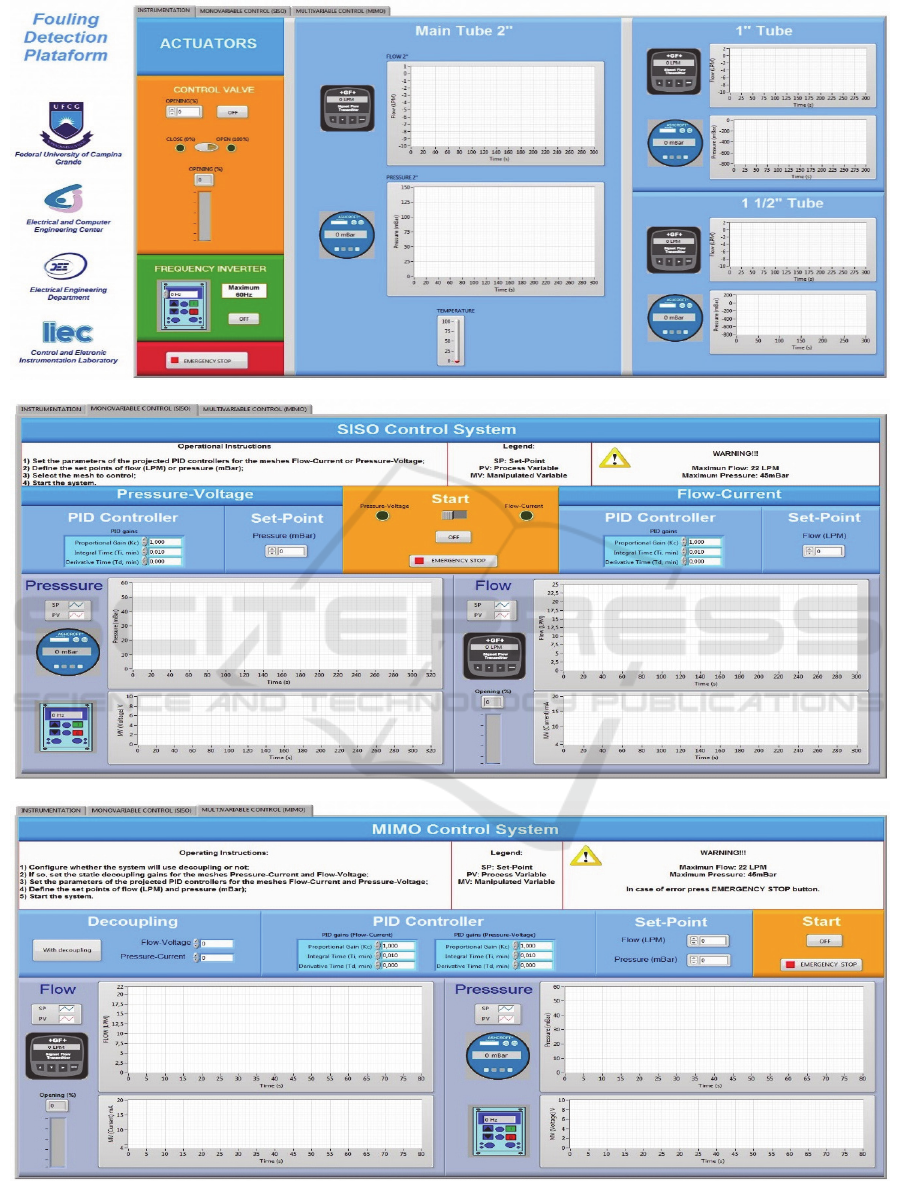
(a)
(b)
(c)
Figure 12: (a) Instrumentation tab; (b) SISO tab; (c) MIMO tab.
CSEDU 2018 - 10th International Conference on Computer Supported Education
478

4.2 Experimental Results
Step response tests were performed in the four loops
of the system: Flow-Voltage, Flow-Current,
Pressure-Voltage and Pressure-Current. The
manipulated variables voltage and current correspond
to the voltage applied to the frequency inverter and
the current applied to the actuator of the control valve,
respectively. The collected data were processed in the
Matlab software and the four identified FOPDT (First
Order Plus Dead Time) models are presented in Table
1.
Table 1: Identified Models.
Loop Transfer Function Model
Flow-Voltage
0.86
9.97 1
.
Flow-Current
21
1.18
18.79 1
6.08
Pressure-Voltage
0.05
5.20 1
.
Pressure-Current
0.04
10.82 1
.
From the models presented, the analysis of the
interaction between the loops of the system was
performed according to the RGA and RNGA criteria,
presented previously. Both methods indicate that the
best parity for control is obtained using the Current-
Flow and Pressure-Voltage loops.
Once the mathematical models of the system were
know and the loops for control were defined, the PID
controllers were designed. The tuning method used
was the one proposed by Ziegler and Nichols,
previously mentioned. The parameters obtained for
the controllers are presented in Table 2.
Table 2: PID Controllers.
Loop Kp T
i
T
d
Flow-Current 3.71 12.17 3.04
Pressure-Voltage 0.62 20.02 5.01
A set of static decoupling, presented in Table 3,
were also calculated for the MIMO control system,
according to Garrido et al. (2011).
Table 3: Static Decoupling.
Decoupling Static Value
D
11
=D
22
1.0000
D
12
-0.7276
D
21
-0.9020
Using the remote access to the platform,
experiments were performed to study the MIMO
control system using static decoupling. In Figures 13
and 14, it is possible to observe the behavior, in real
time, of the system implemented for the Flow-Current
and Pressure-Voltage loops, respectively.
Figure 13: Flow-Current control response.
Figure 14: Pressure-Voltage control response.
This whole experiment was executed via remote
access. It can be noticed that from the initial data
collected it was possible to analyze the process and
design a control system. When implemented, the
control system ensured that the platform operated
within flow and pressure values defined by the user.
4.3 Remote Laboratory
According to National Instruments (2002), a remote
laboratory can be defined as a computer controlled
laboratory, which can be accessed and controlled
externally trough different communication methods.
Thus, a remote lab can be an experiment or process
executed locally on the LabVIEW platform, but with
the ability to be monitored and controlled over the
Internet using the developed HMI.
During the remote access, data acquisition
continues on the local computer, but the remote user
Development of a Remote Laboratory for Control-engineering Education based on an Industrial Fluid Transport Platform
479

has full control over the platform. Other users may try
to access the interface monitor of the application in
progress, but only one client can control the
application at a time. At any time during this process,
the local machine operator can take control over the
application.
The web page of the developed remote laboratory
is shown in Figure 15, is better explained in Melo et
al. (2012).
Figure 15: Non-Destructive Laboratory web page.
5 CONCLUSIONS
In this paper it was presented the implementation of a
remote laboratory for the study of control systems and
industrial automation. One of the great advantages of
the experimental platform used is that different
control strategies can be implemented for both SISO
and MIMO systems in a single environment.
The incorporation of new technologies applied to
teaching, especially to distance education, gives to
students the opportunity to interact at any time with a
real laboratory. Thus, the laboratory not only
illustrates the concepts acquired in theory, but it also
allows students to see how unexpected events and
natural phenomena affect real-world measurements
and control algorithms.
The developed laboratory was tested, as presented
in the subsection 4.2, with an experiment on the
control of the multivariable system with PID
controllers and decoupling devices. However, the
present experiment is only one of many others that
can be performed by students of the disciplines of
Analog Control, Electronic Instrumentation and
Industrial Automation Systems modules in order to
complement the theory seen in the classroom.
ACKNOWLEDGEMENTS
The authors would like to thank the National Council
for Scientific and Technological Development
(CNPq) for financial support and everyone from the
Control and Eletronic Instrumentation Laboratory
(LIEC –UFCG) who supported the development of
this work.
REFERENCES
Bristol, E. (1966). On a New Measure of Interaction for
Multivariable Process Control. IEEE Transactions on
Automatic Control. IEEE, pp. 133-134.
Callaghan, M., Harkin, J., Gueddari, M., McGinnity, T. and
Maguire, L. (2005). Client-Server Architecture for
Collaborative Remote Experimentation. Proceedings of
the Third International Conference on Information
Technology and Applications. Sydney: IEEE.
Garrido, J., Vázquez, F. and Morilla, F. (2011). Generalized
Inverted Decoupling for TITO processes. 18th IFAC
World Congress. Milano, pp. 7535-7540.
He, M., Cai, W., Ni, W. and Xie, L. (2009). RNGA based
control system configuration for multivariable
processes. Journal of Process Control, 19. ELSEVIER,
pp. 1036-1042.
Ljung, L. and Glad, T. (2016). Modeling and Identification
of Dynamic Systems. Lund: Studentitteratur, pp. 19-27.
Mansoori, G. Ali. (2002). Physicochemical Basis of
Fouling Prediction and Prevention in the Process
Industry. Journal of the Chinese Institute of Chemical
Engineers. Vol. 33, No. 1, pp. 25-31.
National Instruments. (2002). Distance-Learning Remote
Laboratories using LabVIEW. Available at:
http://discoverlab.com/References/WP238.pdf
[Acessed 10 Sept. 2017].
National Instruments. (2011). PID Theory Explained.
Available at: http://www.ni.com/white-paper/3782/en
[Acessed 09 Sept. 2017].
Ogata, K. (2009). Modern Control Engineering. 5th ed.
Upper Saddle River: Prentice Hall.
Melo, T. R., Bezerra, M. M., Silva, J. J. and Neto, J. S. R.
(2012). Experimental Tests in non-destructive
laboratory – On-line Experiment: Monitoring Sensors.
In Proceedings of the 4th International Conference on
Computer Supported Education – Volume 2: CSEDU,
pp. 345-348.
Rose, J. (1995). Recent advances in guided wave NDE. In:
Proceedings of the IEEE Ultranic Symposim. Seattle:
IEEE, pp. 761-770.
Skogestad, S. and Postlehwaite, I. (2005). Multivariable
Feedback Control: Analysis and Design. Hoboken:
Wiley, pp. 2-5.
Ziegler, J. and Nichols, N. (1942). Optimum Settings for
Automatic Controllers. Journal of Dynamic Systems,
Measurement, and Control, 115(2B), pp. 220-222.
CSEDU 2018 - 10th International Conference on Computer Supported Education
480
