
Anticipating Driver Actions via Deep Neural Networks and New
Driver Personalization Technique through Transfer Learning
Sahim Kourkouss, Hideto Motomura, Koichi Emura and Eriko Ohdachi
Automotive & Industrial Systems Company, Panasonic Corporation, Osaka, Japan
Keywords: Autonomous Driving, Self-Driving Cars, Driver Monitoring, Driver Behaviour, Deep Learning, Transfer
Learning.
Abstract: Anticipating driving behaviours is a promising technology for novel advanced driver assistance systems. In
recent years, predicting a driver’s future action became an important element to preventive safety
technologies and has been advancing greatly contributing to a reduction in road accidents. In this paper, we
propose a deep learning network that anticipates driving actions based on information of subject vehicle as
well as surrounding vehicles and environment. By re-using a network trained on a great number of various
drivers’ data with different driving behaviours and linking it to a particular driver with particular taste we
propose a method that enables the anticipation of driving behaviours that can be tailored to each driver
individually, leading to improved user experiences. We experimentally test our method for acceleration,
deceleration and brake profile anticipation task using actual driving data. Our results demonstrate the
effectiveness of our approach, achieving a great improvement when anticipating for individuals.
1 INTRODUCTION
For the past hundred years, innovation within the
automotive sector has brought major technological
advances, leading to safer, cleaner, and more
affordable vehicles. In recent years, the industry
appears to be on the verge of a revolutionary change
engendered by the advent of autonomous or “self-
driving” cars.
While recent generations of cars have already
driver-assist systems that offer, for example, greater
vehicle autonomy at lower speeds as well as reduce
the incidence of low impact crashes, it is expected
that by 2020, most cars will be able to self-perform
multiple tasks such as acceleration, steering and
braking simultaneously. Realizing such technology
is a challenging task and many problems have been
reported (Cabinet Office Japan, 2016; Inagaki,
2015). One of the most important tasks faced is the
ability to anticipate future events. Humans use the
art of anticipation in every interaction, every
movement and every thought without realizing it. If
human drivers did not have the ability to anticipate
events, we would frustrate or embarrass those we
interact with and be in many more car accidents.
One other important task is the ability to
accommodate the way the car drives itself to every
driver’s taste, especially for levels 2 to 3
autonomous driving where the driver is still involved
in the vehicle’s control. Even if perfect self-driving
were to be accomplished, that would only be a “one-
size fits all” kind of self-driving, which can result in
the driver getting bored and intervening with the
driving operation. Therefore, the self-driving
function would end up being be a useless option.
In this paper, we present a deep learning model
that, by learning the driver's behaviour patterns, can
anticipate the next driving action based on the
driver’s likings.
The remainder of the paper is structured as
follows. First, in section 2 we give a brief review of
previous works on driving behavior anticipation. We
then focus in Section 3 on the usage of deep learning
algorithms for predicting driving action behaviours,
and test it using a simple lane change anticipation
problem. Section 4 describes and formalises our
method for accommodating driving action
anticipation to individual driver’s likings, which we
then experimentally test on actual driving data in
Section 5. Finally, Sect.6 draws up conclusions and
suggests possible directions for further research on
this topic.
Kourkouss, S., Motomura, H., Emura, K. and Ohdachi, E.
Anticipating Driver Actions via Deep Neural Networks and New Driver Personalization Technique through Transfer Learning.
DOI: 10.5220/0006669002690276
In Proceedings of the 4th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2018), pages 269-276
ISBN: 978-989-758-293-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
269
2 RELATED WORK
Nowadays, most of the cars available in market
come equipped with a variety of cameras and
sensors to monitor the surrounding environment and
driver status. Through multi-sensory fusion, they
provide many assistive features like Lane Keeping
Assistance (LKA), Automatic Emergency Braking
(AEB), and Adaptive Cruise Control (ACC) etc.
These systems warn drivers when they perform a
potentially dangerous manoeuvre (Shia et al., 2014;
Vasudevan et al., 2012).
Driver status monitoring for distraction and
drowsiness as well as anticipation of driving
behaviour, have also been thoroughly researched
(Fletcher et al., 2005; Rezaei and Klette, 2014;
Herrmann, 2012), and many works have been exten-
sively studied. For example, Volkswagen’s Bayesian
network anticipates from the vehicle speed and the
driver’s face direction, whether or not to turn right at
a general road intersection while on manual mode
driving, and the accuracy is reported to be at 98%.
In addition, BMW's Bayesian network (Liebner,
2013) can anticipate right turn, left turn or straight
forward at a general road intersection using driving
operations, lane information, GPS etc. Here an
accuracy of 98%, 88%, 86% for straight forward,
right turn and left turn respectively, has been
reported.
However, all the above researches are fitted for
“Average-Driver behaviour” and do not respond to
each driver’s likings.
In this paper, we present a deep learning model
that, by learning the driver's behaviour patterns, can
anticipate the next driving action based on the driver’s
likings. Our work complements existing ADAS and
driver monitoring techniques by anticipating
manoeuvres several seconds before they occur.
3 DRIVING ACTION
PREDICTION
3.1 Situation Definition Parameters
In this paper, we define a driving action as one of
the following driving operations: lane keeping,
acceleration, deceleration and lane change.
In addition, in order to anticipate driving
behaviour, we need to define proper parameters to
describe driving situations. We examine the
parameters that might affect driving behaviours in
each driving scene in reference to the seven scenes
mainly encountered on a highway as defined by
NHTSA (lane keeping / lane change / interchange /
branching / junction / lane decrease / emergency
vehicle) (NHTSA, 2014).
As a result, we narrow the parameters down to
the ones that have the most impact on a driving
action and these are:
Subject vehicle information: Car speed, brake,
steering wheel information, etc.
Surroundings information: Inter-vehicle distance,
angle, relative speed, surrounding vehicles type,
status etc.
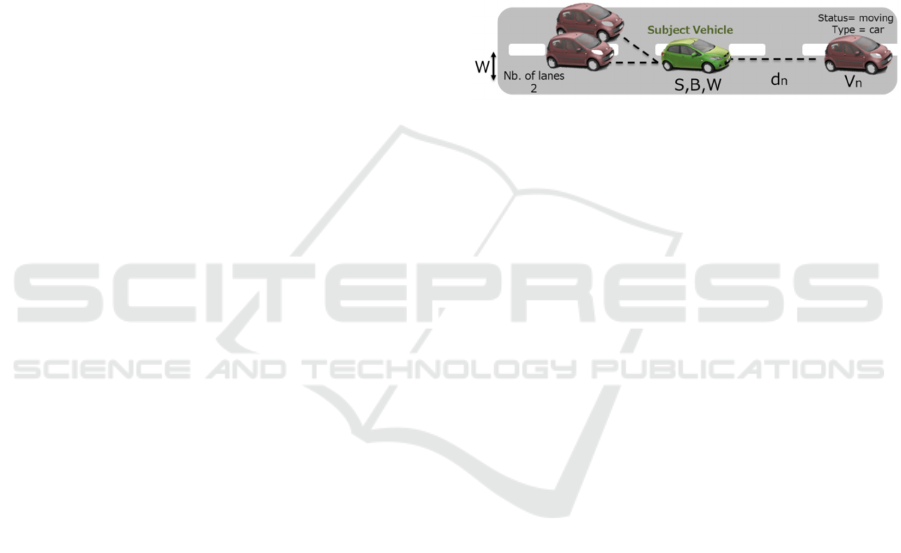
Road information: Lane width, number of road
lanes. (Figure 1).
Figure 1: Driving Situation parameters. Subject vehicle
speed S, brake status B and wheel information W, the
inter-vehicle distance d
n
, the relative speed V
n
, type and
status of the surrounding vehicles, lane width W and
number of lanes.
3.2 Stacked Auto-encoder Network
In this paper, we use a deep neural network model
for the driving behaviour anticipation task.
Neural networks are a set of algorithms,
modelled loosely after the human brain, that are
designed to recognize patterns. They interpret
sensory data through a kind of machine perception,
labelling or clustering raw input.
Deep Learning is a type of Neural Network
Algorithm that takes metadata as an input and
processes it through a number of layers of a non-
linear transformation of the input data to calculate
the output. This algorithm has a unique feature
which is automatic feature extraction. This means
that deep learning algorithms automatically grasp
the relevant features required for the solution of the
problem. This reduces the burden on the
programmer to select the features explicitly. This
can be used to solve supervised, unsupervised or
semi-supervised type of problems. Therefore, by
assuming that driving cases that occurred in the past
can and will occur in the future for resembling
conditions, deep learning can extract anticipation
rules by analysing sets of past driving cases for said
conditions and then predict driving behaviour for
same conditions a few seconds before they occur.
Neural networks exist in all shapes and sizes, and
are often characterized by input and output data type.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
270
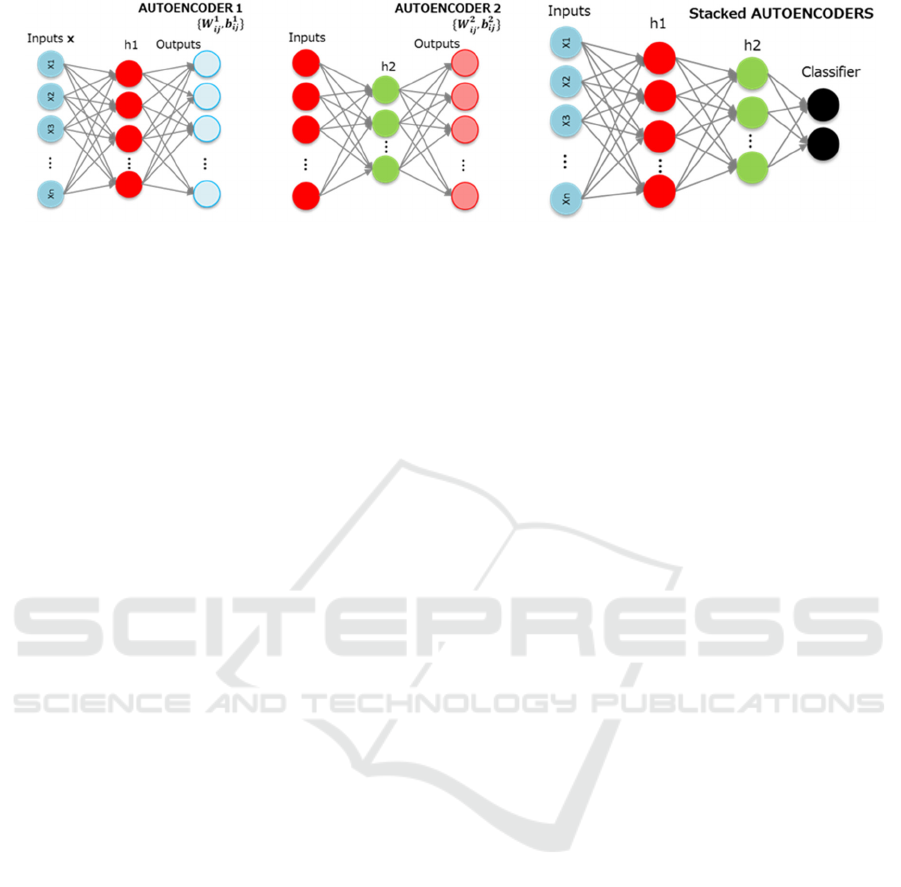
Figure 2: Network for predicting future actions. First, train the first autoencoder individually using backpropagation. Then
use the first autoencoder’s hidden layer as input of a second autoencoder and train. We repeat this procedure for all the
network’s layers. Finally, we add a softmax classifier that can classify future driving behaviour to the last layer and train
using backpropagation.
An autoencoder neural network is an
unsupervised learning neural network algorithm that
applies backpropagation, setting the output values to
be equal to the inputs. They work by projecting the
input into a latent-space representation, and then
reconstructing the output from this representation.
By placing constraints on the network, such as
limiting the number of hidden units or adding noise
to input and train to reconstruct the input from a
corrupted version of itself (Denoising Autoencoder),
interesting structure about the data can be discovered.
It is difficult for humans to understand all the
principles and aspects of driving behaviours, and
autoencoder neural network, can be considered as an
effective means for our task. By training and
“stacking” such autoencoders in a greedy layer-wise
fashion for pre-training, we can initialize a regular
neural network and train it in a supervised manner.
Here in this paper, we train such Stacked Auto-
encoder network using the information of subject
vehicle and surrounding vehicles mentioned in 3.1.
3.3 Training
As for the learning procedure, let
ij
,
ij
denote
the parameters
,
of the nth layer of our
network where i and j are the number of inputs and
outputs respectively at the nth layer. First we
perform an unsupervised training on a denoising
auto encoder and obtain the first learning
parameters
1
,
1
, where the hidden layer h1 is
connected to the input x by a weight matrix
forming the encoding step. The hidden layer then
outputs to a reconstruction vector
, using a tied
weight matrix
to form the decoder,
f
(1)
f
′
(2)
The activation function is f and b is the bias term.
We use the mini-batch stochastic gradient
descent (SGD) for the training procedure. Learning
occurs via backpropagation using the following error
function,
E
log
1
log1
(3)
Next, we input the above parameters to the
second layer of the auto encoder and perform an
unsupervised training. The second learning
parameters
2
,
2
are then obtained. In the same
way, we repeat this learning process for the every
layer by using the parameters from the intermediate
layer of the previous auto encoder as an input.
After completion of the above learning phase (i.e.
pre-training phase) , all the trained layers are stacked
on each other, and the learning parameters of each
layer obtained are set as initial values of a new
neural network. Then, by adding a softmax classifier
that can classify future driving behaviour, it is
possible to obtain a multi-layered neural network.
Finally, by performing a fine tuning phase, we
update the parameters of the entire network with
supervised learning. We illustrate this network in
Figure 2.
3.4 Evaluating Our Model
Before moving on to our proposed method, which is
to accommodate driving action prediction to the
driver’s likings, we try to evaluate our model’s
prediction performances for average driver
anticipation. Here, we use the lane-change
anticipation task as an experimental ground to
evaluate the performance of our model.
Anticipating Driver Actions via Deep Neural Networks and New Driver Personalization Technique through Transfer Learning
271
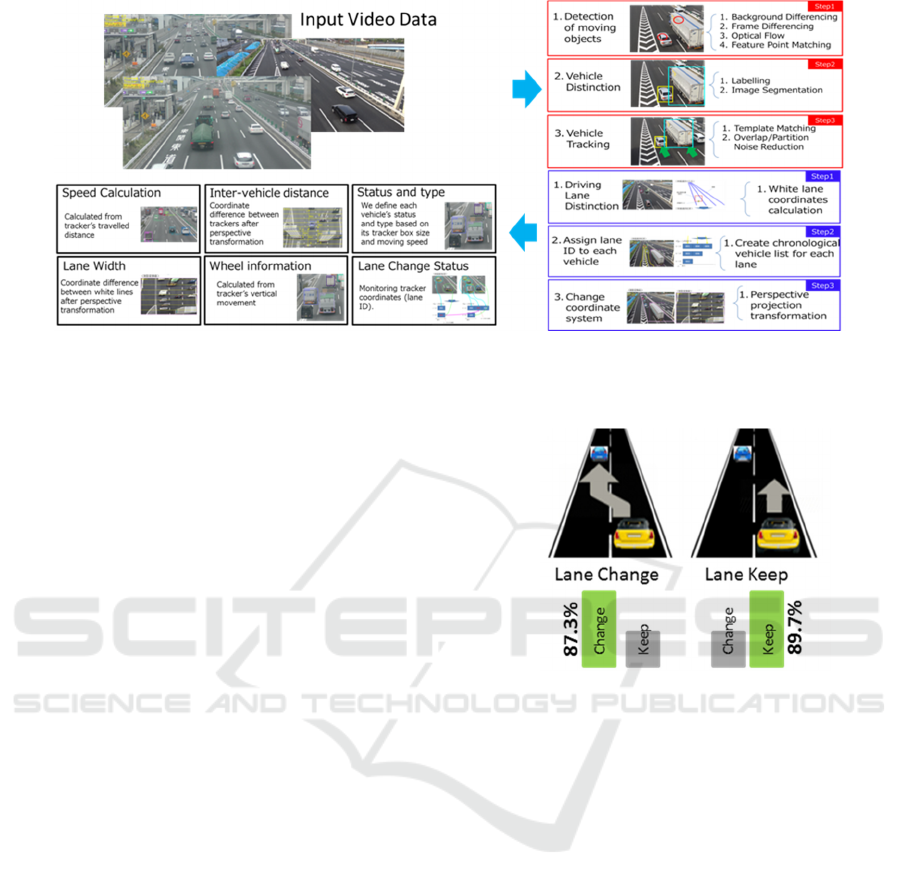
Figure 3: Training data parameters extraction process. We use conventional image processing techniques to track each
vehicle appearing in the video data captured from a fix bird eye’s view camera. Then we calculate the vehicle information
necessary for our model as mentioned in 3.1.
Data Collection: In order to perform this
evaluation, instead of installing a variety of multiple
sensors on cars and hiring actual drivers to collect
the data, which can be a very time-consuming and
costly process, we opted to use video data of a
different roads traffic that we captured by a fix
bird’s eye view high resolution camera.
And by analysing and processing these images,
we extract the desired training and testing
information data mentioned in 3.1. The extraction
method is performed using various conventional
image processing methods, but we won’t go into
deeper explanations considering that it is not the
main purpose of this paper. A simple diagram of the
data extraction process is shown in Figure 3.
We use 500 lane change cases for training and
150 cases for test. Our model has 200 units in the
input layer, 2 hidden layers of 100 units each, and 2
units in output layer.
Experiment Results: We evaluate this model
based on its correctness in predicting future lane
changes. The anticipation is performed offline for
each frame at 30fps where the algorithm processes
the recent 2 seconds (60frames) context and assigns
a probability to each of the two actions (lane change/
lane keep) happening 2 seconds (60frames) later.
We show the prediction results in Figure 4. Of
the 150 cases where lane change occurred, 131 were
successfully anticipated and the anticipation rate was
87.3%. On the other hand, 134 lane keep cases were
anticipated out of 150, and the anticipation rate was
89.3%.
Using stacked autoencoders seems to perform well
for the lane change anticipation, when compared to
other methods (Li et al., 2015; Hou et al., 2013), even
in this case where training data amount is too few.
Figure 4: Classification performance for lane change
anticipation. Lane change is anticipated 2 seconds before
it occurs. Anticipation rate is 88%.
4 ACCOMMODATING
ANTICIPATION FOR
INDIVIDUALS
As mentioned before, one of the most important
tasks that self-driving faces is the ability to
accommodate the way the car drives itself to every
driver’s taste. Here, we explain how to predict each
driver’s next action based on his own likings.
4.1 Transfer Learning
Traditional data mining and machine learning
algorithms make predictions on the future data using
statistical models that are trained on previously
collected labelled or unlabelled training data (Yin et
al., 2006; Baralis et al., 2008). Nevertheless, most of
these assume that the distributions of this labelled
and unlabelled data are the same.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
272
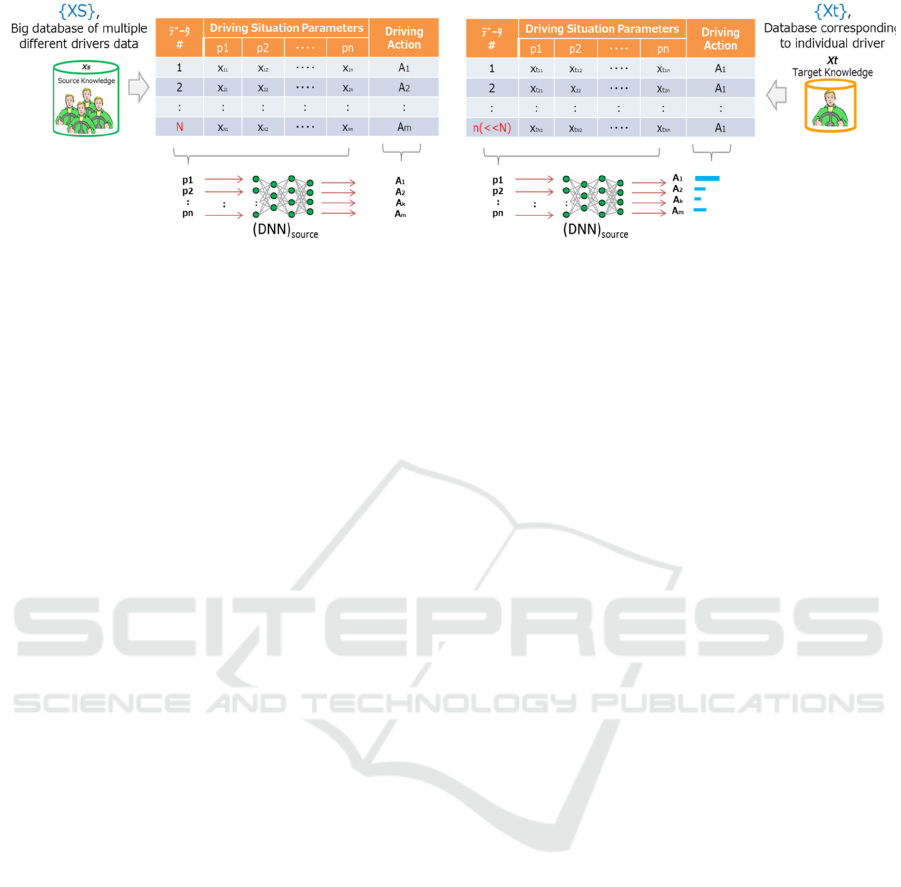
Figure 5: Method Diagram: First we train a stacked autoencoder NN on a big database of multiple different drivers {Xs}.
This network predicts future driving actions and performs well for an “average” driver. Next we input individual data {Xt}
into the network and compute output histograms (which is a representation of individual’s driving characteristics). Finally,
we re-train the network with said individual data to tune the parameters and adapt the model to said individual.
Transfer learning, in contrast, allows the domains,
tasks, and distributions used in training and testing
to be different.
Many examples of transfer learning have already
been reported. For example Oquab et al. (Oquab et
al. 2014) trained convolutional neural network
(CNN) with the ImageNet (Deng et al., 2009) as the
source knowledge. After training the CNN, they re-
use the parameters from the input layer on the mid-
level hidden layer. Then, they add a new layer and
tune the parameters using the target knowledge.
Also, in the medical domain, medical image datasets
such as X-ray CT image datasets are hard to collect
and do not have enough data for training the deep
neural networks mainly because of privacy problems.
Therefore, different datasets are used as source
knowledge in order to solve a certain different target
task (Sawada et al. 2015). The study of Transfer
learning is motivated by the fact that people can
intelligently apply knowledge learned previously to
solve new problems faster or with better solutions.
4.2 Proposed Method
In this section, we propose a method that re-uses the
network trained on a great number of various drivers
data with different driving behaviors (henceforth:
source knowledge) to improve driving behavior
anticipation performance for every particular driver
even in the case if we have only few information on
said particular driver (target knowledge).
First, we train a stacked autoencoder neural
network (DNN)
source
for anticipating driving
behaviors using the source knowledge (i.e. a great
number of various drivers data with different driving
behaviors), as mentioned in the previous chapter.
We note the parameters trained on the source
knowledge as
,
source
.
Secondly, we evaluate the relation between the
source knowledge {Xs} and the target knowledge
{Xt} corresponding to each individual driver data.
To evaluate the relation between source and target,
we input the target knowledge {Xt} into the deep
neural network (DNN)
source
trained on the source
knowledge. Then, we compute the histograms based
on the response of the output layer. After computing
the histograms, we select the variables of the output
layer corresponding to the target domain. And
finally, we tune the parameters
,
source
in such a
way that the selected variables respond as the
outputs of the target knowledge.
It should be noted that the tuning of
W
S
corresponds to the re-training of the deep neural
network (DNN)
SRC
using the parameters
W
S
as initial
parameters and {Xt} as training data. We show our
method diagram in Figure 5.
5 EXPERIMENTAL RESULTS
In this section, for the purpose of theoretical
confirmation of our method, we perform two
different experiments using real vehicle driving data.
In the first experiment, we try to anticipate each
driver’s acceleration/deceleration behavior a few
seconds before they occur. While on the second
experiment in hope of getting more individual
variability, we set our target to anticipating the
braking profile of a driver. Below are the full details.
5.1 Car Speed Anticipation
Acceleration/deceleration (A/D) behaviour of
vehicles is important for various applications like the
determination of yellow light length at inter-section,
ramp design etc. But it is also a very important
Anticipating Driver Actions via Deep Neural Networks and New Driver Personalization Technique through Transfer Learning
273
aspect that can define a pleasant drive and that varies
from driver to driver. Here, we try to anticipate each
driver’s A/D behaviour based on his likings.
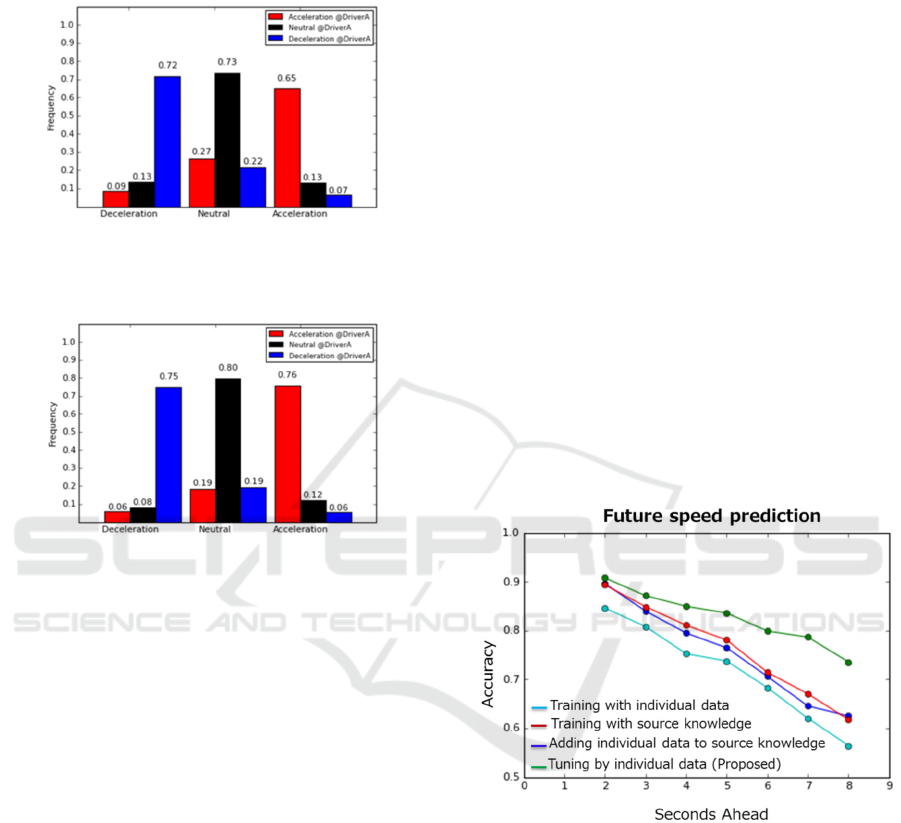
Figure 6: Histogram of relation between multiple various
driver data (source knowledge) and individual Driver A
data (target knowledge).
Figure 7: Experimental results shows improvement in
anticipation accuracy for driver A by 3% for deceleration,
11% for acceleration and 7% for neutral status.
5.1.1 Experiment Overview
We use 150 hours of driving data from 30 different
drivers as our source knowledge X
S.
We use a
separate 5 hours of driving data of a different 31
st
driver (“driver A”) as the target knowledge Xt
A
.
We define an acceleration/deceleration (A/D)
behavior as an increase/decrease in speed by 3km/h
within a 5seconds time period respectively, while a
change of speed of less than 3km/h is counted as a
neutral status.
In this experiment, our prediction model has 440
units in the input layer, 1000 units in the first and
second hidden layer, and 3 units in output layer. We
evaluate this model based on its correctness in
predicting future (A/D) actions. A separate driving
data of driver A which is not included in Xt
A
is used
for test. We anticipate actions every 0.5 seconds
where the algorithm analyzes the recent driving
context and outputs a probability to each of the three
driving behaviors: acceleration, deceleration and
neutral status that will occur 2 seconds in the future.
Figure 6 shows the computed histograms of the
relation between source knowledge (i.e. A/D
behavior based on multiple drivers’ data trained
network) and target knowledge (A/D behavior of
driver A). The red, black and blue bars represent the
frequency of acceleration, neutral status and
deceleration respectively, for said particular driver A.
As it is shown here, if we take for example the
acceleration behavior, 36% of driverA’s acceleration
maneuvers were anticipated as deceleration or
neutral status. In other words, a model trained by the
source knowledge contains information from
multiple various drivers and can be used to
anticipate actions for an “average” driver, which
does not perform so well for said particular driver A.
Next, we select the appropriate variables of the
output layers that relate to the source knowledge X
S
trained model (henceforth called average driver
model), then we tune the network parameters by re-
training the model using driver A data while keeping
the average model initial parameters.
Figure 7 shows the histograms of the new
relation between “driverA-accommodated” source
knowledge and target knowledge. Experimental
results show that our proposed method improves
anticipation accuracy for said driver A by an average
of 7%.
Figure 8: Proposed method performance compared to
conventional methods. Our method shows better results
for predictions at near and distant times in the future.
5.1.2 Performance Comparison
We compare our method to the following 3 cases:
(a) Using small amount of individual data for
training (10 times fewer than source knowledge).
(b) Using source knowledge for training (i.e. average
driver model)
(c) Adding individual data to source knowledge and
performing training (non-transfer).
In the experiment above, we tried to anticipate
driver A/D actions by predicting the car’s speed
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
274
behavior 2 seconds before occurring. Here, for the
sake of completeness, we also evaluated our method
for longer and shorter future time periods. Figure 8
shows the evaluation results.
Our method shows better results for predictions
at near and distant times in the future. It is also
worth pointing out that the closer the future we are
trying to anticipate, the less likely it is for different
drivers to take different actions, while on the other
hand the further we go in the future driving
behaviors become more likely to vary depending on
the person driving. This explains the reason why our
method performs better for distant future predictions.
5.2 Brake Profile Anticipation
The application of the brakes is one of, if not the
most affecting, driving action that separates a
pleasurable drive from an average or unpleasant one.
While some drivers prefer to brake long and
slow, depending on the driving situation a fair share
of drivers also enjoy a faster and more aggressive
braking.
Predicting the way a car brakes is an important
task in order to accommodate self-driving cars to the
driver’s taste.
In this experiment, we propose a model that
calculates a braking profile depending on the
surrounding situation and that can be tailored to each
driver’s liking.
5.2.1 Experiment Overview
We use the same driving data mentioned in 5.1.1, a
total of 150 hours of driving performed evenly by 30
different drivers, in addition to another 5 hours from
a different driver A. But in order for our model to
get a better capture of braking features, we limit our
data to brake-scenes only, and then extract the
braking profiles to be used as training data.
We conduct our experiment on predicting the
car’s deceleration profile at the event of when brake
pedal is hit. It is also important to mention that we
consider the distance to complete stop (i.e. distance
to stop line or front car) as a known parameter. Thus,
by calculating the time to complete stop, we
anticipate the car’s speed at n different intervals in
the future. In this experiment we set n to 10. We
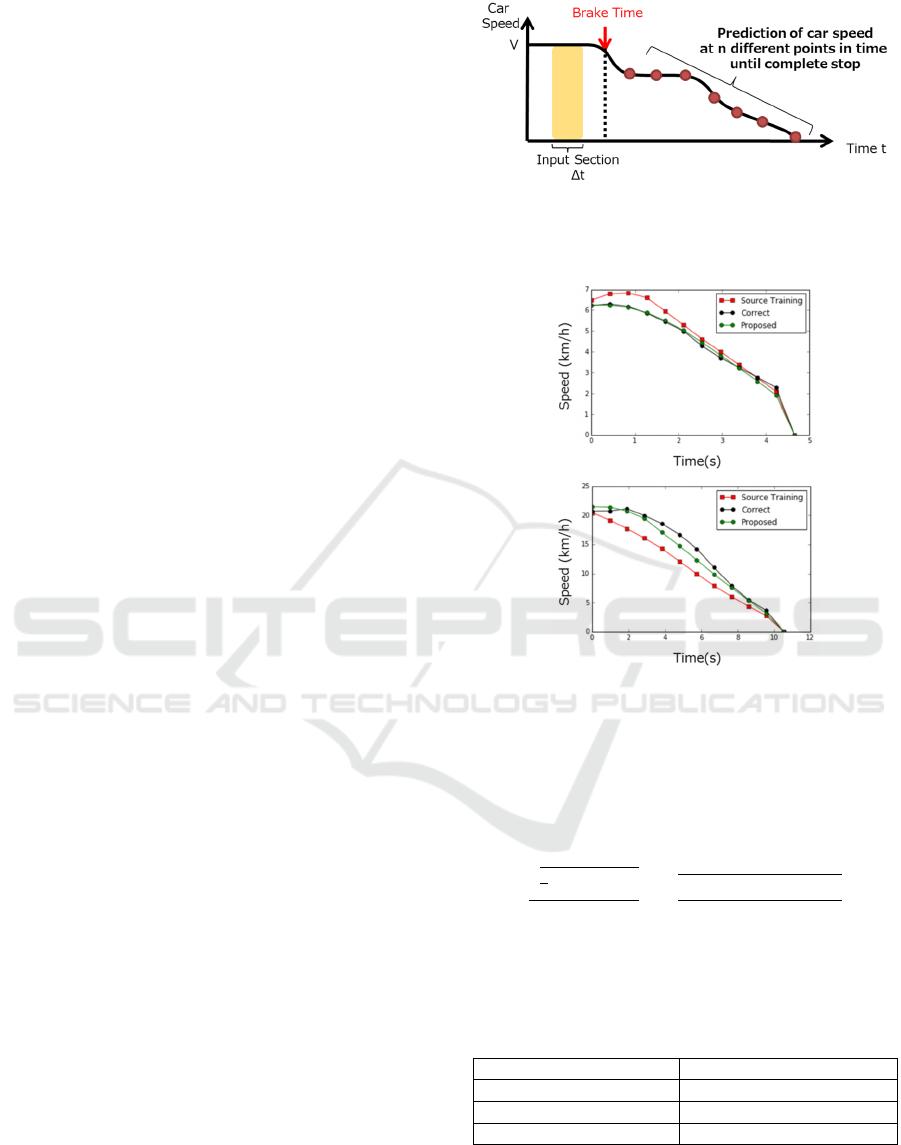
illustrate the definition of a brake profile in Figure 9.
In this experiment, our model has 450 units in
the input layer, 1000 units in the first and second
hidden layer, 500 units in the third layer and 10 units
in output layer. We use {Xs} = 10000 and n = 10,
and {Xt} = 1000.
Figure 9: Brake Profile: At the event of a brake, our model
anticipates car speed at n (=10 in this experiment)
different points in time until complete stop of the vehicle.
Figure 10: Samples of braking profile prediction: We
compare our proposed model (green line) to average driver
model (Red). The black line shows the actual brake profile.
Our proposed method shows better results for short and
long time brakes.
We train the deep neural network using the
following objective function,
E
∑
∑
(4)
where y is the true value and y the predicted value.
is the differential between observation i and
i-1.
Table 1: Brake profile prediction model comparison.
Model RMSE
value
+RMSE
shape
{Xs} Trained 0.259
{Xs+Xt} Trained 0.240
Proposed 0.226
5.2.2 Experiment Results
Here, we consider two different aspects for evaluat-
ing our braking profile anticipation performance. We
Anticipating Driver Actions via Deep Neural Networks and New Driver Personalization Technique through Transfer Learning
275

calculate the Root Mean Square Error (“RMSE”) of
the predicted values to measure our prediction in
term of real values, and also we calculate the RMSE
of the differential between observations to evaluate
how well the prediction fits the “shape” of the brake
profile.
We use a separate driving data of driver A as test
data. The prediction accuracies of the average model
driver trained with {Xs}, the average model driver
trained with {Xs+Xt} and the driver A tuned model
using our method mentioned in 4.2 are shown in
Table 1. Figure 10 shows two examples of brake
profile predicted with our method. Our method
improves prediction accuracy by 12.5%.
6 CONCLUSIONS
In this paper, we considered the problem of
anticipating driving actions a few seconds before
they are performed. Our work also enables greater
comfort and satisfaction by crafting user experiences
sensitive to individual driver preferences.
We proposed a deep learning network that
anticipates driving behavior estimation based on
information of subject vehicle as well as surrounding
vehicles and environment.
We use the lane change
anticipation task as an experiment ground to confirm
the theory of our anticipation model, and we
accomplished an accuracy of 88%.
We proposed a method which enables the
anticipation of driving behaviors that can be tailored
to each driver, leading to improved user experiences.
Our method re-uses a network trained on a great
number of various drivers’ data with different
driving behaviors and links it to a particular driver
with particular taste to train a new model fitted to
said driver.
We confirm our theory by predicting individual
driver acceleration/deceleration behaviors as well as
braking profiles a few seconds before occuring. Our
method shows better results compared to
conventional methods where individual data quantity
is too few (around 1/10 of the source knowledge).
Furthermore, by applying this technology, we
believe that estimating other than driving actions is
also possible. For example, by analyzing driving
behavior history or monitaring the driver’s state and
condition, it is possible to predict dangerous driving
operations. We also think that building an ideal
personalized driver model by using the driving
behavior history of the model driver, can realize safe
and comfortable driving support.
REFERENCES
HMI-TF briefing report, 2016, SIP Autonomous driving
promotion committee 22-3-1-1, Cabinet Office,
Government of Japan.
Inagaki, T., 2015, Human-Machine Collaboration in
Automated Driving, IA TSS Review Vol.40, No.2.
Shia, V., Gao, Y., 2014, Semiautonomous vehicular
control using driver modelling. IEEE Transactions on
Intelligent Transportation Systems, 15(6).
Vasudevan, R., Shia, V., 2012, Safe semi-autonomous
control with enhanced driver modeling. In ACC.
Fletcher, L., Loy, G., 2005, Correlating driver gaze with
the road scene for driver assistance systems. Robotics
and Autonomous Systems, 52(1).
Rezaei, M., Klette, R., 2014, Look at the driver, look at
the road: No distraction! no accident! IEEE CVPR.
Herrmann, (Volkswagen), 2012, Situation analysis for
driver assistance systems at urban intersections,
Vehicular Electronics and Safety (ICVES), IEEE
International Conference on ,P.151.
Liebner, (BMW) , 2013, Generic driver intent inference
based on parametric models, 16th International IEEE
Conference on Intelligent Transportation Systems
(ITSC) ,P.268.
NHTSA, 2014, Human Factors Evaluation of Level2 and
Level3 Automated Driving Concepts, DOT HS 812044.
Hou, Y., Edara, P., 2013, Modeling Mandatory Lane
Changing Using Bayes Classifier and Decision Trees
IEEE Transactions on Intelligent Transportation
Systems ( Volume: 15, Issue: 2, April 2014 ).
Li, L., Zhang, M., 2015, The application of Bayesian filter
and neural networks in lane changing predictions, 5
th
international Conference on Civil Engineering and
Transportation , ICCET2015.
Yin, X., Han, J., 2006, Efficient classification across
multiple database relations: A crossmine approach,
IEEE Transactions on Knowledge and Data
Engineering, vol. 18, no. 6, pp. 770–783, 2006.
Baralis, E., Chiusano, S., 2008, A lazy approach to
associative classification, IEEE Transactions on
Knowledge and Data Engineering,vol. 20, no. 2, pp.
156–171.
Oquab, M., Bottou, L., 2014, Learning and transferring
mid-level image representations using convolutional
neural networks,". CVPR 2014. Proceedings of the
2014 IEEE Computer Society Conference on, pp.18.
Deng, J., Dong, W., 2009, Imagenet: A large scale
hierarchical image database 2009. CVPR 2009. IEEE
Conference on IEEE, pp.248.
Sawada, Y., Kozuka, K., 2015, Transfer Learning Method
using Multi-Prediction Deep Boltzmann Machines,
Machine Vision Applications (MVA), 2015 14th
IAPR International Conference.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
276
