
Improvements to DEM Merging with r.mblend
Lu
´
ıs Moreira de Sousa
1
and Jo
˜
ao Paulo Leit
˜
ao
2
1
ISRIC - World Soil Information, Droevendaalsesteeg 3, Building 101, 6708 PB Wageningen, The Netherlands
2
Swiss Federal Institute of Aquatic Science and Technology (EAWAG),Urban Water Management Department (SWW),
¨
Uberlandstrasse 133, CH-8600, Dubendorf, Switzerland
Keywords:
Digital Elevation Model (DEM), Terrain Analysis, Raster.
Abstract:
r.mblend is an implementation of the MBlend method for merging Digital Elevation Models (DEMs). This
method produces smooth transitions between contiguous DEMs of different spatial resolution, for instance,
when acquired by different sensors. r.mblend is coded on the Python API provided by the Geographic
Resources Analysis Support System (GRASS), being fully integrated in that GIS software. It introduces
improvements to the original method and provides the user with various parameters to fine tune the merging
procedure. This article showcases the main differences between r.mblend and two conventional DEM merge
methods: Cover and Average.
1 INTRODUCTION
In the Geographic Information Systems (GIS) dom-
ain, the representation of terrain elevation has been
predominantly performed using the raster data format,
in what are called Digital Elevation Models (DEMs).
The discretisation of elevation by a regular grid is rat-
her useful in software development, with a direct cor-
respondence to a two dimensional array. This ease
of development has fostered the creation of numerous
spatial analysis methods (de Smith et al., 2015), ma-
king DEMs ever more convenient.
DEMs have traditionally been acquired by stereo-
scopic sensors on board of air-borne or space-borne
vehicles. For decades DEMs remained an expen-
sive and inaccessible type of data. The emergence of
technologies like Light Detection and Ranging (Li-
DAR) sensors, and small and easy to operate Unman-
ned Aerial Vehicles (UAVs) have made the acquisition
of high resolution DEMs considerably simpler and in-
expensive (K
¨
ung et al., 2011).
With multiple DEMs obtained by different met-
hods and at different spatial resolutions available, spa-
tial analysts often face today the need to combine or
merge various of these data sets. However, there is no
obvious method for doing so; a direct merge of over-
lapping DEMs produces artefacts along borders, lea-
ding to inconsistent terrain aspects and slopes (Katzil
and Doytsher, 2005; Luedeling et al., 2007). Spatial
analysis conducted on such merged DEMs inevitably
results in fickle results, be it in view-shed computa-
tion, overland water flow, least cost path, etc.
The MBlend method (Leit
˜
ao et al., 2016) pro-
poses to merge two overlapping DEMs by retaining
the highest spatial resolution DEM and introducing
a smooth transition into the lower resolution DEM.
Modifications are applied only to the lower resolu-
tion DEM, producing a single DEM that covers the
entire study area with the highest possible accuracy,
while also ensuring smooth transitions between the
original DEMs. r.mblend is an implementation of
the MBlend method, coded in the Python language as
an add-on to the Geographic Resources Analysis Sup-
port System (GRASS). It introduces an advanced and
flexible computation of the transition between DEMs,
that the user may tune through various parameters.
This article compares results obtained using
r.mblend with those of two conventional DEM mer-
ging methods on two different test cases. Section 2
describes the methods used, Section 4 presents the
test cases used for comparison and Section 6 rounds
up the results.
2 RASTER MERGING
2.1 Conventional Methods
Common GIS programmes provide simple functi-
ons to merge raster data sets. They usually re-
quire the inputs to have the same cell size and be in
42
de Sousa, L. and Leitão, J.
Improvements to DEM Merging with r.mblend.
DOI: 10.5220/0006672500420049
In Proceedings of the 4th International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM 2018), pages 42-49
ISBN: 978-989-758-294-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

the same coordinate system. These simple methods
can be classified in two different types: Cover and
Average (Eastman, 2012).
Cover type methods do not operate any adjust-
ments to the input DEMs, they are simply superim-
posed. The DEM resulting from this method assumes
cell values of the first input across its entire extent and
values from the second input in areas not covered by
the first. The resulting DEM can yield significant ele-
vation discontinuities along the boundary between the
input DEMs, resulting in erroneous slope and aspect
values (Hickey, 2000).
Average methods assign to the merged DEM the
average elevation within areas where the input DEMs
overlap. Outside the overlapping area the resulting
DEM assumes the value of the existing input; only va-
lues within the overlapping area are changed. Some
of these methods try to tackle the discontinuities is-
sue using a weighted average, as is the case with
IDRISI (Eastman, 2012). A subset of these, usually
referred as Blend methods, go further, using a avera-
ging weighting function that may be linear, smoothed
(e.g. bicubic), or discontinuous; this way more weight
can be given to one of the inputs in certain areas, e.g.
closer to borders. It must be noted though, that these
averaging methods act as low pass filters, therefore
reducing the accuracy of the resulting DEM.
2.2 MBlend
The MBlend method differs from conventional met-
hods in two essential aspects: it is aware of the dif-
ferent spatial resolution of its inputs and modifies
areas for which only low resolution data are availa-
ble (Leit
˜
ao et al., 2016). This method works by identi-
fying two edges: the border between the low and high
resolution inputs (near edge) and the border around
the area of the low resolution input not overlapping
with the high resolution input (far edge). Points are
set along each of these two edges, those on the near
edge take the difference between the two inputs at the
location; those on the far edge take the value zero (see
Figure 1). From these points is computed a transition
surface, spatially restricted to the area of the low re-
solution input, not overlapping with the high resolu-
tion input. Finally, the transition surface is subtracted
from the low resolution input; the resulting DEM as-
sumes the values of the high resolution input within
its extent and outside the values of the low resolution
input minus the transition surface.
The MBlend method consist in seven essential
steps:
1. Obtain the low resolution extent - this is the ex-
tent of the study area that is only covered by the
low resolution DEM. It can be obtained by vecto-
rising the extent of each DEM and then applying
an intersection.
2. Compute differences - obtained by subtracting the
low resolution from the high resolution DEM.
3. Obtain the near edge - the differences map is vec-
torised into points. A buffer around the low re-
solution extent is then used to select from these
difference points those that lay along the border
between the two rasters (see Figure 1 (a)).
4. Obtain the far edge - the low resolution DEM is
vectorised to points and those along the border are
selected using an internal buffer to the low resolu-
tion extent.
5. Build interpolation points set - the value zero is
assigned to the points in the far edge; it is then
merged with the near edge into a single data set.
6. Interpolate smoothing surface - a new raster sur-
face is created by interpolation using the edges
points data set. The resulting surface smoothly
transitions from the full difference between the
two input DEMs along the near edge towards zero
along the far edge (see Figure 1 (b)).
7. Apply smoothing - the smoothing surface is added
to the low resolution raster. The result is then pa-
tched with the high resolution raster to obtain a
single data set covering the entire study area.
3 Implementation
3.1 The GRASS Add-on Development
Environment
GRASS is a Geographical Information System (GIS)
originally developed by the US Army Corps of En-
gineers with a focus on spatial data management and
analysis (Neteler et al., 2012). It is characterised by a
deep dataset management and archiving structure and
a vast roll of analysis operations, also known as mo-
dules. GRASS manages multiple data-set types: ras-
ter, vector, imagery and voxel (3D).
GRASS was originally written in C, with its mo-
dern structure now also coded in C++. Since 2012, in
the wake of version 6.4.2
1
, an API to the GRASS C
library was made avaialble for the Python program-
ming language (Sanner et al., 1999). This API greatly
simplified the development of new GRASS modules,
1
https://grass.osgeo.org/announces/announce grass642
.html
Improvements to DEM Merging with r.mblend
43

also facilitating the integration of popular Python li-
braries such as NumPy
2
or Pandas
3
.
A system to host new modules – called “add-
ons” – was also created, whereby third party develo-
pers commit their code to the GRASS repository, thus
making their module(s) automatically available to all
GRASS users. These “add-ons” can be added to every
GRASS installation with the module g.extension.
This module connects automatically to the GRASS
repository, downloads and installs the required bina-
ries or code.
Developed within this environment, r.mblend is
versioned and managed at GitHub
4
, and released un-
der the European Union Public Licence
5
.
3.2 Improvements Over the Original
MBlend Method
The main difference from the r.mblend implementa-
tion to the original method concerns the computation
of the far edge. r.mblend uses by default only those
points in the far edge that are farther away from the
near edge, with the aim of obtaining a geometrically
even transition in the smoothing surface. In detail,
this computation is performed by r.mblend as fol-
lows:
1. Compute a distance map within the low resolution
area relative to the high resolution raster.
2. Vectorise the distance raster into a points data set.
3. Normalise the distance values and select those
above a certain threshold (by default 95% of the
maximum distance).
4. Use an inner buffer to the interpolation area to se-
lect further those points only along the low reso-
lution raster border.
Figure 1 presents these differences to the original
proposal with a simple case. The user is able to adjust
the distance cut off thus dosing the weight of the far
edge on the smoothing surface interpolation.
The r.mblend implementation also provides the
user with the option to use the average difference be-
tween the two input DEMs as the value assigned to
the far edge interpolation points (instead only zero,
as in the original proposal). In this mode the resulting
DEM remains closer to the high resolution input. This
may be useful when the differences between the two
DEMs are spatially uncorrelated.
2
http://www.numpy.org/
3
http://pandas.pydata.org/
4
https://github.com/ldesousa/r.mblend
5
http://ec.europa.eu/idabc/eupl.html
(a) Edges in original method (b) Smooth surface
(c) Edges with 95% distance cut off (d) Smooth surface
Figure 1: Interpolation points edges with original method
(a) and a 95% cut off to the maximum distance (c) and
the respective smoothing surfaces (b and d). Near edge in
green, far edge in yellow.
3.3 Model Parameters
The r.mblend module takes the following arguments:
• high - name of the high resolution DEM;
• low - name of the low resolution DEM (overlap-
ped by the high resolution input);
• output - name of the resulting blended DEM;
• far edge - percentage of the maximum distance
to the high resolution DEM used to determine the
far edge;
• inter points - number of points (from both ed-
ges) to use in interpolation;
• -a - optional flag that indicates to assign the
average difference between the two input rasters
to the far edge (instead of zero).
GISTAM 2018 - 4th International Conference on Geographical Information Systems Theory, Applications and Management
44
The far edge argument is bounded between 0
and 100; by default is used a value of 95. Values clo-
ser to zero translate into a higher number of points in
the far edge, impacting the shape of the differences
raster.
The Inverse Distance Weighting (IDW) method is
used to interpolate the smoothing surface. This met-
hod takes as a parameter the number of points (from
the two edges) used to interpolate each new cell va-
lue. By default 50 points are used; inter points
provides the user a mean to tweak this value. The
higher the number of points used the smoother is the
resulting smoothing surface; however, it also means a
lengthier computation time.
4 TEST CASES
4.1 A - Lucern
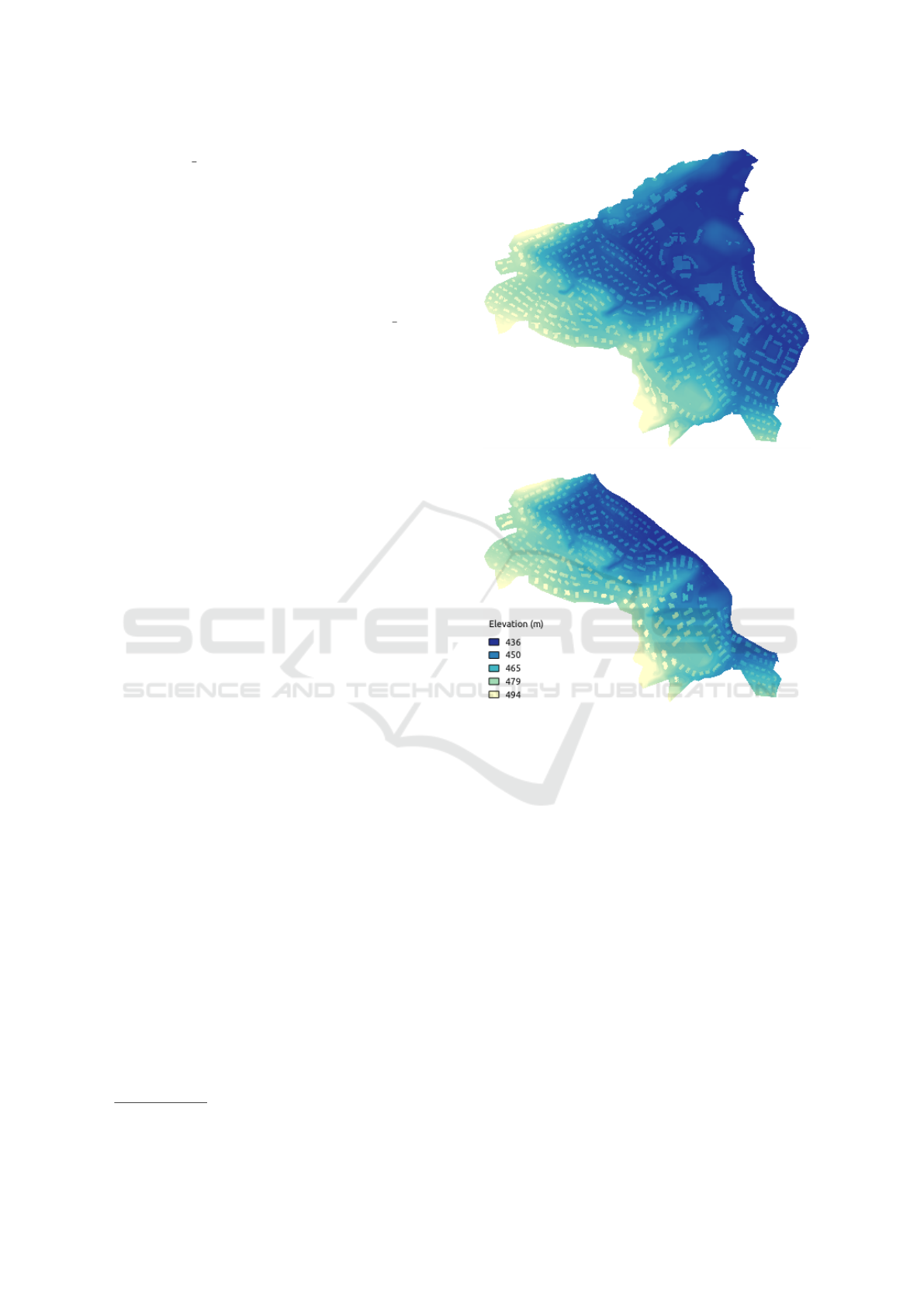
For the first test were employed two DEMs represen-
ting an urban catchment in the city of Lucerne in Swit-
zerland. This is a relatively smooth surface, but in-
cluding a number of detailed man-made features. The
lower resolution DEM was obtained with an air-borne
LiDAR sensor and provided to this study by the offi-
cial cadastral service of the Canton of Lucerne. It has
a cell side of 0.5 metres and a vertical accuracy of ap-
proximately 0.5 metres (Figure 2a). This dataset was
last updated in July of 2012 (Doe, 2014).
The high resolution DEM was obtained with a
conventional camera mounted aboard an electricity
powered, fixed-wing UAV. This UAV made several
flights at an altitude of 114 metres over the study area
in March of 2014. Overlapping images where acqui-
red from different angles allowing for stereoscopic
depth rendition. The resulting DEM has a spatial re-
solution of 0.5 metres and a vertical accuracy of 0.2
metres (Figure 2b).
4.2 B - North Carolina
The second test case was derived from the open spa-
tial data set from North Carolina distributed with
GRASS as sample data
6
. This data set includes a
10 metres cell side DEM representing relatively rug-
ged terrain with carved valleys and sparse man-made
features. A section of this DEM was cropped to be
used as high resolution input (Figure 3b). The origi-
nal DEM was then converted to a lower spatial resolu-
tion with 60 metres side cells, to which non spatially
correlated noise was added (Figure 3a).
6
https://grass.osgeo.org/download/sample-data/
(a) LiDAR
(b) UAV stereoscopic
Figure 2: Overlapping DEMs of different resolutions built
from the North Carolina data set.
5 RESULTS
To compare r.mblend with the Cover and Average
methods the Mosaic tool provided with the ArcGIS
software was used. This is tool is able to merge DEMs
using both types of conventional methods. All results
where then assessed with GRASS.
A high pass filter was used for a first assessment
of the merged DEMs produced by each of the three
methods. A 5-by-5 cell filter was used in order to
highlight zones of transition, e.g. sharp edges, walls
and so forth. Figure 4 presents a detail of these re-
sults for the Lucerne test case. Immediately standing
out is the artificial step introduced by the Cover and
Average methods along the border between the two
input DEMs. The step is not so marked with Average,
but still present; contrariwise, at a closer inspection a
loss of detail is visible with this method, with various
Improvements to DEM Merging with r.mblend
45

(a) Low resolution
(b) High resolution
Figure 3: Overlapping DEMs of different resolutions built
from the North Carolina data set.
small transitions in the UAV DEM loosing magnitude.
As for r.mblend it shows no border at all, while pre-
serving the fine detail in the high resolution DEM.
In the North Carolina test case the artificial step
introduced by the Cover and Average methods is also
present, even if less marked (Figure 5). In this case
the transitions within the larger cell areas stand out
considerably more. Since this is rugged terrain, the 60
metres cells introduce relevant ridges and cliffs. It is
also interesting to observe the effects of the Average
method on the high resolution area, introducing the
artificial ridges from the 60 meters DEM.
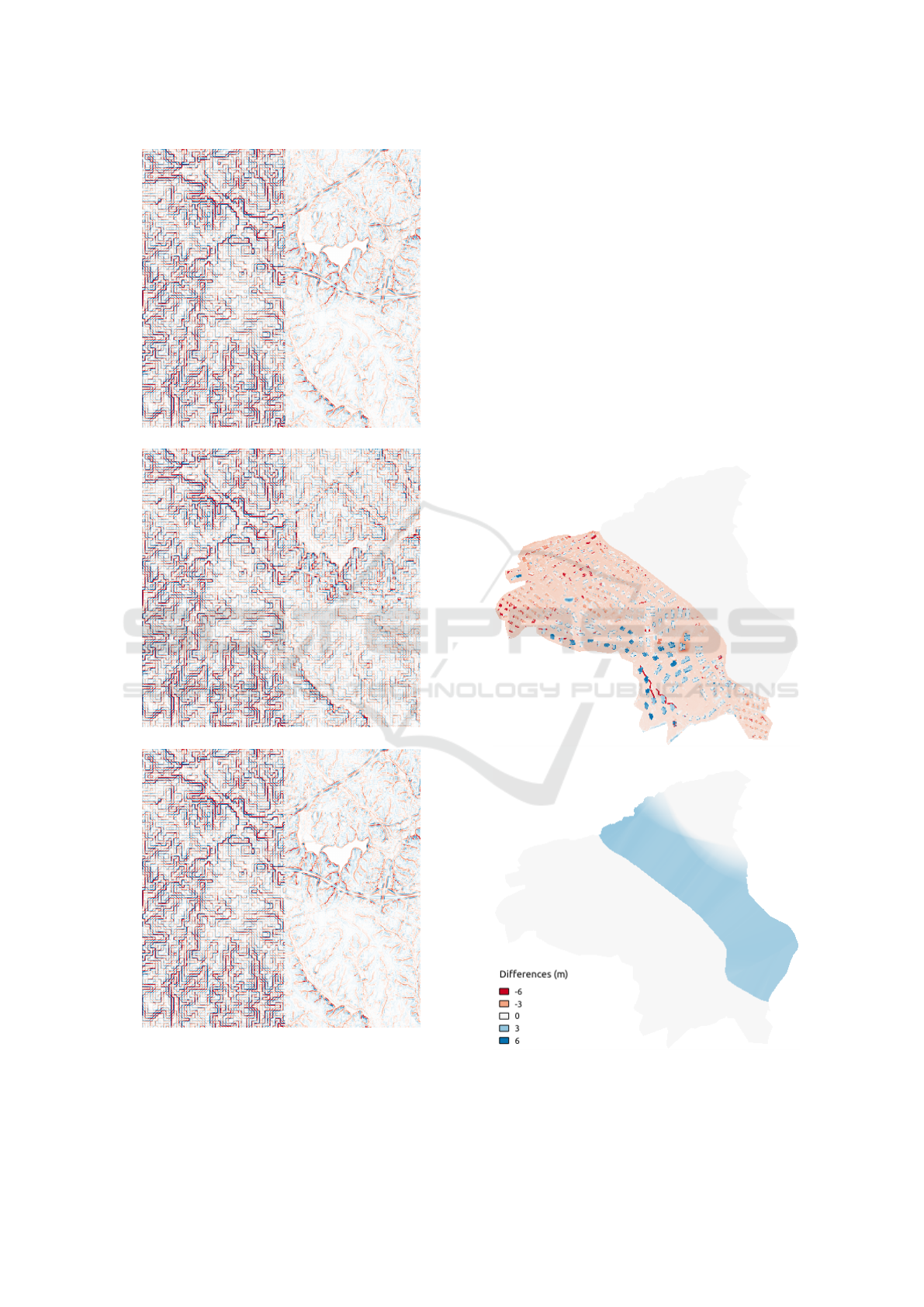
Taking the differences from the original to the out-
put DEMs provides another point of assessment. Fi-
gure 6 shows together the differences from the blen-
ded result to the high resolution DEM and the dif-
(a) Cover method
(b) Average method
(c) r.mblend
Figure 4: Results of high pass filter applied on merged
DEMs in test case A.
GISTAM 2018 - 4th International Conference on Geographical Information Systems Theory, Applications and Management
46
(a) Cover method
(b) Average method
(c) r.mblend
Figure 5: Results of a high pass filter applied on merged
rasters in test case B.
ferences from the result to the low resolution DEM
in the areas not covered by the high resolution input.
This analysis is not presented for the Cover method
since it does not change the inputs. The differen-
ces between Average and r.mblend are striking, ap-
pearing in opposite areas. r.mblend applies changes
only to the low resolution DEM, with a smooth tran-
sition surface; Average leaves the low resolution data
untouched, while applying irregular and many times
severe changes to the high resolution data.
A similar pattern in differences is patent in the
North Carolina test (Figure 7). r.mblend yields again
the smooth transition surface, applying changes solely
to the low resolution input. As before, the Average
method introduces broad changes to the area where
both inputs overlap, in this case coinciding with the
full extent of the high resolution DEM.
(a) Average method
(b) r.mblend
Figure 6: Differences from resulting blended DEM to inputs
in test case A.
Improvements to DEM Merging with r.mblend
47

(a) Average method
(b) r.mblend
Figure 7: Differences from resulting blended DEM to inputs
in test case B.
6 SUMMARY AND FUTURE
WORK
This article compared the r.mblend GRASS add-
on with conventional methods to merge overlapping
DEMs of different spatial resolution. Using two dif-
ferent test cases, it was possible to assess its advan-
tages on smooth and rugged terrain. r.mblend eli-
minates the steps introduced along the border of the
areas where the merging inputs overlap; these steps
are not so marked in rugged but still present. This
smooth transition is not achieved at the expense of
loss of detail, as the high resolution DEM is left un-
touched. This contrasts particularly with the Average
method, that visibly derides the information from the
high resolution input. r.mblend presents itself as cle-
arly superior alternative to the conventional methods
assessed.
Presently, r.mblend operates on a single execu-
tion thread. All operations conducted are relatively
straightforward, except for the interpolation of the
smoothing surface. For the Lucern case study pre-
sented above, this operation may take in the order
of dozens of minutes. However, it is possible to pa-
rallelise this operation, since there is no dependence
between cells of the resulting surface. The GRASS
Python API provides elementary tools for parallelisa-
tion, spawning GRASS commands as sub-processes.
Therefore, an obvious evolution to r.mblend is to
slice the interpolation area and run the interpolation
independently on each slice.
Other ways of improvement also concern the
smoothing surface interpolation. Alternative methods
beyond IDW can be made available to the user, as so
their respective parameters. This would provide the
user with further degrees of freedom to tune the mo-
dule output.
Finally, r.mblend can also be extended to auto-
matically apply an high pass filter on the resulting
DEM, providing it as a secondary output. This is a
useful asset to assess to quality of the resulting DEM,
either visually or in more elaborate analysis.
REFERENCES
de Smith, M. J., Goodchild, M. F., and Longley, P. A.
(2015). Geospatial Analysis: A Comprehensive Guide
to Principles, Techniques and Software Tools - Fifth
Edition, chapter Geocomputational methods and mo-
deling, pages 625–672. Winchelsea Press.
Doe, R. (2014). GIS Kanton Luzern. https://rawi.lu.
ch/themen/gis_kanton_luzern. Accessed: 30-10-
2014.
Eastman, J. (2012). IDRISI Selva. Clark University, MA,
USA.
Hickey, R. (2000). Slope angle and slope length solutions
for GIS. Cartography, 29(1):1–8.
Katzil, Y. and Doytsher, Y. (2005). Spatial rubber sheeting
of dtms. In Proceedings of the 6th Geomatic Week
Conference, Barcelona, Spain, volume 811.
K
¨
ung, O., Strecha, C., Beyeler, A., Zufferey, J.-C., Flore-
ano, D., Fua, P., and Gervaix, F. (2011). The accuracy
of automatic photogrammetric techniques on ultra-
light uav imagery. In UAV-g 2011-Unmanned Aerial
Vehicle in Geomatics, number EPFL-CONF-168806.
Leit
˜
ao, J., Prodanovi
´
c, D., and Maksimovi
´
c,
ˇ
C. (2016). Im-
proving merge methods for grid-based digital eleva-
tion models. Computers & Geosciences, 88:115 –
131.
Luedeling, E., Siebert, S., and Buerkert, A. (2007). Filling
the voids in the srtm elevation modela tin-based delta
GISTAM 2018 - 4th International Conference on Geographical Information Systems Theory, Applications and Management
48

surface approach. ISPRS Journal of Photogrammetry
and Remote Sensing, 62(4):283–294.
Neteler, M., Bowman, M. H., Landa, M., and Metz, M.
(2012). Grass gis: A multi-purpose open source gis.
Environmental Modelling & Software, 31:124–130.
Sanner, M. F. et al. (1999). Python: a programming lan-
guage for software integration and development. J
Mol Graph Model, 17(1):57–61.
Improvements to DEM Merging with r.mblend
49
