
The ACCEPTABILITY of Caregiver Robots in Elderly People
Melissa Ferretti, Giovanna Morgavi and Gianmarco Veruggio
IEIIT (Istituto di Elettronica e Ingegneria dell’Informazione e delle Telecomunicazioni), Torino, Italy
CNR (Consiglio Nazionale delle Ricerche), Via De Marini 6,16149 Genoa, Italy
Keywords: Caregiver Robots, Robots for Elderly People, Robot Acceptability.
Abstract: During the last few years, due to the aging of the population, many scientists have developed ICT tools to
offer elderly people an independent life at home as long as possible. Most of these researchers focused their
efforts on problem solving without adequate care to the agreeability and/or the acceptability of these ICT
objects for their users. These resulting artifacts will hardly be used in real life by the users for which they
have been developed. In this paper, we will present an experiment done on 202 over 65 elderly people on
the acceptability and the likeness features a caregiver robot must have. From the classification and analysis
of the emotions elicited by the physical/appearance characteristics of 25 different real robot pictures we
found some interesting results for appealing or unpleasant features for caregiver robot design.
1 INTRODUCTION
Populations around the world are rapidly aging.
According to an estimation by the OECD by the
middle of the 21st century the number of older
people will exceed 2 billion (around 21% of the
world's population), and this trend will affect and
cover not only industrialized nations but also
developing nations (OECD, 2015).
To cope with this growing aging population,
societies will need to adapt to this changing
demographic and invest in healthy aging, enabling
individuals to live both longer and healthier lives.
Finding a way to create and strengthen
conditions for an "active aging", which also aims to
maintain the independence at home of the elderly
population, can be a serious challenge but also a
great opportunity.
Technology, and particularly AI, could be part of
the solution to this problem, offering support for
older adults with the difficulties and challenges
associated with aging (Pollack, 2005). Specifically
robots could have great potential for providing
assistance to older adults in their own homes and so
the question about robot acceptance is particularly
relevant for proper artifact design.
Various researches focused on the study of the
functions that a caregiver robot should perform.
Numerous attempts to create robotic tools, both in
development and commercialization, have been
create to carry out specific tasks to help the elderly
live at home for longer by performing activities such
as medication management, house keeping, social
entertainemen and providing emergency monitoring.
However, as shown in literature, technology
applications developed for senior users are often
discarded due to factors that are specific to this age
group of people. Acceptance of a robotic caregiver is
a complex and multifaceted issue. Studies conducted
on elderly people is usage of ICT tools showed how
the reluctance to adopt new technological
instruments is not only due to a lack of skills but,
also, to the lack of perception of advantages and
benefits of using these tools. To ensure acceptance
of these new technological tools the age-related
changes in perceptual, motor and cognitive abilities
must be considered. Combined with these really key
aspects, it is necessary to recognize the importance
of the compensatory process that older people
develop to adapt to their changes and to understand
the crucial role played by motivation, affection, and
experience in every social interaction. In this
context, if we want to increase the likelihood that
people will utilize robot assistance, acceptance is a
key factor. Indeed, if the development of these
robots designed to solve pretended problems, does
not lead to agreeable and/or acceptable objects to the
elderly, they will hardly be used.
Ferretti, M., Morgavi, G. and Veruggio, G.
The ACCEPTABILITY of Caregiver Robots in Elderly People.
DOI: 10.5220/0006674301110118
In Proceedings of the 4th International Conference on Information and Communication Technologies for Ageing Well and e-Health (ICT4AWE 2018), pages 111-118
ISBN: 978-989-758-299-8
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
111

As a result, we decided to focalize our attention
on older adults’ attitudes and preferences for robots,
focusing on the aspects that are not functional but
kinesthetic, because the acceptability of these tools,
for this age group, depends heavily on empathetic
factors. Keeping this in mind, we could be able to
design robot capable to serve the needs of the
elderly.
2 CAREGIVER ROBOT
This paper is part of the extensive research
landscape that is being carried out today in the field
of social robotics. Researches in eldercare proposed
robots to be a form of assistive technology with a
great potential to support older adults, to maintain
their independence, and to enhance their well-being
(Ezer, et al., 2009).
In literature, assistive robots are classified in two
groups according to the function for which they
were developed: rehabilitation robots and social
robots (Broekens, et al., 2009).
Social robots, used in eldercare studies, can then
be divided into two other categories: service type
robots, developed to be used as assistive devices,
and companion type robots, developed to enhance
health and psychological wellbeing.
The research in this field is rich and fervid and
the technology development in the homecare robotic
field is developing faster and faster. Probably in the
near future, robot caregivers will become feasible
and affordable, but, currently, this technology
development is mostly technology driven. The
question if the elderly would accept a robotic
assistant at home has still to be more deeply
investigated.
In literature, most of the studies measured the
acceptance of specific robots with limited
functionality (Smarr, et al., 2013). Some papers
cover the definition of the tasks that elderly could
delegate to robot assistant. In (Ziefle and Calero,
2017) for example, particular situations where
elderly people can accept that some tasks are
performed by a robot on behalf of humans are
discussed. But this gives little information about
general attitudes and perceptions of the elderly about
robots because it is too related to the contingency of
the performing task.
Other studies investigated the relationship
between appearance and functionalities, stated that
appearence influences the assumptions that people
make of a robot and of the tasks correlated to it
(Goetz, et al., 2003). In this meaning, appearance
must support the real expectations of the robot's
skills. The more the user gets a clear idea of what
the machine can do, the less he will be disappointed
when using it (Kaplan, 2005). Within this vision,
functionalities of the robot loose weight and the
appearance should be designed just to help users
build a mental model of the robot usage (Lohse, et
al., 2008).
On the other hand, researches also emphasized
how the technologies for assistance, designed to
facilitate autonomy, are often perceived as a
handicap or aging signal and this realization can lead
to their rejection. Therefore the design of assistive
ICT tools should be universal. It should aim at de-
stigmatizing assistive robots making them appealing
and useful for everyone and not just for the elderly
or disabled (Wu , et al., 2014).
Finally, as highlighted by Van der Heijden, in
‘hedonic systems’, the concept of enjoyment is
crucial for the intention to use a techological tool
(Van der Heijden, 2004). Obviously, in eldercare,
we can’t say that a robot is developed just for
entertaining, but enjoyment needs to be part of the
acceptance model for robotic technology.
Our research moves right from this assumption
and seeks to understand in advance what the
physical characteristics are that affect acceptability
and enjoyability, making them the basis for future
developments and functional studies.
3 RESEARCH QUESTION AND
PURPOSE OF THE STUDY
This paper examines the physical features that make
a caregiver robot fit and usable in order to
understand the peculiarities such device should have
to be really used by the elderly at home. The
caregiver robot should increase independent living
and social participation of older people in relatively
good health, comfort and safety.
In our experiment, we investigate what
appearance a robot shoud have. Our analysis
reflects on physical aspects of the robot rather than
on functional aspects. We designed an experiment
to try to identify empathetic features that, in some
way, facilitate the acceptance and desirability of the
robot by the elderly.
This experiment was conducted on 202 italian
people aged over 65.
Table 1 shows the robots we selected to be
evaluated within this experiment. These robots have
been chosen among various artifacts developed in
ICT4AWE 2018 - 4th International Conference on Information and Communication Technologies for Ageing Well and e-Health
112

the world research scene. We did not limit our
choice among social assistive robots, but we also
took into account machines belonging to different
fields of application like Kismet or ICube.
We created twenty five cards, one for each
selected robot, to highlight the physical and
functional characteristics and robot dimensions.
Each card contains two or more color images of
one robot with elements (people or objects of known
size) that allowed the observer to informally infer on
dimensions and functions of the robot.
Figure 1: Experiment card example. As you can see,
picture 1 displays the Nao robot dimension and its
possible social interactions. Picture 2 displays the
entertainment activity of Nao robot.
For our experiment we chose to use a robot
classification that can be partially riconduced to the
Brokens et al. paper (Broekens, et al., 2009). The
pool of tested robots was composed as shown in
Table 1.
The first group is composed of
medical/rehabilitation robots. In this category, the
enphasis is focused on the physical assistive
technology and function (i.e. Riba II, a robot
developed to perform patient-transfer tasks
(Toshiharu, et al., 2010)).
The second group is representative of the social
robots, systems that can be perceived as social
entities with communication capacities. In this case,
as stated in literature, we complied with the
distinction between service robots and social robots.
Service type robots typically investigate which
social features can lead to the acceptance of a
robotic device at home and how these same social
features can facilitate the actual use of the device.
Examples of these researches are the German Care-
o-bot, a robotic assistant that supports people in their
daily living at home performing common tasks like
offering drinks, setting the table, switching on the
TV or the radio and even calling for rescue service
in case of emergency (Graf, et al., 2004), or
Giraffplus, a robot developed to check elderly
health, ready to rescue in case of emergency and
able to put users’video calls through to their
relatives and physicians (Coradeschi, et al., 2014).
Companion type robots focus on pet-like
companionship, like the Japanese seal-shaped robot,
Paro, (Wada, et al., 2003 and Shibata and Wada,
2011), the Sony small robot dog, Aibo, or the
robotic Japanese cat, Yume Neko Venus.
Table 1: List of the 25 robots evaluated within the
experiment.
Medical/rehabilitation
robots
iRobi Q
Riba II
Medical robot
Social robots
Companion
type
Aibo
Yume Neko
Venus
NAO
Paro
Service
type
Roomba
Ca
r
-O-Bot
Giraff
p
lus
Asimo
Pe
pp
e
r
Electronic
Sourveillance
Turtle Bot
Romeo
Chess
Terminato
r
Ramci
p
PR2
General purpose
robots
CB2
ICube
Kismet
Mathilda
Albert Hubo
Wall-E
Kobian
Finally, we added the general purpose robots group
where we put robots that are not classifiable within
the two previous groups. They don’t have a specific
The ACCEPTABILITY of Caregiver Robots in Elderly People
113
function clearly understandable by looking at the
pictures.
3.1 Method
3.1.1 The Sample
This experiment was conducted on 202 italian
people aged over 65, participation was voluntary and
anonimity was guaranteed. Each participant signed a
disclaimer sheet for privacy. Data was collected
through personal interviews conducted by graduates
in psychology. The duration of each experiment
session was approximately 1 hour.
The experiment started by collecting information
about participants’ demographics (age, gender,
profession and education).
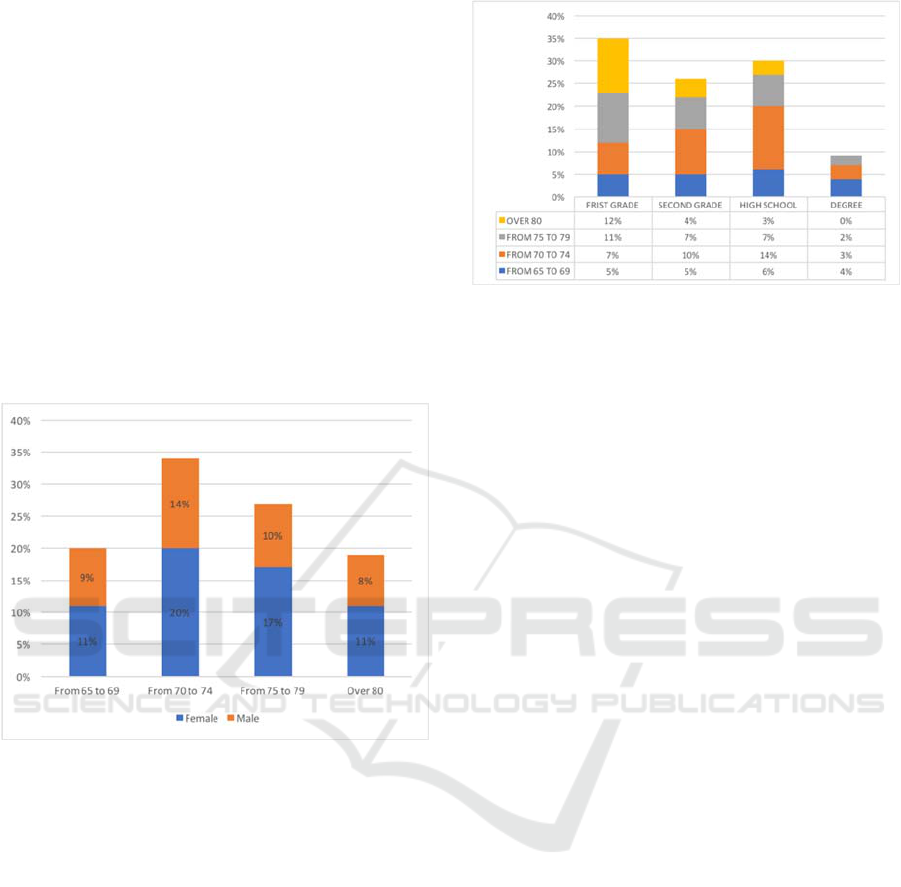
Figure 2: Sample distribution age by gender.
The response sample was composed of elderly
Italian adults living independently (N = 202), aged
65 to 87 (M = 74 years; SD =5,5 years). 59% of the
sample was composed by female and 41% by male.
Participants varied in their educational
background, with 39% having college or university
education and with 61% having less than a formal
college education (35% having only a first grade
education).
3.1.2 The Experiment Process
Each participant was asked to judge the acceptability
of the robot based on the feeling elicited by the
observation of each card containing the picture of
the robot and to put the cards in order by preference:
first the preferred one and last the less liked.
The conductor of the experiment, to facilitate the
carrying out of this task, presented the participant
Figure 3: Participant education distribution.
with cards in pairs. Then, he/she asked the question:
‘Which robot among these two would you prefer to
have at home?’. Among these two cards, the
participant had to choose which one he liked more.
Iterating this process, all the 25 cards were sorted in
order of preference.
No verbal information on the role and/or
function of the robot was given to the participants.
Conductors were instructed, if questioned about the
robot, not to give direct answers, but to stimulate
reflection by letting the participants think what
he/she might infer from the images.
4 RESULTS
A preliminary analysis was performed in order to
evaluate only cards classified in the first or in the
last position. Figure 4 shows the number of times
each robot obtained the first position.
In the right space of figure 5, the five robots that
got the highest number of first places are shown:
they are Aibo (12%), the little Sony robot dog,
Yume Neko Venus (11%), the Japanese robotic cat,
ICube (9%), the baby-like robot developed by IIT,
Paro (8%), the small Japanese seal-shaped robot and
Giraffplus (7%) the social communication robot.
The experiment results showed a strong
preference (about 40% of the sample) for robots
similar to small animals or babies.
By analyzing the distribution of the score of
robots with the last ratings, we can observe that the
worst classified robot is CB2, the baby-like robot
(17% of the participants placed it in the last
position). CB2 and ICube are both baby robots: what
is the difference between them that makes such a big
difference in the preferences? CB2 is bigger then a
human being, ICube is smaller. CB2 has a more
ICT4AWE 2018 - 4th International Conference on Information and Communication Technologies for Ageing Well and e-Health
114
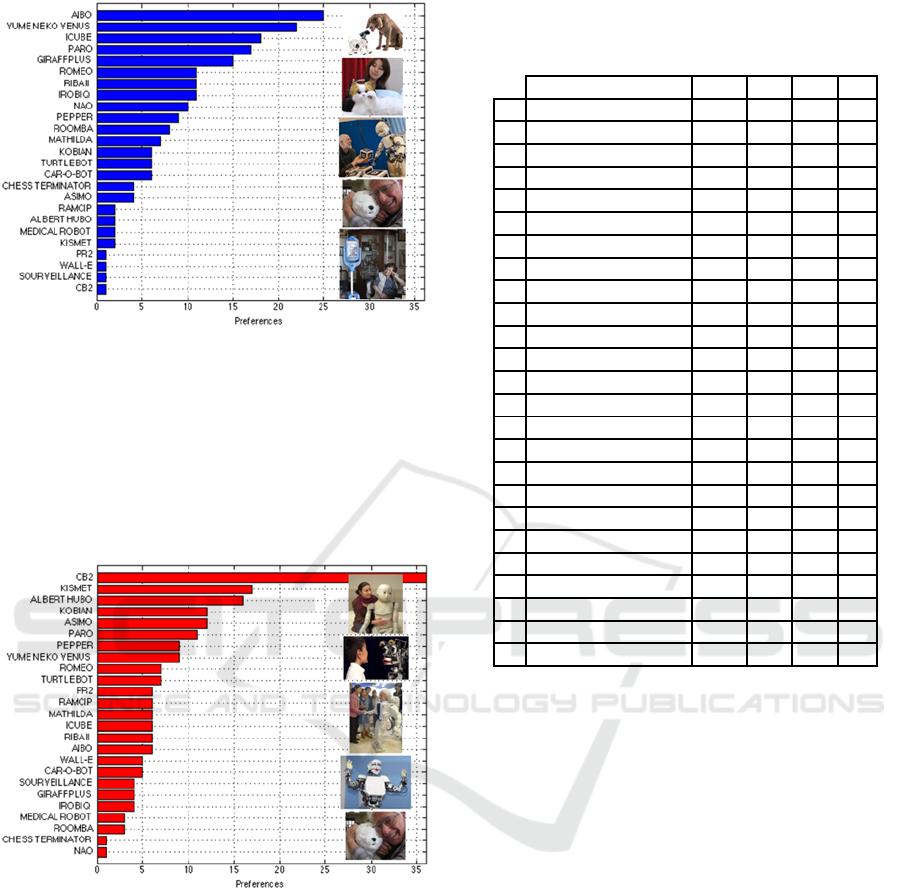
Figure 4: Distribution of number of the first position
scores for each robot. On the right side of the picture, an
image of the 5 first classified robots is shown.
detailed face than iCube, in this case confirming the
Uncanney Valley theory (Mori, 1970). And last , but
not least, in recent times, ICube robots have been
presented many Italian TV shows and
advertisements and maybe its look became familiar.
Figure 5: Distribution of number of the last position scores
for each robot. On the right side of the picture, an image of
the 5 worst classified robots is shown.
It is interesting to underline that the social robots
Kismet, Albert Hubo, Kobian and Asimo together
account for 46% of the last position. What do they
have in common? All of them show a human-like
appearance and all of them have dimensions that are
greater or equal to human dimensions.
This analysis, however, gives us only a partial
picture of the results of the experiment and
therefore, in order to be able to take into account the
intermediate positions, we made an overall analysis
of the order of classification of the cards by
Table 2: Mean (M), Standard deviation (SD), Median
(Me) and Mode (Mo) of the robot scores, ordered by
Median.
Robot M SD Me Mo
1 GiraffPlus 9,59 7,04 8 2
2 Aibo 9,93 6,7 9 1
3 Roomba 10,98 6,55 10 4
4 NAO 10,48 6,32 10 5
5 Paro 10,94 7,87 10 2
6 Asimo 11,79 7,01 10,5 6
7 Yume Neko Venus 11,25 7,96 10,5 1
8 Romeo 11,68 6,92 11 13
9 I Robi Q 11,79 7,02 12 2
10 Turtlebot 13,02 6,36 12 7
11 Ca
r
-O-Bot 12,83 6,94 13 18
12 Riba II 12,48 7,83 13 2
13 ICube 12,19 7,4 13 1
14 Wall-E 13,38 6,53 13,5 4
15 Pe
pp
e
r
13,43 7,03 14 22
16 Medical 13,66 6,71 14 21
17 Chess Terminato
r
13,29 6,36 14 14
18 PR2 14,82 5,98 14 12
19 Ramcip 14,43 6,07 14,5 11
20 CB2 16 7,34 16 25
21 Kismet 15,35 7,29 16 21
22 Mathilda 13,96 7,91 16 23
23 Sourveillance 15,24 6,53 17 22
24 Kobian 16,2 6,78 17,5 15
25 Albert Hubo 16,3 7,21 18,5 24
extrapolating average, median and mode from the
data sample. As seen in Table 2, the arrival order
varies according to the statistical value considered.
If we take the median as a significant value in the
first five positions, we find Giraffplus, Aibo,
Roomba, Paro and Nao. Among them, there are
Paro, Aibo and GiraffPlus, which also appeared
among the top 5 of figure 4.
By considering the median, more than 50% of
the sample liked Giraffplus and put the robot within
the top 8 positions.
Even if Giraffplus is taller than human beings, it
is probably non considered dangerous since it is very
thin and its functions (allowing video
communication with other people), coupled with a
non similarity to human being, contribute to rating it
in a good position for a wide number of people.
Second, we find Aibo. For 50% of the
participants, Aibo is rated between the first and the
ninth position. In third place we find Nao, Paro and
Roomba (the cleaning robot). For more than 50% of
the sample, their rating is located within the top 10
rates.
The ACCEPTABILITY of Caregiver Robots in Elderly People
115
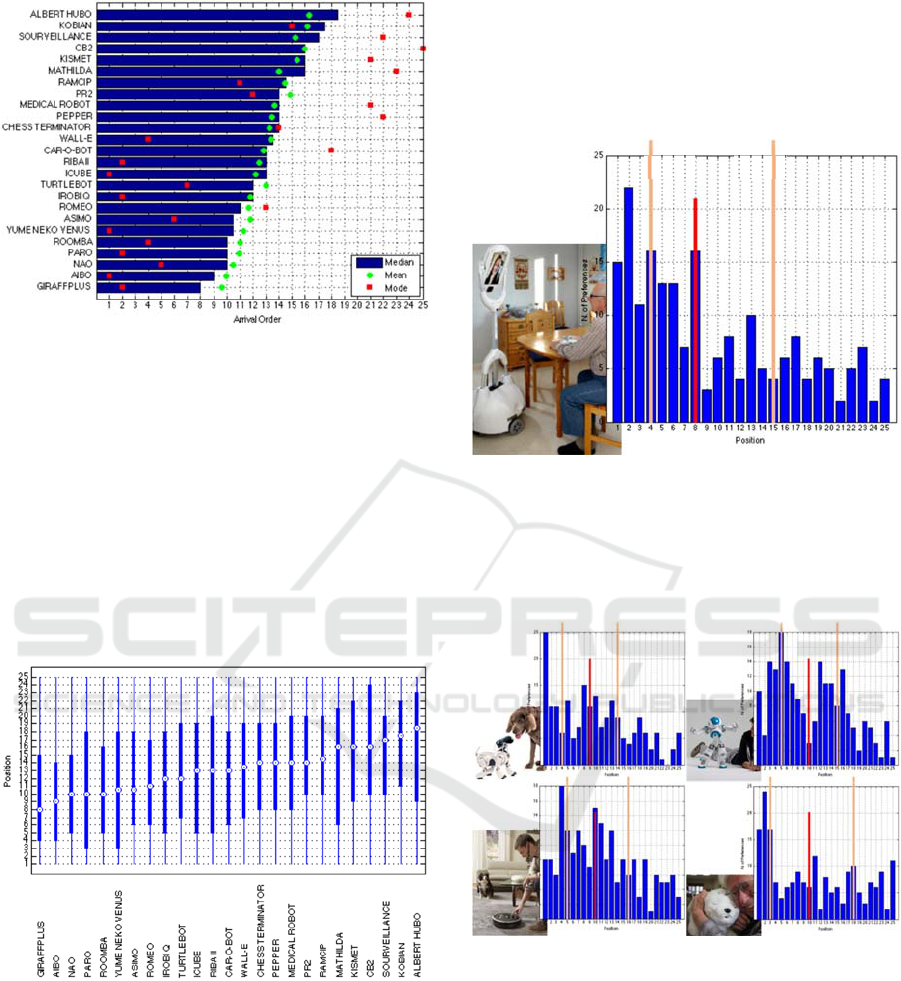
Figure 6: Distribution of Mean, Median and Mode ordered
by Median-Mean of robot rating.
To measure the statistical dispersion, we divided the
data set into quartile and we computed the
interquartile range
(IQR) that is equal to the
difference between third and first
quartiles. Quartiles
divide a rank-ordered data set into four equal parts.
The values that separate parts are called the first,
second, and third quartiles; and they are denoted by
Q1, Q2, and Q3, respectively.
For each robot card, figure 7 shows the median
of the position value with IQR didtribution.
Figure 7: IQR distribution for median of the position
values of the card position for each robot.
The interquartile gap indicates a measure of how
many values deviate from the sample median.
If we consider the variability of the first 5
robots with lower median ( i.e. the 5 best classified
robots by using the median of the position rate as
evaluation parameter) we can observe that while
Giraffplus, Aibo, Nao and Roomba show a
comparable variability, Paro show a larger
variability in the position.
Giraffplus, which is the best classified in this
case, shows IQR valus larger then Aibo, Nao and
not perfectly centered.
Figure 8: Giraffplus position rate distribution. Q
1
and Q
3
are the first and the third Quartile respectively and M
e
is
the median value.
Indeed, the 50% of rates falls between Q
1
and Q
3
but
it is shifted to Q
3
.
Figure 9: Position rate distribution of Aibo, Nao, Roomba
and Paro.
Figure 9 shows the position rate distribution of Aibo,
NAO , Roomba and Paro. The high IQR of Paro
indicates that this robot shows some characteristics
that are considered positive for some and for others
are neutral or negative. Paro is a social robot that
‘asks for caregiving’ and its liking may depend on
the emotional features, on the story or on the mood
the evaluator is experiencing.
M
e
Q
1
Q
3
ICT4AWE 2018 - 4th International Conference on Information and Communication Technologies for Ageing Well and e-Health
116
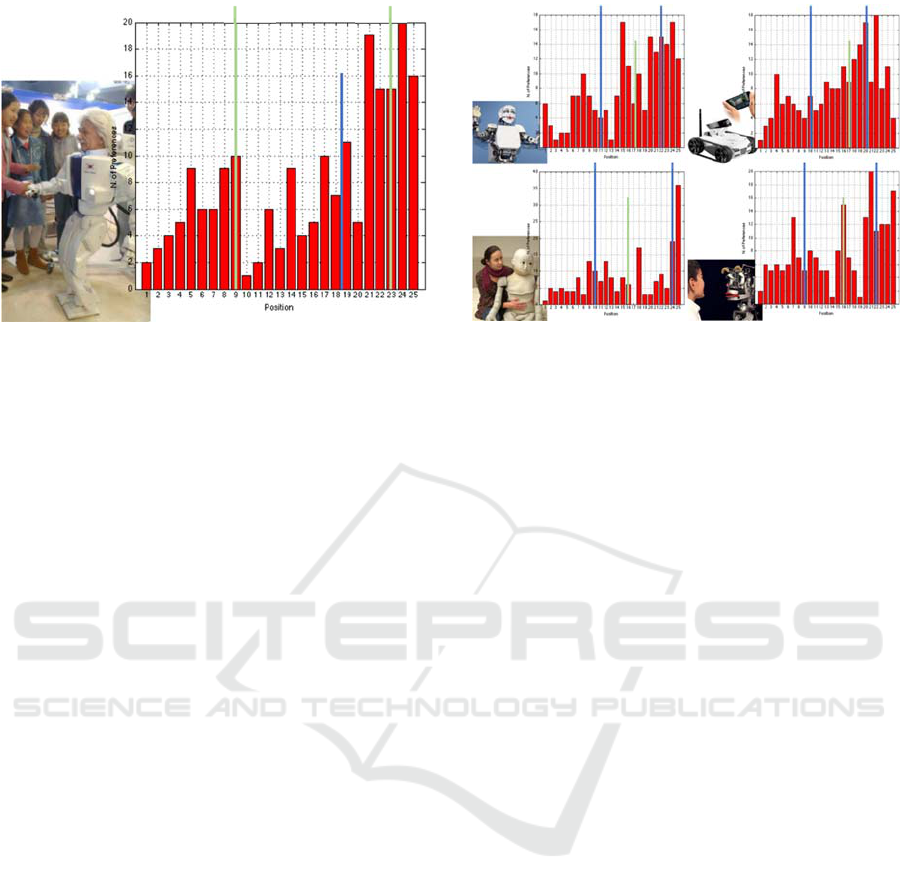
Figure 10: Albert Hubo position rate distribution. Q
1
and
Q
3
are the first and the third Quartile respectively and M
e
is the median value.
Robots rated with the 5 highest median value in the
card evaluation process mostly confirm the previous
deductions. Albert Hubo, the Japanese robot with the
Albert Einstein face, is placed in the worst position,
followed by Kobian, another Japanese humanoid
robot with human dimensions that can display seven
different emotions. The forth worst position is
occupied by CB2, the Japanese baby robot, and in
the fifth worst position we can find Kismet, the MIT
robot face able to recognize and reproduce emotions.
The presence of humanoid robots in the worst
positions also confirms also for elderly people the
theory of the Uncanny Valley proposed by Masahiro
Mori (Mori, 1970). Indeed humanoid objects which
appear almost, but not exactly, like real human
beings elicit uncanny or feelings or feelings of
strangeness and revulsion in observers. Moreover,
the dimension of these humanoid robots seems to be
critical to worsen the feeling of discomfort caused
by the humanoid robots. The surveillance robot can
affect everyone’s need of privacy. A robot
performing surveillance can be explicitly perceived
as a prosthesis, a privacy intrusion or a signal of loss
of independence and autonomy.
Furthermore, the presence in the picture of the
controller tablet induced a feeling of technological
inability.
5 CONCLUSIONS
In this paper, we presented an experiment on the
acceptability of robot caregivers done with 202
elderly people as participants. Preliminary results
suggest some important tips for designing a usable
artefact. While most critical negative factors are
Figure 11: Position rate distribution of Kobian, the
sorveillace robot, CB2 and Kismet.
large sizes, excess of human similarity, the feeling
of low level of controllability or an overly
mechanical aspect. The most popular robots seem to
be the ones that in some way maintain their robot
likeness. They should be small and can be perceived
as a toy or a puppy. Even if the puppy likeness
seems to elicit empathy, closeness, and confidence,
the resemblance to human babies seems not
sufficient to guarantee appeal. The robot should
maintain its robot identity, clearly recognizable. This
experiment showed that the most important features
therefore seem to be small sizes, cartoon traits
and/or animal appearances.
Naturally, this suggestion is critical because it is
difficult or impossible for small robots to perform
some service tasks. Some solutions can, probably, be
found in the direction of the distribution of services:
many small robots performing different tasks. Other
solutions can be reached by involving elderly people
in new robot design.
Last but not least, a robot caregiver should help
elderly people, but should also facilitate
communication with other human beings ( as the
high rate of Giraffplus shows).
Our results advance the understanding of older
adults’ attitudes and preferences which may
influence the design of robots more likely to be
accepted by older adults.
Future research will investigate in detail the feeling
elicited by the single robot, how older adults interact
with a physical robot and how/if attitudes change
over time.
M
e
Q
1
Q
3
The ACCEPTABILITY of Caregiver Robots in Elderly People
117

REFERENCES
Broekens, J., Heerink, M., Rosendal, H., 2009. Assistive
social robots in elderly care: a
review. Gerontechnology Volume 8(2):94–103.
Coradeschi S. et al., 2014. GiraffPlus: A System for
Monitoring Activities and Physiological Parameters
and Promoting Social Interaction for Elderly. In:
Hippe Z., Kulikowski J., Mroczek T., Wtorek J. (eds)
Human-Computer Systems Interaction: Backgrounds
and Applications 3. Advances in Intelligent Systems
and Computing, vol 300. Springer, Cham.
Ezer, N., Fisk, AD., Rogers, WA., 2009. More than a
servant: self-reported willingness of younger and
older adults to having a robot perform interactive and
critical tasks in the home. Poster presented at: 53rd
Annual Meeting of Human Factors and Ergonomics
Society, San Antonio, TX.
Goetz, J., Kiesler, S., Powers, A., 2003. Matching robot
appearance and behaviour to tasks to improve human-
robot cooperation. In: Proceedings of the 12
th
IEIIT
Workshop on Robot and Human Interactive
Communication (ROMAN 2003), San Francisco, CA,
pp. 55-60.
Graf, B., Hans, M., Schraft, R.D., 2004. Care-O-bot II—
Development of a Next Generation Robotic Home
Assistant. Autonomous Robots (2004) 16: 193.
Kaplan, F., 2005. Everyday robotics: robots as everyday
objects. In: Proceedings of Soc-Eusai 2005, Grenoble,
France, pp. 59-64.
Lohse, M., Hegel, F., Wrede, B., 2008. Domestic
applications for social robots: an online survey on the
influence of appearance and capabilities. Journal of
Physical Agents. Vol. 2, No. 2. ISSN 1888-0258, pp.
21-32.
Mori, M., 1970. Bukimi no tani. (The Uncanny Valley,
trans. by MacDorman, K.F. and Kageki, N. under
authorization by Masahiro Mori. IEEE Robotics &
Automation Magazine, 98–100.). Energy, 7(4) pp. 33–
35, (Originally in Japanese).
OECD, 2015. Ageing: Debate the Issues. OECD Insights,
OECD Publishing, Paris.
Pollack, M., 2005. Intelligent technology for an aging
population: the use of AI to assist elders with cognitive
impairment. AI Magazine Volume 26 Number 2.
Shibata, T., Wada, K., 2011. Robot Therapy: A New
Approach for Mental Healthcare of the Elderly – A
Mini-Review. Gerontology; 57:378–386.
Smarr, C., Mitzner, T., Beer, J., Prakash, A., Chen, T.,
Kemp, C., Rogers, W., 2014. Domestic Robots for
Older Adults: Attitudes, Preferences, and Potential.
Int J Soc Robot 6:229–247.
Toshiharu, M., Shinya, H., Hiromichi, N., Yo, K., Yuki,
S., Shijie, G., Shigeyuki, H., 2010, Development of a
Nursing-Care Assistant Robot RIBA That Can Lift a
Human in Its Arms. The 2010 IEEE/RSJ International
Conference on Intelligent Robots and Systems
October 18-22, 2010, Taipei, Taiwan.
Van der Heijden, H., 2004. Users acceptance of hedonic
information systems. Manag Inf Syst Q 28(4):695-704.
Wada, K., Shibata, T., Saito, T., Tanie, K., 2003. Effects of
robot assisted activity to elderly people who stay at a
health service facility for the aged. In: Proceedings of
IROS 2003: The IEEE/RSJ International Conference
on Intelligent Robots and Systems. pp 2847-2852.
Wu, Y., Wrobel, J., Cornuet, M., Kerhervé, H., Damnée,
S., Rigaud, A. 2014. Acceptance of an assistive robot
in older adults: a mixed-method study of human–robot
interaction over a 1-month period in the Living Lab
setting. Clinical Interventions in Aging 2014:9 801–
811.
Ziefle, M., Calero, V.A., 2017. Domestic Robots for
Homecare: A Technology Acceptance Perspective. In:
Zhou J., Salvendy G. (eds) Human Aspects of IT for
the Aged Population. Aging, Design and User
Experience. ITAP 2017. Lecture Notes in Computer
Science, vol 10297. Springer, Cham.
ICT4AWE 2018 - 4th International Conference on Information and Communication Technologies for Ageing Well and e-Health
118
