
Generic Fourier Descriptors for Autonomous UAV Detection
Eren Unlu
1
, Emmanuel Zenou
1
and Nicolas Riviere
2
1
ISAE-SUPAERO, 10 Av. Edouard Belin, Toulouse, France
2
ONERA, 2 Av. Edouard Belin, Toulouse, France
Keywords:
Aerial Surveillance, Drone Detection, Generic Fourier Descriptor, Shape Descriptors, Object Recognition.
Abstract:
With increasing number of Unmanned Aerial Vehicles (UAVs) -also known as drones- in our lives, safety and
privacy concerns have arose. Especially, strategic locations such as governmental buildings, nuclear power
stations etc. are under direct threat of these publicly available and easily accessible gadgets. Various methods
are proposed as counter-measure, such as acoustics based detection, RF signal interception, micro-doppler
RADAR etc. Computer vision based approach for detecting these threats seems as a viable solution due
to various advantages. We envision an autonomous drone detection and tracking system for the protection
of strategic locations. In this work, 2-dimensional scale, rotation and translation invariant Generic Fourier
Descriptor (GFD) features (which are analyzed with a neural network) are used for classifying aerial targets
as a drone or bird. For the training of this system, a large dataset composed of birds and drones is gathered
from open sources. We have achieved up to 85.3% overall correct classification rate.
1 INTRODUCTION
Recent advances in Unmanned Aerial Vehicles (UAV)
-usually preferred to refer publically as drones- indus-
try made these devices highly accessible to all kinds
of civilians. Licensing and regulating drone utiliza-
tion has lagged behind this rapid expansion of the in-
dustry. Besides their numerous advantages, drones
have a huge potential to be misconducted intention-
ally or non-intentionally. First of all, commercial
UAVs, even the cheapest and smallest ones can be
easily converted to a weapon for terrorism by attach-
ing explosives. Moreover, irresponsible utilization of
these devices may cause also panic and fatal acci-
dents. For example, during a football game in Texas,
a drone has entered the stadium’s airspace, causing
large panic for spectators and law enforcement units.
The responsible security forces rested helplessly as
they have lacked the proper surveillance and counter-
measuring equipment (Humphreys, 2015). In addi-
tion to this, commercial drones being flown around
airports raising concerns for civilian aviation secu-
rity. Numerous incidents caused by drones were re-
ported by aviation officers in recent years (Wild et al.,
2016).Also personal privacy issue and preventing in-
dustrial or governmental espionage is another serious
problem (Villasenor, 2013).
These incidents have caused a paradigm shift
for the governmental defence and public security
strategies, as these crafts cannot be detected effi-
ciently with conventional methods, such as RADARs
etc. due to their size and small electromagnetic sig-
natures (Peacock and Johnstone, 2013). Industry
and academy have focused on new kind of counter-
measure methods, where a solid consensus still is
not apparent. The mostly used methods for small to
medium sized UAV detection are RF detection (de-
tecting the RF signals for control between the oper-
ator and the drone), acoustics (detecting certain spe-
cific sounds emitted from the rotors of the drone), X-
band RADAR, micro-doppler signature (RADAR for
detecting small moving objects like drones) and the
optical methods (detection by computer vision) (Yoon
et al., 2017)(Franklin and Hearing, 2016)(Solodov
et al., 2017). Each of these methods has its own ad-
vantages or drawbacks. For instance, acoustics based
detection with directional microphone arrays has a
relatively low range of approximately 250 meters.
And they are highly sensitive to background noise,
which is a complicated problem especially in urban
areas. RF signal interception disregards the fact that
certain drones may not be controlled via wireless con-
nection, but may have been preprogrammed to follow
a certain route. Micro-doppler and X-band radar strat-
egy often causes high number of false alarms, caused
by birds, background clutter etc. Thus, they are gen-
550
Unlu, E., Zenou, E. and Riviere, N.
Generic Fourier Descriptors for Autonomous UAV Detection.
DOI: 10.5220/0006680105500554
In Proceedings of the 7th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2018), pages 550-554
ISBN: 978-989-758-276-9
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

erally accompanied an additional detection and iden-
tification apparatus.
Among these strategies, detection by computer vi-
sion distincts itself with its efficiency and robustness.
It can also be applied to infrared cameras, thus pro-
viding night time operation capability. In this paper,
we present a new method for drone detection with
computer vision. This method can also be applied to
infrared imagery. We assume that a moving object
detecting background subtraction algorithm is contin-
uously used and detected blobs’ binary silhouette is
examined with the Generic Fourier Descriptor (GFD)
based algorithm to detect drones. In second section,
we refer to existing drone detection technologies by
computer vision approach and in the third section we
explain the Generic Fourier Descriptor (GFD) pro-
posed by (Zhang and Lu, 2002) and our approach
to detect drones. One of the most important chal-
lenges for drone detection is avoiding false alarms
caused by the birds (G
¨
okc¸e et al., 2015). Thus, we
have used flying bird silhouettes also in our algo-
rithm for better discrimination capability. Next, in the
fourth section we explain our experimentation method
and results. Thanks to this approach, we could have
achieved 85.3% overall correct classification rate be-
tween drone and bird silhouettes.
2 COMPUTER VISION FOR UAV
DETECTION
As mentioned previously, computer vision for de-
tecting drones is a more robust, feasible and effec-
tive method compared to other existing ones. Con-
volutional Neural Networks (CNNs) are the state-of-
the-art method for object detection and identification,
which has not a long history (Ciresan et al., 2011).
It is a deep learning technique, which autonomously
learns the optimal features for classification by im-
agery, thus does not depend on human crafted features
(Simard et al., 2003). Recently, for computer vision
based detection various authors have oriented them-
selves to CNNs. Among these, we see (Schumann
et al., 2017)(Saqib et al., 2017)(Aker and Kalkan,
2017), which are using very similar approach for
CNNs, however with different architectures. CNNs
may be the most recent and state-of-the-art solution in
the literature, however they require extensive compu-
tational cost, especially for training. In addition, their
accuracy may be still low for certain circumstances
such as low resolution, insufficient dataset etc.
Rather than CNNs, (Unlu et al., 2017) uses SURF
based keypoint features of grayscale drone, bird and
background image patches. The authors propose a
new kind of extended bag-of-words (BoW) approach
for classification. In this paperwork, we propose a
GFD based approach for classifying image patches
composed of birds and drones similar to those in
(Unlu et al., 2017).
3 GFD BASED DRONE
DETECTION
3.1 Generic Fourier Descriptors
Fourier Descriptors have been used as an efficient
shape descriptor (Persoon and Fu, 1977). The dis-
tances of each contour pixel to the center of mass of
the 2D object silhouettes is represented as a vector.
Fourier Transform of this vector gives a unique de-
scription of the shape as the transform itself is shift,
scale and rotation invariant.
Generally, the lower frequencies of the transform
contains more information on the major structural
parts of the object. If we interpret the mechanism of
the algorithm, we can state that higher frequencies of
the transform correspond to the more intensive ripples
on the contour.
However, even this approach can differentiate
non-similar silhouettes with high efficiency, the clas-
sification performance degrades as the contours get
similar. In addition to this, as mentioned previously,
this algorithm only considers the shape of the out-
side contours. However, the form of the silhouettes
can contain very important and distinctive informa-
tion such as holes etc. An approach taking into ac-
count the complete silhouette shall be more robust to
noise which can miss certain number of pixels.
Generic Fourier Descriptor (GFD) is a method
proposed by (Zhang and Lu, 2002), which takes into
account the 2D object silhouette in contrast the uni-
dimensional Fourier Descriptors. The idea is to first
raster and transform the pixels of the silhouette to po-
lar coordinates with chosen angular and radial reso-
lutions. Normalized 2D Fourier transform (Eq. 1) of
this rastered function generates two dimensional ma-
trix which we use as the representation of the shape.
When this result is being used for classification with
various algorithms, it is vectorized (Zhang and Lu,
2002).
GFD(R, T ) =
∑
r
∑
θ
( f (r, θ))e
(− j2πr
θ
R
)+2π
θ
T
(1)
As it is normalized, this method is intrinsically
scale invariant. And due to polar mapping by tak-
ing the center of mass as the origin, it is also translate
Generic Fourier Descriptors for Autonomous UAV Detection
551
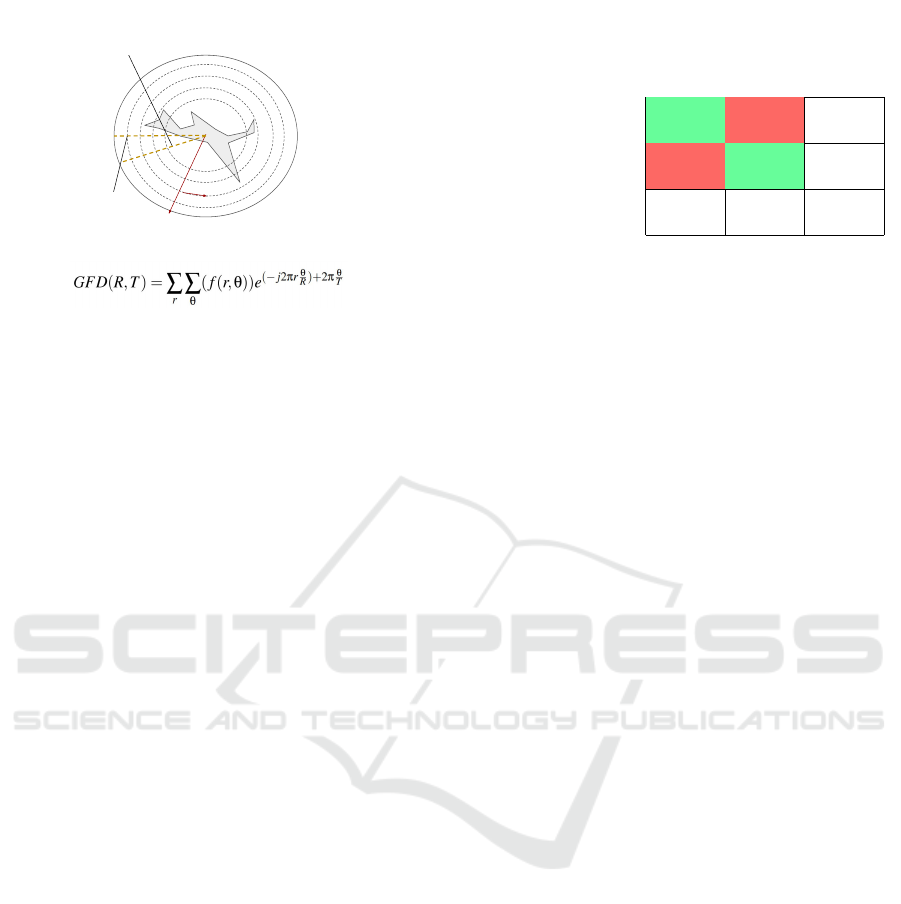
Angular
resolution
Radial
resolution
2D GFD transformation
Figure 1: The GFD transformation of a 2D object silhou-
ette.
and rotation invariant just like the regular Fourier De-
scriptors. Fig. 1 illustrates the GFD calculation of a
2D object silhouette.
3.2 Aerial Surveillence by Using GFD
The binary silhouettes of objects are composed of 1s
(where the pixel corresponds to object) and 0s (where
pixel corresponds to background) in an arbitrary size
frame. These are determined by the moving object
detector (background subtraction). Then, we classify
the object by using Generic Fourier Descriptor (GFD)
features and a neural network. In order to train our
system, we have created a dataset, composed of im-
ages of flying birds and drones, which are acquired
from open sources.
To seperate the object pixels from the background,
a special image segmentation algorithm is applied.
We have composed the dataset from the images,
where the object is darker than the background (i.e.
sky). The images are chosen to be relatively low reso-
lution in order to reflect the target case, where the au-
tonomous tracker detect a small flying object in wide
angle. All images are converted to gray scale and
rescaled to 64x64 pixels. Fig. 2 shows few of the
images from the dataset both for drones and birds.
Region Growing algorithm is chosen as the image
segmentation algorithm to seperate the object silhou-
ettes from the background in the images due to its effi-
ciency (Adams and Bischof, 1994). Region Growing
is a method, where pixel neighborhoods are evaluated
in an iterative manner, starting from an initial seed
point. Over course of the algorithm, the pixels are
defined as background or foreground, by applying a
clustering criterion.
After we have seperated the object silhouettes, we
have applied a 2D GFD algorithm with 16 radial and
9 angular resolutions (therefore, we have feature vec-
tors composed of 144 scalar values for each object.).
Table 1: Confusion matrix for the classification of bird and
drone silhouettes in test set.
Bird
207
68.3%
29
9.6%
87.7%
12.3%
Output
Class
Drone
14
4.6%
53
17.5%
79.1%
20.9%
93.7%
6.3%
64.6%
35.4%
85.8%
14.2%
Target
Class
Bird Drone
In order not to lose any shape information, we have
not applied any morphological operations after im-
age segmentation phase. For most of the cases, after
image segmentation there is no need for further pro-
cessing to acquire the true binary silhouettes of the
objects. However, in case there are more than one
disconnected pixel groups, the algorithm chooses the
largest pixel group as the true binary silhouette of the
object. To apply GFD, the binary silhouettes of the
objects have to be centered in a 2D plane, where their
center of mass is the origin. Note that, as GFD is a
scale and rotation invariant transform, there is no need
for rescaling or rotation for the silhouettes. Fourier
Transformation results are normalized and reshifted
before further processing. Following this, we have
created a neural network composed of approximately
6000 neurons to classify GFD features in to birds and
drones.
4 EXPERIMENTATION AND
RESULTS
We have used 410 drone images and 930 bird images.
A 5-fold approach is followed, where 4/5 of the sam-
ples are always used for training and the 1/5 of the
samples is used for testing. In addition to this, to as-
sure the validity of the experiments, the training sam-
ples are again divided in an additional 5-fold manner,
where the test group is used for developing regulariza-
tion parameters during the optimization of the neural
network.
We have acquired an overall 85.3% accuracy on
the test groups. The Table 1 shows the confusion ma-
trix for a test group (0 : birds and 1 : drones). As
it can be seen, the GFD based algorithm is especially
effective at detecting bird shapes, with a true rate of
93.7%. However, we see that only 64.6% of drones
are correctly identified. The overall accuracy shows
that GFD is a novel 2D shape descriptor for discrim-
inating bird and drone silhouettes for an autonomous
drone surveillence system.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
552

Birds
Drones
Background
Figure 2: A few examples of the 64x64 grayscale bird, drone and background patches from the images we have collected
from the internet.
5 CONCLUSION
We have showed that GFD can be used as a valuable
shape descriptor along with a complex neural network
for an autonomous drone surveillence system. To the
best of our knowledge, using GFD with neural net-
works for an aerial surveillence system has not been
visited. The results may be further augmented by us-
ing a larger dataset and additional features.
This approach may compete with the currently
preferred CNN based algorithms, which require ex-
tensive computational power and very large datasets,
while providing no information on the curvature of
the object. Another advantage of GFD based algo-
rithm is its potential ability to be used for motion
based changes. This can be performed by analyzing
temporal changes of GFD features. For CNNs this
analysis is cumbersome and needs other type of deep
learning techniques.
ACKNOWLEDGEMENTS
This work is supported by the French Ministry of De-
fence.
REFERENCES
Adams, R. and Bischof, L. (1994). Seeded region growing.
IEEE Transactions on pattern analysis and machine
intelligence, 16(6):641–647.
Aker, C. and Kalkan, S. (2017). Using deep networks for
drone detection. In Advanced Video and Signal Based
Surveillance (AVSS), 2017 14th IEEE International
Conference on, pages 1–6. IEEE.
Ciresan, D. C., Meier, U., Gambardella, L. M., and
Schmidhuber, J. (2011). Convolutional neural net-
work committees for handwritten character classifica-
tion. In Document Analysis and Recognition (ICDAR),
2011 International Conference on, pages 1135–1139.
IEEE.
Franklin, J. and Hearing, B. (2016). Drone detection and
classification with compensation for background clut-
ter sources. US Patent App. 15/360,069.
G
¨
okc¸e, F.,
¨
Uc¸oluk, G., S¸ ahin, E., and Kalkan, S. (2015).
Vision-based detection and distance estimation of mi-
cro unmanned aerial vehicles. Sensors, 15(9):23805–
23846.
Humphreys, T. (2015). Statement on the security threat
posed by unmanned aerial systems and possible coun-
termeasures. Oversight and Management Efficiency
Subcommittee, Homeland Security Committee, Wash-
ington, DC, US House.
Peacock, M. and Johnstone, M. N. (2013). Towards detec-
tion and control of civilian unmanned aerial vehicles.
Persoon, E. and Fu, K.-S. (1977). Shape discrimination us-
ing fourier descriptors. IEEE Transactions on systems,
man, and cybernetics, 7(3):170–179.
Saqib, M., Khan, S. D., Sharma, N., and Blumenstein, M.
(2017). A study on detecting drones using deep con-
volutional neural networks. In Advanced Video and
Signal Based Surveillance (AVSS), 2017 14th IEEE In-
ternational Conference on, pages 1–5. IEEE.
Schumann, A., Sommer, L., Klatte, J., Schuchert, T., and
Beyerer, J. (2017). Deep cross-domain flying object
classification for robust uav detection. In Advanced
Video and Signal Based Surveillance (AVSS), 2017
14th IEEE International Conference on, pages 1–6.
IEEE.
Simard, P. Y., Steinkraus, D., Platt, J. C., et al. (2003). Best
practices for convolutional neural networks applied to
visual document analysis. In ICDAR, volume 3, pages
958–962.
Solodov, A., Williams, A., Al Hanaei, S., and Goddard, B.
(2017). Analyzing the threat of unmanned aerial vehi-
Generic Fourier Descriptors for Autonomous UAV Detection
553

cles (uav) to nuclear facilities. Security Journal, pages
1–20.
Unlu, E., Zenou, E., and Riviere, N. (2017). Ordered mini-
mum distance bag-of-words approach for aerial object
identification. In Advanced Video and Signal Based
Surveillance (AVSS), 2017 14th IEEE International
Conference on, pages 1–6. IEEE.
Villasenor, J. (2013). Observations from above: unmanned
aircraft systems and privacy. Harv. JL & Pub. Pol’y,
36:457.
Wild, G., Murray, J., and Baxter, G. (2016). Exploring civil
drone accidents and incidents to help prevent potential
air disasters. Aerospace, 3(3):22.
Yoon, J. H., Xu, H., and Carrillo, L. R. G. (2017). Ad-
vanced doppler radar physiological sensing technique
for drone detection. In SPIE Defense+ Security, pages
101880S–101880S. International Society for Optics
and Photonics.
Zhang, D. and Lu, G. (2002). Shape-based image retrieval
using generic fourier descriptor. Signal Processing:
Image Communication, 17(10):825–848.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
554
