
Towards Multi-object Detection and Tracking in Urban Scenario under
Uncertainties
Achim Kampker
1
, Mohsen Sefati
1,∗,†
, Arya S. Abdul Rachman
2,∗
, Kai Kreisk
¨
other
1
and Pascual Campoy
3
1
Chair of Production Engineering of E-Mobility Components, RWTH Aachen University, Aachen, Germany
2
Delft Center for Systems and Control, Delft University of Technology, Delft, The Netherlands
3
Computer Vision and Aerial Robotics Group, Centre of Automatics and Robotics,
Universidad Polit
´
ecnica de Madrid, Madrid, Spain
K.Kreiskoether@pem.rwth-aachen.de, Pascual.Campoy@upm.es
Keywords:
Multi Object Tracking, Perception, 3D LIDAR, Autonomous Driving, Probabilistic Filtering.
Abstract:
Automated vehicles in urban scenarios require a reliable perception technology to tackle the high amount of
uncertainties. In this paper a real-time framework for multi-object detection and manoeuvre-aware tracking
is presented, where the application of 3D LIDAR for a cluttered urban environment is demonstrated. Our
approach combines sensor occlusion-aware detection method with computationally efficient rule-based filter-
ing and adaptive probabilistic tracking to handle uncertainties arising from sensing limitation of 3D LIDAR
and complexity of the targets’ movement. The evaluation results using real-world pre-recorded data and com-
parison with state-of-the-art shows that the presented framework is capable of achieving promising tracking
performance in the urban scenarios.
1 INTRODUCTION
Advanced Driver Assistance Systems (ADAS) and Au-
tomated Driving (AV) have been the focus of many re-
search activities for several decades. Achieving higher
automation levels for AVs also imposes higher require-
ments on environment perception. By advancing from
highways to urban and intercity scenarios, further chal-
lenges have to be met, especially with respect to the
tasks of detection and tracking. In a typical urban
scene the AV is surrounded by multiple traffic objects
of different types (pedestrians, cyclists, cars, trucks,
etc.) with different skills and movement patterns. The
AVs should be able to detect and associate these ob-
jects with corresponding context information from the
modelled scene and predict their feature behaviour for
the subsequent tasks such as decision making and tra-
jectory planning. The basis for this is the ability to clas-
sify between dynamic and static objects and keeping
the tracking of dynamic objects in a continuous man-
ner. Consequently, multi-object detection and tracking
become essential for AVs perception.
∗
These authors contributed equally to the paper
†
Corresponding author
The recently introduced compact 3D LIDAR scan-
ner (Velodyne, 2007) is especially suitable for multi-
object detection and tracking task, since it enables far-
reaching high fidelity acquisition of surrounding spa-
tial information, which is not possible with conven-
tional sensing technologies. LIDAR-based perception
tasks geared toward autonomous vehicle is a widely
discussed topic. Among others, (Luo et al., 2016) sug-
gest real-time capable LIDAR detection and tracking,
(Chen et al., 2015) introduce model-based detection
for surrounding vehicles, (Himmelsbach and Wuen-
sche, 2012) propose a top-down bottom-up approach
to enhance detection and tracking result while simul-
taneously doing classification. Notwithstanding, there
are comparably fewer literatures, which address the
holistic integration of LIDAR perception tasks aimed
toward practical use in the urban situation. (Zhang
et al., 2011), (Wojke and Haselich, 2012), and (Choi
et al., 2013) notably propose a complete scheme of
Multi Object Tracking (MOT). However, these im-
plementation does not specifically target the use-case
of urban driving, and limitation of vehicle embedded
computer is not necessarily taken into account.
156
Kampker, A., Sefati, M., Abdul Rachman, A., Kreisköther, K. and Campoy, P.
Towards Multi-Object Detection and Tracking in Urban Scenario under Uncertainties.
DOI: 10.5220/0006706101560167
In Proceedings of the 4th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2018), pages 156-167
ISBN: 978-989-758-293-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
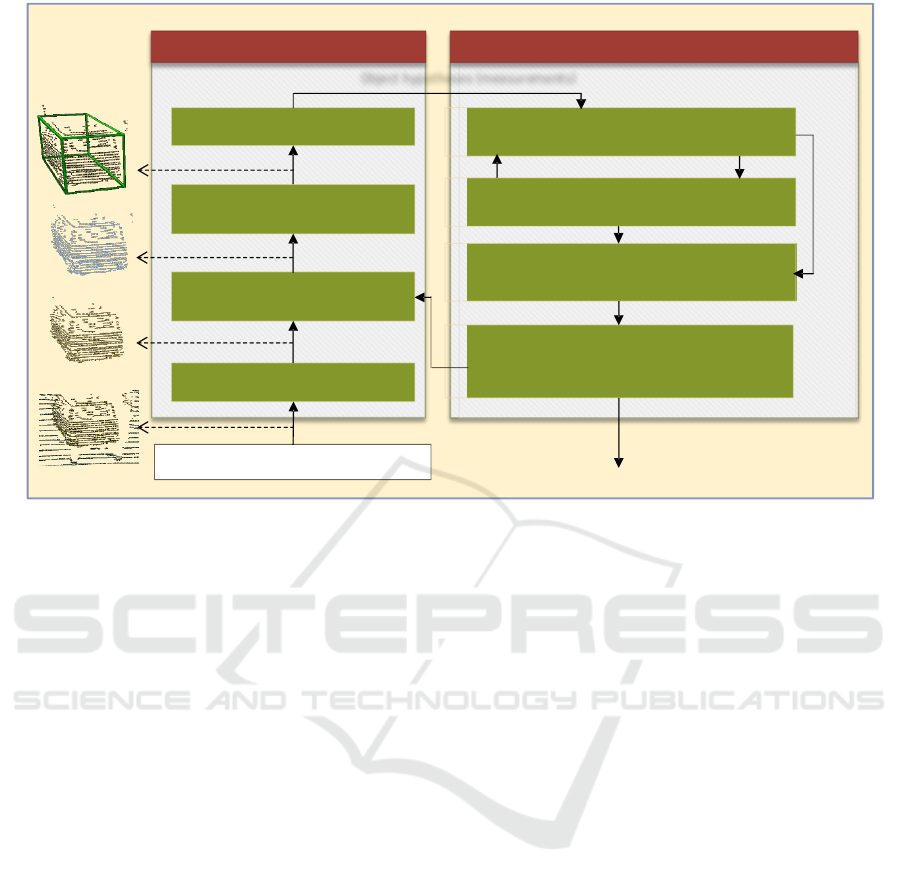
Data acquisition (e.g. LIDAR)
Ground Extraction
Raw data:
Point clouds
Clustering and Segmentation
Connected Components
Bounding Box Fitting
MAR & L -Shape Fitting
Rule - based Filtering
Data Association
(JPDA)
Tracking Filter
(IMM- UKF)
Track Management
Maturity Check & Dynamic Classification
Box Correction
Dimension & Perspective Correction & Over/ &
Under-Segmentation Handling
Elevated
measurements
Organized
measurements
Bounding
boxes
Object hypotheses (measurements)
New
tracks
Predictions
Track
list
Mature tracks
Updated tracks
Proposed Framework
Detection Multi-Object Tracking
Associations
Figure 1: Structure of the proposed multi-object detection and tracking.
This paper presents a complete framework and
pipeline for multi-target object detection and tracking
for urban scenarios based on a hybrid approach, where
both grid-based and object-based techniques are com-
bined. The proposed framework is designed to cope
with multiple targets, cluttered environment (i.e. the
objects are close to each other), occlusions and uncer-
tainties by applying a set of computationally efficient
strategies. The main advantage of this framework is
robustness against common uncertainties in urban sce-
narios with the application of probabilistic approaches
for data association and tracking filters. In addition
to that, promising tracking reliability with dynamic
classification is achieved. The input of the framework
is 3D LIDAR raw data in the form of point cloud,
while the output is a track list of associated objects
with their corresponding dynamic and geometric prop-
erties together with association probabilities. In this
work, the framework is demonstrated by data acquired
from a state-of-art Velodyne HDL-64E LIDAR sen-
sor, because of its advantages regarding accuracy, field
of view, and sampling rate of three-dimensional envi-
ronmental measurements. However, this framework is
also applicable to other sensor technologies, since it
mainly relies on generic grid-based and object-based
approaches.
The rest of the paper is structured as follow: an
overview of the structure and main functions of the
framework is given in section 2. Section 3 describes
the detection part, where the non-ground measure-
ments are extracted and object hypotheses are gener-
ated. The multi-object tracking with its main compo-
nents are presented in section 4, and the further post-
processing functions for dimension correction are pre-
sented in section 5. Finally, the framework is evaluated
in section 6 by the use of raw data from KITTI data set
(Geiger et al., 2013) and MOT16 (Milan et al., 2016)
evaluation metrics.
2 SYSTEM ARCHITECTURE
The framework can be divided into two main function
categories: detection and tracking. The input of the
detection part is a 3D point cloud, which has to be
divided into non-ground and elevated measurements.
This is accomplished by a slope-based ground removal
approach and a subsequent filtering process. In a fur-
ther step, object hypotheses for the tracking targets are
generated in a clustering step. The objects of interest
are extracted by means of a subsequent feature-based
bounding box fitting and a rule-based filtering.
The tracking is done based on centroid tracking of
generated bounding boxes with four main steps: data
association, tracking filters, tracking management and
bounding-box correction. In the association step, a set
of object hypotheses is determined, which correspond
to the predicted measurements based on the already
established tracks. In a case of a possible association,
the track is updated with an associated measurement,
Towards Multi-Object Detection and Tracking in Urban Scenario under Uncertainties
157

otherwise a new track is created. The prediction and
update steps are done by means of tracking filters. The
track management maintains all tracks; labels their
maturity and filters out the non-feasible and old ones.
Finally, the bounding-box correction assign valid
bounding box dimensions to the mature tracks and
uses the track history in order to update this informa-
tion with new measurements. Figure 1 illustrates the
framework structure with its main components. The
algorithmic implementation of the framework is dis-
cussed in Section 3 to 5.
3 DETECTION
3.1 Ground Extraction
The ground extraction is an important pre-processing
step, in which all incoming 3D points are binary la-
belled into two groups of ground and non-ground el-
ements. The term ground is considered as navigable
and reachable area, which surrounds the ego-vehicle.
The urban scenarios may have different types of ter-
rain. Therefore, the ground extraction must be able
to handle non-flat, sloped and uneven surfaces. This
module is the first component in the whole framework
and has to deal with entire data coming from the sen-
sor. Thus, its computational performance is an impor-
tant aspect. For this goal, a combination of channel-
based and scan-based approach is used in this work.
In the proposed approach, a slope-based and channel-
wise classification is performed on a polar grid and
by means of the modified technique from (Himmels-
bach and Wuensche, 2012). After an initial estimation
of the ground surface is achieved, the interrelation-
ship between channels and the consistency of the es-
timated ground is checked subsequently. For this aim,
the height comparison between the neighbour cells in
a polar grid is applied. The estimated ground surface
is smoothed and the missing spatial information are
filled by applying a median filter. Figure 2 shows the
result of ground extraction and the effect of consis-
tency check and median filter.
3.2 Clustering
The first step towards the hypotheses generation is
to divide an unorganised and non-ground point cloud
into the smaller parts. This step is called clustering
and can be done in 3D, 2.5D and 2D. Since the com-
putational cost for 3D clustering is usually so high,
the clustering problem is treated as a 2D-problem by
mapping all elevated 3D points to a 2D grid as it is
Raw data
Slope-Based classification:
Some false classification
Consistency Check:
False classification reduced
Median Filter:
false classification eliminated
1 2
3 4
Figure 2: Main steps of the ground extraction: 1) raw data,
2) result of the ground estimation, 3) result of consistency
check and 4) result of median filter.
proposed by (Levinson et al., 2011) and (Himmels-
bach et al., 2010). The clustering in this work is ac-
complished by applying the Connected Component
Clustering (Pfaltz, 1966) in Cartesian grid representa-
tion. This approach has its origin in computer vision
for clustering the 2D binary images. However it has
also been used for 3D LIDAR point cloud (cf. (Rubio
et al., 2013). The Connected Component Clustering
is applied to the point cloud based on the row-to-row
approach. This approach makes two passes: 1) stor-
ing equivalences and assigning the temporary label
for ”connectedness” of cells and 2) determining the re-
lation between the equivalence classes and replacing
the temporary labels.
Initially, the whole grid is checked for the occupancy
and the cells are assigned with two initial states for
empty (0) and occupied (-1). Each cell in the grid is ex-
amined for the connectivity by checking the occupied
neighbour cells and using the spatial kernel
K
s
with
size
s
. If the target cell belongs to the same region as
the neighbour cells, the same cluster ID is assigned to
it. Otherwise, the new ID is created by incrementing
the ID by one. If the connected neighbour cells are
already assigned with different cluster IDs, the mini-
mum ID will be chosen as the target cell. After all oc-
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
158
cupied cells are assigned with a cluster ID, the second
pass uses a union-find data structure to replace each
cell label with its equivalent class and avoid multiple
labels for a single connected region. Since the size of
the kernel defines the maximum spatial distance be-
tween two connected cells within the same cluster, it
is responsible for over- and under-segmentation error,
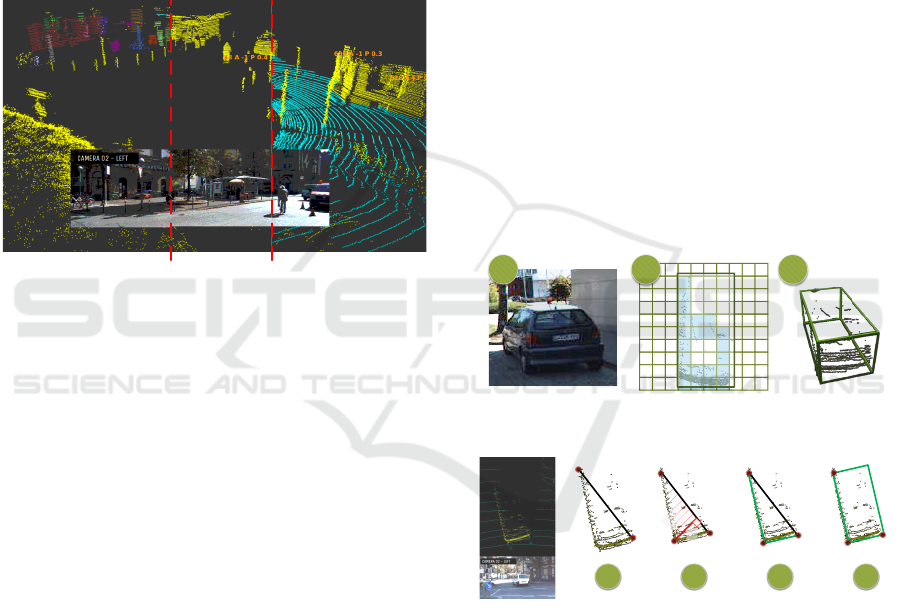
which is taken into account later in section 5.3. Fig-
ure 3 shows three partial snapshots of the same scene,
where the ground classification, ground removal and
clustering have been applied subsequently. Different
colours in the left part of the figure refer to the differ-
ent clusters in the scene.
Clustered
Ground
Removal
Raw Data
Figure 3: Measurement pre-processing: ground removal and
clustering.
3.3 Bounding Box Fitting
The clusters of 3D points which are recognised as ob-
jects provide limited information about the pose of
the objects. Moreover, some parts of the objects might
be seen only partially with LIDAR. Thus, a further
process is required in order to formulate a better hy-
pothesis about each object. In order to tackle this, a
3D bounding box representation, which gives better
information about the dimension and orientation of
the detected objects is chosen. Generally, there are two
groups of approaches for bounding box fitting: feature-
based and model-based approaches (Chen et al., 2015).
The model-based approaches offer more accuracy and
better results than the feature-based approaches, due
to the use of rectangle or cuboid models together with
the application of optimization or sampling techniques.
However, they suffer from high computational cost
and are therefore not suitable for urban scenarios with
a high number of detected objects. Thus, a feature-
based method is proposed for this work, where its re-
sult is improved continuously by integrating the track-
ing results back to the detection.
First, the Minimum Area Rectangle (MAR) (Freeman
and Shapira, 1975) is applied to the 2D cluster in or-
der to create the initial bounding box. The height in-
formation of each cluster is retained, by deriving the
difference between the highest and the lowest point.
This information can be used for forming of 3D ori-
ented bounding box (cf. Figure 4). The MAR approach
is sufficient for most of well-defined clusters. How-
ever, this approach might fail for occluded objects and
leads to erroneous heading angle, where there are not
enough measurement points available. To tackle this
issue, a feature-based L-shape fitting approach is ap-
plied, which corrects the box orientation. Similar to
(Ye et al., 2016), the L-shape fitting is done by extract-
ing the outer contour of the cluster. As it is shown in
Figure 5, the farthest outlier points
x
1
and
x
2
are se-
lected, which are laying on the opposite side of the ob-
ject facing the LIDAR sensor. The line
L
d
is drawn be-
tween two points and an orthogonal line
L
0
is obtained
with the maximum distance
d
max
and angle close to 90
deg
by applying the Iterative End Point (IEPF) algo-
rithm. The corner point
x
3
can be found near to the
L
0
, which forms together with
x
1
and
x
2
an L-shape
polygon. The heading is then described by the longest
line of the L-shape which is a valid assumption for the
most of traffic objects such as vehicles and cyclist.
1 2 3
Figure 4: MAR box fitting with embedded height.
1
x
2
x
1
x
2
x
3
x
L
d
L
d
1
x
2
x
3
x
L
d
width
length
1
x
2
x
3
x
1 2 3 4
max
d
O
L
Figure 5: L-shape fitting for a more accurate bounding box
fitting.
4 MULTI-OBJECT TRACKING
4.1 Tracking Algorithm
The object tracking refers to the problem of determin-
ing the number of objects of interest, their identities
and their states based on sensor measurements. In this
work, the states are position, velocity and yaw angle
and yaw rate. The result of a tracking algorithm re-
lies mainly on two parts of data association and track-
Towards Multi-Object Detection and Tracking in Urban Scenario under Uncertainties
159

ing filter. There are three important aspects, which are
needed to be taken into account by selection of opti-
mal data association for urban scenarios: 1) handling
multiple objects with different movement patterns, 2)
handling cluttered environment and 3) computational
efficiency.
Based on these requirements the Joint Probabilistic
Data Association (JPDA) (Bar-Shalom and Li, 1995)
is chosen for this work. For the filtering part, typical
approaches are based on Bayesian Filtering such as
Kalman and Particle Filters, which deal with a single
motion model to predict and update object states. Even
by the presence of a perfect motion model represent-
ing the object trajectory, there is no guarantee, that the
object always follows this model. The objects in ur-
ban traffic may have different movement patterns and
switch between different maneuvers described by dif-
ferent models. Therefore, a maneuver-aware tracking
approach which is capable of dealing with multiple
motion models has to be applied. Among different
maneuver-aware target tracking algorithms, the Inter-
acting Multiple Model (IMM) (Genovese, 2001) based
on an optimal Kalman Filter shows a promising perfor-
mance. Beside an improvement in the filtering process,
an additional advantage of IMM is the dynamic classi-
fication.
Further advantages can be achieved by application of
non-linear models, which also requires non-linear esti-
mation filters such as Extended Kalman Filter (EKF),
Unscented Kalman Filter (UKF) or Particle Filter (PF).
(Gao et al., 2012) and (Djouadi et al., 2005) have
shown that IMM-UKF has a better performance than
IMM-EKF. Thus, a tracking algorithm is proposed in
this work based on a coupled filter JPDA-IMM-UKF
for three motion models: Constant Velocity, Constant
Turn Rate, and Random Motion, which can deal with
the tracking of multiple manoeuvring objects in a clut-
tered environment. It can be noted, that there are al-
ready similar implementations for coupled filters such
as IMM-UK-PDA(Schreier et al., 2016a), IMM-UK-
MHT (Blackman, 2004) and IMM-PF (Wang et al.,
2015). However, the JPDA-IMM-UKF is not applied
for the LIDAR and urban scenarios yet, which is the
contribution of this work.
The JPDA-IMM-UKF algorithm consists of four main
steps: 1) Interaction, 2) Prediction-and-Measurement
Validation Step, 3) data Association-and-Model-
Specific Filtering Step and 4) Mode Probability
Update-and-Combination Step. Compared to existing
closely related implementation PDA-IMM-UKF ap-
plied to RADAR (see (Schreier et al., 2016b)), JPDAF
is used instead of the conventional PDAF since we are
performing multi-object tracking and considering the
presence of clutter. The association probability
β
be-
tween each track
t
and measurement
j
considering all
feasible joint association events
θ
across all measure-
ments Z
k
is given by (Bar-Shalom and Li, 1995):
β
jt
(l) ≡=
∑
θ:θ
jt
∈θ
P{θ
k
|Z
k
} (1)
With computed Kalman gain
K
, and innovation term
z
k
−
ˆ
z
−
k
; the updated system states
ˆ
x become:
ˆ
x
k|k
=
ˆ
x
k|k−1
+ K
k
(v
k
)
with v
k
=
N
v
∑
m=1
β
m,k
(z
k
−
ˆ
z
−
k
)
(2)
4.2 Track Management
There are two main objectives considered for track
management in this work: 1) maturity check and prun-
ing, and 2) dynamic classification.
4.2.1 Maturity Check and Pruning
Each track is assumed as ”immature” once it is ini-
tialised based on the first association with a measure-
ment. Subsequently, the status will be changed to ”ma-
ture” after it is seen for a more than
n
i
= 3
consecutive
time frames. As long as the track is not initialised or
associated with a wrong measurement out of the valid
range, its state is defined as ”invalid” and set to zero.
Once it is initialised, the state is set to ”initialising”
and incremented by one. After it is seen in multiple
consecutive frames, it is assumed as mature and its sta-
tus is set to ”tracking” and incremented further. The
track enters the ”drifting” status by a further state in-
crement, as soon as its measurement is lost at the next
time step. Once a feasible measurement is found in
the next frame the status is changed back to ”tracking”
and the state is decremented. Otherwise, the state is
incremented up to
n
d
= 3
frames, where the status is
reset to ”immature”.
One of the undesirable traits of JPDA filter is its ten-
dency to coalesce when the neighbouring track shares
the same measurement. In order to prevent duplicate
tracks associated with the same measurement, a hybrid
pruning approach is developed based on track history
and Euclidean distance. The track is considered as du-
plicate if the cumulative sum of standard deviation is
less than a predefined threshold called history gating
level. In this case, the track with shorter life time is
deleted. Furthermore, the Euclidean distance between
each track pair is calculated and checked against the
physically possible distance in urban scenes. If the dis-
tance is less than a threshold, the newer track will be
deleted.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
160

4.2.2 Dynamic Classification
Classifying the dynamic objects is a non-trivial task
due to the presence of measurement and detection
noise, occlusion and therefore jumping object frames.
Thus, the velocity thresholds are not sufficient for dy-
namic classification and further information has to be
taken into account. Similar to (Schreier, 2017) the
classification is done by incorporating both velocity
thresholds and IMM probabilities. The object is clas-
sified as static, when it has a zero or close to zero ve-
locity together with a higher probability of a Random
Motion Model. Since the estimated velocity is not nec-
essarily smooth, an average velocity of previous
n = 3
frames is taken into account for the classification.
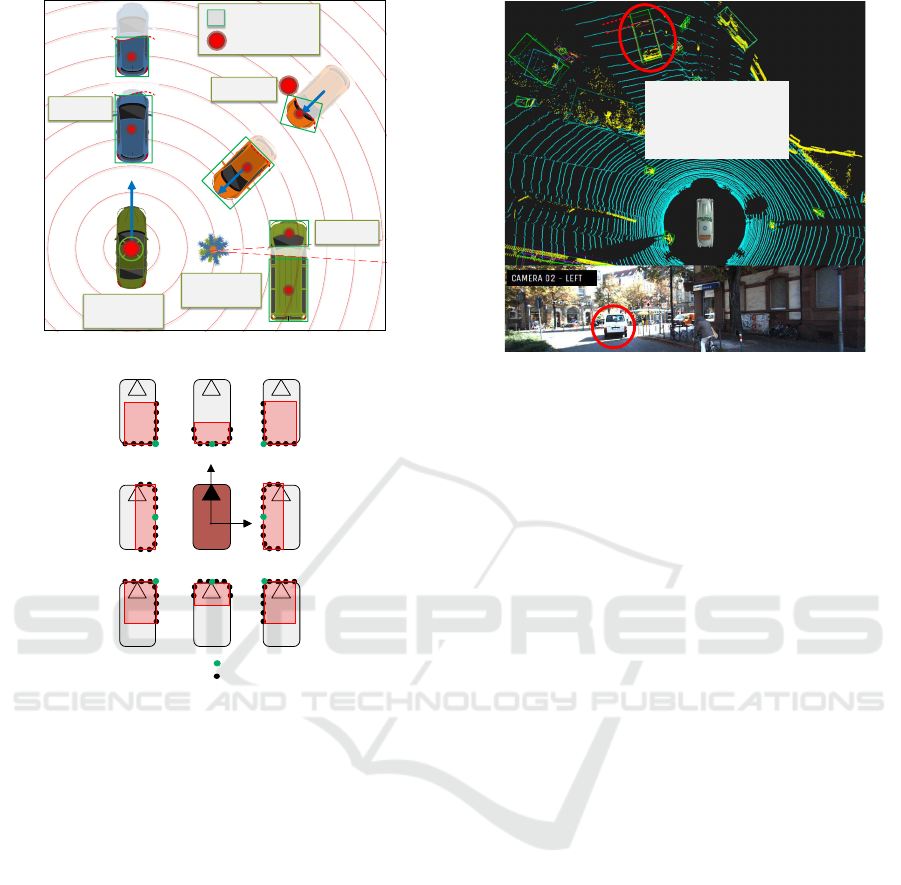
Figure 6 shows an intersection in an urban scene with
different traffic objects waiting behind the red traffic
light, a traffic object turning to the right and a further
traffic object crossing the intersection. It can be seen
that the waiting traffic objects are classified as static,
while the turning object is assigned with a ”dynamic”
state. It can also be seen that the crossing vehicle is
in a ”drifting” state, since there is no measurement
available at this frame for an association.
Dynamic Track
Initializing Track
Static Track
Drifting Track
Drifting Track
Static
Dynamic
Initializing
Figure 6: Track Management: colour-coded classification of
track maturity and dynamic classification. ”dynamic” track
(green) indicates the object is moving, ”static” track (blue)
indicates the object is stopping together with ego-vehicle,
”initializing” track (yellow) indicates the track is not yet ma-
ture since the object has just entered the sensor frame, and
”drifting” track (red) indicates the track is about to be lost
because it is entering the blind spot area.
5 BOUNDING BOX
CORRECTION
The JPDA-UKF-IMM algorithm is designed to track
the centre of the fitted bounding box, which is techni-
cally a position tracker. Since the bounding box dimen-
sions are not among the filtered states, a further step
is required in order to associate the correct geometric
features of the box. The LIDAR sensor is not able to
see the whole object in each frame due to occlusion
caused by the target object itself (i.e. self-occlusion)
or a nearby blocking object. This may lead to over-
or under-segmentation as well as dimension changes
over time. In order to tackle this problem, the result of
tracking algorithm can be used to improve the bound-
ing box fitting in three steps explained in the following
subsections.
5.1 Dimension Updating
The dimensions of bounding boxes may change due to
object occlusions or changes in observation positions
of ego vehicle as it is shown in Figure 7. A dimension
history can be integrated for monitoring the dimension
changes over time and allowing an update for mature
tracks with ”tracking” status under two main assump-
tions: 1) the bounding box is not allowed to shrink
and reduce its width and length and 2) the bounding
box is not allowed to have sudden changes in head-
ing angle or moving direction. If there are more than
one bounding boxes associated with a single track, the
one with higher association probability is taken. In a
case of equal probabilities, the one in the nearest Eu-
clidean distance is chosen. Furthermore, it is checked,
if there is an approximately same number of points in
the track and associated measurement. The dimension
information is kept and stored for the track until the
next update for each mature track.
5.2 Perspective Correction
In addition to the dimension of the bounding box,
its position has to be updated based on observation
viewing angle. For this goal, the new bounding box is
shifted with respect to nine reference points proposed
by (Schueler et al., 2012) illustrated in Figure 8 by the
green dots. The reference points describe the best seen
corner or edge and distinguish between the front, rear
and side of the target. The shifting process is done un-
der the assumption that the reference points of the old
and the new bounding box significantly overlaps. An
instance of perspective correction is shown in Figure
9.
Towards Multi-Object Detection and Tracking in Urban Scenario under Uncertainties
161
Ego
Vehicle
tk
1tk
Object 1
tk
1tk
Object 2
Object 3
Occluding
Object
Bounding Box
Center Point
Figure 7: Effect of occlusion on bounding box fitting.
x
y
Ego-vehicle
Reference point
Laser point
Figure 8: Changes in the dimension of a fitted bounding
box of the target with respect to viewing angle. The dark
points indicate the LIDAR points; the green points indicate
the reference points and red boxes show the fitted bounding
boxes.
5.3 Over- and Under-segmentation
Handling
The occlusion objects in traffic scenes especially
in urban scenarios may cause over- and under-
segmentation. This error may also be caused by clus-
tering process, where the kernel size is not adjusted
well to the current scene. In order to solve this prob-
lem, the top-down approach from (Himmelsbach and
Wuensche, 2012) is applied, where the tracking infor-
mation is re-used in clustering and box fitting. An
over-segmentation can be identified by inspecting if
the new-found clusters overlap with the predicted po-
sition of the bounding box. In case of significant over-
laps, the clusters have to be merged (c.f. Figure 10).
An under-segmentation occurs, when predicted tracks
are within one clustered region. In this case, the kernel
size of the region has to be reduced iteratively until the
correct number of expected clusters is achieved.
frame=21 full
dimension bounding
box
Front part occlusion makes
detector box shrink,
Tracker box is shifted to
bottom edge
Figure 9: Instance of perspective correction. Bounding box
of a self-occluded van located in front of ego-vehicle is
shifted downward so that the van dimension is retained.
6 EVALUATION
6.1 RAW Data and Ground Truth:
KITTI Dataset
The proposed multi-object detection and tracking al-
gorithm can be evaluated in real world scenarios by
using non-synthetic data. For this purpose, the KITTI
datasets (Geiger et al., 2013) are used. This public
benchmark provides the recordings of Velodyne HDL-
64E sensor, among other sensors in different urban
scenarios in the city of Karlsruhe, Germany. It also
includes real-world traffic situations and range from
highways over rural areas to inner-city scenes with
high-quality hand-labelled annotation.
In order to evaluate the relevant urban scenarios,
KITTI datasets within category ”City” are used. The
collection of datasets consist of 10 different driving
scenarios with the cumulative frame number of 2111
frames and 188 unique traffic objects. The composi-
tion of each dataset is represented in Table 1 and Fig-
ure 11. Note that the datasets from ”City” category
contain lots of vulnerable road users compared to other
sets and thus more representative for urban scenarios.
6.2 Benchmark Results and Discussion
The tracker performance is evaluated by using MOT16
benchmark method (Milan et al., 2016) which com-
bines the CLEAR quantitative metrics (Bernardin and
Stiefelhagen, 2008) augmented with set of Track Qual-
ity Measures (Wu and Nevatia, 2007). It is important
to note the used datasets are not uniform: the driving
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
162

Occluding
object
Over-segmented
boxes
Occluding
object
Merged Box
Figure 10: Example of over-segmentation handled by box merging.
Table 1: Evaluation Datasets.
Dataset Frame count Unique obj. No. of box
0001 106 11 142
0002 75 2 45
0005 152 14 473
0009 441 82 1413
0013 142 4 101
0017 112 5 84
0018 268 12 196
0048 20 7 81
0051 436 40 381
0057 359 12 471
Sum 2111 189 3387
scenario along with the object compositions and move-
ment types may vary significantly as dataset changes.
This is intentional as tracking methods can be heav-
ily overfitted on one particular dataset and potentially
introduce evaluation bias (Milan et al., 2016). There-
fore, the individual dataset evaluation result is a more
representative indicator to reflect the framework per-
formance. Nevertheless, it is still useful to view the
averaged score as shown in Table 1 to provide the
reader with the information about tracker overall per-
formance.
The Multi Object Tracking Accuracy (MOTA) score
reflects that the tracker has a reasonable high degree
of accuracy with a 86% overall score. The score is
lowered mainly by the number of False Negative (FN),
since the number of False Positive (FP) and ID Switch
(IDSW) are comparatively low. The Multi Object
Tracking Precision (MOTP) score is limited to 91%
D01 D02 D05 D09 D13 D17 D18 D48 D51 D57
Cyclist
1 2 1 0 0 0 0 0 2 0
Pedestrian
0 0 2 3 0 0 0 0 3 0
Van
0 0 3 0 1 0 2 1 11 1
Car
10 0 8 77 2 4 9 6 23 9
0%
25%
50%
75%
100%
Object Class Distribution
Car Van Pedestrian Cyclist
Figure 11: Distribution of object classes across all evaluation
datasets.
which is an expected result, since despite a perfect
tracking, only partial dimensional information can be
derived when an object enters the sensor frame from
a far distance; so the tracking precision would always
be low for the first few time frames.
A significant deviation across all datasets can be seen
due to datasets contain varying urban scenario. Nev-
ertheless, the average results highlight that the tracker
yield higher rate of Mostly Tracked (MT) than Mostly
Lost (ML). The recall-rate (i.e. sensitivity) and preci-
sion (i.e. positive predictive value) indicate that the
tracker hypotheses possess a high degree of relevance
to the actual object, where the lower recall rate is con-
sistent with the number of FNs counted in total. Fi-
Towards Multi-Object Detection and Tracking in Urban Scenario under Uncertainties
163

Table 2: Overall evaluation result.
(a) CLEAR Metrics
Metrics Value
MOTA 86.12% ± 6.00
MOTP 91.01% ± 5.03
FP (sum) 65
FN (sum) 406
IDSW (sum) 75
Total Obj. Instances 3387
Total Frame 2111
(b) Track Quality Measures.
Metrics Value
Mostly Tracked 70.64% ± 17.47
Mostly Lost 9.33% ± 8.10
Recall rate 88.92% ± 10.18
Precision rate 98.43% ± 2.73
Fragmentation 211
nally, the number of Fragmentation is a subset of the
FNs; here we see that more than half of FNs is caused
by track lost. Note that the lost tracks are recoverable
(i.e. not all FNs are the results of complete detection
failure across all frames). The tracking performance
(MOTP and MOTA) for individual dataset are shown
in Figure 12, the Quality Measures are shown in Fig-
ure 13, and the base metric scores are listed in Table
2.
Some datasets are discussed in details, in order to pro-
vide the reader with physical meaning of the results: In
Dataset 0005, 78% of tracks are considered to be MT,
while a relatively large number of ML tracks are avail-
able. Here the ego vehicle is moving in a curved urban
road which causes a constant change in a reference
sensor frame. Combination of self-occlusion (cf. Fig-
ure 9 for visual depiction) and a relative fast turning
rate of the target objects increases the uncertainties of
the target spatial position. Therefore, reduced tracking
accuracy and fragmentation errors can be seen in this
scenario. Dataset 0009 represents a typical complex
detection and tracking scenario: it has a large number
of frame counts with a great number of unique objects
compared to other datasets. In this dataset, the ego ve-
hicle made a 90-degree turn (i.e. a sudden change of
sensor frame) and stopped at a 4-way junction with
a persistently occluding object. The situation can be
observed in Figure 10.
Nevertheless, handling uncertainties is one of the main
contributions of this work: here we see the MOTA
score reflects that the use of JPDA filter enables the
91.61%
93.33%
89.73%
82.59%
96.04%
80.95%
79.08%
84.34%
81.36%
82.17%
94.25%
85.10%
91.87%
89.64%
97.05%
93.86%
95.22%
93.83%
88.38%
80.90%
0% 25% 50% 75% 100%
D01
D02
D05
D09
D13
D17
D18
D48
D51
D57
Multi Object Tracking Accuracy and
Precision Across All Datasets
MOTA MOTP
Figure 12: Per dataset MOTA and MOTP scores.
MT
90.91%
MT 100.00%
MT
78.57%
MT
80.49%
MT
50.00%
MT
40.00%
MT
66.67%
MT
71.43%
MT
70.00%
MT
63.64%
ML 9.09%
ML 14.29%
ML 4.88%
ML 25.00%
ML 8.33%
ML 15.00%
ML 18.18%
0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100%
D01
D02
D05
D09
D13
D17
D18
D48
D51
D57
Multi Object Tracking Quality Measure
MT ML PT
Figure 13: Per-dataset Track Quality Measures. ”PT” refers
to Partially Tracked, which is not classified as either MT or
ML.
tracker to form hypotheses with sufficient accuracy.
The results are obtained despite cluttered environment
and manoeuvring targets. Performance reduction is
found in certain scenarios (Dataset 0017 and 0051).
However, since more than 80% of the tracker hypothe-
ses are considered as MT with only 5% considered as
ML, adequate robustness against persistent- and self-
occlusion of the target objects can be found, regardless
of sensor frame change, turning cars and other occlud-
ing objects.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
164

Table 3: CLEAR comparison of state-of-art 3D LIDAR trackers.
Method MOTA MOTP FN FP
Proposed Framework 86.12 % n/a. in m 11.89 % 1.92 %
Tracking Circle (Ye et al., 2016) (averaged) 86.5% < 0.2 m 3.5% 8.0%
Energy-based (Xiao et al., 2016) 84.2 % < 0.12 m 5.8 % 2.77 %
BUTD (Xiao et al., 2016) 89.1 % < 0.16 m 2.6 % 7.6 %
Generative (Kaestner et al., 2012) 77.7 % < 0.14 m 8.5 % 10.1 %
As a summary, the benchmarking process yields a bet-
ter understanding of the tracker performance in a large
variation of urban scenarios with different classes of
traffic objects. Cars, vans and pedestrians are tracked
reliably by an average of above 86% with the proposed
framework. Quality Measures support the scores of the
CLEAR metrics: MT tracks outnumber ML tracks by
a significant margin in all datasets, including datasets
with complex scenarios. These scenarios contain con-
stant sensor frame change, persistent occluding object
and actively-manoeuvring targets. Note that we see
that the tracking accuracy and performance may de-
crease as the number of objects increases. However,
in this situation the Quality Measures indicate that the
majority of objects are still covered adequately by the
tracker.
7 COMPARISON TO
STATE-OF-THE-ART
The use of both established MOT metrics and public
datasets are also useful to enable objective comparison
to the performance of state-of-art trackers. The utilised
metrics, namely the MOTP, MOTA, MT, ML, FN and
FP are common measures for tracking performance.
Publicly ranked benchmarks (see KITTI Object Track-
ing Evaluation 2012 (Geiger et al., 2013) and 2017
MOT challenge (Leal-Taix
´
e et al., 2017)) use these
metrics, as well as numbers of MOT-related literatures
such as (Zheng et al., 2012; Bernardin and Stiefelha-
gen, 2008; Piao et al., 2016; Wen et al., 2015).
Compared to camera tracking, there is notably fewer
LIDAR literature which put significant concern on
evaluation using established metrics. Some notable
publications which use both Velodyne and CLEAR
as metrics are that of (Ye et al., 2016) which use
geometric-based tracking circle method, (Xiao et al.,
2016) which use point assignment task based on
energy function, (Spinello et al., 2011) which use
Bottom-Up Top-Down Detector (BUTD), and (Kaest-
ner et al., 2012) which use Generative Object Detec-
tion and Tracking. The comparison results can be
seen in Table 3. These works use different criteria to
compute the MOTP. Our approach takes into account
the position and dimensional integrity of the tracked
objects, thus the bounding box overlap ratio is used.
Meanwhile, these works consider only the precision
of centre point of a detected object, so the MOTP is
based on Euclidean distance error instead. In addi-
tion, only work of (Ye et al., 2016) deals with a sen-
sor mounted on a moving car; the other three use the
dataset recorded on ETH Zurich Polyterrasse, which
deals with a static reference frame in university can-
teen scenery and populated mainly with pedestrians.
While results of (Ye et al., 2016) would be the best
control comparison to this thesis work, it only uses 2
datasets with unspecified ground truth details.
A general overview indicates, that our proposed ap-
proach has a comparable accuracy (
±
3% differences)
to state-of-art, but accompanied with quite larger per-
centage of FN (11.89 % vs 2.6% with that of BUTD).
In the previous section, it has been found that a large
number of FN is contributed by the datasets with
complex scenario (mainly Dataset 0017). Neverthe-
less, if we inspect other datasets individually, the FN
rate would be on par (2-7%) with other approaches.
Therefore, a comparison with standardised datasets are
needed to give more insight, if the compared state-of-
art works exhibit a similar performance reduction in
significantly complex urban situations.
8 CONCLUSION
An integrated multi-object detection and tracking
framework has been introduced in this paper. The
framework is especially designed for the use of en-
vironment perception in the urban scenarios with the
associated uncertainties of 3D LIDAR sensor measure-
ments. However, this framework can be used for other
sensor technologies as well.
The detector is able to cope with occlusion and handle
under/over-segmentation, by receiving the additional
information from the tracker. The tracking algorithm
itself employs probabilistic data association and filter-
Towards Multi-Object Detection and Tracking in Urban Scenario under Uncertainties
165

ing based on a coupled IMM-UKF-JPDA filter, which
allows a manoeuvre-aware multi-object tracking un-
der uncertainties in a cluttered environment. More-
over, geometric properties of the tracks are updated
in a post-processing part by means of computationally
low demanding rule-based filtering and the the use of
box frame history.
Finally, the framework is evaluated with the help of es-
tablished MOT16 metrics, which shows that the track-
ing performance is favourable in a variety of pre-
recorded real-world urban scenarios. Since the frame-
work is designed and found to run in real-time (under
100 ms), we expect that our framework is applicable
for autonomous vehicles. However, the performance
of this framework can be increased in future works by
further code optimisation, applying parallel program-
ming techniques and further fitting algorithm for V
and U shape traffic objects.
REFERENCES
Bar-Shalom, Y. and Li, X. R. (1995). Multitarget-
multisensor Tracking: Principles and Techniques.
Yaakov Bar-Shalom.
Bernardin, K. and Stiefelhagen, R. (2008). Evaluating mul-
tiple object tracking performance: The CLEAR MOT
metrics. Eurasip J. Image Video Process., 2008.
Blackman, S. (2004). Multiple hypothesis tracking for multi-
ple target tracking. IEEE Aerosp. Electron. Syst. Mag.,
19(1):5–18.
Chen, T., Dai, B., Liu, D., Fu, H., Song, J., and Wei, C. (2015).
Likelihood-Field-Model-Based Vehicle Pose Estima-
tion with Velodyne. IEEE Conf. Intell. Transp. Syst.
Proceedings, ITSC, 2015-Octob:296–302.
Choi, J., Ulbrich, S., Lichte, B., and Maurer, M. (2013).
Multi-Target Tracking using a 3D-Lidar sensor for au-
tonomous vehicles. IEEE Conf. Intell. Transp. Syst.
Proceedings, ITSC, (Itsc):881–886.
Djouadi, M., Sebbagh, A., and Berkani, D. (2005). IMM-
UKF algorithm and IMM-EKF algorithm for track-
ing highly maneuverable target: a comparison. Proc.
7th WSEAS Int. Conf. Autom. Control. Model. Simul.,
pages 283–288.
Freeman, H. and Shapira, R. (1975). Determining the
minimum-area encasing rectangle for an arbitrary
closed curve. Commun. ACM, 18(7):409–413.
Gao, L., Xing, J., Ma, Z., Sha, J., and Meng, X. (2012). Im-
proved IMM algorithm for nonlinear maneuvering tar-
get tracking. Procedia Eng., 29:4117–4123.
Geiger, a., Lenz, P., Stiller, C., and Urtasun, R. (2013). Vi-
sion meets robotics: The KITTI dataset. Int. J. Rob.
Res., 32(11):1231–1237.
Genovese, A. F. (2001). The interacting multiple model
algorithm for accurate state estimation of maneuvering
targets. Johns Hopkins APL Tech. Dig. (Applied Phys.
Lab., 22(4):614–623.
Himmelsbach, M., von Hundelshausen, F., and Wuensche,
H. (2010). Fast segmentation of 3D point clouds for
ground vehicles. Iv, pages 560–565.
Himmelsbach, M. and Wuensche, H. J. (2012). Tracking and
classification of arbitrary objects with bottom-up/top-
down detection. IEEE Intell. Veh. Symp. Proc., pages
577–582.
Kaestner, R., Maye, J., Pilat, Y., and Siegwart, R. (2012).
Generative object detection and tracking in 3D range
data. 2012 IEEE Int. Conf. Robot. Autom., pages 3075–
3081.
Leal-Taix
´
e, L., Milan, A., Reid, I., Roth, S., and Schindler,
K. (2017). MOT17 Results.
Levinson et al. (2011). Towards fully autonomous driving:
Systems and algorithms. IEEE Intell. Veh. Symp. Proc.,
(Iv):163–168.
Luo, Z., Habibi, S., and Mohrenschildt, M. (2016). Li-
DAR Based Real Time Multiple Vehicle Detection and
Tracking. 10(6):1083–1090.
Milan, A., Leal-Taixe, L., Reid, I., Roth, S., and Schindler,
K. (2016). MOT16: A Benchmark for Multi-Object
Tracking. pages 1–12.
Pfaltz, J. L. (1966). Sequential Operations in Digital Picture
Processing. J. ACM, 13(4):471–494.
Piao, S., Sutjaritvorakul, T., and Berns, K. (2016). Compact
Data Association in Multiple Object Tracking: Pedes-
trian Tracking on Mobile Vehicle as Case Study. 9th
IFAC Symp. Intell. Auton. Veh., 49(15):175–180.
Rubio, D. O., Lenskiy, A., and Ryu, J. H. (2013). Connected
components for a fast and robust 2D lidar data segmen-
tation. Proc. - Asia Model. Symp. 2013 7th Asia Int.
Conf. Math. Model. Comput. Simulation, AMS 2013,
(September 2015):160–165.
Schreier, M. (2017). Bayesian environment representation,
prediction, and criticality assessment for driver assis-
tance systems. PhD thesis.
Schreier, M., Willert, V., and Adamy, J. (2016a). Compact
Representation of Dynamic Driving Environments for
ADAS by Parametric Free Space and Dynamic Object
Maps. IEEE Trans. Intell. Transp. Syst., 17(2):367–
384.
Schreier, M., Willert, V., and Adamy, J. (2016b). Compact
Representation of Dynamic Driving Environments for
ADAS by Parametric Free Space and Dynamic Object
Maps. IEEE Trans. Intell. Transp. Syst., 17(2):367–
384.
Schueler, K., Weiherer, T., Bouzouraa, M. E., and Hofmann,
U. (2012). 360 Degree multi sensor fusion for static
and dynamic obstacles. 2012 IEEE Intell. Veh. Symp.,
pages 692–697.
Spinello, L., Luber, M., and Arras, K. O. (2011). Tracking
people in 3D using a bottom-up top-down detector.
Proc. - IEEE Int. Conf. Robot. Autom., pages 1304–
1310.
Velodyne (2007). Velodyne’s HDL-64E: A High Definition
Lidar Sensor for 3-D Applications. 2007. White Pap.,
page 7.
Wang, D. Z., Posner, I., and Newman, P. (2015). Model-
free detection and tracking of dynamic objects with
2D lidar. Int. J. Rob. Res., 34(7):1039–1063.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
166

Wen, L., Du, D., Cai, Z., Lei, Z., Chang, M.-C., Qi, H., Lim,
J., Yang, M.-H., and Lyu, S. (2015). UA-DETRAC: A
New Benchmark and Protocol for Multi-Object Detec-
tion and Tracking.
Wojke, N. and Haselich, M. (2012). Moving Vehicle Detec-
tion and Tracking in Unstructured Environments. 2012
IEEE Int. Conf. Robot. Autom., pages 3082–3087.
Wu, B. and Nevatia, R. (2007). Detection and tracking of
multiple, partially occluded humans by Bayesian com-
bination of edgelet based part detectors. Int. J. Comput.
Vis., 75(2):247–266.
Xiao, W., Vallet, B., Schindler, K., and Paparoditis, N. (2016).
Simultaneous Detection and Tracking of Pedestrian
From Panoramic Laser Scanning Data. ISPRS
Ann. Photogramm. Remote Sens. Spat. Inf. Sci., III-
3(July):295–302.
Ye, Y., Fu, L., and Li, B. (2016). Object Detection and Track-
ing Using Multi-layer Laser for Autonomous Urban
Driving.
Zhang, L., Li, Q., Li, M., Mao, Q., and N
¨
uchter, A. (2011).
Multiple Vehicle-like Target Tracking Based on the
Velodyne LiDAR. (2005).
Zheng, W., Thangali, A., Sclaroff, S., and Betke, M. (2012).
Coupling detection and data association for multi-
ple object tracking. Comput. Vis. Pattern Recognit.
(CVPR), 2012 IEEE Conf., pages 1948–1955.
Towards Multi-Object Detection and Tracking in Urban Scenario under Uncertainties
167
