
A Bio-inspired Approach in Decision-making of Multiple Robots Applied
on Partitioned Surveillance Task
Bruno Massaki Emori and Rodrigo Calvo
Department of Computer Science, State University of Maringa, 5790 Colombo Avenue, 87020-900, Maringa-PR, Brazil
Keywords:
Bio-inspired Computing, Autonomous Navigation of Multiple Robots, Exploration and Surveillance of
Environment, Collective Intelligence.
Abstract:
This paper proposes a robot coordination strategy for surveillance task execution. The strategy is based on
artificial ants behavior, both for non explored regions and areas already discovered by the robots. In a strategy
already known, the robots are not capable to distinguish its own pheromone from the pheromone of the others.
In the proposed strategy, the ability to distinct the substances causes the environment’s partition. Experimental
results shows the typical behavior of each strategy applied to different environments and show the superiority
of the proposed strategy due to the environment partitioning.
1 INTRODUCTION
The use of multi-agent systems to achieve an ob-
jective can be justified by many aspects, for example:
the inviability to develop a coordination system that
involves all available and necessary resources to solve
a complex problem; the possibility to decompose the
problem into several other subproblems, which are
solved simultaneously by individual agents; and the
possibility to use agents of small complexity to per-
form simple tasks and when grouped are able to solve
a more complex problem.
The use of multiple agents is adopted in applica-
tion which the individual behavior of robots leads into
the solution as a whole. In this case, the robots act
cooperatively. Many approaches use this kind of sy-
stem in real and virtual world applications. Examples
of these applications are: surveillance tasks and moni-
toring (Krishnan, 2015), cloud computing or automa-
tion (Sun et al., 2013), scheduling problems (Adhau
et al., 2013), optimal solution search problems (Liem-
hetcharat et al., 2015), rescue (Eoh et al., 2013) and
tasks allocation (Robu et al., 2011).
Regarding the surveillance problem, some propo-
sed systems of multiple robots are based on mathema-
tical models of the environment, specifically, a graph.
In this case, the environment’s structure is known, as
well as the positioning of each robot in the scene in
any given moment (Portugal, 2013). Generally, this
model is adopted in (Fazli et al., 2013) to develop an
off-line surveillance system. Initially, strategic points
from the environment are previously defined in order
to maximize the covering area of the scene. Then,
a sequence of algorithms is executed to reduce the
graph’s size and also the trajectory established by the
robots. A model based on graphs is also adopted in
(Anisi et al., 2010). The robots’ trajectory is determi-
ned using heuristic algorithms. The authors present a
mathematical analysis and prove that the surveillance
problem is NP-complete. In (Wallar et al., 2015), air
robots perform the surveillance task.
A coordination strategy has an important role in
multi-agent systems, since it creates conditions for a
synergistic behavior to emerge. If this kind of col-
laborative behaviors exists, then the agents achieve
better results interacting with each other rather than
acting alone. Without synergisms, the system is just
a mere group of robots. In this sense, bio-inspired
approaches based on stigmergic interactions (e.g., ar-
tificial ants system) has drawn the scientific commu-
nity’s attention (Xiang and Lee, 2008).
The multiple robots system investigated here was
developed to deal with the surveillance task that dif-
fers from the techniques usually presented in the lite-
rature. In this case, the requirements that define the
task are kept (the environment must be sensed repea-
tedly and indefinitely) and other, added: the environ-
ment must be virtually partitioned in disjointed regi-
ons (sectors) of same extension in quantity equivalent
to the number of robots; and each robot must perform
the surveillance task in one of these sectors.
The proposed coordination strategy, named as Par-
Massaki Emori, B. and Calvo, R.
A Bio-inspired Approach in Decision-making of Multiple Robots Applied on Partitioned Surveillance Task.
DOI: 10.5220/0006708803110318
In Proceedings of the 20th International Conference on Enterprise Information Systems (ICEIS 2018), pages 311-318
ISBN: 978-989-758-298-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
311
titioned Surveillance System (PSS), is based on a mo-
dified artificial ants algorithm (Dorigo, 1992). The
logic presented differs from the traditional one, the
pheromone deposited by an agent has a repulsive pro-
perty. This way, the agents tend to disperse throug-
hout the environment, avoiding that two or more
agents perform the surveillance task in the same area
or in very close areas. Besides that, the strategy tends
to guide the robots into areas with no recent visitation,
due to the absence of the substance.
The strategy must partition the environment in
sectors that will be occupied by each one of the ro-
bots. The robots, individually, will be able to define
autonomously their sectors due to the adopted beha-
vior when the pheromone is detected. Hence, the
number of sectors in an environment is equal to the
number of robots. The environment’s partition favors
the surveillance task fulfillment more efficiently.
Each robot is equipped with two kinds of sensors:
one of them detects the pheromone released by the
robot itself; the second one detects the pheromone re-
leased by the other robots.
The coordination is not dependent of the parame-
ters that define an environment and no information
about the position and direction of the robots. Experi-
ments performed in different scenarios shows a gene-
ral behavior of the robots, consisting in two phases:
first, the robots develop a dispersion behavior, and
then, each agent defines a restrictive sector to cover
and sensor. Lastly, o system reaches a stability stage.
In this instant, the surveillance task is performed fol-
lowing the desired requirements: the environment is
totally and repeatedly sensed and virtually partitioned
into small disjointed sectors, which each one is moni-
tored by a robot.
The paper is structured as it follows. The proposed
strategy is described in Section 2 as well as the models
of the sensors used. In Section 3, the experiments and
discussion about the obtained results in simulations
are presented. Main contributions, relevant aspects
and future works are presented in Section 4.
2 PARTITIONED
SURVEILLANCE SYSTEM
The PSS strategy was developed to deal with explo-
ration and surveillance tasks of unknown environ-
ments, according to the principles of the ants algo-
rithm (Dorigo, 1992). Essentially, the system is based
on multiple mobile agents able to take decisions of
movement adjustment, individually, according to the
stimuli from the environment.
The mentioned tasks are performed due to the
robot’s ability to deposit a substance, named phero-
mone, on the environment, to mark the regions which
they visited (or monitored). This substance has a
repulsive feature, i.e, the robots tend to avoid areas
with pheromone concentration. That behavior cau-
ses the robots spreading out in the environment. Alt-
hough the robots deposit only one kind of pheromone,
each one is able to distinguish its pheromone, (own
pheromone) from the one deposited by the others (odd
pheromone).
The proposed strategy is distributed, reactive and
independent of the parameters usually considered in
multiple agent systems: environment structure and di-
mension, number of robots and robots’ position. The
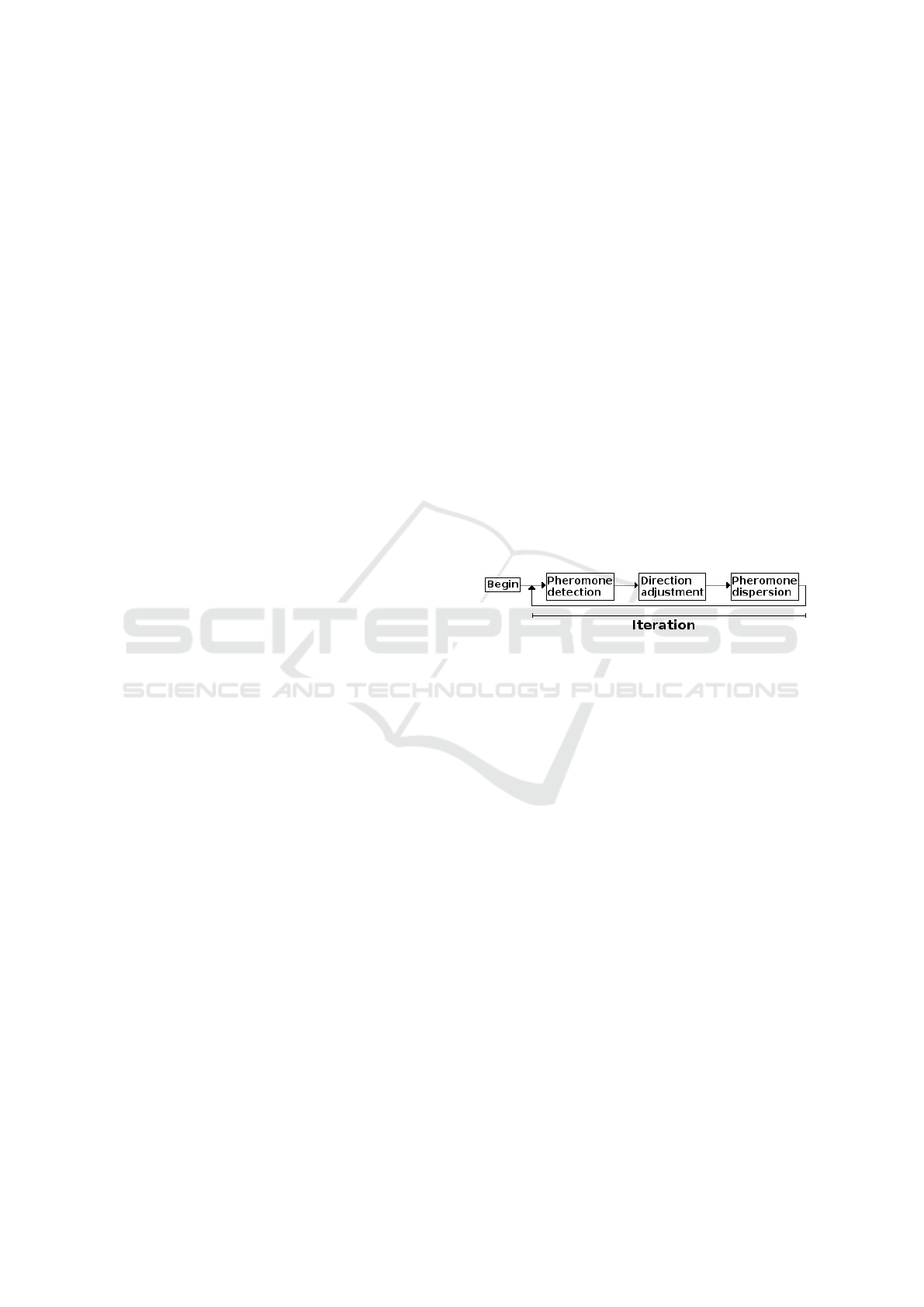
robots play a sequence of actions (Figure 1) in order
to execute the surveillance task, they are: pheromone
dispersion, pheromone detection and direction adjus-
tment. That sequence determines an iteration to exe-
cute the surveillance task. For all actions of the se-
quence, the robots keep a constant speed. The robot’s
angular speed is changed according to the external sti-
muli detected by the sensors. Each action is described
in next sections.
Figure 1: Task diagram for one robot.
2.1 Robot and Sensors Models
The robots are equipped with two types of phero-
mone sensors. One of them allows the detection of its
own pheromone and the other detects only odd phero-
mone. Both of them has the same physical structure.
Consider the index s, s ∈ {own,odd}, refers to the
pheromone sensors, own and odd, respectively. The
sensor field is a sector of a circle C
s
defined accor-
ding to a radius R
s
centralized on the robot’s frontal
part. The sensors covers an area of β
s
degrees from
the left to β
s
degrees from the right of the robot’s mo-
vement direction, β
s
∈ [0
◦
,180
◦
] (Figure 2). The total
cover area of 2β
s
degrees is divided in identical circu-
lar sectors C
s
i
, each one measuring α
s
degrees.
Every iteration, the pheromone sensors detect a set
of stimuli from the environment at a specific and pa-
rameterizable distance. The detection only occurs at
the boundary of the sensors (detection limit).
The robots also possess a proximity sensor. Its
model is similar to the pheromone sensors. At each
iteration, this sensor detects, in each circular sector,
a set of stimuli corresponding to the distance of ob-
stacles. The amount of pheromone accumulated close
to obstacles generates not attractive areas for robots.
ICEIS 2018 - 20th International Conference on Enterprise Information Systems
312
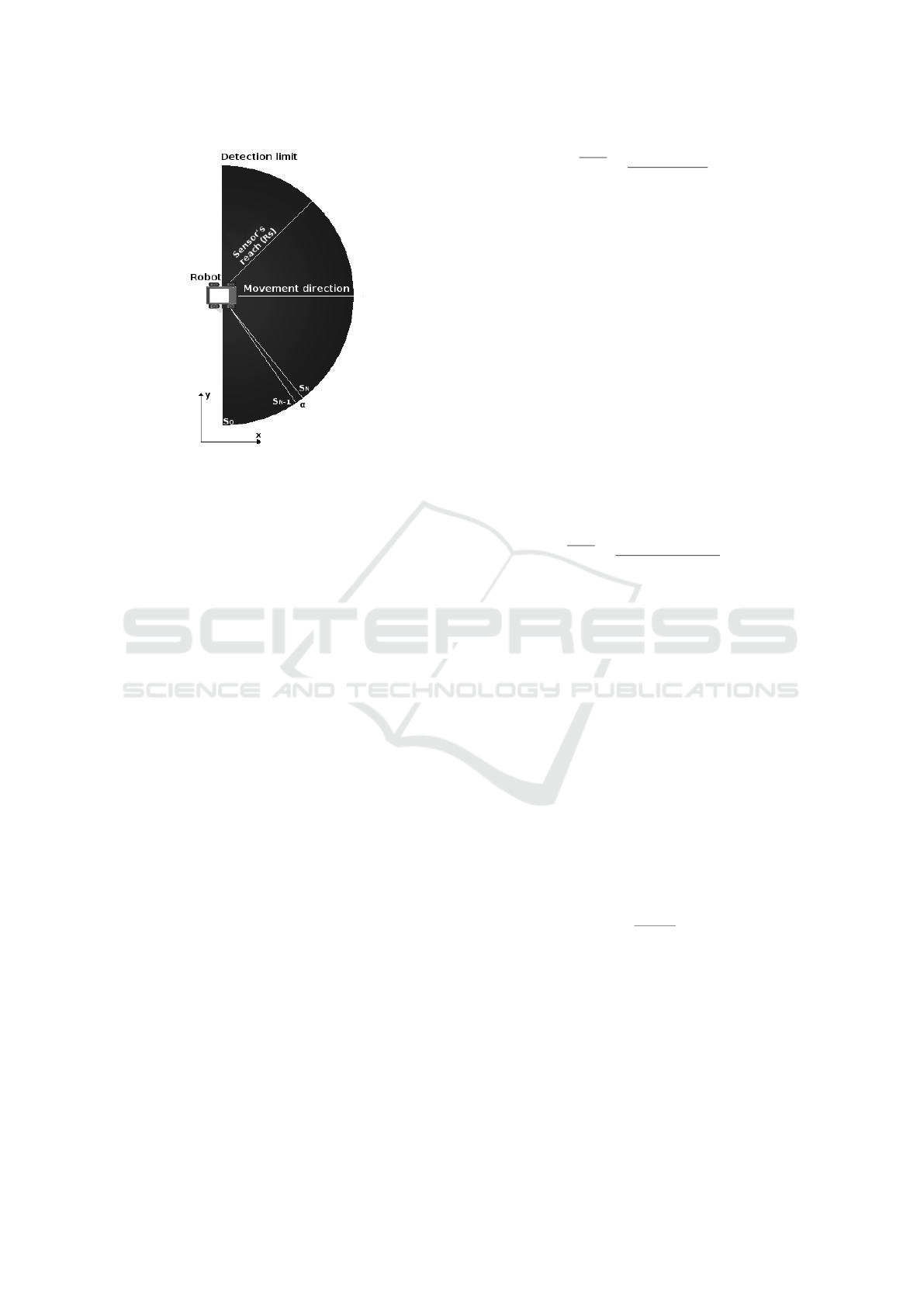
Figure 2: Robot’s sensor model.
Then, the pheromone releasing is enough to robots
guide over safe trajectories. However, a specific al-
gorithm for obstacle avoidance is triggered at instant
that robots face imminent collision situations (for ex-
ample, if the distance between the obstacle and the
robot is too low). That algorithm is activated rarely
due to robot’s dimensions.
2.2 Direction Adjustment Mechanism
To determine the direction angle, it is proposed a me-
chanism that combines the information obtained by
the pheromone sensors. Consider a set P of circular
sectors C
r
, in which the i−th element of the set corre-
sponds to the quantity of own and odd pheromone of
the i−th circular sector. From this set, only the sectors
with odd pheromone quantity lower than ψ, ψ > 0 are
selected and inserted to the set Q. From this selection,
it is possible to achieve two scenarios:
1) If the quantity of elements in Q is smaller than
η, then the robot is located in an area with high con-
centration of odd pheromone. In this case, the own
pheromone becomes attractive (only for this robot),
in order to maintain the robot on its own area and
not monitor areas visited by the others. Therefore,
the content of Q is removed and the elements of P
with the highest quantity of own pheromone are in-
serted in Q until its size is equal to half of P’s size. A
probabilistic value is attributed to each circular sector
C
r
in P directly proportional to the quantity of own
pheromone deposited on the respective angular inter-
val. Specifically, a probability P(r) attributed to the
circular sector C
r
is:
P(r) =
τ
r
∑
i∈{r|C
r
∈Q}
(τ
i
)
(1)
where τ
r
is the quantity of pheromone correspondent
to the circular sector C
r
.
2) If the quantity of elements in Q is higher than
η, it means there is low or none quantity of odd phero-
mone surrounding the robot. So, these areas have
been for a long time without visits (or never have been
visited yet). The advance of a robot into areas that are
not of its domain is only possible if the own phero-
mone remains repulsive. Hence, priority is given to
the exploration behavior. This way, elements in Q
with quantity of own pheromone higher than ψ are
removed from the set in such a way that the length
of Q will be reduced by up to half. Similarly to the
previous scenario, a probabilistic value is attributed
to each circular sector, however, inversely proporti-
onal to the quantity of own pheromone deposited in
the respective angular interval. The probability P(r)
is given as:
P(r) =
1 − τ
r
∑
i∈{r|A
r
∈Q}
(1 − τ
i
)
(2)
2.3 Pheromone Dispersion and
Evaporation
The pheromone is dispersed on a wide frontal area
of the robot, corresponding to the area covered by
the sensors. The amount of pheromone released in
a position changes according to the distance between
the position and the agent. Up next, the model of
pheromone releasing is described. Consider L
t
and
Q the coverage area of the sensor in iteration t and the
complete space of the environment, respectively, such
that L(t) ⊂ Q ⊂ R
2
. The concentration of pheromone
∆
k
q
(t) which the k−th robot deposits on the position
q ∈ Q in iteration t is given as:
∆
k
q
(t) = (τ
max
− τ
q
(t − 1))Γ
k
q
(t), and (3)
Γ
k
q
(t) =
(
δ e
−(q−q
k
)
2
λ
2
,if q ∈ L
k
t
0,otherwise
(4)
where q
k
is the position of the k−th robot; τ
max
is
the maximum limit of saturation of pheromone’s con-
centration; λ is the dispersion rate of pheromone; and
δ ∈ (0,1).
The pheromone is a volatile substance. Hence,
it evaporates at the end of each iteration, i.e, when
all robots complete a cycle of tasks. The amount of
evaporated pheromone, given by the equation (5) de-
pends on the specific rate, a parameterizable constant
A Bio-inspired Approach in Decision-making of Multiple Robots Applied on Partitioned Surveillance Task
313

and the amount of pheromone on the area at the given
instant.
ε
q
(t) = φτ
q
(t) (5)
where ε, 0 ≤ ε ≤ 1, is the evaporation rate and τ
q
(t)
is the total amount of pheromone on the position q in
the instant t.
3 EXPERIMENTAL RESULTS
This section presents the experiments to validate the
proposed strategy (PSS). The results are analyzed and
compared with a coordination strategy already known
with results proved in previous researches for the
exploration task and surveillance of unknown envi-
ronments, called in this paper as traditional strategy
(Calvo et al., 2015; Calvo et al., 2012). The perfor-
mance of the PSS strategy is satisfactory if it is simi-
lar or superior than the performance of the traditional
strategy. The surveillance task is executed if the entire
of the environment are sensed.
The platform Morse Simulator is used to execute
the experiments. The model adopted for the robots
is the ATRV, equipped with the sensor SICK LMS
500. For both strategies, was adopted the following
parameters: (s ∈ {own,odd}); R
s
= 10m; β
s
= 90
◦
;
γ = 0.4; robots’ linear speed = 0.5m/s; S = 360;
φ = 0.01; τ
q
(0) = 0.5 (quantity of pheromone at ite-
ration t = 0 for each q ∈ Q). These parameters were
defined according to the numerous tests executed pre-
viously.
The experiments are performed in environments
with dimensions of 80×50m (Figure 3). The environ-
ments are divided in connected regions called rooms.
Each one of them are divided in small squared areas
called cells. The cells are portions of the environment
used to check if the entire of the environment is sen-
sed. At instant when robots visit all cells at least once,
then it is said that a cycle of surveillance was comple-
ted. After that, a new cycle os surveillance is started.
Two criteria of evaluation are adopted to the experi-
ments: number of cycles of surveillance completed
through the simulation and the average of iterations
between two consecutive completed cycles. Each si-
mulation is executed 30 times with 2000 iterations.
The PSS strategy is validated by means of the ana-
lysis of its performance when compared to the traditi-
onal strategy. The maps correspond to the simulation
whose performance is closer to the average perfor-
mance obtained in the simulations. Next, is presented
the performance of each strategy of coordination.
(a)
(b)
Figure 3: Environment models: (a) #1; (b) #2.
3.1 Traditional Strategy
In the traditional strategy, the direction adjustment
occurs differently from the PSS strategy. Here, the ro-
bots do not distinguish the types of pheromones. Only
one kind of pheromone is detected, and it has only the
repulsive property. The direction adjustment is also
based on a probabilistic model, but the best circular
sectors to be chosen are those which have low phero-
mone. Others sectors are chosen randomly to favor
the exploratory behavior in the environment. In this
strategy, the robots tend to monitor areas with low or
none pheromone quantity, regardless of the agent that
deposited it.
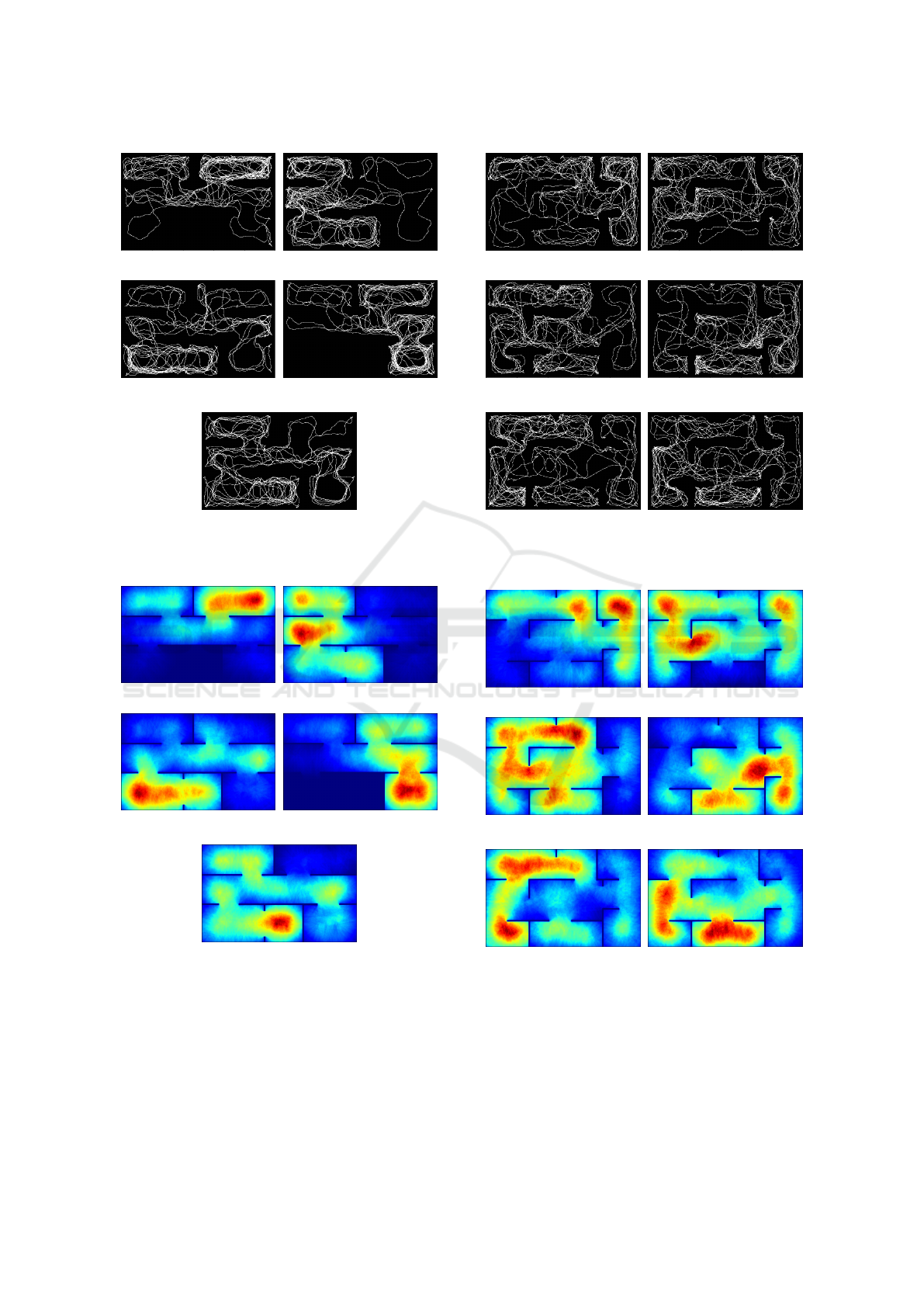
Considering the environment #1 (Figure 3(a)), the
traditional strategy is performed, using five robots, all
of them starting on the room of number 1. In 30 simu-
lations, the robots completed an average of 20.5 cy-
cles (standard deviation of 1.1670), with an average
of 95.28 iterations per cycle (standard deviation of
5.2373). The Figures 4 and 5 show the trajectory and
the average of pheromone deposited on the environ-
ment for each robot, respectively.
Note that, in Figure 4, the robots traveled throug-
hout the environment, each one occupying, practi-
cally, all rooms on a same simulation. The Figure
5 shows the average of pheromone deposited by the
robots in one simulation. This information indicates
the most visited areas by the robots and that the robots
were too close to each other. The occurrence of this
situation leads to the waste of resources like sensor
and traveled path. The concentration of close robots
also causes the increase of time in which a room re-
ICEIS 2018 - 20th International Conference on Enterprise Information Systems
314
(a) Robot 1 (b) Robot 2
(c) Robot 3 (d) Robot 4
(e) Robot 5
Figure 4: Trajectory of the robots on the environment #1
using the traditional strategy.
(a) Robot 1 (b) Robot 2
(c) Robot 3 (d) Robot 4
(e) Robot 5
Figure 5: Average of pheromone dispersion on the environ-
ment #1 using the traditional strategy.
mains unvisited.
For the environment #2 (Figure 3(b)), six robots
are employed. All of them started on the room of
number 1. The average amount of surveillance cy-
cles completed was of 26.16 (standard deviation of
1.7827), with an average of 74.81 iterations per cy-
(a) Robot 1 (b) Robot 2
(c) Robot 3 (d) Robot 4
(e) Robot 5 (f) Robot 6
Figure 6: Trajectory of the robots on the environment #2
using the traditional strategy.
(a) Robot 1 (b) Robot 2
(c) Robot 3 (d) Robot 4
(e) Robot 5 (f) Robot 6
Figure 7: Average of pheromone dispersion on the environ-
ment #2 using the traditional strategy.
cle (standard deviation of 4.6290). Similarly to the
previous experiment, the robots are dispersed throug-
hout the environment, alternating the visits among the
rooms. The Figure 6 shows that the robots occu-
pied all rooms. According to the Figure 7, it can be
A Bio-inspired Approach in Decision-making of Multiple Robots Applied on Partitioned Surveillance Task
315
seen that many robots remained on the same rooms,
in most part of the simulation, indicating proximity
with each other. This means that another rooms of the
scene remained without visits for a long period.
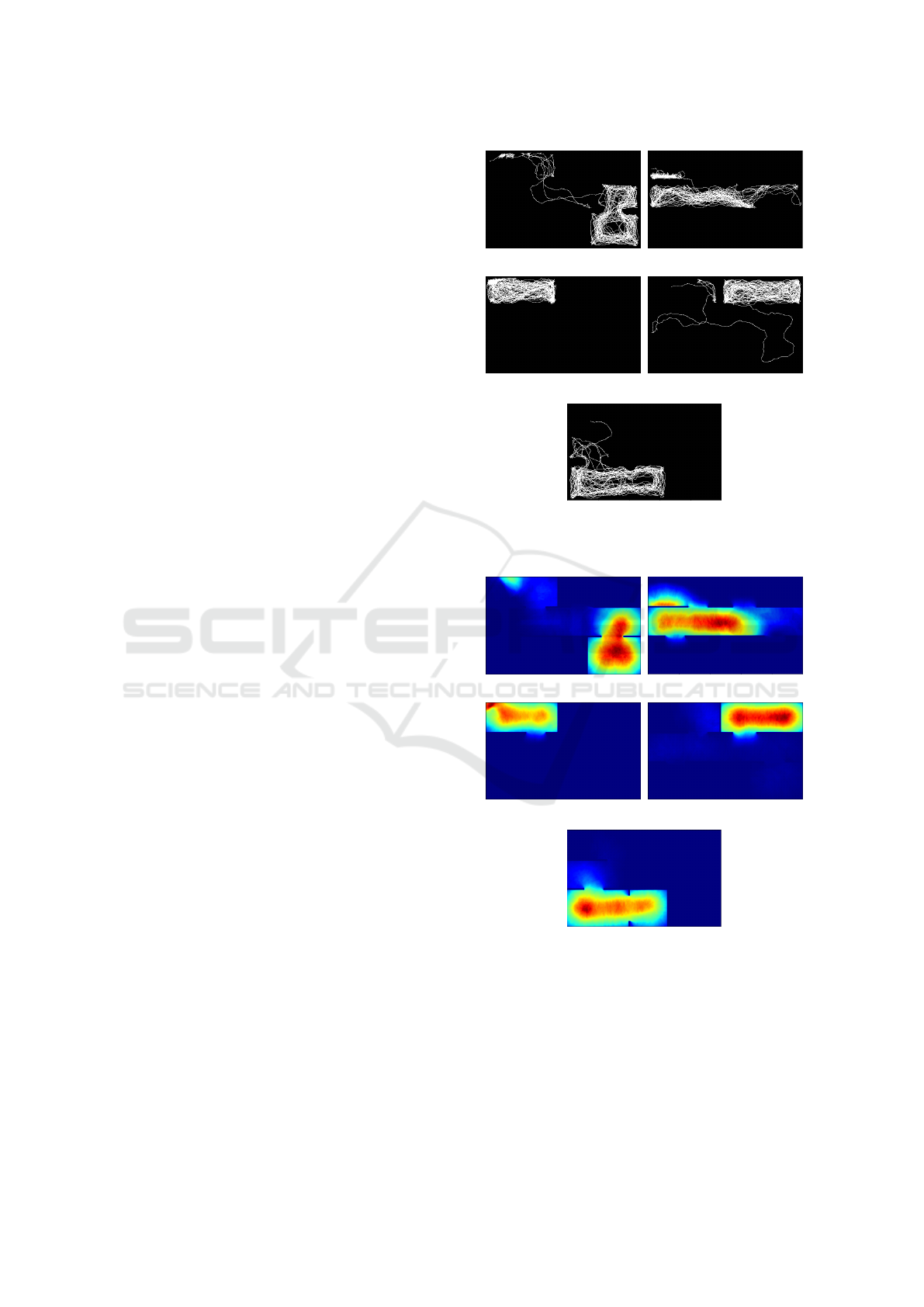
3.2 Partitioned Strategy
The robots’ behavior on the partitioned strategy con-
sists of the dispersion throughout the environment in
a way that the monitored region by a robot do not get
occupied by any other robot. After a period in which
each robot is on a region, it is said that the strategy sta-
bilized itself. At this instant, the robots defined their
own partition on the environment. The following ex-
periments show this behavior.
For the environment #1, five robots are used, star-
ting on the room number 1. The number of completed
surveillance cycles is, on average, 26.36 (standard de-
viation of 2.5795), with an average of 75.23 iterations
per cycle (standard deviation of 7.5414). Compared
to the traditional strategy, the partitioned strategy in-
creased about 28.59% the number of average comple-
ted cycles. This is due to the better surveillance task
distribution among the robots.
The Figures 8 and 9 show the environment’s par-
tition, where each robot remains on its own area indi-
vidually.
On the environment #2, for six robots starting on
room number 1, the average of completed cycles was
31.83 (standard deviation of 3.0522), with an average
of 62.59 (standard deviation of 5.7205) iterations per
cycle, an increase of 21.67% of number of completed
cycles. Figures 10 and 11 show that, even in a diffe-
rent environment , the strategy’s behavior still keeps
the map partitioned among the agents.
The Tables 1 and 2 summarize the results for both
experiments. The S.D. column stands for standard de-
viation of its previous column.
The main reason for the better performance of the
PSS strategy is highly tied to the partition of the en-
vironment whose partitions are occupied by only one
robot. The presence of odd pheromone avoid a robot
move to occupied partition. That behavior induces a
robot stay in areas with its own pheromone, i.e, areas
where that the robot visited recently.
If each robot patrols its own partition, there will
not redundancy of covered areas, improving the per-
formance of the surveillance task. Therefore, the exe-
cution of the task is distributive and more effective
than the strategy where the robots do not able to split
virtually the environment in small partitions.
(a) Robot 1 (b) Robot 2
(c) Robot 3 (d) Robot 4
(e) Robot 5
Figure 8: Trajectory of the robots on the environment #1
using the partitioned strategy.
(a) Robot 1 (b) Robot 2
(c) Robot 3 (d) Robot 4
(e) Robot 5
Figure 9: Average of pheromone dispersion on the environ-
ment #1 using the partitioned strategy.
4 CONCLUSIONS
The PSS strategy presented a higher performance than
the traditional strategy. The fundamental feature of
this strategy consists on the ability to partition the
ICEIS 2018 - 20th International Conference on Enterprise Information Systems
316
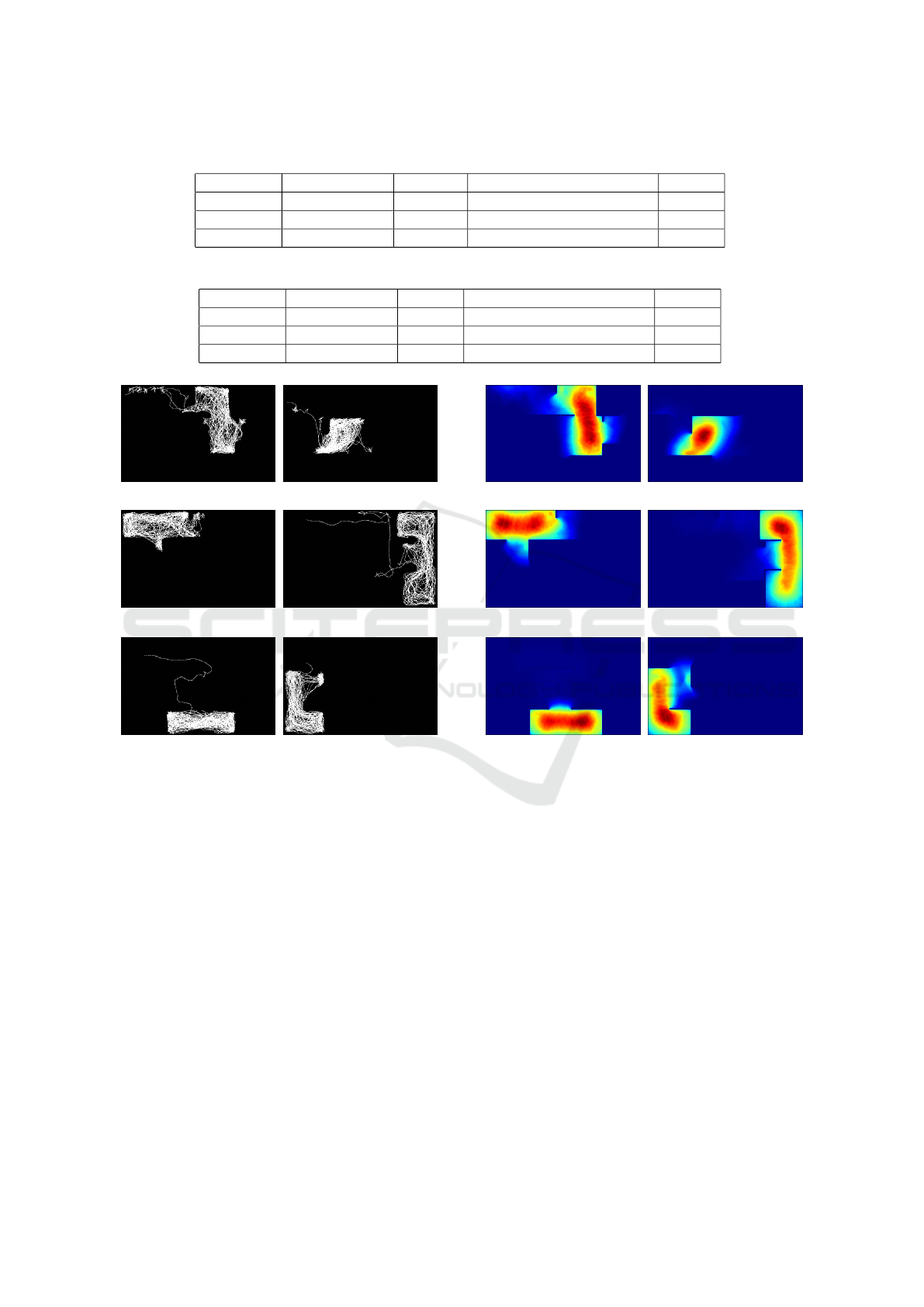
Table 1: Results of the experiments on environment. #1.
Strategy Average cycles S.D. Average iterations per cycle S.D.
Traditional 20,5 1,1670 95,28 5,2373
Partitioned 26,36 2,5795 75,23 7,5414
Increase 28,59% 121,04% -21.04% 43,99%
Table 2: Results of the experiments on environment. #2.
Strategy Average cycles S.D. Average iterations per cycle S.D.
Traditional 26.16 1,7827 74.81 4.6290
Partitioned 31.83 3.0522 62.59 5.7205
Increase 21,67% 71,21% -16.33% 23,58%
(a) Robot 1 (b) Robot 2
(c) Robot 3 (d) Robot 4
(e) Robot 5 (f) Robot 5
Figure 10: Trajectory of the robots on the environment #1
using the partitioned strategy.
scene autonomously into smaller sectors, in which
just one robot remains on the sector, performing the
surveillance task. The fact that a robot does not in-
vade other’s areas avoids the redundant monitoring of
the same region, distributing the surveillance equally
on the environment.
As future works, it is intended to verify the influ-
ence of the pheromone evaporation and dispersion ra-
tes on the number of robots and the dimensions of the
environment. Investigate the behavior of the agents
with scenes without obstacles and develop a strategy
for this scenario that can simulate, for example, a dis-
tribution task of a mobile phone operator’s antennas.
Also it is intended to make feasible the PSS strategy
on real robots, along with mapping and location algo-
rithms needed for the surveillance task.
(a) Robot 1 (b) Robot 2
(c) Robot 3 (d) Robot 4
(e) Robot 5 (f) Robot 5
Figure 11: Average of pheromone dispersion on the envi-
ronment #1 using the partitioned strategy.
REFERENCES
Adhau, S., Mittal, M., and Mittal, A. (2013). A multi-
agent system for decentralized multi-project schedu-
ling with resource transfers. International Journal of
Production Economics, 146(2):646 – 661.
Anisi, D. A., Ogren, P., and Hu, X. (2010). Coopera-
tive minimum time surveillance with multiple ground
vehicles. IEEE Transactions on Automatic Control,
55(12):2679–2691.
Calvo, R., Constantino, A., and Figueiredo, M. (2015). A
multi-pheromone stigmergic distributed robot coordi-
nation strategy for fast surveillance task execution in
unknown environments. In Neural Networks (IJCNN),
2015 International Joint Conference on, pages 1–8.
Calvo, R., de Oliveira, J., Figueiredo, M., and Francelin Ro-
mero, R. (2012). A bioinspired coordination strategy
A Bio-inspired Approach in Decision-making of Multiple Robots Applied on Partitioned Surveillance Task
317

for controlling of multiple robots in surveillance tasks.
In International Journal on Advances in Software, vo-
lume 5, pages 146–165. IARIA.
Dorigo, M. (1992). Optimization, Learning and Natural
Algorithms. PhD thesis, Politecnico di Milano, Italy.
Eoh, G., Choi, J. S., and Lee, B. H. (2013). Faulty
robot rescue by multi-robot cooperation. Robotica,
31(8):12391249.
Fazli, P., Davoodi, A., and Mackworth, A. K. (2013). Multi-
robot repeated area coverage. Autonomous Robots,
34(4):251–276.
Krishnan, D. (2015). A distributed self-adaptive intrusion
detection system for mobile ad-hoc networks using
tamper evident mobile agents. Procedia Computer
Science, 46:1203 – 1208. Proceedings of the Inter-
national Conference on Information and Communica-
tion Technologies, ICICT 2014, 3-5 December 2014
at Bolgatty Palace & Island Resort, Kochi, India.
Liemhetcharat, S., Yan, R., Tee, K. P., and Lee, M. (2015).
Multi-robot item delivery and foraging: Two sides of
a coin. Robotics, 4(3):365–397.
Robu, V., Noot, H., Poutr, H. L., and van Schijndel, W.-
J. (2011). A multi-agent platform for auction-based
allocation of loads in transportation logistics. Expert
Systems with Applications, 38(4):3483 – 3491.
Sun, Q., Yu, W., Kochurov, N., Hao, Q., and Hu, F. (2013).
A multi-agent-based intelligent sensor and actuator
network design for smart house and home automation.
Journal of Sensor and Actuator Networks, 2(3):557–
588.
Wallar, A., Plaku, E., and Sofge, D. A. (2015). Reactive
motion planning for unmanned aerial surveillance of
risk-sensitive areas. IEEE Transactions on Automa-
tion Science and Engineering, 12(3):969–980.
Xiang, W. and Lee, H. (2008). Ant colony intelligence
in multi-agent dynamic manufacturing scheduling.
Engineering Applications of Artificial Intelligence,
21(1):73 – 85.
ICEIS 2018 - 20th International Conference on Enterprise Information Systems
318
