
A Rover-based System for Searching Encrypted Targets in
Unknown Environments
Danilo Avola
1
, Luigi Cinque
2
, Gian Luca Foresti
1
, Marco Raoul Marini
2
and Daniele Pannone
2
1
Department of Mathematics, Computer Science and Physics, University of Udine, Via delle Scienze 206, Udine, Italy
2
Department of Computer Science, Sapienza University, Via Salaria 113, Rome, Italy
Keywords:
Visual Cryptography, Target Recognition, Rover, Client-Server System.
Abstract:
In the last decade, there has been a widespread use of autonomous robots in several application fields, such as
border controls, precision agriculture, and military operations. Usually, in the latter, there is the need to encrypt
the acquired data, or to mark as relevant some positions or areas. In this paper, we present a client-server rover-
based system able to search encrypted targets within an unknown environment. The system uses a rover to
explore an unknown environment through a Simultaneous Localization And Mapping (SLAM) algorithm and
acquires the scene with a standard RGB camera. Then, by using visual cryptography, it is possible to encrypt
the acquired RGB data and to send it to a server, which decrypts the data and checks if it contains a target
object. The experiments performed on several objects show the effectiveness of the proposed system.
1 INTRODUCTION
In recent years, autonomous robots such as rovers,
Autonomous Underwater Vehicles (AUVs), and Un-
manned Aerial Vehicles (UAVs) are used in a wide
range of application fields, including Search and Res-
cue (SAR) operations (Cacace et al., 2016; Kiyani and
Khan, 2016), environment monitoring (Avola et al.,
2017b; Avola et al., 2017a), and military operations
(Kaur and Kumar, 2015). In these missions, these
robots can be used to substitute the human operators.
For example, rovers can climb impervious grounds
and grab potentially unreachable objects. Drones can
provide strategical images from precise altitudes and
angles of view. The underwater cave exploration case
is even more explicative: usually there is no oxygen,
light, and space for moving. These examples show
the importance of using robots in specific conditions.
Moreover, different sensors can be attached to these
devices, thus allowing to collect sound, temperature,
and other types of data. Due to this fact, sensible in-
formation can be obtained and it could be necessary to
hide them for security or privacy reasons. For exam-
ple, in military operations it is critical to protect data
from enemies, civilians, or other potential intruders.
Usually, in these operations, the most used type of
data are images, which are dense source of informa-
tion and difficult to crypt. The focus of this work is
on this specific topic.
In this paper, a client-server rover-based system
able to search an encrypted target in an unknown en-
vironment is presented. The system works in the fol-
lowing way. Firstly, by using visual cryptography
technique two shares from a target image are gener-
ated and stored in the server. Then, the rover starts
the environment exploration through a SLAM algo-
rithm, and acquires the scene through an RGB cam-
era. To hide the frames sent by the rover to the server,
the frames are encrypted, again, by using visual cryp-
tography. Then, on the server side, the shares received
are used in conjunction with the shares extracted from
the target image such that the decryption can be per-
formed.
The paper is structured as follows. In Section 2,
current state-of-the-art works regarding SLAM and
visual cryptography are discussed. In Section 3, the
system architecture and the proposed visual cryptog-
raphy pipeline are shown. Section 4 presents the ex-
periments performed and the results obtained. Finally,
Section 5 concludes the paper.
2 RELATED WORK
Visual Cryptography is a technique used to encrypt
an image by splitting it into n images called shares.
These latter do not allow to distinguish any informa-
254
Avola, D., Cinque, L., Foresti, G., Marini, M. and Pannone, D.
A Rover-based System for Searching Encrypted Targets in Unknown Environments.
DOI: 10.5220/0006723402540261
In Proceedings of the 7th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2018), pages 254-261
ISBN: 978-989-758-276-9
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Architecture of the proposed system.
tion about the original image unless they are com-
bined together. This means that if only one share
is available, the source data is inaccessible. This
cryptography approach has been introduced by Naor
and Shamir (Naor and Shamir, 1995). Their method
has never been heavily modified and still no one has
proposed a completely different visual cryptography
approach, but only variants and improvements (Liu
et al., 2014). Some developments for grayscale (Lin
and Tsai, 2003; Babu et al., 2013) and RGB images
(Hou, 2003; Liu et al., 2008) have been proposed for
providing an easier integration of visual cryptography
in real applicative contexts. Moreover, also combina-
tions of them have been considered for improving per-
formances (Stinson, 1997; Shyu, 2006) in cyphering.
Since in visual cryptography the image resulting from
the algorithm is decrypted by the human eye, some
techniques to enhance the quality of the decrypted
image have been proposed. In particular, the most
used technique is the dithering (Alex and Anbarasi,
2011; Pahuja and Kasana, 2017), which allows to cre-
ate halftone images. In addition, visual cryptography
is also used as enhancement of traditional protection
schemes (Yang et al., 2017; Kadhim and Mohamed,
2016; Joseph and R, 2015).
Concerning the environment exploration, the cur-
rent state-of-the-art is based on the SLAM (Leonard
and Durrant-Whyte, 1991; Sim and Roy, 2005; Trivun
et al., 2015) approach. The aim of the SLAM is
to maximize the area coverage during the environ-
ment exploration and, at the same time, to make the
robot conscious of its absolute position within it. The
SLAM approach can be used with several sensors,
such as depth/time of flight cameras (Li et al., 2016;
Walas et al., 2016), thermal cameras (Chen et al.,
2017), or a fusion of them (Mur-Artal and Tards,
2017; Camurri et al., 2015). In addition, it is used
for different tasks, such as mosaicking generation (Bu
et al., 2016), pipe rehabilitation (Kim et al., 2015),
and environment mapping (Balclar et al., 2017).
3 SYSTEM ARCHITECTURE
AND PROPOSED PIPELINE
In this section, both the system architecture and the
proposed method are described. In particular, the
client-server approach is explained and the visual
cryptography pipeline is described.
3.1 System Architecture
In Figure 1, the architecture of the proposed system is
shown. The system is composed by a client side, i.e.,
the rover, and the server side, i.e., a computer. The
proposed system has been developed starting from the
one presented in (Avola et al., 2016) by implementing
new features.
In the server side, the first step consists in storing
the information regarding the target image. By using
the visual cryptography, two shares, i.e., S
1
and S
2
,
A Rover-based System for Searching Encrypted Targets in Unknown Environments
255

are extracted from the target image I. Using a public
key cryptography approach we store only one share
in the server, i.e., S
1
, considering it as a private key,
while S
2
is discarded.
In the client side, the SLAM algorithm is exe-
cuted, through which the rover explores the environ-
ment in search of the target image used for generating
the original shares. During the exploration, the rover
acquires the scene with a standard RGB camera. On
the images acquired with the latter, the visual cryp-
tography algorithm is applied to the frames in order
to generate two shares, i.e., S
3
and S
4
. Of these two
shares, only S
4
is sent to the server and it is used as a
public key, so in conjunction with S
1
it is possible to
decrypt the image.
The advantage of using shares instead of clear im-
ages is that if an intruder performs an attack, both
physical (e.g., steals the rover) or digital (e.g., sniffing
of the video stream) the attacker cannot retrieve to the
original information (i.e., the target image). More-
over, with this approach it is possible to use objects
of the environment as markers, thus allowing to dis-
tinguish, for example, an area or an object of inter-
est. This is possible since the target image will be
decrypted only with the correct shares, so if an image
is correctly decrypted we known that we are facing
the object of interest or we are in the correct position
within the environment.
3.2 Proposed System Pipeline
In this section, the proposed method for generating
shares and reconstructing the original information is
explained. As in the pipeline described in (Hou,
2003), the first step in creating the shares consists in
applying the dithering algorithm to the target image I.
The dither is a form of noise intentionally applied in
order to reduce the quantization error. With the dither-
ing step, the image is converted into an approximate
binary image so that the encryption and decryption
processes are easier. There are several dithering algo-
rithms:
• Average dithering (Boiangiu et al., 2012) is one of
the simplest techniques. It consists in calculating
the middle tone of each area and assigning this
value to that portion of image;
• Floyd-Steinberg (Knuth, 1987) is still the most
used, it consists in diffusing the quantization er-
ror to the near pixels of each pixel of the image;
• Average ordered dithering (Bayer, 1973) is simi-
lar to average dithering but generates cross-hatch
patterns;
Figure 2: Example of halftones obtained by applying dither-
ing algorithm on the three image channels.
• Halftone dithering (Knuth, 1987) looks similar to
newspaper halftone prints and produces clusters
of pixel areas;
• Jarvis dithering (Jarvis et al., 1976) is similar to
Floyd-Steinberg but distributes the quantization
error farther than it, increasing computational cost
and time.
Due to its easiness of implementation and its good
quality results, the used dithering algorithm is the
Floyd-Steinberg. As mentioned, the algorithm dif-
fuses the quantization error of a pixel to the neighbour
pixels, and it is done in the following way:
0 0 0
0 p
7
16
3
16
5
16
1
16
(1)
where the pixel p is the current pixel scanned dur-
ing the execution of the algorithm. Since I is scanned
from left to right and from top to bottom, the pixels
are quantized only once. Considering that we are us-
ing color images, the dithering algorithm is applied
on the three channels of the image, obtaining three
halftone images. In Figure 2, the result of this step is
shown.
The second step is the generation of the shares
from the halftone image. As starting point, we show
how shares are generated from a grayscale image
since the same algorithm will be applied on the color
image. The algorithm is the following:
1. Image I is tranformed into a black and white
halftone image H.
2. For each pixel in the halftone image, a random
combination is chosen among those depicted in
Figure 3.
3. Repeat step 2 until every pixel in H is decom-
posed.
The pseudocode is reported in Algorithm 1. For
generating the shares from a color image, we have
applied the third method proposed in (Hou, 2003).
This method has been chosen since despite a color
image is used, it requires only two shares to recon-
struct the original image, and it does not sacrifice too
much image contrast for color visual cryptography.
The method works in the following way. The im-
age I is transformed in three halftone images, one for
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
256

Algorithm 1: Algorithm generating shares from a grayscale
image.
1: procedure SHARESFROMGRAY(grayImage)
2: Transform grayImage to halftone image H
3: for each pixel in H do
4: Choose randomly a share among those in
5: Figure 3
6: end for
7: end procedure
Figure 3: Sharing and stacking combination in grayscale
images visual cryptography.
Cyan (C), one for Magenta (M) and one for Yellow
(Y). Subsequently, for each halftone image the Algo-
rithm 1 is used to generate six 2 × 2 sharing images,
called C1, C2, M1, M2, Y1 and Y2. Each of these
images have two white pixels and two color pixels.
Then, C1, M1 and Y1 are combined to generate the
colored Share 1, while C2, M2 and Y2 are combined
to generate the colored Share 2. The color intensity
of the share blocks is a value between 0 and 1, where
0 means the absence of that color and 1 means full
intensity. So, for a pixel p
i, j
the color intensity for
each channel is defined as (I
C
, I
M
, I
Y
). For each block
generated with this method, we have that the color
intensity is (
1
2
,
1
2
,
1
2
), while after stacking Shares 1
and Shares 2 the range of color intensity is between
(
1
2
,
1
2
,
1
2
) and (1, 1, 1). The decryption step simply
consists in overlapping the two shares, obtaining the
decrypted image I
dec
. In Figure 4 a representation of
the algorithm is depicted, while in Algorithm 2 the
pseudocode of the method is shown.
Since the image acquired by rover could not be ac-
quired at the same distance, position and angulation of
the original target image I, and the pixels composing
the two shares must be almost perfectly aligned in or-
der to perform the decryption, a morphing procedure
is applied on S
4
. This allows to optimize, in some
cases, the alignment of the two shares. Since with the
Figure 4: Decomposition and reconstruction of color pixel.
Algorithm 2: Algorithm generating shares from a color im-
age.
1: procedure SHARESFROMCOLOR(colorImage)
2: Transform colorImage in three halftone im-
ages C, M and Y
3: for each pixel p
i, j
in C,M and Y do
4: According to Algorithm 1, create
5: C1
i, j
, C2
i, j
, M1
i, j
, M2
i, j
, Y 1
i, j
, Y 2
i, j
6: Combine C1
i, j
, M1
i, j
and Y 1
i, j
for the
7: corresponding block of Share 1
8: Combine C2
i, j
, M2
i, j
and Y 2
i, j
for the
9: corresponding block of Share 2
10: end for
11: After stacking the two Shares,
12: the original image can be decrypted.
13: end procedure
shares a feature-based (e.g., by using keypoints and
homography) alignment cannot be performed due to
their random pixel arrangement, we have defined 8
standard transformations to apply. In Figure 5, these
transformations are shown.
Figure 5: Transformations applied to S
4
for optimizing the
shares overlap.
After the generation of I
dec
, it must be checked
that it is a valid decrypted image. In order to do so,
A Rover-based System for Searching Encrypted Targets in Unknown Environments
257
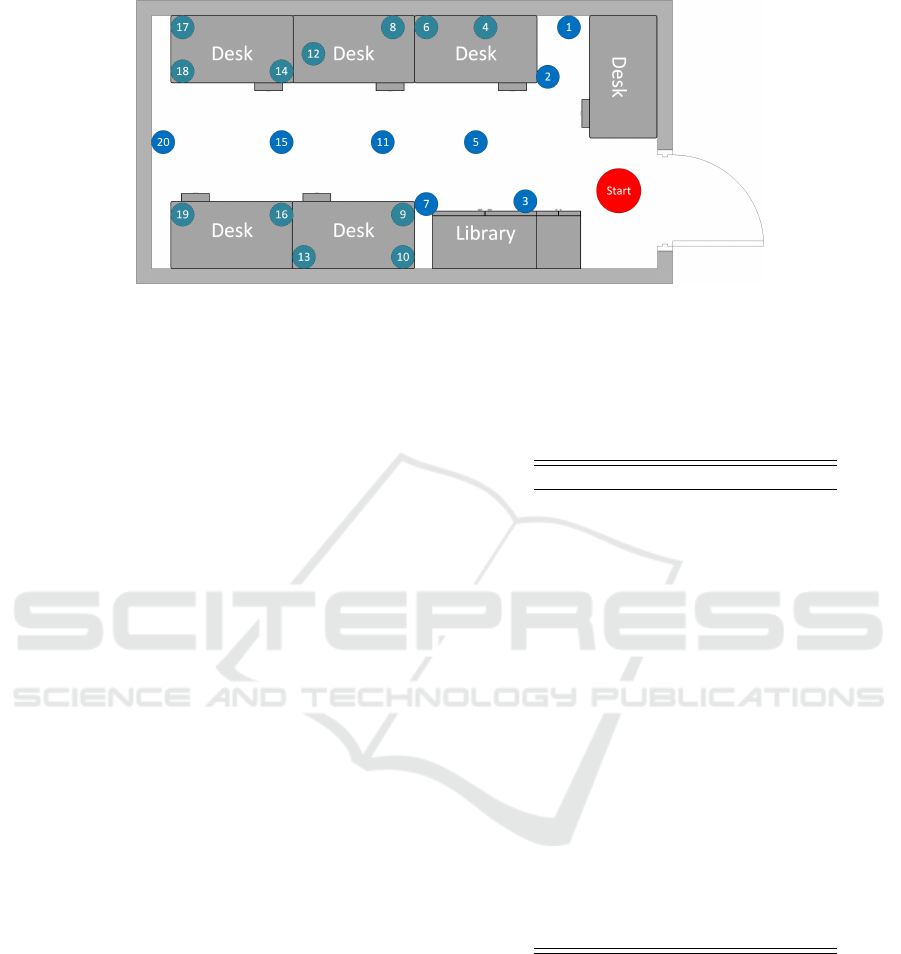
Figure 6: The testing environment. The red circle is the rover starting point, the dark blue circles are uncovered the target
objects, while the dashed light green circles are the target underneath the desks.
we computed the difference between the standard de-
viation of I
dec
and its smoothed copy. The smoothing
operation has been performed by using a median filter
with kernel size of 3 × 3. If I
dec
is a valid decrypted
image, we have that the standard deviation between
it and its smoothed copy is low (e.g., less than 10),
otherwise higher values are obtained.
The generation of the shares is performed once for
I and once per second on the video acquired by the
rover. The last assumption is due two main factors:
a) the dithering operation cannot be performed in real
time, and b) the used rover has not enough computa-
tional power to perform the dithering at higher rate.
4 EXPERIMENTS AND
DISCUSSION
In this section, the performed experiments are dis-
cussed. In detail, we report the correctness in decrypt-
ing shares and the time needed to find the target ob-
jects within the testing environment. Since there is no
dataset for visual cryptography, all the experiments
have been performed with our acquisitions. More-
over, the experiments have been performed in con-
trolled conditions, without changes of light (which
can affect the share generation) and moving objects
(which can affect the performances of SLAM algo-
rithm). In Figure 6, the environment used for the ex-
periments is depicted, which has dimensions of about
2.5 ×6 meters. In the performed tests, the rover starts
the recognition always from the same starting point.
To test the reliability of the system, we used both clear
(i.e., just placed on the ground) and covered (i.e., un-
derneath the desks) objects. A total of 20 objects have
been used, of which 8 uncovered and 12 covered. In
Table 1, the objects used in the experiments are re-
ported. To test exhaustively the system, objects with
high variability of colours and sizes have been cho-
sen.
Table 1: List of objects used during the experiments.
Object Number Object Type
Object 1 Ball
Object 2 Toy Gun
Object 3 USB Keyboard
Object 4 Pen
Object 5 Calculator
Object 6 Pencil
Object 7 Paperweight
Object 8 Credit card
Object 9 Sponge
Object 10 USB mouse
Object 11 Cup
Object 12 Coffe Machine
Object 13 Wallet
Object 14 Plastic Bottle
Object 15 Monitor
Object 16 Toy Robot
Object 17 DVD Case
Object 18 Small Box
Object 19 Big Box
Object 20 Book
In Figure 7, the rover used for the experiments is
shown. The rover is composed by an Arduino UNO
microcontroller, which handles both the servomotors
and the ultrasonic sensor used by the SLAM algo-
rithm, and by a Raspberry Pi 2 model B, which han-
dles the camera and the video stream. Despite the
used rover is able to perform all the tasks required
(i.e., SLAM algorithm and sending the video stream
to the server), its computational power affects the time
needed to explore the environment. The first experi-
ments have been done by testing the entire system on
the rover. After capturing the frame, the Raspberry
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
258

Table 2: Standard deviations confusion matrix of the shares experiments.
Object 1 Object 2 Object 3 Object 4 Object 5 Object 6 Object 7 Object 8 Object 9 Object 10 Object 11 Object 12 Object 13 Object 14 Object 15 Object 16 Object 17 Object 18 Object 19 Object 20
Object 1 4.9792 24.2623 21.1189 21.6967 24.7812 19.2538 24.8378 20.1352 23.0027 22.5186 23.0507 21.1661 22.7217 23.8669 19.1155 19.5032 24.8488 22.9081 20.3874 21.4209
Object 2 19.7321 4.5369 20.5471 20.9900 19.9134 21.0880 19.7300 24.3049 19.5657 24.5802 21.3941 19.2844 21.0542 23.4158 23.7681 22.2694 23.1173 24.3618 19.3288 20.8220
Object 3 19.2771 20.1729 5.4403 23.3305 24.2668 22.4946 19.4241 24.5365 23.8022 20.7157 22.2620 24.9087 23.2941 24.0338 21.5996 21.8237 22.3643 20.6145 23.4941 22.0233
Object 4 22.8809 20.8465 19.8323 4.9511 21.1748 23.7287 23.6818 23.0111 19.8010 19.1293 22.3590 20.8049 24.6365 24.8854 20.7197 23.8049 24.3767 22.5852 24.3041 24.6624
Object 5 22.2949 23.3703 22.4605 19.1551 4.8931 22.8778 22.1272 21.2339 24.6228 23.9772 24.0945 21.2352 22.5591 24.2353 24.6010 23.0108 20.2407 22.9231 19.4323 21.4404
Object 6 23.0016 24.6024 23.8657 21.9073 23.5405 4.8341 24.8307 24.9278 24.1849 21.3333 21.7285 20.4801 23.7065 24.2970 24.4823 22.3497 22.5932 19.8933 24.3983 21.7024
Object 7 20.2340 24.3979 23.5755 24.2949 20.7097 23.0394 5.3286 19.7369 21.4439 20.6517 23.3000 20.7003 24.3772 23.9595 21.3402 21.9874 23.1688 24.0062 22.6578 22.4484
Object 8 20.9563 21.7385 23.2828 24.3064 23.3251 19.1117 23.0487 18.7589 21.6269 19.7022 23.8881 20.9491 20.4774 21.0563 21.2542 22.2793 22.3715 21.3749 21.3888 22.0922
Object 9 22.9452 24.7055 23.3341 21.4005 23.9912 19.8060 19.3628 19.5055 19.2645 20.9453 20.8104 19.0701 22.2394 19.5722 19.8791 22.7868 24.1559 24.8453 22.4250 24.9811
Object 10 22.3212 22.0928 20.9841 21.5800 21.9508 19.4262 24.3264 19.3878 21.6171 5.6533 21.3672 22.6808 23.9118 24.3174 24.5867 20.1447 20.5515 24.3872 22.5602 22.0230
Object 11 22.6769 23.9165 22.1913 20.2125 21.7234 21.5675 24.7963 22.7203 23.1723 23.3210 4.6938 22.1019 22.3402 19.9390 22.3723 23.1688 21.5587 24.0176 23.3883 21.1602
Object 12 21.7253 21.3183 23.6533 23.4056 21.5817 23.1625 24.6713 23.7054 23.2334 19.6560 21.3396 5.1818 21.7563 19.3020 20.3721 24.0051 19.0939 24.1823 19.4684 23.0143
Object 13 22.0013 20.3080 22.4297 19.7331 23.0270 22.5975 19.3359 19.3381 19.9150 19.1177 21.6111 23.9933 5.2348 22.1208 24.1832 19.5862 24.4483 19.6481 22.1020 19.8589
Object 14 22.3562 19.0275 23.6001 24.0923 24.5009 24.9218 22.0308 20.6285 19.6045 22.0471 22.5137 23.5773 19.4978 5.3232 22.1019 20.0263 24.6313 22.5429 21.6438 24.6515
Object 15 22.9355 21.7117 24.0382 22.1957 22.3233 23.0804 21.2031 20.4357 22.4735 24.2013 21.4407 19.6757 21.6631 20.8011 4.8028 24.0002 21.4218 21.3411 21.1627 19.8415
Object 16 20.5608 19.5209 21.5764 20.5437 20.7853 21.5492 19.7152 21.9704 23.2384 20.4614 23.7104 19.4445 21.3633 19.0204 20.3241 4.0026 20.1351 19.8549 20.6085 20.0494
Object 171 19.8319 22.5933 24.4063 24.6363 20.3271 21.8960 21.2561 22.1427 20.5892 19.4101 21.6180 20.0431 19.1566 24.7281 21.5836 24.7694 5.5248 19.0441 23.0802 23.2357
Object 18 22.8708 22.3139 20.3087 23.6342 20.3682 21.2252 24.3456 24.1383 21.4146 20.9081 22.6518 24.4612 24.4546 22.5496 20.9954 24.1184 21.6544 5.8087 19.1991 22.1946
Object 19 23.2990 20.0758 21.0192 20.1263 20.9316 21.4231 22.2914 19.2924 22.3164 20.6489 20.4490 20.4589 19.9250 24.7385 24.6140 23.9123 23.3696 20.0549 4.7207 20.1327
Object 20 19.0072 20.8985 23.1977 22.7515 22.2584 21.6342 20.7246 22.0100 23.5693 23.5744 22.4563 23.4860 22.8732 19.7393 22.0264 21.0836 19.5529 19.8871 20.1890 19.8832
Figure 7: The rover used for the experiments.
Pi 2 proceeds with the pipeline described in Section
3. Due to the low power of the embedded processor,
it takes about 20 seconds for each frame for complet-
ing the entire pipeline. To overcome this problem, the
client-server approach has been adopted for improv-
ing the performance. In fact, the embedded system
has only to compute the share of the frame and to
send it with POST request over Wi-Fi to a directly-
connected (ad-hoc network) machine, the server. The
rest of computation is given to this latter. The total
time has been reduced to around 5 seconds per frame.
Concerning the accuracy of shares decryption, Table
2 shows the confusion matrix of the standard devia-
tions obtained from the experiments. In our exper-
iments, we have found that a correct decrypted im-
age has a standard deviation value between 4 and 6,
while a wrong decrypted image has a standard devi-
ation value between 19 and 25. It is possible to ob-
serve that the decryption step works generally well,
but due to their characteristics the decryption fails for
the credit card (Figure 8(a)), the sponge (Figure 8(b))
and the cup (Figure 8(c)). In detail, the decryption
fails because even if we apply the transformation de-
picted in Figure 5, it may be not sufficient to correctly
align the shares.
Regarding the execution time, the rover took about
30 to 45 minutes to explore the entire environment.
This is due to the random approach of the used SLAM
algorithm, and also due to the fact that for this kind
rover the exploration under the desks may be tricky.
Since at the current state-of-the-art there are no
Figure 8: Object with which the decryption process fails: a)
a credit card, b) a sponge and c) a cup.
works exploiting visual cryptography and SLAM al-
gorithms to search targets in unknown environments,
the only comparisons that can be made with those
works are with the single functionalities of the pro-
posed system. In Table 3, these comparisons are
shown.
Since the proposed system makes use of both vi-
sual cryptography and SLAM algorithms, it takes the
benefits from both. Of course, there are some im-
provements that can be done. A first improvement
could be the design of a more robust share alignment
method instead of using fixed transformation. An-
other improvement could be the use of a more pow-
erful (but more expensive) rover, in order to integrate
sensors such as time of flight cameras allowing the
use of a faster SLAM algorithm.
5 CONCLUSIONS
In recent years, autonomous robots are used in several
fields due to their capacity to scour dangerous and dif-
ficult to reach areas of interest. Usually, these robots
send the acquired data to a ground station in order to
perform elaborations on it, and in some cases there is
the need to hide the information sent. In this paper,
a rover-based system able to search encrypted targets
in an unknown environment is presented. The system
exploits two well-known approaches for achieving the
goal. The first approach is the SLAM, which is used
to explore the unknown environment. The second ap-
proach is the visual cryptography, which is used to
decrypt the target object and to send encrypted video
frames. The experimental results shown that the pro-
posed pipeline works quite well in a controlled exper-
A Rover-based System for Searching Encrypted Targets in Unknown Environments
259

Table 3: Functionality comparison between the proposed system and the state-of-the-art-works.
Type of Algorithm Information Encryption/Decryption Target Search Sensors Moving System
Pahuja et al. (Pahuja and Kasana, 2017) Visual Cryptography Yes No N/A No
Alex et al. (Alex and Anbarasi, 2011) Visual Cryptography Yes No N/A No
Balclar et al. (Balclar et al., 2017) SLAM No No RGBD Camera + laser range finder Yes
Li et al. (Li et al., 2016) SLAM No No RGBD Camera Yes
Walas et al. (Walas et al., 2016) SLAM No No RGBD Camera + time of flight camera Yes
Proposed System Visual Cryptography + SLAM Yes Yes RGB Camera + Ultrasonic Sensors Yes
imental environment.
REFERENCES
Alex, N. S. and Anbarasi, L. J. (2011). Enhanced image
secret sharing via error diffusion in halftone visual
cryptography. In 2011 3rd International Conference
on Electronics Computer Technology, volume 2, pages
393–397.
Avola, D., Foresti, G. L., Cinque, L., Massaroni, C., Vi-
tale, G., and Lombardi, L. (2016). A multipurpose au-
tonomous robot for target recognition in unknown en-
vironments. In 2016 IEEE 14th International Confer-
ence on Industrial Informatics (INDIN), pages 766–
771.
Avola, D., Foresti, G. L., Martinel, N., Micheloni, C., Pan-
none, D., and Piciarelli, C. (2017a). Aerial video
surveillance system for small-scale uav environment
monitoring. In 2017 14th IEEE International Con-
ference on Advanced Video and Signal Based Surveil-
lance (AVSS), pages 1–6.
Avola, D., Foresti, G. L., Martinel, N., Micheloni, C., Pan-
none, D., and Piciarelli, C. (2017b). Real-Time In-
cremental and Geo-Referenced Mosaicking by Small-
Scale UAVs, pages 694–705. Springer International
Publishing, Cham.
Babu, R., Sridhar, M., and Babu, B. R. (2013). Information
hiding in gray scale images using pseudo-randomized
visual cryptography algorithm for visual information
security. In 2013 International Conference on Infor-
mation Systems and Computer Networks, pages 195–
199.
Balclar, M., Yavuz, S., Amasyal, M. F., Uslu, E., and ak-
mak, F. (2017). R-slam: Resilient localization and
mapping in challenging environments. Robotics and
Autonomous Systems, 87(Supplement C):66 – 80.
Bayer, B. E. (1973). An optimum method for two-level ren-
dition of continuous-tone pictures. In IEEE Int. Conf.
on Communications, volume 26, pages 11–15.
Boiangiu, C.-A., Bucur, I., and Tigora, A. (2012). The im-
age binarization problem revisited: Perspectives and
approaches. Journal of Information Systems & Oper-
ations Management, 6(2):1.
Bu, S., Zhao, Y., Wan, G., and Liu, Z. (2016). Map2dfusion:
Real-time incremental uav image mosaicing based on
monocular slam. In 2016 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 4564–4571.
Cacace, J., Finzi, A., Lippiello, V., Furci, M., Mimmo, N.,
and Marconi, L. (2016). A control architecture for
multiple drones operated via multimodal interaction
in search rescue mission. In 2016 IEEE International
Symposium on Safety, Security, and Rescue Robotics
(SSRR), pages 233–239.
Camurri, M., Bazeille, S., Caldwell, D. G., and Semini, C.
(2015). Real-time depth and inertial fusion for local
slam on dynamic legged robots. In 2015 IEEE Inter-
national Conference on Multisensor Fusion and Inte-
gration for Intelligent Systems (MFI), pages 259–264.
Chen, L., Sun, L., Yang, T., Fan, L., Huang, K., and
Xuanyuan, Z. (2017). Rgb-t slam: A flexible slam
framework by combining appearance and thermal in-
formation. In 2017 IEEE International Conference on
Robotics and Automation (ICRA), pages 5682–5687.
Hou, Y.-C. (2003). Visual cryptography for color images.
Pattern Recognition, 36(7):1619 – 1629.
Jarvis, J. F., Judice, C. N., and Ninke, W. (1976). A sur-
vey of techniques for the display of continuous tone
pictures on bilevel displays. Computer Graphics and
Image Processing, 5(1):13–40.
Joseph, S. K. and R, R. (2015). Random grid based visual
cryptography using a common share. In 2015 Interna-
tional Conference on Computing and Network Com-
munications (CoCoNet), pages 656–662.
Kadhim, A. and Mohamed, R. M. (2016). Visual cryptog-
raphy for image depend on rsa algamal algorithms. In
2016 Al-Sadeq International Conference on Multidis-
ciplinary in IT and Communication Science and Ap-
plications (AIC-MITCSA), pages 1–6.
Kaur, T. and Kumar, D. (2015). Wireless multifunctional
robot for military applications. In 2015 2nd Interna-
tional Conference on Recent Advances in Engineering
Computational Sciences (RAECS), pages 1–5.
Kim, D. Y., Kim, J., Kim, I., and Jun, S. (2015). Artificial
landmark for vision-based slam of water pipe rehabili-
tation robot. In 2015 12th International Conference on
Ubiquitous Robots and Ambient Intelligence (URAI),
pages 444–446.
Kiyani, M. N. and Khan, M. U. M. (2016). A prototype
of search and rescue robot. In 2016 2nd Interna-
tional Conference on Robotics and Artificial Intelli-
gence (ICRAI), pages 208–213.
Knuth, D. E. (1987). Digital halftones by dot diffusion.
ACM Transactions on Graphics (TOG), 6(4):245–273.
Leonard, J. J. and Durrant-Whyte, H. F. (1991). Simultane-
ous map building and localization for an autonomous
mobile robot. In Intelligent Robots and Systems
’91. ’Intelligence for Mechanical Systems, Proceed-
ings IROS ’91. IEEE/RSJ International Workshop on,
pages 1442–1447 vol.3.
Li, C., Wei, H., and Lan, T. (2016). Research and imple-
mentation of 3d slam algorithm based on kinect depth
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
260

sensor. In 2016 9th International Congress on Image
and Signal Processing, BioMedical Engineering and
Informatics (CISP-BMEI), pages 1070–1074.
Lin, C.-C. and Tsai, W.-H. (2003). Visual cryptography
for gray-level images by dithering techniques. Pattern
Recognition Letters, 24(1):349 – 358.
Liu, F., Wu, C. K., and Lin, X. J. (2008). Colour vi-
sual cryptography schemes. IET Information Security,
2(4):151–165.
Liu, S., Fujiyoshi, M., and Kiya, H. (2014). A cheat
preventing method with efficient pixel expansion for
naor-shamir’s visual cryptography. In 2014 IEEE In-
ternational Conference on Image Processing (ICIP),
pages 5527–5531.
Mur-Artal, R. and Tards, J. D. (2017). Orb-slam2: An
open-source slam system for monocular, stereo, and
rgb-d cameras. IEEE Transactions on Robotics,
33(5):1255–1262.
Naor, M. and Shamir, A. (1995). Visual cryptography,
pages 1–12. Springer Berlin Heidelberg, Berlin, Hei-
delberg.
Pahuja, S. and Kasana, S. S. (2017). Halftone visual cryp-
tography for color images. In 2017 International Con-
ference on Computer, Communications and Electron-
ics (Comptelix), pages 281–285.
Shyu, S. J. (2006). Efficient visual secret sharing scheme for
color images. Pattern Recognition, 39(5):866–880.
Sim, R. and Roy, N. (2005). Global a-optimal robot explo-
ration in slam. In Proceedings of the 2005 IEEE In-
ternational Conference on Robotics and Automation,
pages 661–666.
Stinson, D. (1997). An introduction to visual cryptography.
Public Key Solutions, 97:28–30.
Trivun, D., alaka, E., Osmankovi, D., Velagi, J., and
Osmi, N. (2015). Active slam-based algorithm for
autonomous exploration with mobile robot. In 2015
IEEE International Conference on Industrial Technol-
ogy (ICIT), pages 74–79.
Walas, K., Nowicki, M., Ferstl, D., and Skrzypczyski, P.
(2016). Depth data fusion for simultaneous localiza-
tion and mapping - rgb-dd slam. In 2016 IEEE Inter-
national Conference on Multisensor Fusion and Inte-
gration for Intelligent Systems (MFI), pages 9–14.
Yang, D., Doh, I., and Chae, K. (2017). Enhanced password
processing scheme based on visual cryptography and
ocr. In 2017 International Conference on Information
Networking (ICOIN), pages 254–258.
A Rover-based System for Searching Encrypted Targets in Unknown Environments
261
