
Mobile Agents for Robot Control based on PSO
Koji Oda
1
, Munehiro Takimoto
2
and Yasushi Kambayashi
1
1
Department of Computer and Information Engineering, Nippon Institute of Technology,
4-1 Gakuendai, Miyashiro-machi, Minamisaitama-gun, Saitama 345-8510, Japan
2
Department of Information Sciences, Tokyo University of Science, 2641 Yamazaki, Noda 278-8510, Japan
Keywords: Mobile Agent, Python, Multi-robot, Particle Swarm Optimization.
Abstract: It is a fundamental concern for the robot research community to explore unknown environments. This paper
presents an approach for controlling multi-cooperative robot exploration in an unknown environment. In order
to control multiple robots, we take advantage of multiple mobile agents. In this paper, we report our
experience in implementing a mobile multi-agent system written in Python 2. We chose Python because it is
easy to read and write, and has a rich library. To construct an efficient search algorithm for multiple mobile
robots, we employ an extended particle swarm optimization (PSO) for the robot control algorithm. This
algorithm allows robots to avoid obstacles while utilizing the PSO as a basic search algorithm. To demonstrate
the feasibility of this research, we implemented an agent platform in Python 2, along with a team of mobile
robots controlled by a team of mobile agents on this platform. The imaginary application is a search and
rescue operation after disaster in an urban area. We believe that the combination of mobile agents and mobile
robots contributes lifesaving applications.
1 INTRODUCTION
During the last two decades, robotic systems have
made rapid progress, not only in their behaviors but
also in the way they in which they are controlled. In
particular, a control system based on multiple
software agents can be used in controlling robots in
an efficient manner (Mondada et al., 2004);
(Kambayashi and Takimoto, 2005); (Parker, 2008).
We have conducted research projects that have
taken advantage of multiple mobile agents. These
projects include evacuation route generation at the
time of a disaster using multiple mobile agents, and
searching for victims after a disaster (Nagata et al.,
2013). These two studies have one commonality,
namely, building a multi-agent system in a distributed
environment. As a result of these studies, we have
shown that an efficient resource search is achieved
through communication among multiple mobile
agents.
We have continued applying mobile agents to
other researches. Studies using particle swarm
optimization (PSO) as a search algorithm are also
being conducted using multiple robots (Zhou et al.,
2011). Such researches have applied multiple robots
as particles of PSO. However, there are problems in
using PSO for searching in disaster fields. For
example, because the PSO algorithm does not
recognize the existence of an obstacle within the
search range, we extended the PSO for our research
in order to solve this problem. This algorithm
cooperates with other robots conducting a search, and
performs actions to avoid various obstacles. A
simulation was also carried out.
Certainly, robots that perform tasks such as
exploration and photography have contributed to
disaster relief in recent years. However, because
many of those robots are manipulated by human
beings using wired connections, if problems such as
a disconnection of the connection lines occur, the
robot will go missing. We are especially concerning
a case where noxious or radioactive circumstance.
Therefore, we are developing an autonomous search
robot that does not require human control. Therefore,
it is possible for a robot team to operate in a field too
dangerous for human beings. In addition, we do not
have to worry about a loss of communication.
However, because a command is issued before the
search is started, a flexible operation based on human
judgment is not reflected. The mobile agent system
enables us to send any algorithms or intelligence
required by intelligent search robots by sending
mobile agents after the robots are dispatched.
Oda, K., Takimoto, M. and Kambayashi, Y.
Mobile Agents for Robot Control based on PSO.
DOI: 10.5220/0006727303090317
In Proceedings of the 10th International Conference on Agents and Artificial Intelligence (ICAART 2018) - Volume 1, pages 309-317
ISBN: 978-989-758-275-2
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
309
Such a control algorithm of an autonomous search
robot is difficult without using a mobile software
agent.
We have accumulated experience on various
simulators. In an environment such as a disaster area,
however, we cannot expect stable communication in
a real situation. In addition, it is unknown how long it
will actually take to communicate between the search
robots, or the time required to reach the target search
object, unless the control algorithm is developed to
work on actual machines.
A new question arises when considering the
operation on an actual machine. This is a question of
what type of method should be used to share data.
In this study, we have constructed a mobile
software agent system written in Python 2 that is
dedicated to operation on a small computer applied in
a robot. We report the effectiveness of the system in
human search and rescue under difficult
circumstances using PSO and extended PSO.
The structure of the balance of this paper is as
follows. In the second section, we describe the
background. In the third section, we describe our
mobile sofware agents implemented in Python 2 and
how the agents control multiple robots in a search
field. The fourth section discusses the problems we
have to overcome in order to construct a practical
search robot team that can operate in a real disaster
field, and finally, in the fifth section, we provide some
concluding remarks.
2 BACKGROUND
Thus far, a number of studies on the use of agents
have been conducted (Stone et al., 2000)
(Kambayashi and Takimoto, 2005); (Avilés et al.,
2014); (Shibata et al., 2014); (Kambayashi et al.,
2016); (Taga et al., 2016, 2017). Among them, we are
focusing particularly on mobile agents. We have
constructed a multi-agent system and have been
conducting research on resource searches and
evacuation route generation. The technologies used in
this research are introduced below.
2.1 Mobile Agent
A mobile agent is a program that contitues processing
while moving between computing sites. A mobile
agent can autonomously choose the destination to
which it migrate. As an example application of a
mobile agent, we can imagine multiple resource-
searching robots controlled using mobile software
agents.
Autonomous search robots occasionally search
unnecessary areas. This means that they consume
energy unnecessarily. In order to mitigate this
problem, we introduce mobile agents that allow
multiple robots to share information between them.
We can also use mobile agents to issue instructions to
control multiple robots during a particular action. As
a result, a more efficient search for resources can be
accomplished. Using this feature, Taga et al., (2016;
2017) proposed a method for deriving a return home
route after a disaster using a mobile agent.
2.2 Particle Swarm Optimization
PSO is an optimization algorithm using swarm
intelligence proposed by Kennedy and Eberhart
(1995). It is based on the behavior of insects and
schooling fish and is an algorithm imitating the habit
of gathering at locations where there is a high
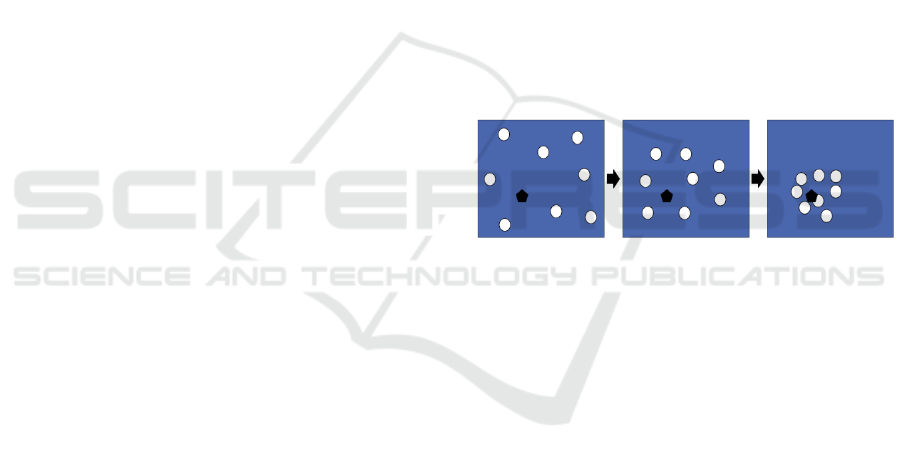
possibility of food being found. Figure 1 shows the
process of particle gathering.
Figure 1: Transition of particles.
Eight or more particles each search for and finally
gather near the target. Particle movement is
determined using three values. The first one is the
localbest. It stores the best value and coordinates that
the particle has searched. The second is globalbest. It
shares the coordinates with the best value in the
search of an entire particle group. The third is inertia.
Each particle holds a value indicating how much it
should move from its previous coordinates, and is
influenced by this value.
PSO is defined using the two equations above,
where i is the particle number, and t is the time. In
addition, 𝜔 is the inertia coefficient, and is set based
on how much inertia is affected from the vector 𝑉
𝑖
𝑡
from the previous point. Then, 𝑉
𝑖
𝑡+1
is a vector that
moves to the next coordinate (1). To calculate this
value, we need the constants C
1
and C
2
, the random
numbers rand
1
, rand
2
, the distance from the current
location to localbest 𝑃
𝑖
𝑡
, and the distance to globalbest
𝑃
𝑔
𝑡
. The coordinate of the next point is generated from
the movement vector to the current position and the
V
i
t+1
= ω V
i
t
+ C
1
rand
1
(
P
i
t
− X
i
t
)
+ C
2
rand
2
( P
g
t
− X
i
t
)
(1)
HAMT 2018 - Special Session on Human-centric Applications of Multi-agent Technologies
310
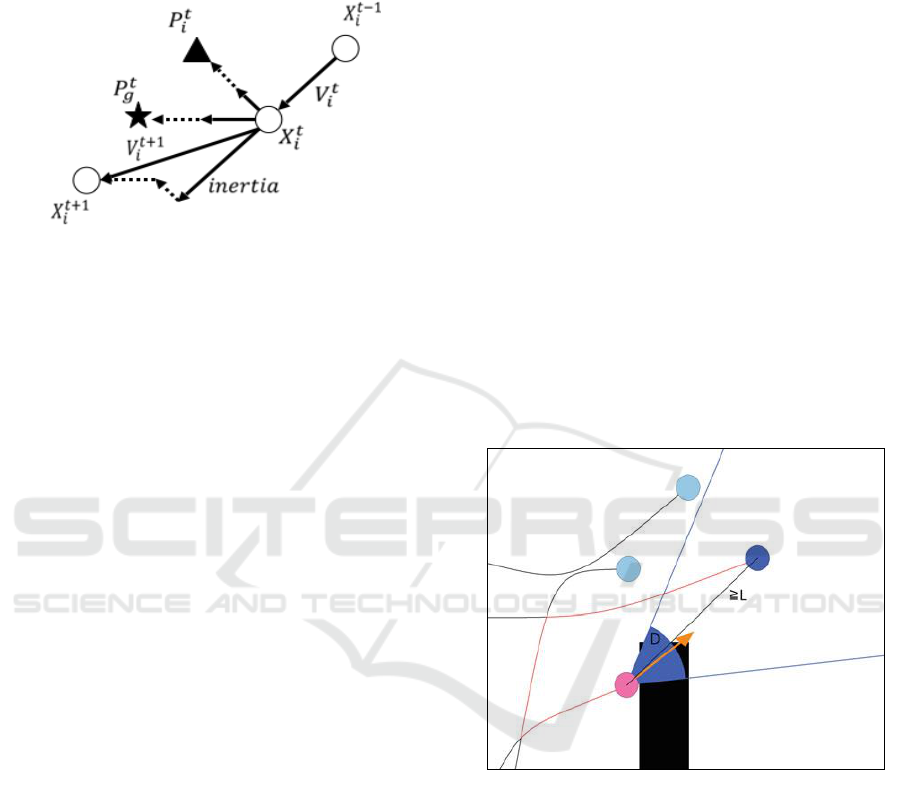
next point (2). Figure 2 shows the process for
determining the destination coordinates.
X
i
t+1
= X
i
t
+ V
i
t+1
(2)
Figure 2: Destination coordinate determination.
A multi-robot resource search based on PSO has
proved that more than eight robots can find targets in
an open space without a collision (Nighot et al.,
2012). In addition, Zhu et al. proposed an algorithm
that enables robots to search for targets without
accurate position information (Zhu et al., 2011).
However, they are intended to search in open spaces.
2.3 Extended PSO
Extended PSO described in this paper is an extension
of PSO that includes an obstacle avoidance algorithm.
Ishiwatari et al. showed its theoretical effectiveness
on a simulator (Ishiwatari et al., 2017). We
demonstrated its effectiveness using actual machines.
In general, PSO does not recognize the presence
of obstacles within the search range. For this reason,
when a robot is conducting a search, it is strongly
affected by obstacles. If the robot cannot easily avoid
an obstacle, time will be wasted. In order to solve this
problem, a method for generating a route to bypass an
obstacle using a mobile agent has been developed and
studied (Uehara et al., 2016). The effectiveness of this
agent was confirmed through simulations too.
An operational outline of extended PSO is as
follows. First, when a robot detects an obstacle, it
stops its movement and sends the mobile agent to the
nearest terminal. The agent holds the movement log
of the robot, and compares the movement logs of two
robots to judge whether there is an intersection. If so,
the agent moves to the other robot. This process is
repeated until the agent reaches the target robot.
Ultimately, the mobile agent reaches the target robot
within the range of L and D in Fig. 3, which are
arbitrarily set.
L and D are empirically derived constants. They
are used to determine to which robot the mobile agent
should migrate. L is the distance and set to be shorter
than the wireless range. The moving distance on the
straight line between the source and the target robot
needs to be not less than L. On the other hand, D is
the angle which indicates the rough direction to which
the mobile agent migrate. The target robot needs to be
within the angle D in front of the source robot. Uehara
et al. have intensively studied the optimal values of L
and D (Uehara et al., 2016).
The mobile agent then follows the moving robot
in reverse order and returns to the first robot. Next,
the collected data are handed over to the robot, and
the agent stops functioning. The robot receives the
search results of the alternative route. The robot
moves to a position based on such data and restarts
the search according to the PSO algorithm. The
calculation of the next point continues even when a
detour is being searched. If the next point becomes an
obstacle-free direction owing to the influence of
globalbest, the search for an alternative route is
stopped, and the search of the PSO is resumed.
In this
way, a detour is created to avoid wasting time if
obstacles are present. Figure 3 shows how the
extended PSO generates a detour.
Figure 3: Operation of extended PSO.
Another feature of this algorithm is the
replacement of robots. When robots detect a collision,
they continue searching after exchanging information
such as the search logs. They continue with their
actions as if the robots had simply passed each other.
This is because it is physically difficult for robots to
avoid and pass one another. Uehara et al. (2016)
demonstrated the theoretical effectiveness of this
algorithm.
2.4 Multi-robot System
Search and rescue can be efficiently conducted using
multiple well-coordinated robots. We addressed the
Mobile Agents for Robot Control based on PSO
311
collaboration between robots by employing multiple
mobile software agents. Because a robot operates
using batteries, the driving time is limited. Thus, it is
necessary to conduct an efficient search in less time.
In this study, we aim to introduce extended PSO using
a mobile agent.
3 PROPOSED METHOD
In this study, we use mobile software agents to allow
robots to share the globalbest value of PSO, and
conduct route generation using extended PSO. To
achieve this purpose, we created a platform for
sending and receiving mobile agents.
3.1 Python Agent Platform
A control program is used to send and receive agent
programs. The control program created in this study
is based on a Python agent platform, which is
installed in all robots. We have created this Python
agent platform for this purpose.
The platform consists of two parts. One is the
server part, which receives and processes agents. The
other is the client part, which transmits agents. The
server part waits for communication from the client
to receive an agent. On the other hand, the client
specifies the IP address of the server and sends the
agent to the remote server of the address. At that time,
the program code of the mobile agent is transmitted
after being converted into a character string. Then, the
server side of the remote site receives the character
string, and converts it into a program file. The server
then imports the content of the program file as a
module, and executes it. This is similar to the
serialization and deserialization in the Java system.
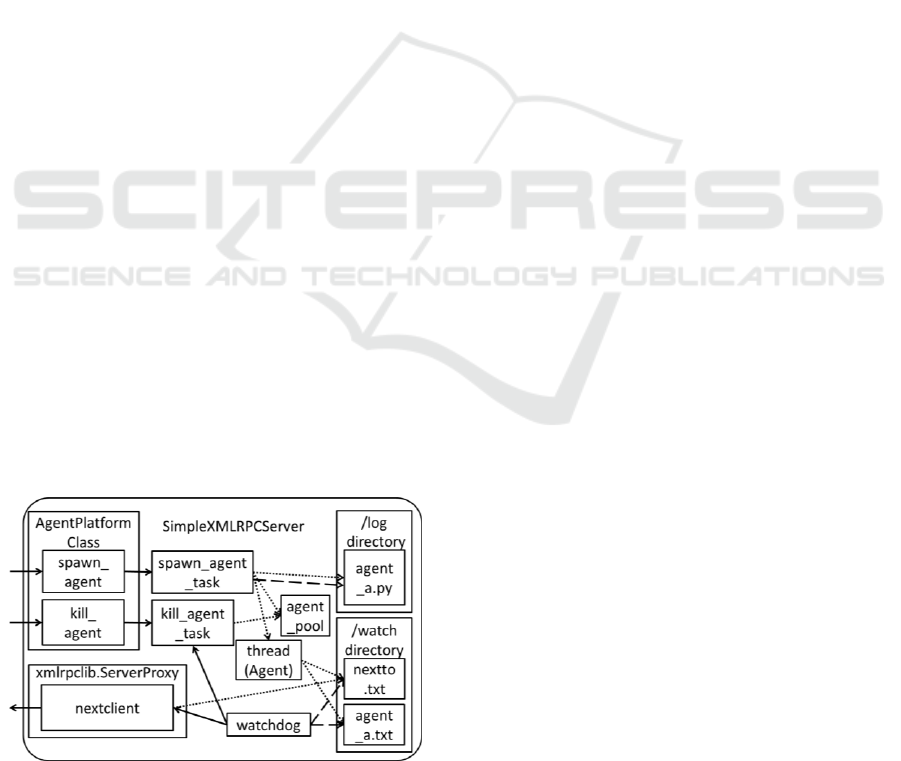
Figure 4 shows the schematic diagram of the agent
platform.
Figure 4: Agent platform overview.
The solid lines represent the function invocations.
The large dotted lines indicate references, and the
small dotted lines indicate the relation between the
generation and deletion of files. Another agent
platform on the left is assumed, and communication
is carried out. Details of this are provided in the
following subsections.
3.1.1 Initialization
All the robots are controlled using mobile agents.
Each robot waits for a starting signal that is issued by
the mobile agent. This initial transmission of the
mobile agent is achieved using the main controller on
the server PC. The main controller issues one mobile
agent for each robot as the starting signal. The content
of this signal is a file called start.txt. The initial
mobile agent puts this text file in the robot’s
directory. When the robot recognizes this file, it starts
searching.
3.1.2 Creation of Mobile Agents
The mobile agent program file is distributed to each
robot as start.txt. The mobile agent program can be
easily created, similar to a normal Python program.
The following program fragment shows the skeleton
of a typical agent program.
def main(name, arg):
f=open('./watch/'+name+'.txt','w')
f.write(anything)
f.close()
-here the body of the agent activities.
os.remove('./watch/'+name+.txt')
The name of the agent created is given as an
argument to the constructor. This name is used as an
accompanying text file name that indicates the
existence of the agent when it arrives at a new site.
When the agent leaves the site, or commits suicide, its
destructor deletes this text file.
When the mobile agent wants to migrate to
another site, it notifies the server regarding where it
will move next. In order to do so, the mobile agent
creates a text file called nextto.txt, and writes the IP
address of the target server.
f=open('./watch/nextto.txt', 'w')
f.write(IPaddress)
f.close()
3.1.3 Sending Mobile Agent
Upon receiving the agent’s request, the agent server
calls the client function to send the agent. The follow-
HAMT 2018 - Special Session on Human-centric Applications of Multi-agent Technologies
312

ing program fragment shows the client function.
def nextclient(task,name,arg):
server="http://"+nextip+":7070"
c=xmlrpclib.ServerProxy(server)
c.spawn_agent(task,name,arg)
The client function uses xmlrpclib of the Python
library. This library follows XML-RPC. First, the
destination IP address is set as the URL. Then, the
xmlrpclib.ServerProxy function is instantiated. This
function calls the function of the target server. By
activating the spawn_agent function existing on the
target server, the mobile agent starts up and begins
moving.
The arguments include the task (mobile agent
program code) and name (mobile agent name),
among others. The program code uses an open
function to refer to the program file. Alternatively, it
is also possible to transmit the received code as is or
after modification.
3.1.4 Receiving Mobile Agent
The server that receives the mobile agents uses the
SimpleXMLRPCServer library as follows:
s=SimpleXMLRPCServer((myip, 7070))
s.register_instance(AgentPlatform())
s.serve_forever()
In the initialization step, each server obtains its IP
address and assigns it to the variable myip. Next, it
specifies the AgentPlatform class using the
register_instance function in order to invoke the
methods defined in AgentPlatform. When all the
servers in this agent system perform this action, all
the functions in AgentPlatform are available for all
the servers in the system. It is necessary for the server
that receives the mobile agent to be active at all times.
In order to achieve this, the serve_forever function is
used.
3.1.5 Starting Mobile Agent
When the client starts the spawn_agent function in the
AgentPlatform class on the target server, the agent
starts up and begins moving. This is possible because
all the functions in all the AgentPlatform classes are
visible.
The received server creates a file called name.txt
using “name” in the “/log” directory. Next, it stores
the file as a module in the mloader library, and then
deletes the file. The mobile agent program is then
executed by assigning a thread.
3.1.6 Mobile Agent Movement
In this section, we describe how the code in Section
3.1.2 works. The server is always monitoring the
“/watch” directory in the watchdog library. This
makes it possible to conduct operations triggered
through a file creation, modification, or deletion.
When an agent creates a file called name.txt in the
directory, the server creates a name item in a
dictionary called agentpool. In it, the task, arg, and tid
are described. Here, tid is the return value at thread
startup. Then, when the agent deletes name.txt, the
server deletes the name item from within agentpool
using the kill_agent_task function. With this flow, we
manage the list of running agents.
On the other hand, when the agent generates a file
called nextto.txt, the server refers to the contents of
the document. Then, when the mobile agent stops its
operation, it executes the client function for that IP
address and transmits the mobile agent.
3.2 PSO
In this study, robots conduct a search using extended
PSO. For this reason, we first create a moving
algorithm using ordinary PSO and install it in the
robot. Next, the operation of extended PSO is added.
In PSO, each particle generates coordinates of the
next point from three values: localbest, globalbest,
and inertia. Among them, globalbest should always
be shared with other particles. A mobile agent is used
as a sharing method.
In this study, because a robot is regarded as a
particle, it is necessary to delicately adjust the motor
to move to the next point. The motor control at this
time is described in Section 3.4.
The mobile agents are responsible to allow all the
robots to share the globalbest. When a robot obtains a
better value than the currently held globalbest, it
shares its value and the current coordinates with the
other robots. Sharing will transmit only one hop
mobile agent to each robot. This agent compares its
value with the text file holding the globalbest of the
receiving side, overwrites the higher score, and
disappears. In this way, the values are shared.
At this time, we use the radio field intensity
indicator as the evaluation value. This value is called
the received signal strength indicator (RSSI). All
values are negative, and the closer a value is to zero,
the stronger the intensity, whereas the further away
from zero the value is, the weaker the intensity.
Therefore, as the value approaches zero, it can be
judged as approaching the coordinates of the search
target.
Mobile Agents for Robot Control based on PSO
313

In order to obtain the RSSI, the command
iwconfig is common. However, this command must
be connected to the target access point, which is not
suitable for searching for an unspecified terminal
called a victim. Therefore, we created a new
command called “getsi” that can be executed on the
terminal. The contents of the getsi command are as
follows:
#!/bin/sh
sudo iwlist wlan0 scan
| grep -e ESSID -e Quality
By executing this getsi command, it is possible to
obtain the SSID and RSSI values within the range that
can be currently recognized. The link quality refers to
the connection quality, and discrimination of noise
and other factors is carried out. However, because it
is difficult to obtain fine variations in values,
utilization at the time of medium distance use is
considered. At this time, we use RSSI as the main
evaluation value.
The RSSI can be obtained using the above
command. By applying it, we can execute this
terminal command on Python using a subprocess
library. By adjusting the result, we can obtain the
RSSI value. Thus, an evaluation value at this
coordinate is obtained.
3.3 Extended PSO
We extend PSO such that the algorithm includes a
feature for avoiding obstacles. Uehara et al. have
developed this avoidance algorithm (Uehara et al.,
2016). A mobile agent is used to generate a route to
avoid obstacles. At that time, other search robots
cooperate in route generation while conducting a
search as usual.
When a robot detects an obstacle, it stops and
generates a mobile agent. It then transmits to another
wirelessly connected robot. This agent moves
between the robots while holding the moved
coordinate log stored in each robot. The moved agent
determines whether there is an intersection of the
movement log of the current robot and the movement
log of the transmission source robot; it then holds the
log and moves to the next robot if it exists. On the
other hand, if there is no intersection point, it goes
back one step and moves to another connectable robot
and compares the logs. Finally, if a robot within L
meters and D degrees of the front of the source robot
is reached, it takes the previous movement log back
to the source robot. After that, interrupt handling is
applied at the server, and a detour route is generated
to avoid any obstacles.
The source robot shares its globalbest even before
the agent returns. Therefore, as the coordinates of the
globalbest are changed, the search may be possible
without bypassing the obstacle. At this time, the
search is immediately resumed.
When robots collide, they exchange all
information with each other. Then, the two robots
behave as if they had passed one another. For this
purpose, the robot stores all the values such as the
movement log and localbest in an array and transmits
the array using a mobile agent. When the exchange of
the values is completed for both robots, the
replacement ends. Next, both robots continue
searching for the next point. Ishiwatari et al., (2017)
developed this exchange algorithm.
3.4 Search Robot
Search and rescue is achieved using a team of mobile
robots. Because each search robot needs to
communicate with other robots, it is necessary to
construct a wireless network. Therefore, we created
robots equipped with Raspberry Pi. Our agent system
has been built to perform on top of the Raspbian
operating system in Raspberry Pi. Raspberry Pi uses
the GPIO pin to acquire data from the sensor and
control the motor. The robot has a caterpillar, and was
designed for comfortable rotation, making a change
in direction to the next point through PSO easy. With
PSO, because the sharing of coordinates is important,
controlled movement to an accurate position is
necessary. Therefore, directional data are acquired
using a compass module, which is used for angle
control. In addition, the coordinate data are obtained
through a GPS sensor. Because it is difficult to adjust
the position using a motor, a highly accurate
operation by the compass module is important. The
power supply supplies power from a mobile battery
for smartphone use. Figure 5 shows the search robot.
Because Raspbian is used as the operating system
of Raspberry Pi, and the agent platform is developed
using Python 2, the robot’s motor control system and
PSO were also written in Python. The reason for
adopting Python is that, because the agent platform is
on Python, it was judged that a more efficient
arrangement can be obtained if the same language is
used, and the behavior, including the robot’s motion
toward the mobile agent, can be directly described.
As a result, it is possible for the moving agent to
control the robot through interrupt handling.
To control the motor, we use the wiringpi library
and send instructions from the GPIO pin to the motor
driver. Four AA batteries are used for motor control,
and are installed separately from mobile batteries.
HAMT 2018 - Special Session on Human-centric Applications of Multi-agent Technologies
314
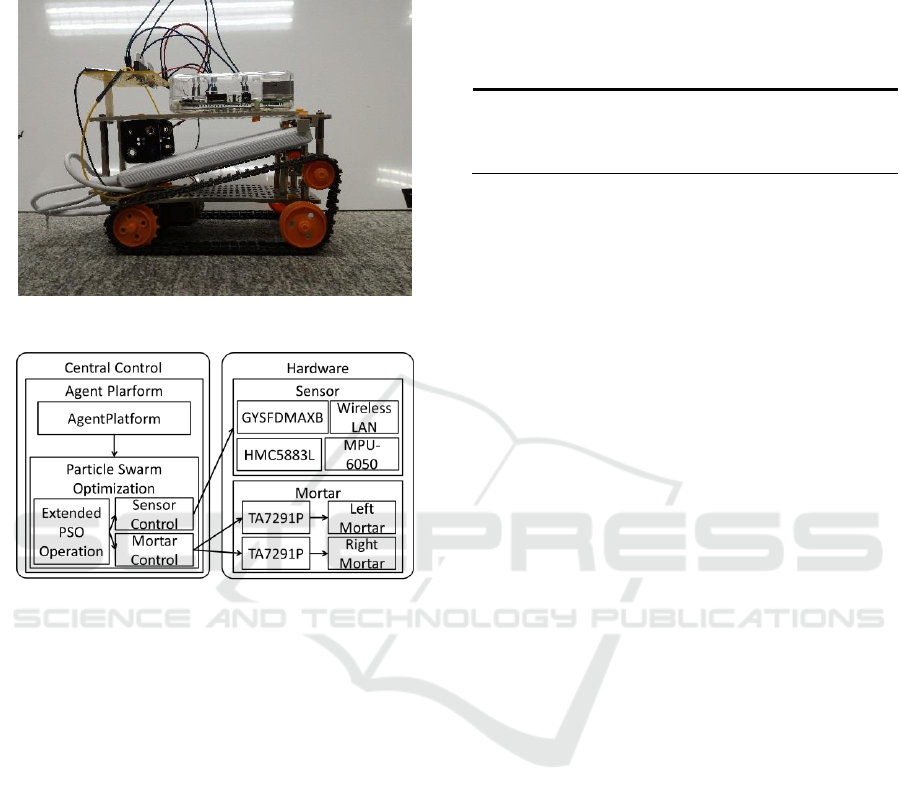
Figure 6 shows a schematic diagram of the robot
system. Descriptions of each part are described
below.
Figure 5: The search robot.
Figure 6: System configuration overview.
Central Control uses Raspberry Pi. Coordinate
calculations of PSO are performed based on data from
each sensor. At this time, the globalbest is shared
using the mobile agent. The next coordinates are
calculated, and the motor is controlled to guide the
robot to the next coordinates. At this stage, errors
from the motor may occur, and it is necessary to
continuously monitor the robot using a compass
module, GPS sensor, or similar device, correct any
errant values, and move to the accurate coordinates.
Agent Platform receives and executes an agent.
The agent starts operation from the client by
activating the function in it. It manages what agents
reside on the robot. In addition, when the agent is a
mobile agent, as described above, a new agent
program is generated, and a function used as a client
is activated by specifying the next movement
destination. This is a control program that mainly
manages and operates a list of agents.
Sensors collect the surrounding data are
numerized and imported into a robot. Based on these
values, PSO is executed. Because the sensors are
connected to GPIO pins, addition and reduction are
easy to achieve. Data essential for PSO, such as the
coordinates and angle, are obtained from each sensor.
The data are analyzed programmatically and reflected
in the robot operation. Table 1 shows the mounted
sensors.
Table 1: Mounted sensors.
GPS sensor
GYSFDMAXB
Compass module
HMC5883L
Acceleration sensor
MPU-6050
Mortar is TA7291P that is used for the motor
driver applied to the motor control. Control is carried
out using a program with the aforementioned carpi
library. The speed of the motor can be adjusted. It is
important to rotate at a low speed so as not to avoid
overlooking the value of the compass module when
turning toward the next movement point. Four AA
batteries are used as the motor power supply.
Figure 7 shows a team of mobile robots search a
target under control of mobile agents. The Wi-Fi
access point in the photo is the target.
4 DISCUSSION
For the experiment applied during this project, we
used an environment in which communication
through wireless LAN can be established. The agent
uses the IP address to specify the transmission
destination. Therefore, this agent platform cannot
operate unless the terminal is given an IP address.
However, we may need to cope with an
environment in which wireless LAN is not available.
In such a case, it may be necessary to achieve
communication using a mobile ad hoc network. This
results in a dynamic network configuration and very
unstable communication. However, if information
sharing using mobile agents can be achieved, the
search can be conducted more efficiently.
If a mobile ad hoc network is to be implemented,
routing that takes into account network congestion
and terminal power consumption becomes necessary.
Furthermore, it is necessary to deeply consider a
method for bypassing the communication when a
terminal is disconnected. Such methods have been
actively debated (Kambayashi et al., 2016).
5 CONCLUSIONS
In this paper, we proposed and developed a mobile
Mobile Agents for Robot Control based on PSO
315

Figure 7: Team of robots cooperatively search.
agent system using Python in order to create a system
that carries out expanded PSO using real robots,
which conduct a search as PSO particles. The
imaginary application is a search and rescue operation
after disaster in an urban area. Even though the
current system is a team of prototype robots, revised
robots should be able to locate the victims buried in
rubble in the disaster area.
In addition, we believe that flexibility between
mobile agents and mobile ad hoc networks is
compatible within a limited environment such as a
disaster site. However, in constructing MANET, the
problem raised in Section 4 occurs. In order to operate
a search system using an agent system at a real
disaster site, it is necessary to address these issues.
ACKNOWLEDGEMENTS
The authors appreciate Yuta Arai and Taiki
Miyakawa for their contribution in the
implementation of the robot systems. This work is
partially supported by Japan Society for Promotion of
Science (JSPS), with the basic research program (C)
(No. 17K01304), Grant-in-Aid for Scientific
Research (KAKENHI) and Suzuki Foundation.
REFERENCES
Avilés, A., Takimoto, M. and Kambayashi, Y., 2014.
Distributed evacuation route planning using mobile
agents, In Transactions on Computational Collective
Intelligence XVII, pages 128-144.
Ishiwatari, H., Sumikawa, Y., Takimoto, M. and
Kambayashi, Y., 2017. Cooperative Control of Multi-
Robot System Using Mobile Agent for Multiple Source
Localization, In Proceedings of the Eighth
International Conference on Swarm Intelligence, pages
210-221.
Kambayashi, Y., Nishiyama, T., Matsuzawa, T. and
Takimoto, M., 2016. An Implementation of an Ad hoc
Mobile Multi-Agent System for a Safety Information,
In Proceeding of the Thirty-sixth International
Conference on Information Systems Architecture and
Technology, pages 201-213.
Kambayashi, Y. and Takimoto, M., 2005. Higher-Order
Mobile Agent for Controlling Intelligent Robots,
International Journal of Intelligent Information
Technologies, 1(2), 28-42.
Kennedy, J. and Eberhart, R., 1995. Particle swarm
optimization, In Proceedings of IEEE International
Conference on Neural Networks 4, pages 1942-1948.
Mondada, F., Pettinaro, G. C., Guignard, A., Kwee, I. W.,
Floreano, D., Deneubourg, J., Nolfi, S., Gambardella, L.
M., and Dorigo, M., 2004. Swarm-Bot: a New
HAMT 2018 - Special Session on Human-centric Applications of Multi-agent Technologies
316

Distributed Robotic Concept, Autonomous Robots,
pages 193-221.
Nagata, T., Takimoto, M. and Kambayashi, Y., 2013.
Cooperatively Searching Objects Based on Mobile
Agents, In Transaction on Computational Collective
Intelligence XI, pages 119-136.
Nighot, M. K., Patil, V. H. and Mani, G. S., 2012. Multi-
robot hunting based on swarm intelligence, In Hybrid
Intelligent Systems (HIS), 2012 12th International
Conference, pages 203-206.
Parker, L. E., 2008. Distributed intelligence: overview of
the field and its application in multi-robot systems,
Journal of Physical Agents, 2(1), pages 5-14.
Stone, P. and Veloso, M., 2000. Multiagent systems: A
survey from a machine learning perspective,
Autonomous Robots, 8(3), 345-383.
Shibata, K., Takimoto, M. and Kambayashi, Y., 2014.
Expanding the Control Scope of Cooperative Multiple
Robots, Proceedings of the Eighth KES International
Conference on Agent and Multi-Agent Systems:
Technologies and Applications, In Advances in
Intelligent Systems and Computing Volume 296, pages
17-26.
Taga, S., Matsuzawa, T., Takimoto, M. and Kambayashi,
Y., 2017. Multi-Agent Approach for Evacuation
Support System, In Proceeding of the Ninth
International Conference on Agents and Artificial
Intelligence, pages 220-227.
Taga, S., Matsuzawa, T., Takimoto, M. and Kambayashi,
Y., 2016. Multi-Agent Approach for Return Route
Support System Simulation, In Proceeding of the
Eighth International Conference on Agents and
Artificial Intelligence, pages 269-274.
Takahashi, R., Takimoto, M. and Kambayashi, Y., 2015.
Cooperatively Transporting Unknown Objects Using
Mobile Agents, In Agents and Artificial Intelligence:
6th International Conference, pages 46-62.
Uehara, S., Takimoto, M. and Kambayashi, Y., 2016.
Mobile Agent Based Obstacle Avoidance in Multi-
Robot Hunting, In Proceedings of the 20th Asia Pacific
Symposium on Intelligent and Evolutionary Systems,
pages 443-452.
Zhou, Y., Xiao, K., Wang, Y., Liang, A. and Hassanien, A.
E., 2013. A pso-inspired multi-robot map exploration
algorithm using frontier-based strategy. International
Journal of System Dynamics Applications, 2(2), 1-13.
Zhu, Q., Liang, A. and Guan, H., 2011. A pso-inspired
multi-robot search algorithm independent of global
information, Proceedings of IEEE Symposium on
Swarm Intelligence, pages 1-7.
Mobile Agents for Robot Control based on PSO
317
