
Modelling a CPS Swarm System: A Simple Case Study
Melanie Schranz
1
, Alessandra Bagnato
2
, Etienne Brosse
2
and Wilfried Elmenreich
3
1
Lakeside Labs, Klagenfurt, Austria
2
Softeam, Research and Development Department, Paris, France
3
Alpen-Adria-Universit
¨
at Klagenfurt, Klagenfurt, Austria
Keywords:
Cyber Physical Systems(CPS), Unified Modeling Language (UML), Swarm of CPS, System Modeling
Language (SysML), Swarm Algoritms, Optimization.
Abstract:
The CPSwarm workbench is a toolchain that facilitates the entire design process of swarms of CPS including
modelling, design, optimization, simulation and deployment. This paper highlights part of the work of the
CPSwarm workbench in the context of the CPSwarm H2020 project. In particular, the CPSwarm workbench
allows to create a generic swarm library that can be customized by developers to design new swarm environ-
ments, new swarm members and new swarm goals. This paper shows an application of the initial CPSwarm
workbench by the example of a reference problem called EmergencyExit. In this example a swarm of robots
needs to find an exit in an unmapped environment and leave this room through the exit as soon as possible.
The example problem is further used to show the integration of Modelio, a UML/SysML modelling tool, and
FREVO, an optimization tool in the CPSwarm workbench.
1 INTRODUCTION
Cyber Physical Systems (CPSs) are characterized by
the strong integration of software and hardware (Mar-
tins and McCann, 2017). Their concept enriches em-
bedded devices by interacting with the physical world
through sensors and actuators. A typical characte-
ristic is the strong focus on a high interconnection
among CPSs. As tasks are getting complex with
swarms of autonomous drones, cars, or ground rovers,
systems of swarms of CPSs become challenging to
design, implement, optimize, and deploy (Lee, 2008).
To address this problem, we suggest to build a tool-
chain covering the development steps, starting with
design of a swarm of CPS, optimization and simula-
tion of the used algorithms, and deployment on the
final piece of hardware.
In this work, we focus on modelling a swarm
of CPS. This includes adapting and extending ex-
isting approaches as well as developing new CPS
models where no reference model is available. Of
special interest are available open source approaches
and examples like developed in the INTO-CPS pro-
ject
1
. The INTO-CPS project makes use of UML and
SysML (Bagnato et al., 2016) profile. It aims to de-
1
http://projects.au.dk/into-cps/
velop a model-based tool chain for CPS development,
applying model-based systems engineering (MBSE):
high level simulation using the FMI standard between
the simulation engine and the related modelling tools
such as Overture, OpenModelica, and 20-sim; C code
generation for specific platforms; and test automa-
tion is also in the scope of the project via the usage
of tools such as RT-Tester Model-Checker (Larsen
et al., 2016), (Bagnato et al., 2015). In order to de-
sign swarm systems, we refer to related approaches
from designing self-organizing systems for technical
applications (Elmenreich and de Meer, 2008), which
involves bio-inspired design, trial and error and lear-
ning from optimal solutions that use additional infor-
mation, like perfect sensors, which are removed later
(Auer et al., 2008).
This work contributes to the EU-H2020 project
CPSwarm
2
by focusing on the modelling and optimi-
zation of swarms of CPSs (Bagnato et al., 2017). The-
refore, we introduce the EmergencyExit example that
is used as use case for the initial library of CPS mo-
dels. In the EmergencyExit example, multiple swarm
members move in a simple 2D discrete environment
and try to find one out of the two emergency exits. In
each discrete time step, a CPS senses the neighbou-
2
https://cpswarm.eu
Schranz, M., Bagnato, A., Brosse, E. and Elmenreich, W.
Modelling a CPS Swarm System: A Simple Case Study.
DOI: 10.5220/0006731106150624
In Proceedings of the 6th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2018), pages 615-624
ISBN: 978-989-758-283-7
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
615

ring cells and moves to a free cell. When a CPS rea-
ches an emergency exit, it is removed from the envi-
ronment. The goal is that all CPSs exit the environ-
ment.
For this case study, we built upon the follo-
wing tools: the modelling tool Modelio developed
by Softeam and the optimization tool FREVO (Sobe
et al., 2012) developed by Lakeside Labs/Alpen-
Adria-Universitt Klagenfurt.
The rest of this paper is organized as follows:
Section 2 provides a background about CPSwarm,
Modelio and FREVO. Section 3 summarizes the CPS
swarm model indroduced by CPSwarm. Section 4
describes the workbench approach and shows how
Modelio and FREVO are used to achieve the CPS-
warm goals. Section 4 depicts the results and dis-
cusses how the evolved algorithms can be evaluated.
Section 5 concludes the paper.
2 BACKGROUND
2.1 CPSwarm Project
The main motivation of the EU-H2020 CPSwarm pro-
ject is to provide a workbench to explicitly manage
behavior and emerging properties of swarms of CPS.
This CPSwarm workbench CPSwarm tools will ease
development and integration of complex herds of he-
terogeneous CPS that collaborate based on local po-
licies and that exhibit a collective behavior capable
of solving complex, industrial-driven, real-world pro-
blems. Related to this paper, the main goals of the
project are to significantly improve the support to
design complex, autonomous swarms of CPS; pro-
vide a self-contained, yet extensible library of re-
usable models for describing CPS; enable a sensible
reduction in complexity and time of the CPS deve-
lopment workflow; and to establish reference patterns
and tools for integration of CPS artefacts. Further de-
tails to the CPSwarm project are already presented
in (Bagnato et al., 2017).
Inside the CPSwarm architecture, a Design En-
vironment has been specified. This environment is
responsible of providing the CPS swarm architecture
modelling functionality and is composed of two sub
components - the Modelling Tool and Modelling Li-
brary - that are strongly linked. The Modelling Tool
also uses the Optimization Tool API to communicate
with the Optimization Tool - part of the Algorithm
Optimization Environment as shown in Figure 1.
The current CPSwarm Workbench includes tools
provided by the contributing partners: Modelio as the
Figure 1: The Design Environment Architecture.
modelling tool and FREVO as the optimization tool
that are presented in the following subsections.
2.2 Modelio
Modelio
3
is a modelling environment developed by
Softeam under a dual license, commercial and GPLv3
open-source. Modelio is based on Eclipse Rich Plat-
form (RCP). It is used to create and manage mo-
dels in various formats and notations. In addition,
it provides many software features that compliments
its modelling features such as: model transformation,
code-to-model reverse engineering, and code genera-
tion. The CPSwarm Modelling Tool is built on top
of the open source modelling environment (suppor-
ting UML2, BPMN2, MARTE, and SysML standards
among others) named Modelio. Modelio Architecture
is built around a central repository, around which a set
of extension are defined cf. Figure 2.
Each extension provides some specific facilities,
which can be classified in the following categories:
• Scoping: this category is composed of Go-
als, Dictionary, Business Rules and Requirement
which allow specifying high-level business mo-
dels for any IT system;
• Modelling: for example, SysML, MARTE and
BPMN are included in this category. The extensi-
ons belonging to this category are used to model
different specific aspects of a system such as Bu-
siness Process, component architectures, SOA, or
embedded systems;
• Code generators: such as C++ or JAVA. These ex-
tensions allow users to generate and to reverse the
code to/from different programming languages;
3
https://www.modelio.org/
IndTrackMODELSWARD 2018 - MODELSWARD - Industrial Track
616
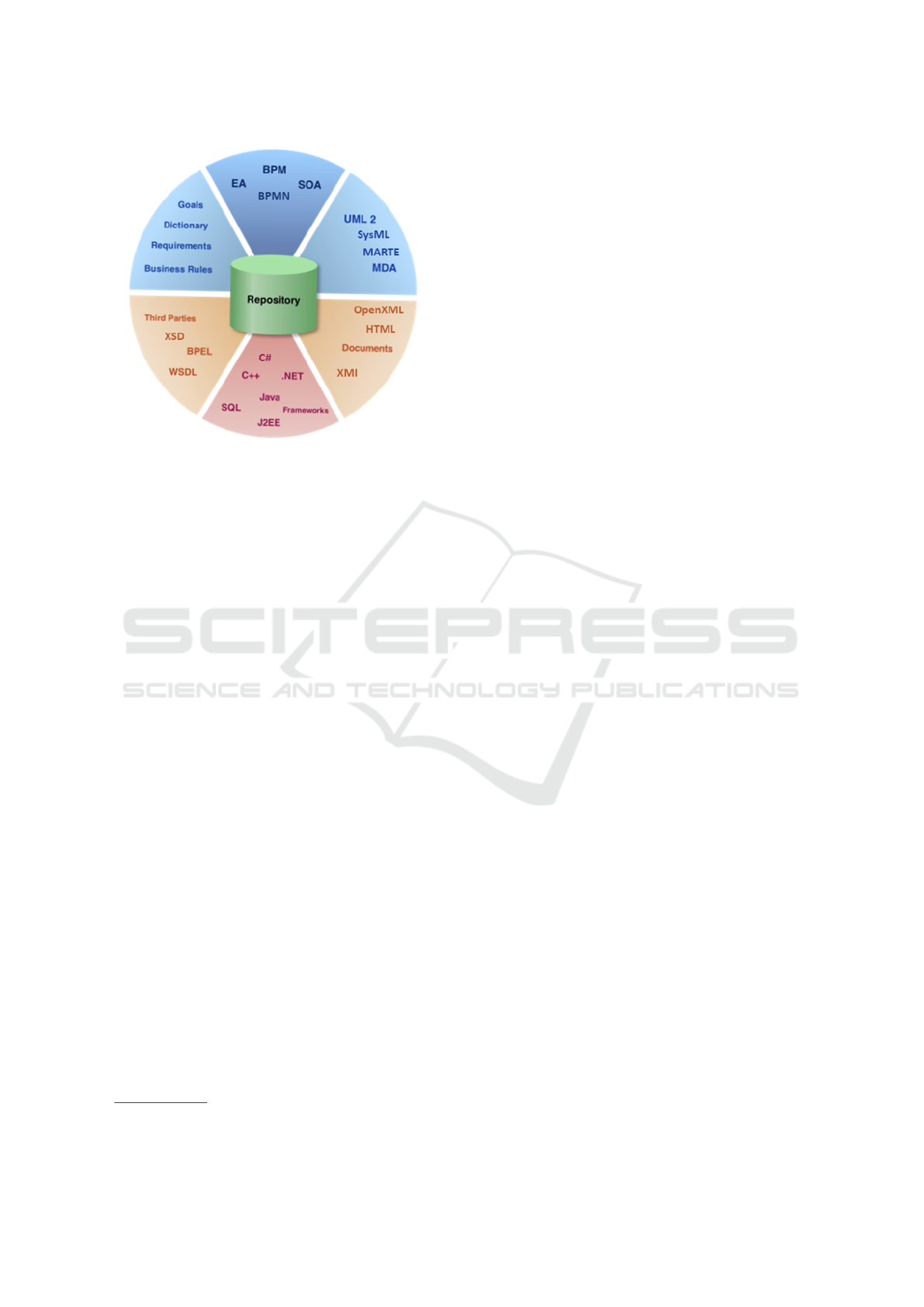
Figure 2: The Modelio architecture.
• Utilities: modules allowing transversal utility fa-
cilities like teamwork or import/export functiona-
lities.
This architecture allows Modelio modelling envi-
ronment to be flexible and configurable simply by ad-
ding the desired extension and related functionalities.
As depicted in Figure 3, the CPSWarm Modelling
tool is composed of Modelio itself, a dedicated CPS-
warm extension to provide the functionalities related
to CPS swarm design, and also a set of pre-existing
extensions to reuses their relevant functionalities in
the CPSwarm context. At M9 of CPSwarm project,
only the SysML extension has been pick for its functi-
onalities related to System modelling.
Extension has mean to extend the underneath Mo-
delling environment. This extension can be done in
several ways including:
• the metamodel by specifying stereotypes,
• the menus by adding commands (or buttons),
• the behaviour by listening specific events.
All the extension points are currently used by the
CPS swarm extension and are detailed in the follo-
wing sections.
2.3 FREVO
FREVO
4
- the FRamework for EVOlutionary design
- is a software tool to design self-organizing systems.
It is a general purpose framework that optimizes a ge-
neric representation of a given problem using evolu-
tionary methods. Such an evolutionary approach re-
quires a testbed that allows extensive and safe testing
4
http://frevo.sourceforge.net/
at low cost, for example a simulation of the target sy-
stem with a model of the environment, the agents and
their sensor/actor interface (Elmenreich et al., 2009).
As it supports agent-based modelling, it is well suited
to evolve the controllers for CPSs, when the control-
ler is implemented as a generic, evolvable represen-
tation, e.g., an artificial neural network (ANN). An
iterative heuristic search is applied to find an optimi-
zed configuration of the controller for a CPS with re-
spect to a system level optimization measure, called
fitness. The result is a controller that exhibits the lo-
cal interaction rules to reach the desired global beha-
viour of the system. The controller can be evaluated
on a large scale of parameters under predefined con-
ditions. FREVO uses a modular approach, where the
distinct steps of evolutionary design are split into dif-
ferent components. Its graphical user interface (GUI)
simplifies the design process and offers statistics and
graph generation for easy evaluation of the chosen de-
sign. The main purpose of FREVO is to support the
optimization process as it guides through the indivi-
dual steps of the evolutionary design, whereas it re-
quires work by the software developer to implement
the modelled problem details.
FREVO is implemented in the Java programming
language and makes strong use of the object-oriented
programming paradigm. FREVO’s architecture is
component-based (see Figure 4) and where each com-
ponent implements a distinct feature of the evolutio-
nary approach. The problem component defines the
specifics of a CPS controller, the environment, and
the fitness function. The representation component
defines how the controller of the CPS is represented.
The optimization component defines the method for
finding the optimal candidate representation. The mu-
tation and crossover operators are encapsulated with
the representation, while population size and number
of generations defined in the optimization component.
FREVO provides a number of different implementa-
tions for each component type, for example there are
different evolutionary optimization strategies availa-
ble (Dittrich and Elmenreich, 2015; Zhevzhyk and El-
menreich, 2015).
The ranking component defines how the candi-
date representations are ordered based on their perfor-
mance according to the fitness function. Each compo-
nent is defined by an abstract class so that the interfa-
ces between the components are well defined. The-
refore, new components can easily be implemented
requiring only the implementation of the core functi-
onality. This step is guided by the built-in component
generator that assists the software developer by gene-
rating the required code skeleton in the context of the
class hierarchy.
Modelling a CPS Swarm System: A Simple Case Study
617
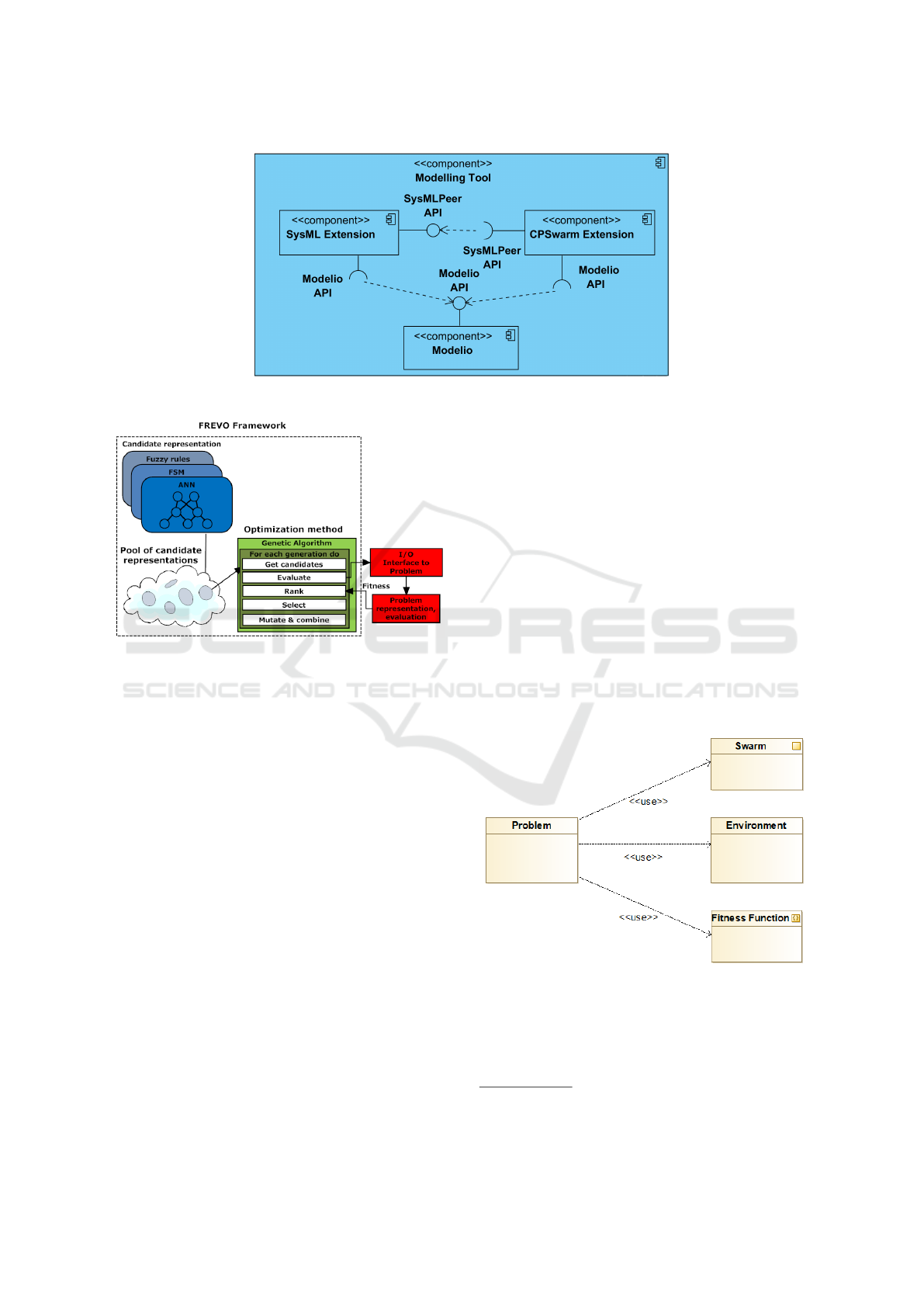
Figure 3: The modelling tool architecture.
Figure 4: The FREVO architecture.
3 LIBRARIES TO MODEL CPS
SWARMS
The overall idea is to have a library for the modeller
that contains certain predefined models. These mo-
dels can be reused, changed or added by the modeller.
Such a library structure supports the process of mo-
delling swarms of CPSs. The models in the libraries
are separated into three groups of libraries: swarm
members, environments, and goals. These three li-
braries are used to model a problem as shown in Fi-
gure 5. Each model in the library (swarm member,
environment, and goal) has the following mandatory
parts:
Unique name:
• each model needs to be distinguishable from other
models by name,
• each models name needs to be given in a way that
is associated with the models functionality.
Description
• a detailed description is necessary for i) documen-
tation and ii) the programming tasks by the soft-
ware developer,
• the description is created as parameter of the mo-
del with Property: string [256] (see point 3 Para-
meters for further details).
Parameters
• each model contains a set of parameters that have
the following form:
– Property: name, type [range]: Defines a con-
stant parameter of the model,
– Input: name, type [range]: Defines an input pa-
rameter to the model,
– Output: name, type [range]: Defines an output
parameter of the model.
The following sections describe in more details of
each library by referring to the EmergencyExit exam-
ple already described in section 1.
Figure 5: Problem Statement.
The modelling is performed by using SysML lan-
guage and, more precisely, a Block Definition Di-
agram (BDD). The CPSwarm initial library on the
EmergencyExit is stored on the Modelio Forge
5
.
5
https://forge.modelio.org/projects/cpswarm-
modelio36/files
IndTrackMODELSWARD 2018 - MODELSWARD - Industrial Track
618

3.1 Swarm Member
The swarm member library describes a single CPS in
the swarm. To better specify the characteristics of a
CPS, we introduce several sub-libraries (together with
examples) including:
• library ”local memory”: local status, e.g. the cur-
rent x/y position, available energy, etc.
• library ”behaviour”: collecting data from sensor,
performing calculations, sending data to actua-
tors,
• library ”physical aspects”: sensors and actuators,
• library ”security”
• library ”human interaction”
Related to the EmergencyExit example the swarm
member is a ground rover. The corresponding swarm
member model architecture is depicted in Figure 6.
Each rover has a local state (sub-library local me-
mory) to express its current x/y position. Further,
each rover needs sensors and actuators (sub-library
physical aspects). The first sensor ”POI Sensor” re-
turns a vector, describing the path to the next point
of interest (POI). The second sensor ”Range Sensor”
returns the map around the swarm member. The actu-
ator is called ”Locomotion” and is a motor that moves
the swarm member to a given x/y coordinate. Finally,
the behaviour (sub-library behaviour) is modelled as
”EmergencyExit Behavior” and describes the Emer-
gencyExit problem definition (see Section 1).
Finally a swarm can be modelled by a compostion
of a set of swarm members (see Figure 7).
3.2 Environment
The environment library describes the environment in
which the swarm of CPSs is acting. Several aspects
express an environment, whereby the following ones
are modelled (see Figure 8):
• 2D map of the environment,
• size of the environment,
• resolution,
• points of interests (emergency exits).
3.3 Fitness Function
The fitness function represents the goal of the speci-
fied CPS swarm. By maximizing this fitness function,
the Algorithm Optimization Environment (cf. Section
4) can provide the best CPS swarm configuration. Fi-
gure 9 corresponds to the modelled goal of the Emer-
gencyExit example. The goal of the swarm of CPSs is
to find the two points of interest - the emergency exits
- as fast as possible. Achieving this goal is expressed
by the fitness value, computed by following equation:
−
∑
i
p
(POI.x − LocalState
i
.x)
2
+ (POI.y − LocalState
i
.y)
2
(1)
In this fitness function the distances of all swarm
members i to a point of interest are summed up and
negated. Since the sum of the distances would be a
cost function, the negation is used to express it as a
fitness function. To modify the intended behavior it is
sufficient to change the fitness function.
4 CPS SWARM MODELLING
WITH THE CPSWARM
WORKBENCH
The initial CPS models that are developed in Section 3
are the first parts of the CPS modelling library. As in-
troduced in Figure 1 the modelling library represents
just one component within the design environment ar-
chitecture of the CPSwarm workbench. This library is
used by the modelling tool to model swarms of CPSs.
Via the optimization tool API these models are used
as input for the optimization tool for further optimiza-
tion. For the Modelling Tool, we use Modelio (intro-
duced in Section 2.2). For the Optimization Tool, we
use FREVO (introduced in Section 2.3). The integra-
tion of the tools together with the API are described
in the following sections.
4.1 Integration of Modelio to the
Architecture
Modelling is always a difficult task if you want to
start from scratch. In this case, guidance is helpful.
With Modelio we are able to generate a swarm tem-
plate for the end users. The main goal of this swarm
template generation command is to help the modeler
by creating a simple CPS swarm model with all mi-
nimum concept. The CPS swarm generation can be
done by right clicking on any package, then selecting
CPSwarm/CPS swarm creation entry as depicted in
Figure 10.
Figure 11 shows the result of the CPS swarm tem-
plate generation. The swarm template generator pro-
duces a set of initial diagrams that have been identi-
fied as necessary to completely model a CPS swarm.
As described in the previous section this includes the
swarm and its member, the environment, and the goal
or fitness function.
Modelling a CPS Swarm System: A Simple Case Study
619
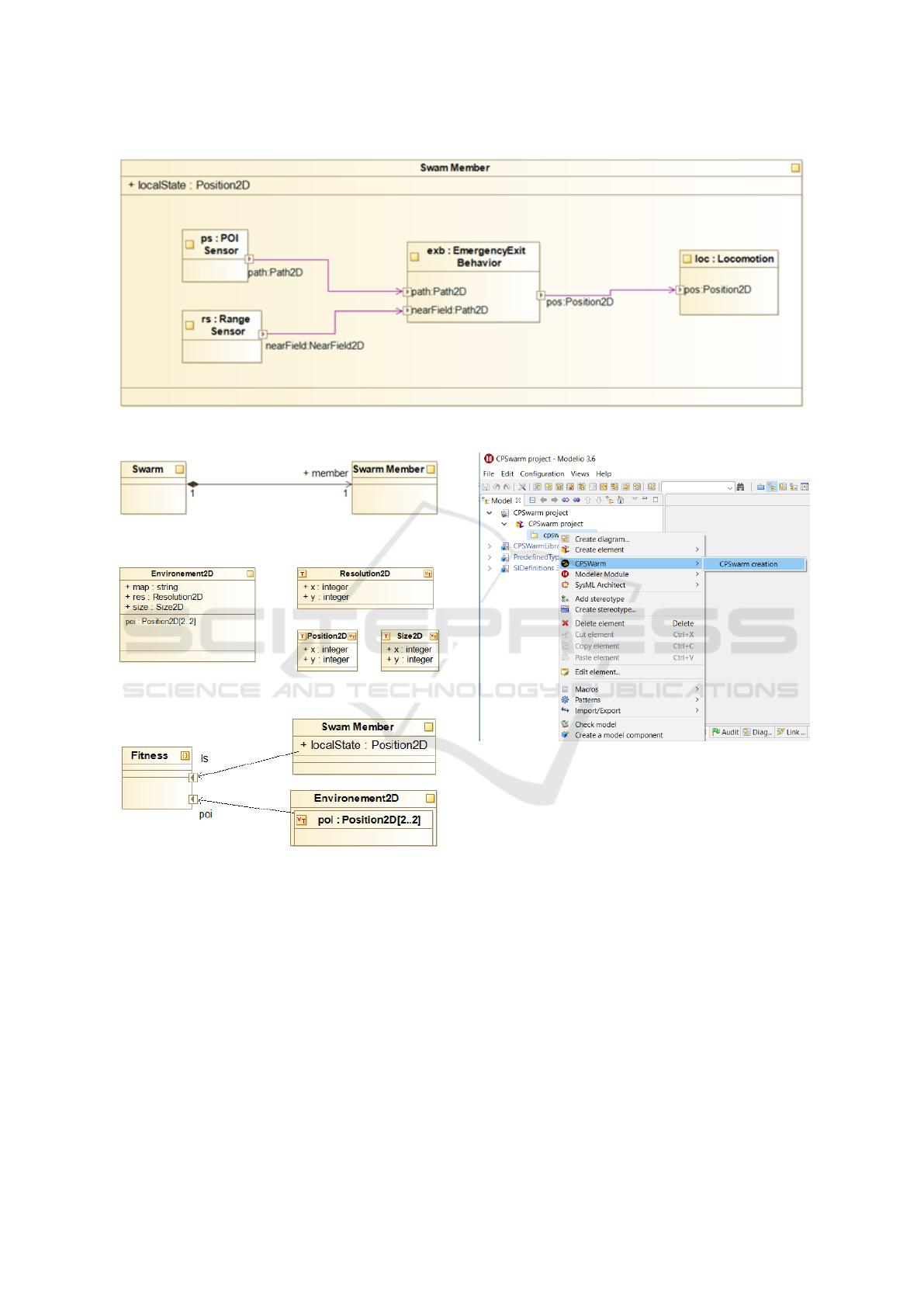
Figure 6: The swarm member architecture.
Figure 7: The swarm architecture.
Figure 8: The environment model.
Figure 9: Modelling of the Fitness Function.
The modeler can modify their initial content by
following the needs of the specific case study he/she
is modelling. The CPSwarm modeler will find on
the right part of each of the diagrams (namely En-
vironment Definition, Goal Definition, Problem Sta-
tement, Swarm Architecture, Swarm Member Archi-
tecture) the predefined selection of the modelling ele-
ments he/she can specifically use for that specific di-
agram context. Environment Definition and Problem
Statement mainly uses UML Class Diagram and rela-
ted concepts. Swarm Architecture and Swarm Mem-
ber Architecture are specified by using, respectively,
SysML Block Diagram Defition (BDD) and Internal
Figure 10: Creating a new swarm model.
Block Diagram (IBD) elements. SysML Parametric
Diagram and MathML are both used for Goal Defi-
nition. Figure 12 is showing the specific modelling
environment for the Swarm Member Architecture Di-
agram. The diagram is meant to show the high-level
structure of the swarm member.
4.2 Design of the Optimization Tool API
The optimization tool API passes configuration files
from the modelling tool to FREVO. This configura-
tion consists of two files: The problem description
and the optimization parameters. The problem des-
cription is a generated .java file. It contains every-
thing that is necessary to test and evaluate a possible
solution. This functionality is used by the optimiza-
tion tool to perform an automated search for a viable
solution. The parameters are available in a .xml file.
They describe the setup of FREVO. These parameters
IndTrackMODELSWARD 2018 - MODELSWARD - Industrial Track
620

Figure 11: New swarm result.
include configuration, properties, and requirements.
Both parts are exported from the Modelio (see Figure
13). Once these files are passed to FREVO, a recom-
pilation of FREVO is required before starting the op-
timization process.
4.3 Integration of FREVO to the
Architecture
FREVO requires configuration and code of a new pro-
blem to be implemented via a .java and .xml file. Both
files have been already generated in the Modelling
Tool, although the implementation part needs to be
extended. The main task is to implement the evalu-
ateCandidate method, where the given candidate re-
presentation needs to be evaluated. This is done by
simulation, either by implementing it directly within
FREVO or by calling an external simulator. There-
fore, a model of the environment and the CPS capa-
bilities, i.e. its sensors and actuator behavior need to
be implemented. The sensor input(s) of the CPS are
passed to the getOutput method of the candidate re-
presentation, which returns the output for the actua-
tor(s). Additionally, a suitable performance measure
needs to be implemented that is used to return the fit-
ness value of the simulation run.
After the implementation of a component is com-
plete, the component needs to be compiled. It is then
automatically loaded upon the launch FREVO.
After launching FREVO, following settings for
the simulation need to done:
• Selected Problem: EmergencyExit
• Selected Method: CEA2D
• Selected Representation: FullyMeshedNet
• Selected Ranking: Absolute Ranking
The method CEA2D is a cellular evolutionary al-
gorithm (EA) that arranges all candidates on a 2D to-
rus surface. Genetic operations are performed in a
local context. It features better diversity with slower
convergence compared to a standard EA (Dittrich and
Elmenreich, 2015). For the representation, we select
FullyMeshedNet. It is a recurrent, fully meshed ANN
with one hidden layer. During evolution, the biases
of the neurons as well as the connection weights are
changed. Adaptive mutations are also supported. The
ranking algorithm sorts candidate representations ba-
sed on their performance, i.e. their fitness value. For
this example absolute ranking is selected. A ranking
algorithm that sorts candidates by the fitness value
returned from the problem component. It supports
multi-threading to decrease the time needed for op-
timization.
After a click on the play button the optimization
runs until the selected termination criterion has been
fulfilled. Figure 14 shows the simulation result of the
EmergencyExit example - the fitness value is max-
imized towards 0. FREVO has several more featu-
res: The entire simulation run is saved automatically.
Nevertheless, you could click the ”Pause” button and
”Save” the simulation at a specific generation. This
is not the final evolved one, but a specific interme-
diate state of evolution. Moreover, when you click
the ”Replay” button, to get more information on the
evolutionary produced results. FREVO allows also to
evaluate the evolved results with a simple graphical
representation of the simulation.
5 EVALUATION
The evolved result from FREVO provides the beha-
vior of the swarm members for the given problem.
These evolved results come as a black box algorithm,
so it is necessary to evaluate the performance of the
algorithm under different environments. FREVO al-
lows to evaluate the evolved results of the related
problem definition with different variations, including
changing the number of candidates, the size of the 2D
Modelling a CPS Swarm System: A Simple Case Study
621
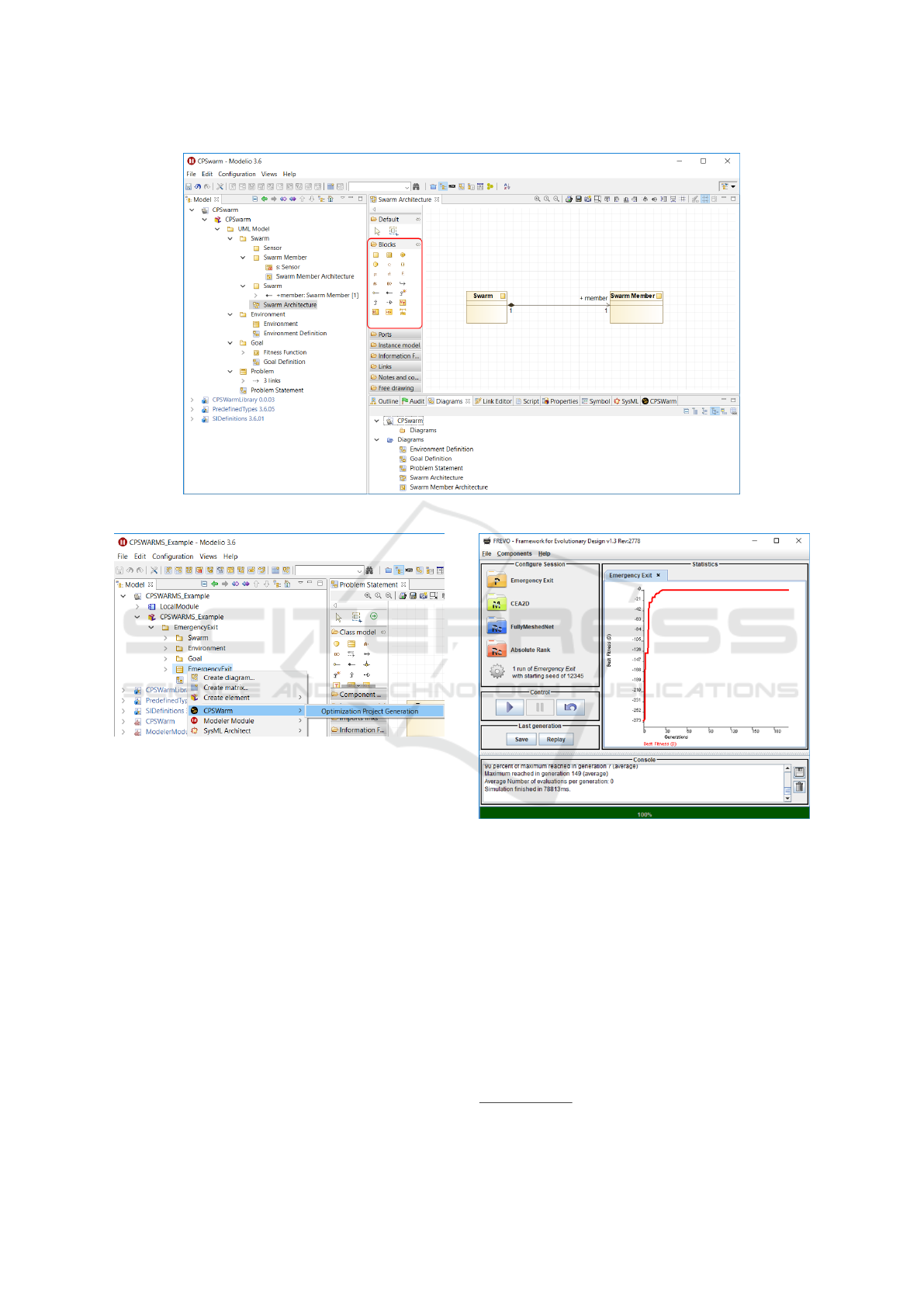
Figure 12: Swarm Member Architecture Modelling Elements.
Figure 13: Exporting the files for the optimization tool from
the design environment.
environment and to make a statistical evaluation of the
behavior using Monte-Carlo simulation over different
random seeds.
In the EmergencyExit example, parameters like
success rate or the average or worst case time until the
simulated robots have left the scene through the exits
can be used as a numeric assessment of the algorithm.
Furthermore, a graphical depiction of the simulation
can be helpful to evaluate the algorithm. The Emer-
gencyExit problem in FREVO has been implemen-
ted with a very basic simulation interface showing the
movement of agents on a grid (see Figure 15). The
EmergencyExit problem was designed as test problem
for the integration of two open source tools in our CP-
Swarm workbench. Due to the relatively simple se-
tup, the solutions to the problem were always success-
ful in leaving the area.
Figure 14: Simulation Settings of FREVO.
As mentioned in Section 4.3, it is also possible to
use FREVO with an external simulator - in this case
the Stage
6
simulator - with FREVO, as shown in Fi-
gure 16.
6 CONCLUSION
This paper has demonstrated the functionality of an
initial version of the CPSwarm workbench. The main
focus was put on the modeling and optimization part.
Therefore, the workbench integrated two open-source
tools, Modelio and FREVO. As a case study, a pro-
6
http://playerstage.sourceforge.net/index.php?src=stage
IndTrackMODELSWARD 2018 - MODELSWARD - Industrial Track
622
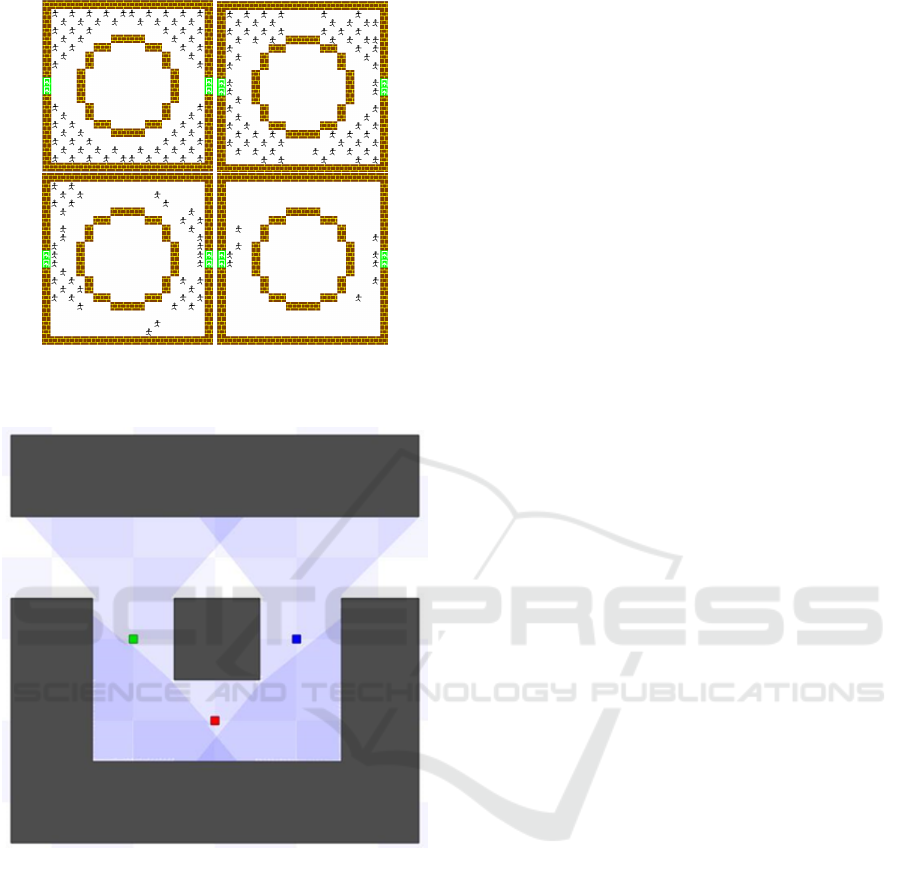
Figure 15: Replay of a simulation the EmergencyExit ex-
ample by FREVO.
Figure 16: Simulation of the EmergencyExit example with
Stage/ROS.
blem named emergency exit was chosen. In this ex-
ample a swarm of robots needs to find an exit in a un-
mapped environment and leave this room through the
exit as soon as possible. A possible scenario matching
this problem could be fire or collapsing buildings. In
the case study, the problem was first modeled using
Modelio and then exported to FREVO for optimiza-
tion. FREVO was then used to generate a possible so-
lution by applying an evolutionary search algorithm
in order to optimize the weights for an ANN. In this
work solution had been evaluated using simulation.
Future work will include an extension of the work-
bench towards deploying the generated solution on
real systems, which will involve code generation for
embedded target systems.
ACKNOWLEDGEMENTS
We would like to thank the anonymous reviewers for
their constructive comments on the submission ver-
sion of this paper. The research leading to these re-
sults has received funding from the European Union
Horizon 2020 research and innovation programme
under grant agreement No 731946, CPSwarm Project.
REFERENCES
Auer, C., W
¨
uchner, P., and de Meer, H. (2008). A met-
hod to derive local interaction strategies for impro-
ving cooperation in self-organizing systems. In Pro-
ceedings of the Third International Workshop on Self-
Organizing Systems, Vienna, Austria.
Bagnato, A., B
´
ır
´
o, R. K., Bonino, D., Pastrone, C., Elmen-
reich, W., Reiners, R., Schranz, M., and Arnautovic,
E. (2017). Designing swarms of cyber-physical sys-
tems: The H2020 cpswarm project: Invited paper. In
Proceedings of the Computing Frontiers Conference,
CF’17, pages 305–312, New York, NY, USA. ACM.
Bagnato, A., Brosse, E., Quadri, I., and Sadovykh, A.
(2015). Into-cps: An integrated tool chain for com-
prehensive model-based design of cyber-physical sys-
tems. G
´
enie Logiciel, pages 31–35.
Bagnato, A., Brosse, E., Quadri, I., and Sadovykh, A.
(2016). SysML for modeling co-simulation orches-
tration over FMI: the INTO-CPS approach. Ada User
Journal, 37(4):215–218.
Dittrich, T. and Elmenreich, W. (2015). Comparison of a
spatially-structured cellular evolutionary algorithm to
an evolutionary algorithm with panmictic population.
In Proceedings of the 12th International Workshop
on Intelligent Solutions in Embedded Systems (WI-
SES’15), pages 145–149, Ancona, Italy.
Elmenreich, W. and de Meer, H. (2008). Self-organizing
networked systems for technical applications: A dis-
cussion on open issues. In K.A. Hummel, J. S., editor,
Proceedings of the Third International Workshop on
Self-Organizing Systems, pages 1–9. Springer Verlag.
Elmenreich, W., D’Souza, R., Bettstetter, C., and de Meer,
H. (2009). A survey of models and design methods for
self-organizing networked systems. In Proceedings of
the Fourth International Workshop on Self-Organizing
Systems, volume LNCS 5918, pages 37–49. Springer
Verlag.
Larsen, P. G., Fitzgerald, J. S., Woodcock, J., Fritzson, P.,
Brauer, J., Kleijn, C., Lecomte, T., Pfeil, M., Green,
O., Basagiannis, S., and Sadovykh, A. (2016). In-
tegrated tool chain for model-based design of cyber-
physical systems: The INTO-CPS project. In 2016
2nd International Workshop on Modelling, Analysis,
and Control of Complex CPS, CPS Data 2016, Vienna,
Austria, April 11, 2016, pages 1–6.
Lee, E. A. (2008). Cyber physical systems: Design challen-
ges. In 11th IEEE International Symposium on Object
Modelling a CPS Swarm System: A Simple Case Study
623

Oriented Real-Time Distributed Computing (ISORC),
pages 363–369.
Martins, P. and McCann, J. (2017). Chapter 7 - network-
wide programming challenges in cyber-physical sys-
tems. In Song, H., Rawat, D. B., Jeschke, S., and
Brecher, C., editors, Cyber-Physical Systems, Intelli-
gent Data-Centric Systems, pages 103 – 113. Acade-
mic Press, Boston.
Sobe, A., Feh
´
erv
´
ari, I., and Elmenreich, W. (2012).
FREVO: A tool for evolving and evaluating self-
organizing systems. In Proceedings of the 1st Interna-
tional Workshop on Evaluation for Self-Adaptive and
Self-Organizing Systems, Lyon, France.
Zhevzhyk, S. and Elmenreich, W. (2015). Comparison of
metaheuristic algorithms for evolving a neural con-
troller for an autonomous robot. Transactions on Ma-
chine Learning and Artificial Intelligence, 2(6):62–
76.
IndTrackMODELSWARD 2018 - MODELSWARD - Industrial Track
624
