
Augmented Reality Object Selection User Interface for People with
Severe Disabilities
Julius Gelšvartas
1
, Rimvydas Simutis
1
and Rytis Maskeli
¯
unas
2
1
Automation Department, Faculty of Electrical and Electronics Engineering, Kaunas University of Technology,
Studentu˛ st. 50-154, Kaunas, Lithuania
2
Centre of Real Time Computer Systems, Kaunas University of Technology, Baršausko st. 59-338a, Kaunas, Lithuania
Keywords:
Augmented Reality, Projection Mapping, Calibration, Structured Light, Projector.
Abstract:
This paper presents a user interface that was designed for people with sever aging related conditions as well
as mobility and speech disabilities. Proposed user interface uses augmented reality to highlight objects in the
environment. Augmented reality is created using a projection mapping technique. Depth sensor is used to
perform object detection on a planar surface. This sensor is also used as part of a camera-projector system to
perform automatic projection mapping. This paper presents the user interface system architecture. We also
provide a detailed description of the camera-projector system calibration procedure.
1 INTRODUCTION
People suffering from severe age related conditions
such as dementia can experience mobility prob-
lems and speech pathologies. People suffering from
tetraplegia can also experience similar symptoms.
These conditions drastically impact patient’s ability to
communicate. Moreover, these patients require some
form of constant care that is both time consuming and
expensive. Often assistive technology is the only way
these patients can communicate . Efficient assistive
technologies have the potential of improving patient’s
quality of life and sometimes even reducing the need
for care.
Assistive technology is a very broad term covering
adaptive, rehabilitative and assistive devices that help
people perform tasks that they were formerly unable
to accomplish. Such system usually consist of two
parts, namely assistive devices and human computer
interaction (HCI) interface. Unfortunately, assistive
devices that are on the market today are not very effi-
cient. The efficiency of such devices can be improved
by developing specialized user interface (UI).
The primary use case of our system is selection
and manipulation of objects that are placed on a table-
top in front of the user. UI presented in this paper
consists of projector, depth camera (such as Microsoft
Kinect) and user action input device. Our system
can be used with several user action input devices,
namely sip/puff, consumer grade brain computer in-
Figure 1: Experimental setup and the example of high-
lighted object.
terface (BCI) and eye tracker devices. Depth camera
is used to automatically detect tabletop plane and ob-
jects positioned on that plane. Finally, projector is
used together with depth camera to create a camera-
projector system that performs automatic projection
mapping. This makes it possible to highlight all de-
tected objects. The user then selects the desired ob-
ject and it can be manipulated either by care giver or
a robotic arm. For example, when the user selects
a glass of juice it is grabbed by a robotic arm and
brought to users mouth so that he can drink from it.
The main goal of the assistive technology is to ei-
ther restore or substitute an ability that a patient has
lost. BCI is the best technology for restoring natu-
ral abilities, because HCI is performed by thinking.
BCI research field has had significant advances in re-
cent years. It has been shown in (Hochberg et al.,
156
Gelšvartas, J., Simutis, R. and Maskeli
¯
unas, R.
Augmented Reality Object Selection User Interface for People with Severe Disabilities.
DOI: 10.5220/0006733301560160
In Proceedings of the 4th International Conference on Information and Communication Technologies for Ageing Well and e-Health (ICT4AWE 2018), pages 156-160
ISBN: 978-989-758-299-8
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2012) that BCI systems can be used to directly con-
trol robotic arms. Similar system has been used for
patient’s limb control (Ajiboye et al., 2017). These
advances are, however, made with expensive and usu-
ally invasive BCI devices. Consumer-grade BCI de-
vices still have very limited capabilities (Maskeliunas
et al., 2016).
Systems that do not use direct limb or robotic arm
control require UI to operate. HCI efficiency directly
affect system usability. A standard way of presenting
UI to the users is by using conventional displays. This
approach is inefficient when the user is communicat-
ing or interacting with the environment. Augmented
and virtual reality have successfully been used in as-
sistive technologies and rehabilitation (Hondori et al.,
2013). Augmented reality is better suited for infor-
mation presentation, because virtual reality headset
would further separate locked in patient from the en-
vironment. Projection mapping is one of the best
ways to display augmented reality UI.
Projection mapping can either be manual or au-
tomatic. Manual projection mapping is mostly used
in entertainment and art industries where the scene is
static. The system presented in this paper uses auto-
matic projection mapping, because the environment is
dynamic and objects can change their positions. Au-
tomatic projection mapping can be performed when
the transformation between depth camera and projec-
tor optical frames is known. This transformation is
obtained by calibrating camera-projector system. One
way to calibrate camera-projector system is by using
structured-light (Moreno and Taubin, 2012). Alterna-
tively, method proposed in (Kimura et al., 2007) can
be used when the camera is already calibrated. This
paper utilized a practical calibration method proposed
in (Yang et al., 2016).
The system presented in this paper is similar to
(Benko et al., 2012), but without the accounting for
deformations caused by physical objects. More ad-
vanced dynamic projection mapping methods have
been created in recent years (Sueishi et al., 2015).
Such systems require more expensive hardware setup.
Figure 1 shows the experimental setup of the pre-
sented system.
The remaining paper is structured as follows. Sec-
tion 2 describes the proposed projection mapping
based system. The results and discussions are pre-
sented in section 3. Section 4 is the conclusion.
2 MATERIALS AND METHODS
The augmented reality UI is constructed and pre-
sented using a camera-projector system. The work
flow for setting up and calibrating the projection map-
ping system is as follows:
1. The depth camera and projector are setup in front
of the scene. The projector and camera should
be fixed sturdily to each other. Ideally the cam-
era and projector should be fixed to a common
metal frame or integrated into one housing. This
is necessary so that the extrinsic parameters cal-
culated during calibration do not change when the
system is operating. If the camera-projector sys-
tem would be integrated into a single device the
calibration process could be performed only once
i.e. factory calibration.
2. Calibration of projector-camera system is per-
formed by placing a board with circular black dot
pattern in front of projector and camera. The pro-
jector is used to show a similar white dot pattern
that appears on the same board. The camera im-
age of the board is recorded and positions of pro-
jected and real dots are estimated. To correctly es-
timate the system parameters several images with
varying board position and orientation have to be
captured. The estimates are used to calculate the
intrinsic and extrinsic parameters of the projector-
camera system.
In the camera-projector system a projector is
treated as a virtual camera device. We use a pin-
hole camera model to describe both the camera
and the projector (i.e. a virtual camera). The pin-
hole camera intrinsic parameters consist of a 3x3
camera matrix C and a 1x5 distortion coefficients
matrix D. Intrinsic parameter matrices C and D
can be combined to create a 3X4 camera projec-
tion matrix P (Hartley and Zisserman, 2003). Ma-
trix P can be used to project 3D world points in
homogeneous coordinates into an image. During
calibration we obtain two camera projection ma-
trices P
c
for camera and P
p
for projector.
Camera-projector system also has extrinsic cam-
era parameters. Extrinsic camera parameters con-
sist of translation vector T and rotation matrix
R. In our case T and R define the translation
and rotation of the projector optical origin in the
camera origin coordinate system. After calibra-
tion camera-projector system intrinsic and extrin-
sic parameters are obtained. These parameters
are used to perform automatic projection mapping
during system operation.
During the system operation depth senor is acquiring
depth images of the scene in camera optical frame
coordinate system. These images have to be trans-
formed into a projector optical frame coordinate sys-
tem. This transformation consists of the following
Augmented Reality Object Selection User Interface for People with Severe Disabilities
157

three steps:
1. The depth image is converted to a 3D point cloud.
This is achieved by re-projecting each depth im-
age pixel (u, v, Z) to 3D point (X, Y, Z, 1) in depth
camera frame. Here u and v are pixel coordinates
along image rows and columns. X and Y are 3D
point coordinates along X and Y axis in meters.
Depth image pixel values are already in meters
and are copied to 3D point Z axis coordinate. The
transformation is performed using the camera in-
trinsic parameter matrix P
c
obtained during sys-
tem calibration.
2. 3D point cloud transformation. Each 3D point is
transformed to projector frame by multiplying this
point by transformation matrix that is constructed
from camera-projector system extrinsic parame-
ters i.e. rotation matrix R and translation T .
3. Projecting point cloud into projector frame. Every
transformed 3D point is projected into projector
frame by multiplying them with projection matrix
P
p
. P
p
is the projector device projection matrix
that is obtained after calibrating camera-projector
system.
The transformed depth images are used for object
detection. After object detection pipeline finishes the
transformed depth image pixels that belong to a de-
tected object are use in projection mapping.
3 RESULTS AND DISCUSSION
The camera-projector system described in the previ-
ous section has been used to create an object selection
UI. The system architecture of this UI application can
be seen in Fig. 2. UI implementation contains the
following components:
1. Depth sensor driver is used to acquire depth im-
ages from Kinect senor. Note that other depth sen-
sors or stereo cameras can easily be integrated into
our system.
2. Tabletop detector from Object Recognition
Kitchen package (Willow Garage, 2017) is used
to perform object detection. The detector uses
depth image that has been transformed to the pro-
jector optical frame. The object detector used in
this paper has two parts, namely a table finder and
an object recognizer. The tabletop is detected as
a dominant plane in the depth image using the al-
gorithm presented in (Poppinga et al., 2008). All
points that are above the tabletop plane are used
for clustering to identify individual objects. The
remaining points are discarded. Object point clus-
ters are used to highlight the objects with projec-
tor. Each cluster is also compared to object model
database to determine the type of object. At the
moment we are not using object type and database
mesh, however this information could be used to
render more accurate object highlights.
3. User action input modality is a package that pro-
vides an interface used to abstract various action
input devices. This interface currently supports
two actions, namely selecting current object and
moving to next object in the list. Some devices
only have one action, in this case the moving to
next object is performed automatically at given in-
tervals and the user only has to select the desired
object.
This package has a well defined interface that can
be used to integrate additional assistive devices
into the system. Current system supports sip/puff
devices, eye-trackers and consumer grade BCI de-
vices.
4. Object selector keeps track of all detected ob-
jects. The object list is updated each time a new
depth image is processed. The update process re-
moves objects that have been removed from the
scene and adds new object when they appear in
the scene.
This package also maintains an index of the cur-
rent object. The current object index is updated by
actions from User action input modality pack-
age.
Finally, this package can also generate external
signals, when a particular object is selected. The
external signal can be used to display information
for caregiver. This can be done by changing the
color of highlighted object or showing notifica-
tions on a separate screen. The system could also
be integrated with additional assistive technolo-
gies. For example, generated external signal could
be used by a robotic arm controller that grasps an
object and gives it to the user.
5. Object highlight projector receives a list of
points belonging to each detected object. These
points are used to create a projection mapping im-
age that is shown by the projector. The index of
current object is received from Object selector
and this object is highlighted in different color.
The detailed description of projection mapping al-
gorithm can be found in section 2.
The proposed system could further be improved
by calculating object highlights from 3D models. The
highlight visibility could be improved by projecting
ICT4AWE 2018 - 4th International Conference on Information and Communication Technologies for Ageing Well and e-Health
158
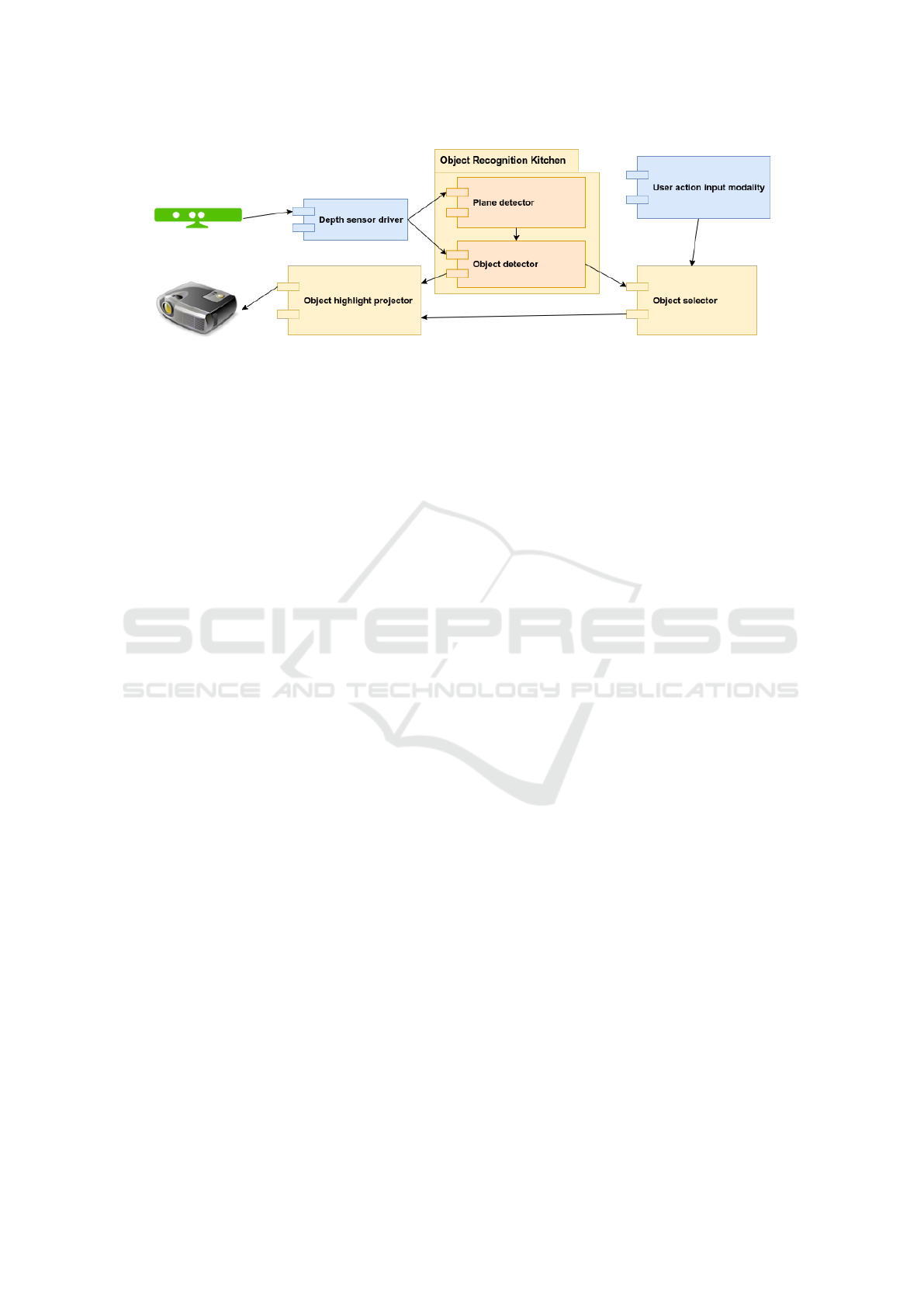
Figure 2: Object selection user interface system diagram.
animated highlights. Another option is to create high-
lights that account for object texture instead of using
single color highlight for the whole object.
Automatic projection mapping produces accurate
object highlights. Highlight visibility can sometimes
be reduced when the scene contains shiny, reflective
or transparent objects. The easiest way to overcome
these problems is to make sure that the scene contains
only diffuse objects. The proposed system will oper-
ate in a controlled environment and the correct object
choice is performed by the system setup personnel.
The proposed system could further be improved
by using a more advanced object detector. The main
requirement for an object detector is that it should de-
tect objects in disparity maps or 3D point clouds pro-
duced by depth camera.
4 CONCLUSIONS
This paper presents a UI that uses projection mapping
to highlight objects in a scene. Our system is specif-
ically designed for patients with severe disabilities.
Detailed description of the system architecture is pro-
vided. Projecting object highlights onto real objects
creates a more natural user experience, because the
user can interact with assistive UI by looking directly
into a scene. The main disadvantage of using pro-
jection mapping system is that projected light might
not be visible well in very bright environments. This
problem can be partially solved by having more pow-
erful projector.
The ideas presented in this paper could also be
used with head-up display (HUD) systems. HUD
would provide a more natural UI and would help to
avoid problems in bright environments. Available
consumer grade HUD systems, however, are very ex-
pensive, whereas projectors are widespread and af-
fordable.
ACKNOWLEDGEMENTS
This research has been supported by European co-
operation in science and technology COST Action
CA15122, Reducing Old-Age Social Exclusion: Col-
laborations in Research and Policy (ROSEnet).
REFERENCES
Ajiboye, A. B., Willett, F. R., Young, D. R., Memberg,
W. D., Murphy, B. A., Miller, J. P., Walter, B. L.,
Sweet, J. A., Hoyen, H. A., Keith, M. W., et al.
(2017). Restoration of reaching and grasping move-
ments through brain-controlled muscle stimulation in
a person with tetraplegia: a proof-of-concept demon-
stration. The Lancet, 389(10081):1821–1830.
Benko, H., Jota, R., and Wilson, A. (2012). Miragetable:
freehand interaction on a projected augmented reality
tabletop. In Proceedings of the SIGCHI conference on
human factors in computing systems, pages 199–208.
ACM.
Hartley, R. and Zisserman, A. (2003). Multiple view geom-
etry in computer vision. Cambridge university press.
Hochberg, L. R., Bacher, D., Jarosiewicz, B., Masse, N. Y.,
Simeral, J. D., Vogel, J., Haddadin, S., Liu, J., Cash,
S. S., van der Smagt, P., et al. (2012). Reach and grasp
by people with tetraplegia using a neurally controlled
robotic arm. Nature, 485(7398):372.
Hondori, H. M., Khademi, M., Dodakian, L., Cramer, S. C.,
and Lopes, C. V. (2013). A spatial augmented reality
rehab system for post-stroke hand rehabilitation. In
MMVR, pages 279–285.
Kimura, M., Mochimaru, M., and Kanade, T. (2007). Pro-
jector calibration using arbitrary planes and calibrated
camera. In Computer Vision and Pattern Recogni-
tion, 2007. CVPR’07. IEEE Conference on, pages 1–
2. IEEE.
Maskeliunas, R., Damasevicius, R., Martisius, I., and Vasil-
jevas, M. (2016). Consumer-grade eeg devices: are
they usable for control tasks? PeerJ, 4:e1746.
Moreno, D. and Taubin, G. (2012). Simple, accurate, and
robust projector-camera calibration. In 3D Imaging,
Augmented Reality Object Selection User Interface for People with Severe Disabilities
159

Modeling, Processing, Visualization and Transmis-
sion (3DIMPVT), 2012 Second International Confer-
ence on, pages 464–471. IEEE.
Poppinga, J., Vaskevicius, N., Birk, A., and Pathak, K.
(2008). Fast plane detection and polygonalization in
noisy 3d range images. In Intelligent Robots and Sys-
tems, 2008. IROS 2008. IEEE/RSJ International Con-
ference on, pages 3378–3383. IEEE.
Sueishi, T., Oku, H., and Ishikawa, M. (2015). Robust
high-speed tracking against illumination changes for
dynamic projection mapping. In Virtual Reality (VR),
2015 IEEE, pages 97–104. IEEE.
Willow Garage, R. c. (2017). Ork: Object
recognition kitchen. https://github.com/wg-
perception/object_recognition_core.
Yang, L., Normand, J.-M., and Moreau, G. (2016). Practi-
cal and precise projector-camera calibration. In Mixed
and Augmented Reality (ISMAR), 2016 IEEE Interna-
tional Symposium on, pages 63–70. IEEE.
ICT4AWE 2018 - 4th International Conference on Information and Communication Technologies for Ageing Well and e-Health
160
