
Using Amplitude Modulation for Extracting Gait Features
Abdulhakim Elkurdi, Ipek Caliskanelli and Samia Nefti-Meziani
Autonomous Systems and Advanced Robotics Centre, Salford University, Manchester, U.K.
Keywords: The Gait Analysis, Spatiotemporal Features, Amplitude Modulation, Classification Technique.
Abstract: Feature extraction for gait analysis has been explored widely over the past years. The set of static and/or
dynamic skeleton parameters which are obtained from tracking body joints (i.e. limbs and trunk) are initially
pool of gait features extraction. The challenge of gait feature extraction is to reduce the noise in the row data
which is due the computational complexity of determination of the gait cycle and sub-phases of the gait
cycle, correctly. Although marker-based motion capture systems are highly accurate, they often only used in
laboratory environments which leads to a constrained method. Alternative products such as MS Kinect
overcome the limitations of the motion capture systems by providing low-cost, moderate accuracy with
flexibility of quick installation even in residential settlements. The level of accuracy of the MS Kinect
camera for 3D skeleton points can be increased by using pre-processing techniques which helps to
overcome the jitter and nose in data. The proposed method modifies the gait walk signal using amplitude
modulation (AM) technique to extract high predictive power of gait features without the need of gait cycle
determination. Experimental results on 14 health subjects and 3 different types of walking speeds shows that
AM technique provides 100% correctly classified instances using support vector machine (SVM) and
decision tree (DT) classifiers, while 97.6% with k-nearest neighbour (k-NN) classifier.
1 INTRODUCTION
Human gait analysis is an attractive subject
especially for clinical purposes. The vision tracking
systems play a main role for tracking and monitoring
the 3D skeleton position (Clark et al., 2015).
Marker-less MS Kinect provides up to 25 joints
position during motion. However, due to the marker-
less nature of Kinect cameras cause such systems to
suffer from noise. The injected noise can be related
to various reasons such as body's parts make itself-
occlusion, relative speed of joints to data rate of the
Kinect during tracking, etc. This reduces the
accuracy of the Kinect outcome as opposed to a
marker-based motion capture system. Although the
level of accuracy is the main bottleneck for Kinect
cameras, they are cost effective and easy to install in
residential settlements (Staranowicz et al., 2015).
Recently, human computer interaction that is
based on 3D data has been used widely among of
researchers (Li et al., 2015). The objective of
building 3D skeleton-based human representations is
to extract compact, discriminative descriptions to
characterise a human’s attributes from 3D human
skeletal information.
The main goal of this research is to effectively
extract gait features from positional lower limbs
using the amplitude modulation (AM) technique in
order to classify gait speeds. The efficiency of a
classifier can be affected by the high predictive
power of the classifier, which is related to the
success of the feature extraction to define the
discrimination between the classes. The human gait
analysis is categorised under three groups as gait
kinematics, gait kinetics and electromyography (Tao
et al., 2012).
This study exploits the spatiotemporal gait
analysis which belongs to kinematic measurements
for extracting the gait features. The proposed
method is based on the 3D skeletal data, which is
called modified gait signal using AM. Consequently,
the gait features are extracted from the modified gait
signal namely, modulation index (D) and baseband
frequency of gait signal (fg). The parameters of the
modified gait signal are used for classifying the
three kinds of walk speeds (slow, normal and fast
walk speeds). In classification stage, a comparison
between DT, SVM and k-NN classifiers is
conducted and efficiency of each classifier is
evaluated based on confusion matrix and ROC curve
Elkurdi, A., Caliskanelli, I. and Nefti-Meziani, S.
Using Amplitude Modulation for Extracting Gait Features.
DOI: 10.5220/0006733601610168
In Proceedings of the 4th International Conference on Information and Communication Technologies for Ageing Well and e-Health (ICT4AWE 2018), pages 161-168
ISBN: 978-989-758-299-8
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
161
to calculate the accuracy, sensitivity, specificity and
area under curve (AUC). The experimental results
show that the extracted features using proposed AM
method is more efficient than the gait features which
are extracted using spatiotemporal gait analysis in
walking speed classification.
The rest of this paper is structured as follows.
Sec. 2 reviews the related work on spatiotemporal
gait analysis and gait features extraction, Sec. 3
covers the proposed amplitude modulation technique
for gait features extraction. The experimental setup
and results are presented in Sec. 4 and we conclude
in Sec. 5.
2 REALTED WORK
2.1 Gait Cycle Determination
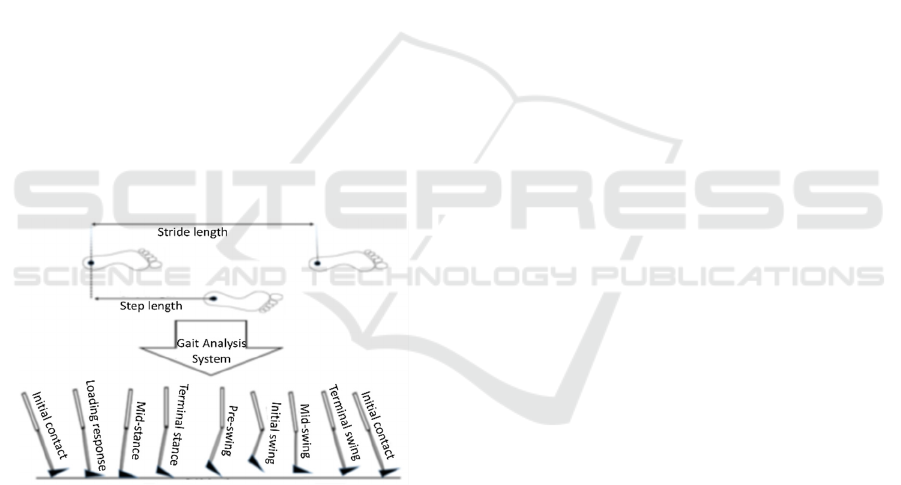
Gait cycle is defined as the distance between two
consecutive strike heels of the same leg (Tao et al.,
2012). The gait cycle composites of two main
phases; stance phase and swing phase. Fig.1
illustrates a full gait cycle with a set of sub-stages
namely initial contact, loading response, mid stance,
terminal stance, pre-swing, initial swing, toe-off,
mid swing, terminal swing.
Figure 1: Full gait cycle limited between two strike heels
of the same leg.
In (Nguyen et al., 2016 ) detects the gait cycle
from the horizontal distance between the left and
right legs during forward walking to the MS Kinect.
The author shows exactly that the maximum
distances between both legs (which correspond to
state of legs) are farthest apart, while minimum
horizontal distance between legs are closed to each
other. Another study uses a different technique to
calculate the full gait cycle is based on spectral
signal analysis and detection technique of zero-
velocity crossing (Wang et al., 2015).
2.2 Spatiotemporal Gait Parameters
The spatiotemporal gait parameters include gait
speed, gait rhythm, stride length, step length, step
width, time of single and double support stages and
duration of gait cycle (Kim & Son, 2014).
Researchers have conducted a wide range of studies
on gait parameters by collecting data from lower
body limbs. (Clark et al., 2013) uses skeletal data to
assess step time, step length, stride time, stride
length and speed gait. The results show increased
accuracy in stride length, step length and gait speed.
(Auvinet et al., 2015) calculates spatiotemporal gait
parameters based on the step length as a maximum
distance between ankles, stride length by doubling
the step length, and gait speed by using stride length
over MS Kinects data rate. The authors use these
features in biometric recognition using three
different classifiers. (Dolatabadi et al., 2014)
determine the two main phases of gait cycle (stance
and swing) automatically from the movement of the
ankle joint in the z-axis.
The spatiotemporal gait features can be
calculated accordingly as the following equations
illustrate:
(1)
(2)
(3)
(4)
(5)
_
∩
(6)
/
(7)
(8)
Where
is the maximum distance between
two heel's strikes in horizontal direction, i is the
number of frames, HS is the heel strike, R for right
foot, L for left foot and TO is the toe off, time
represents time taken for the process whereas length
is the distance covered by the skeletal joint motion
during the walk as Fig.2 illustrates.
ICT4AWE 2018 - 4th International Conference on Information and Communication Technologies for Ageing Well and e-Health
162
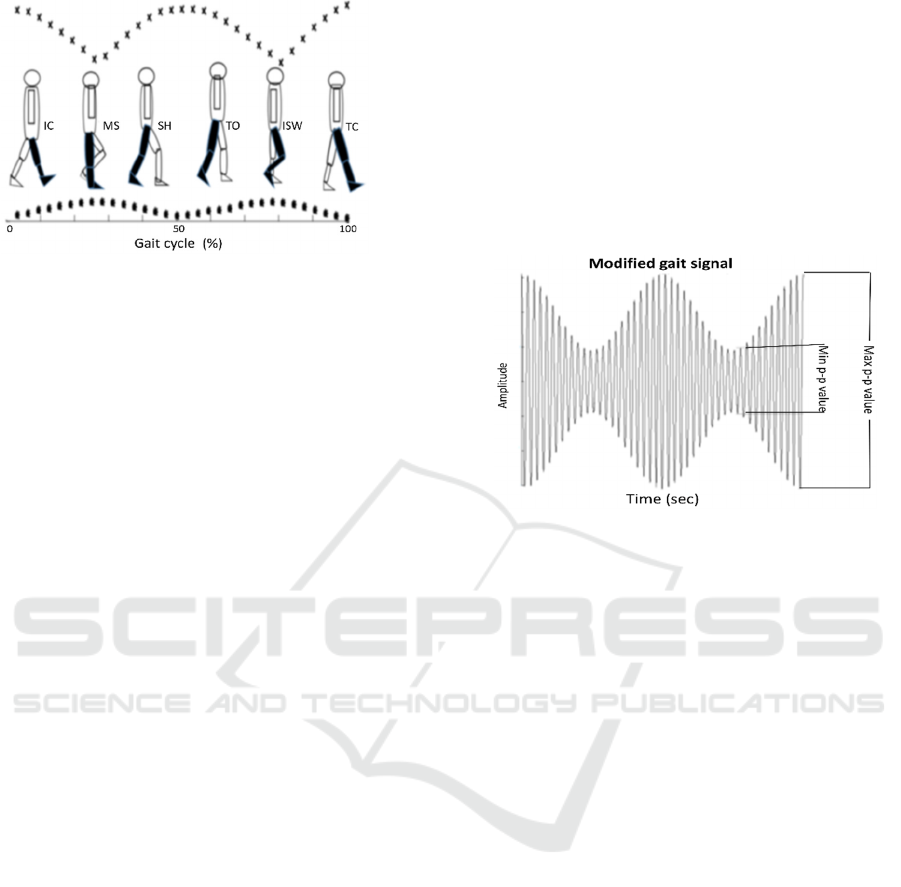
Figure 2: Detection of a complete gait cycle by tracking
the distance between the left and right ankle joints (the top
curve), and tracking the vertical displacement of the left
and right hips (the bottom curve). The gait cycle contains;
initial contact (IC), mid stance (MS), strike heel (SH), toe
off (TO) and initial swing stages (ISW).
2.3 Classification Technique
Data classification techniques have been used in
many different fields including human gait
classification, representation and recognition using
MS Kinect. In classification stage, researchers use
different classifiers. The Nave Bayes Neural
Network (NBNN) classifier is used in (Yang & Tian,
2012) for classifying the human actions using the
skeleton data from MS Kinect. (Andersson & de
Araújo, 2015) uses three types of classifiers for gait
attributes using MS Kinect, the authors achieved the
highest level of accuracy with SVM classifier,
followed by k-NN classifier, and then with the MLP
classifier. In (Arai & Asmara, 2014), 3D skeletal
model is extracted by using MS Kinect video data to
classify gait gender, and the result shows that
83.75% and 76.25% classification rate using SVM,
Nave Bayes, respectively.
3 PROPOSED METHOD
3.1 Modified Gait Signal in Time
Domain
The modified signal is generated by
multiplication of the reference signal to the gait
signal g(t) for obtaining the relationship as in (9).
The reference signal is chosen as a sinusoidal signal
with fixed parameters (Ac 1m,
7.5Hz),
these values let the spectrum of signals in the medial
of the graph; this is related to the sensor data rate.
While, gait signal g(t) is generated from the
horizontal distance between ankles during walk.
M
t
Ac
1 D. gt
cos w
t
(9)
Where, D is the depth of modification and can be
written as:
/
(10)
Where Ag is the amplitude of the gait signal, which
can be substituted by [ 1/2 (_) - 1/2
(_) ], while the amplitude of reference signal
Ac can be replaced by [ 1/2 (_) + 1/2
(_)], as Fig. 3 shows.
Figure 3: Modified gait signal using AM technique in time
domain.
Finally, the depth of modification (D) in
percentage can be obtained by dividing the
amplitude of gait signal (Ag) over the amplitude of
the reference signal (Ac), see (11).
_
_
/
_
_
100%
(11)
The modification depth (D) is extracted from
for three different kinds of walking speeds, as
described in Algorithm 1.
Algorithm 1. Depth Modification (D):
Input:
Input 1 = Gait signal
Input 2 = Reference signal
Processing & Output:
D = Input1 amplitude
Input2 amplitude
while i <= N do
IF Speed = = Slow walk
then D-slow = D
else IF Speed = Normal walk
then D-normal = D
else
Speed = Fast walk
then D-fast = D
end IF
end while
Using Amplitude Modulation for Extracting Gait Features
163
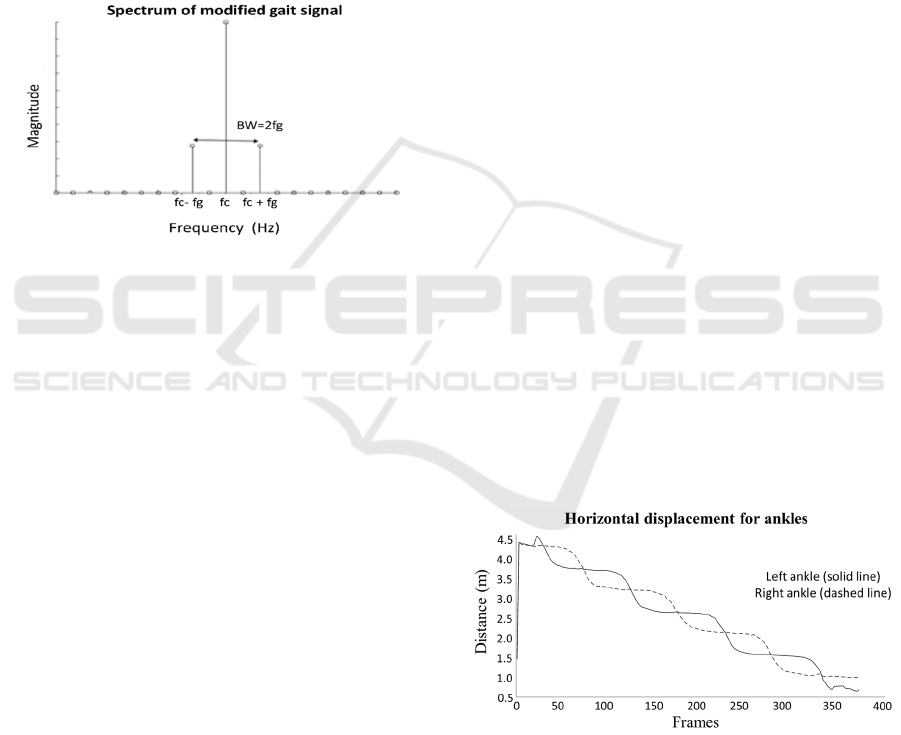
3.2 Modified Gait Signal in frequency
Domain
The spectrum of the modified gait signal on the
frequency domain is achieved by using Fast Fourier
Transformer to analyse the complex signal to its
original components. The spectrum of modified gait
signal consists of three components, namely upper
side band component which has the highest
frequency
+
), lower side band component
which located at the lowest frequency (
-
), and
the middle component which is at
, as shown in
Fig.4.
Figure 4: The spectrum of modified gait signal in
frequency domain.
The spectrum of modification signal is extracted
by using (9) which yields (12).
M
t
A
cos w
tA
cos w
t g
t
12
Where, the is the gait signal, and can be
written as,
, to obtain the
following equation:
.
13
Finally, by using the multiplication concept of
cosine functions in (13), the components of the
modified gait signal is formed as in (14). Where, the
angular frequencies
, and
is simplified into
,
and
respectively.
1/2
cos
1/2
cos
(14)
Where
, is the frequency of the carrier signal,
which is always constant, while
is the frequency
of the gait signal which varies according to the
number of gait cadence per a certain period of time.
Algorithm 2 describes the baseband frequency
implementation in detail which is related to the gait
speed.
Algorithm 2. Baseband frequency (fg):
Input:
Input 1 = Gait signal @ fg
Input 2 = Reference signal @ fc
Processing & Output:
fg = BW/2
while I <= N do
For Speed = Slow walk do
IF (fc+fg @ max3) > fc @ max2 > (fc-
fg
@ max1)
then f_slow = (fc+fg)-(fc-fg)
end IF
For Speed = Normal walk do
IF (fc+fg @ max3) > fc @ max2 > (fc- fg
@ max1)
then f_normal = (fc+fg)-(fc-fg)
end IF
For Speed = Fast walk do
IF (fc+fg @ max3) > fc @ max2 > (fc- fg
@ max1)
then f_fast = (fc+fg)-(fc-fg)
end IF
end while
4 EXPERIMENTAL RESULTS
4.1 Gait Signal Generation
The proposed method is developed using Matlab and
tested on 14 healthy subjects who were instructed to
walk in the front a MS Kinect. Each subject
performed three types of walk speeds: slow, normal
and fast walk. The positional data of left and right
ankles is collected in each trial for all subjects as
shown in Fig.5.
Figure 5: The horizontal movement data of left/ right
ankles.
The horizontal distance between ankles during
walk can generate the gait signal which is mentioned
as unmodified signal as can be seen in Fig.6,
where the maximum value of represents the
gait step length in meter.
ICT4AWE 2018 - 4th International Conference on Information and Communication Technologies for Ageing Well and e-Health
164
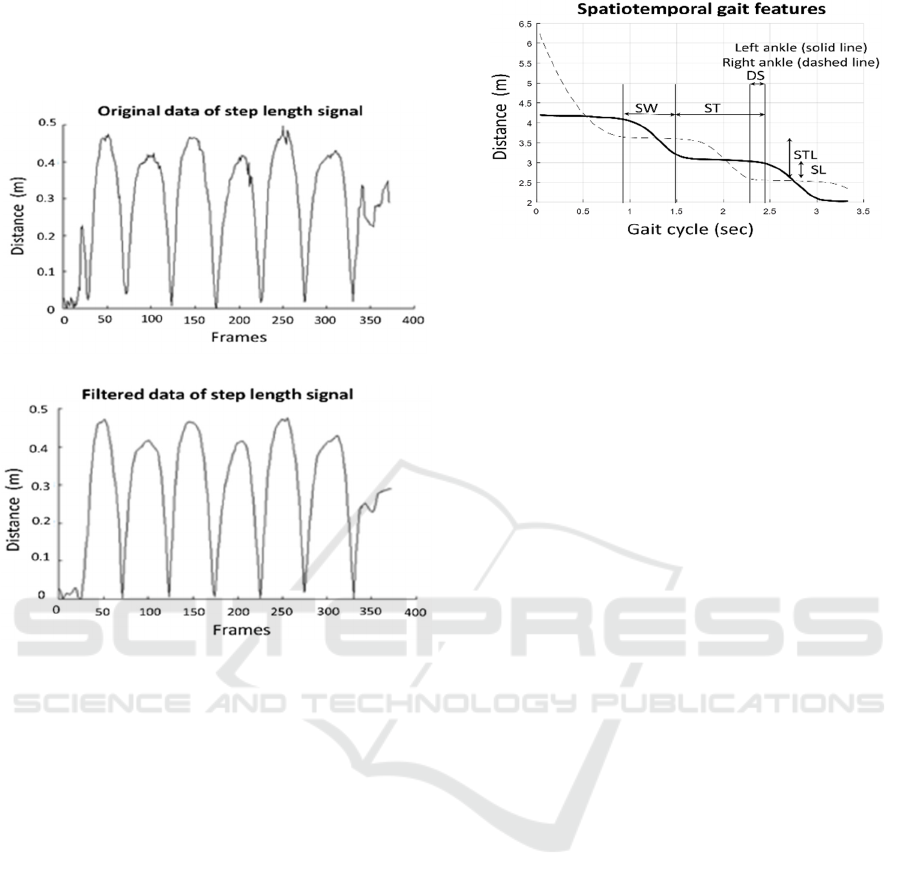
The RLOESS filter is used for smoothing the
row joints position data. Fig.6 illustrates the
difference between the row data in Fig.6 (a) versus
the smoothed data in Fig.6 (b).
(a)
(b)
Figure 6: The step length signal: (a) original data; (b)
filtered data.
4.2 Features Extraction
A complete and consistent gait analysis commonly
requires the cycle gait determination, which can be
divided into two phases; the stance and swing
phases. Two different methods are used for
extracting the gait features; both methods have been
based on the lower limbs displacement data
(positional data) to determine the gait features in
three different kinds of the walking speeds. Method
1: spatiotemporal gait analysis based on the gait
displacement signal. Method 2: proposed AM
method based on the modified gait displacement
signal.
The former method is used for extracting eleven
gait features; step length, stride length, step width,
left and right swing phase time, left and right stance
phase time, gait cycle time, double support phase
time, gait cadence and speed. These features are
extracted by using equations (1-8) for all subjects in
three different kinds of walk as shown in Fig. 7.
Figure 7: The determination of a complete gait cycle for
extracting the step length (SL), stride length (STL), double
support time (DS), swing time (SW), stance time (ST) and
gait cycle time (SW+ST).
The latter method is used for extracting two
parameters of the gait signal by modifying the gait
signal using the AM technique. The modified gait
signal can be represented in time domain to extract
the modulation depth (D), which represents the ratio
for the amplitude of the gait signal to the amplitude
of the reference signal. The second parameter of the
modified gait signal is the baseband frequency of the
gait signal (fg) which can be extracted by
representing the modified gait signal on frequency
domain.
The baseband frequency (fg) can be found either
in the lower or the upper side band component. The
gait features have been extracted for all subjects on
three types of walk speeds, as can be seen in Fig.8,
Fig.9 and Fig.10.
4.3 Classification and System
Evaluation
In this set of experiments, the extracted gait features
have been categorised into two groups relating to the
method that is used for extracting the gait features;
the first set of data is extracted the gait cycle using
spatiotemporal gait analysis, whilst the second set of
data is extracted by using the proposed AM
technique.
The first data set including step length, stride
length, stance phase time, swing phase time, double
support phase time, cadence, and speed gait, the
second data set include modulation index and
baseband frequency of modified gait signal. DT,
linear SVM, non-linear SVM, and k-NN classifiers
are compared and we investigate the high predictive
power of features. The task of a classifier is to
predict three kinds of walking speeds in three classes
(C1, C2 and C3) as listed in Table 1 for
spatiotemporal gait analysis and Table 2 for the
proposed AM method, respectively.
Using Amplitude Modulation for Extracting Gait Features
165

(a)
(b)
Figure 8: Modified gait signal during slow walk (a)
Time domain representation. (b) Frequency domain
representation.
(c)
(d)
Figure 9: Modified gait signal during normal walk (c)
Time domain representation. (d) Frequency domain
representation.
(e)
(f)
Figure 10: Modified gait signal during fast walk (e)
Time domain representation. (f) Frequency domain
representation.
ICT4AWE 2018 - 4th International Conference on Information and Communication Technologies for Ageing Well and e-Health
166
Table 1: Result of four different classifiers for spatiotemporal gait analysis method in three different kinds of walking
speeds, the sensitivity and specificity are calculated for: slow speed (C1), normal speed (C2) and fast speed (C3).
Classifiers
Sensitivity Specificity Accuracy (%)
C1 C2 C3 C1 C2 C3
Decision Tree 1 1 1 1 1 1 100
Nonlinear SVM 1 0.93 0.93 1 0.93 0.93 97.6
Linear SVM 1 0.86 0.93 1 0.96 0.93 95.2
k-NN 1 0.93 0.93 1 0.96 0.96 95.2
Table 2: Result of four different classifiers for spatiotemporal gait analysis method in three different kinds of walking
speeds, the confusion matrix and AUC curve are calculated for: slow speed (C1), normal speed (C2) and fast speed (C3).
Classifiers
Confusion matrix AUC Overall error
(%)
C1 C2 C3 C1 C2 C3
Decision Tree 0 0 0 1 1 1 0
Nonlinear SVM 0 0 7.1 1 1 0.982 2.4
Linear SVM 0 0 14.3 1 1 0.997 4.8
k-NN 0 0 14.3 1 0.964 0.982 4.8
Table 3: Result of four different classifiers for modified gait signal technique in three different kinds of walking speeds, the
sensitivity and specificity are calculated for: slow speed (C1), normal speed (C2) and fast speed (C3).
Classifiers
Sensitivity Specificity Accuracy (%)
C1 C2 C3 C1 C2 C3
Decision Tree 1 1 1 1 1 1 100
Nonlinear SVM 1 1 1 1 1 1 100
Linear SVM 1 1 1 1 1 1 100
k-NN 1 0.93 1 0.94 1 1 97.6
Table 4: Result of four different classifiers for modified gait signal technique in three different kinds of walking speeds, the
confusion matrix and AUC curve are calculated for: slow speed (C1), normal speed (C2) and fast speed (C3).
Classifiers
Confusion matrix AUC Overall error
(%)
C1 C2 C3 C1 C2 C3
Decision Tree 0 7.1 0 1 1 1 0
Nonlinear SVM 0 0 0 1 1 1 0
Linear SVM 0 0 0 1 1 1 0
k-NN 0 7.1 0 0.982 0.964 1 2.4
4.4 Discussion
Sensitivity, specificity, accuracy, overall error,
confusion matrix and AUC have been shown for
various classifiers which used in this paper. It is
noticeable that the Decision Tree (DT) classifier
achieves the best results in both techniques with
accuracy 100% as shown in tables' result. In
addition, the sensitivity and specificity have been
shown high predictive result with class one which
represents the slow walking speed for both
techniques, they reached 1. This means the ability of
classifiers to sense the positive value correctly
(sensitivity), and ability to select the negative value
correctly (specificity). Moreover, the classification
accuracy for the proposed method showed higher
result than spatiotemporal gait analysis, where the
former method reached 100% with three different
classifiers, while the latter method reached 100%
just with DT classifier as shown in tables (1 & 3).
However, the k-NN classifier showed the lowest
classification accuracy in both techniques, but still
the proposed method has better result than another
method as 97.6% and 95.2%, respectively.
In tables (2 & 4), AUC evaluation metric showed
better results with the modified gait signal technique
than the spatiotemporal gait method, where the
proposed method reached 1 with three types of
classifiers, while the spatiotemporal analysis method
reached 1 just with decision tree classifier for all
classes. The confusion matrix used to calculate the
false negative rate reported only 7.1% with AM
Using Amplitude Modulation for Extracting Gait Features
167

method, and 14.3% with spatiotemporal gait
analysis.
5 CONCLUSIONS
In this paper, we study the concept of classifying the
assessment of three types of gait speeds by using 3D
human skeleton for lower joints' body position
which is captured by a Kinect v2 sensor. We
propose
an enhanced gait features extraction which is based
on a positional lower joints data without the
requirement of the gait cycle determination.
The proposed method shows high classification
accuracy using several classifiers in comparison to
spatiotemporal gait features method. The high
predictive power of classifier can be related to the
extracted features which are based on the modified
gait signal that was generated by amplitude
modulation technique. In the system evaluation, the
confusion matrix and receiver operating
characteristics (ROC) curve is used for calculating
the accuracy, sensitivity, specificity and area under
curve (AUC). The proposed method increased
classification efficiency as opposed to
spatiotemporal gait analysis which uses evaluation
metrics (accuracy, sensitivity and specificity) to
evaluate each classifier's result.
ACKNOWLEDGEMENTS
We thank Libyan government for supporting this
research financially.
REFERENCES
Nguyen, T. N., Huynh, H. H. and Meunier, J., 2016.
Skeleton-Based Abnormal Gait Detection. Sensors,
16(11), p.1792.
Andersson, V. O. and de Araújo, R. M., 2015, January.
Person Identification Using Anthropometric and Gait
Data from Kinect Sensor. In AAAI (pp. 425-431).
Arai, K. and Asmara, R. A., 2014. Human Gait Gender
Classification using 3D Discrete Wavelet Transform
Feature Extraction. International Journal of Advanced
Re-search in Artificial Intelligence, 3(2), pp.12-17.
Auvinet, E., Multon, F. and Meunier, J., 2015. New lower-
limb gait asymmetry indices based on a depth camera.
Sensors, 15(3), pp.4605-4623.
Dolatabadi, Elham., Babak, Taati, P. and Alex, Mihailidis,
P., 2014. Vision-based approach for long-term
mobility monitoring: Single case study following total
hip replacement. Journal of rehabilitation research
and development, 51(7), p.1165.
Clark, R. A., Bower, K. J., Mentiplay, B. F., Paterson, K.
and Pua, Y.H., 2013. Concurrent validity of the
Microsoft Kinect for assessment of spatiotemporal gait
variables. Journal of biomechanics, 46(15), pp.2722-
2725.
Clark, R. A., Vernon, S., Mentiplay, B. F., Miller, K. J.,
McGinley, J. L., Pua, Y.H., Paterson, K. and Bower,
K.J., 2015. Instrumenting gait assessment using the
Kinect in people living with stroke: reliability and
association with balance tests. Journal of
neuroengineering and rehabilitation, 12(1), p.15.
Kim, C. J. and Son, S. M., 2014. Comparison of
spatiotemporal gait parameters between children with
normal development and children with diplegic
cerebral palsy. Journal of physical therapy science,
26(9), pp.1317-1319.
Li, S. Z., Yu, B., Wu, W., Su, S. Z. and Ji, R. R., 2015.
Feature learning based on SAE–PCA network for
human gesture recognition in RGBD images.
Neurocomputing, 151, pp.565-573.
Yang, X. and Tian, Y. L., 2012, June. Eigenjoints-based
action recognition using naive-bayes-nearest-neighbor.
In Computer vision and pattern recognition workshops
(CVPRW), 2012 IEEE computer society conference
on (pp. 14-19). IEEE.
Tao, W., Liu, T., Zheng, R. and Feng, H., 2012. Gait
analysis using wearable sensors. Sensors, 12(2),
pp.2255-2283.
Wang, Q., Kurillo, G., Ofli, F. and Bajcsy, R., 2015,
October. Unsupervised temporal segmentation of
repetitive human actions based on kinematic modeling
and frequency analysis. In 3D Vision (3DV), 2015
International Conference on (pp. 562-570). IEEE.
Staranowicz, A. N., Ray, C. and Mariottini, G. L., 2015,
August. Easy-to-use, general, and accurate multi-
Kinect calibration and its application to gait
monitoring for fall prediction. In Engineering in
Medicine and Biology Society (EMBC), 2015 37th
Annual International Conference of the IEEE (pp.
4994-4998). IEEE.
ICT4AWE 2018 - 4th International Conference on Information and Communication Technologies for Ageing Well and e-Health
168
