
Capacitated Arc Routing Problem over Sparse Underlying Graph under
Travel Costs Uncertainty
Sara Tfaili
1
, Abdelkader Sbihi
2
, Adnan Yassine
1
and Ibrahima Diarrassouba
1
1
Laboratoire de Math
´
ematiques Appliqu
´
ees du Havre, Universit
´
e Le Havre Normandie,
25 Rue Philippe Lebon, Le Havre, France
2
ESCEM,
´
Ecole de Management, Tours, France
Keywords:
Sparse Graph, Robust Optimization, Multiple Scenarios.
Abstract:
In this paper, we study the capacitated arc routing problem over sparse underlying graphs under travel costs
uncertainty. In particular, we work with Multiple-Scenario Min-Max CARP over sparse underlying graphs.
We present a mathematical formulation of the problem. A greedy heuristic algorithm and an adapted tabu-
search algorithm are developed to solve the problem. The computational experiments show the effectiveness
of these two algorithms for different sizes of instances as well for different number of scenarios.
1 INTRODUCTION
Combinatorial optimization requires the advance kno-
wledge of the data and the parameters of the problem.
However, real life applications may have a high de-
gree of uncertainty and thus any disturbance of the
input data may affect the nature of the solution to
be not optimal or even infeasible. In our study and
mainly in the field of routing problems, such pertur-
bations may appear in the uncertainty of travel times
due to traffic for example (Sungur et al., 2008), re-
quired demands by clients, arrivals of new clients or
even in the travel costs. In particular, we are inte-
rested in studying the sparse Capacitated Arc Routing
Problem (CARP) with uncertain travel costs, and this
requires to study the problem in the terms of theore-
tical and practical issues by investigating the exten-
sions of the sparse CARP under uncertain data. Mo-
deling the uncertainty in the problems of optimization
has been done by several methods, and stochastic pro-
gramming could be considered to be the most famous
among these methods. In stochastic programming,
the uncertain data is modeled as random variable with
known probability distribution (Wets, 2002; Shapiro
et al., 2009). The stochastic nature of the uncertain-
ties and the possibility of identifying the probability
distribution are two main conditions to apply the sto-
chastic programming. However, the nature of the un-
certainty is not always stochastic and it is not always
possible to identify the probability distri bution of the
data. Unto now, most of such studies are done with
stochastic programming (Fleury et al., 2004). A
Branch-and-Price algorithm for the capacitated arc
routing problem with stochastic demands has been
presented (Christiansen et al., 2009), and another
study is given in (Mei et al., 2010). As a consequence
of the difficulty of attaining both conditions of sto-
chastic programming, an alternative of the latter must
be sought. Such alternative is the robust optimiza-
tion which finds robust solutions that remain feasible
upon facing unpleasant impacts which are caused by
the ambiguity or the imprecision of the input data.
This paper is organized as follows. In Section 2 we
give a brief review about the robust optimization (de-
finitions and criteria). We introduce a min-max mat-
hematical model of our problem, a heuristic algorithm
and an adapted and metaheuristic algorithm to de-
termine a solution of the problem and improve it in
Section3 . Computational experiments are performed
in Section 4. Conclusions are drawn out in Section 5.
2 REVIEW ABOUT ROBUST
OPTIMIZATION
Starting from the definition of the word “robust”
which means strong, robust optimization is sufficient
to give a solution that is strong enough to face any dis-
ruption in the data. The data may be exposed to some
unpredictability especially in future, and this may af-
fect the optimal solution that is computed before to
144
Tfaili, S., Sbihi, A., Yassine, A. and Diarrassouba, I.
Capacitated Arc Routing Problem over Sparse Underlying Graph under Travel Costs Uncertainty.
DOI: 10.5220/0006751001440151
In Proceedings of the 7th International Conference on Operations Research and Enterprise Systems (ICORES 2018), pages 144-151
ISBN: 978-989-758-285-1
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

be at last infeasible or not optimal. Thus a robust so-
lution is a solution that resists as much as possible
disturbances. When the uncertain data has a probabi-
listic description, robustness can be attained by using
the stochastic optimization which has been given in
(Dantzig and Ramser, 1959). However, this type of
programming has two drawbacks:
1. The underlying probability distributions must be
already known and this is not always the case.
2. The solutions can become infeasible upon facing
some random events or disruptions.
To avoid these drawbacks, robust optimization which
is not stochastic but rather deterministic and set-based
is considered to be a suitable framework. The aim of
such optimization is to optimize the worst case value
under all uncertain data. In our work, we represent
the uncertain data by generating discrete scenarios.
Robustness criteria include several families where the
decisions can be made according to min-max, min-
max regret, min-max relative regret and lexicographi-
cal min-max, etc. For more details about different
robustness criteria, the reader may refer to (Coco et
al., 2014;; Kouvelis and Yu, 1997; Kasperski and
Zieli
´
nski, 2011). The robustness criterion which we
follow is the min-max criterion in which we minimize
the cost whenever the worst scenario occurs.
3 CAPACITATED ARC ROUTING
PROBLEM UNDER
UNCERTAINTY
In the following, we study the capacitated arc routing
problem over sparse underlying graphs and we design
new algorithms that can find more robust solutions.
The uncertain capacitated arc routing problem that
we study is characterized by the uncertainty in the
travel costs and by the sparse network for which it
is defined over. This uncertainty is represented by a
finite set of scenarios where each required edge of
the network has a different cost with respect to each
scenario. We aim at determining a robust solution i.e.
in an uncertain environment, the problem objective is
no longer to find a single global optimal solution, but
to find a solution with the best expected quality under
all possible environments. We present a mathematical
modeling of the capacitated arc routing problem over
sparse graph under travel costs uncertainty. In other
terms, we are concerned with the Multiple-Scenario
Min-Max Capacitated Arc Routing Problem in sparse
graphs which has a number of vertices equal to n,
number of edges equal to m = n + α with 1 ≤ α ≤
n
2
,
number of required edges equal to r and the
maximum vertex degree held in G is 3.
3.1 A Brief Survey about CARP
One of the most important variants of the arc rou-
ting problem is the Capacitated Arc Routing Problem.
This problem is NP-hard, and we recall here the de-
finition of it which can be stated as follows: Given a
connected undirected graph G = (V,E,C, D), where C
is a cost matrix and Q is a demand matrix, and given
a number of identical vehicles each with capacity Q
(where Q ≥ maxd
e
,e ∈ E). Find a number of tours
such that:
1. Each arc with positive demand is serviced by ex-
actly one vehicle.
2. The sum of demands of those arcs serviced by
each vehicle does not exceed Q.
3. The total cost of the tours is minimized.
3.2 Mathematical Formulation
Throughout the following, let G = (V, E) be a graph
where V denotes the set of vertices and E the set of
edges. Denote by R ⊆ E the set of the required edges
i.e. the set of edges having strictly positive demands
to be serviced. Consider the following notations and
variables:
• K: the total number of the vehicles.
• Q: the capacity of each vehicle.
• dem(e): the demand of the edge e.
• ∆
accum
(e): the total demand served by the vehicle
arriving at the service e including the demand of
e itself which is by definition less than or equal to
Q.
• c
s
e
: the cost of the edge e.
• N(e): the neighborhood of the edge e i.e. the set
of adjacent edges to e.
• S =
{
1,2,. ..,P
}
: the set of scenarios.
• ω
e
: the capacity of edge e i.e. the maximum num-
ber of times for which an edge can be traversed.
• x
e
0
, f
0
e, f
: a binary variable which is equal to 1 if and
only if the service at f
0
is successive to the service
at e
0
by the same vehicle, and the chosen shortest
path between e
0
and f
0
includes the consecutive
adjacent edges e and f , and 0 otherwise.
• y
e
0
, f
0
: a binary variable equal to 1 if f
0
is serviced
directly after e
0
, and 0 otherwise.
Capacitated Arc Routing Problem over Sparse Underlying Graph under Travel Costs Uncertainty
145

Recall that the graphs which we are working
over are sparse with maximum degree equal to 3.
Denote by 0 and 1 two incident edges to the depot
node. The edge 0 denotes the edge of departure of
the vehicle i.e. exit from the depot, and 1 denotes the
edge of returning back of the vehicle i.e. entrance
to the depot after accomplishing all the services of
the corresponding vehicle. Moreover, we assume
that these edges are required but with a null demand.
Note that this model is adapted to all CARP in any
network, but it is adaptable to our sparse network
as it respects the criteria of generating these networks.
minmax
s∈S
∑
e
0
, f
0
∈R,e∈E, f ∈N(e)
c
s
e
x
e
0
, f
0
e, f
(1)
Subject to
y
e
0
, f
0
+ y
f
0
,e
0
≤ 1 ∀e
0
, f
0
∈ R (2)
∑
f
0
∈R
y
0, f
0
= K (3)
∑
f
0
∈R
y
1, f
0
= 0 (4)
∑
e
0
∈R
y
e
0
,1
= K (5)
∑
f
0
∈R
y
e
0
,0
= 0 (6)
∑
f
0
∈R
y
e
0
, f
0
= 1 if e
0
6= {0, 1} (7)
∑
e
0
∈R
y
e
0
, f
0
= 1 if f
0
6= {0, 1} (8)
∆
accum
( f
0
) ≥ ∆
accum
(e
0
) + dem( f
0
)
+(dem( f
0
)+Q) ×(y
e
0
, f
0
−1) ∀e
0
, f
0
∈ R,e
0
6= f
0
(9)
∑
f ∈N(e)
x
e
0
, f
0
e, f
−
∑
f ∈N(e)
x
e
0
, f
0
f ,e
= 0 if e 6= e
0
,e 6= f
0
,e
0
, f
0
∈ R
(10)
∑
f ∈N(e)
x
e
0
, f
0
e, f
−
∑
f ∈N(e)
x
e
0
, f
0
f ,e
= y
e
0
, f
0
if e = e
0
,e
0
, f
0
∈ R
(11)
∑
f ∈N(e)
x
e
0
, f
0
e, f
−
∑
f ∈N(e)
x
e
0
, f
0
f ,e
= −y
e
0
, f
0
if e = f
0
,e
0
, f
0
∈ R
(12)
∑
e
0
, f
0
∈R, f ∈N(e)
x
e
0
, f
0
e, f
≤ ω
e
with ω
e
≥ 1 if e 6= 0
(13)
∑
e
0
, f
0
∈R, f ∈N(0)
x
e
0
, f
0
0, f
= K (14)
∑
e
0
, f
0
∈R, f ∈N(e)
x
e
0
, f
0
f ,e
≤ ω
e
with ω
e
≥ 1 if e 6= 1
(15)
∑
e
0
, f
0
∈R, f ∈N(1)
x
e
0
, f
0
f ,1
= K (16)
x
e
0
, f
0
e, f
,y
e
0
, f
0
∈
{
0,1
}
,∆
accum
(e
0
) ≤ Q ∀e
0
, f
0
∈ R,e, f ∈ E
(17)
The objective function (1) aims to minimize the total
costs under the worst case. Constraints (2) are tri-
vial to show that either e
0
is serviced before f
0
or vice
versa. Constraints (3) to (6) show that all the vehi-
cles must depart from the depot and all the vehicles
must return back to the depot after serving the requi-
red edges. The number of predecessors and the num-
ber of successors is given by the constraints (7) and
(8). Constraints (9) assure that if f
0
is served directly
after e
0
, then the total demand done at the level of f
0
is greater than or equal to the total demand done at e
0
.
Otherwise, the difference between these demands is
less than Q which is trivial. Shortest path constraints
are represented from (10) to (12). Constraints (13) to
constraints (16) determine the capacity of each edge
in G i.e. the maximum number of times an edge can
be traversed, where this capacity is some ω for edges
different from depot, and it is K for the edges which
are incident to the depot to assure the passage of all
the vehicles from and into the depot. Decision varia-
bles constraints are given in (17).
3.3 Efficient Algorithms for Solving
Robust Sparse CARP
In this part, we present a heuristic algorithm for sol-
ving the robust sparse capacitated arc routing problem
under travel costs uncertainty. The initial solution
which is obtained by this algorithm is then amelio-
rated by a well adapted tabu search algorithm.
3.3.1 A Heuristic Algorithm for Solving the
Robust Sparse CARP under Travel Costs
Uncertainty
This heuristic ends with a feasible initial solution of
the problem. The procedure locates a worst scenario
¯
S
and computes Z(
¯
X) = max
x
∑
c
¯
S
e
x
e, f
. Let e
1
,e
2
,... , e
r
be the required edges, and denote by λ
i
the efficiency
of each edge e
i
which is given by the formula
λ
i
=
∑
s∈S
c
s
e
i
dem(e
i
)
, (18)
where dem(e
i
) denotes the demand of the required
edge e
i
. This algorithm is valid for the two cases of
ICORES 2018 - 7th International Conference on Operations Research and Enterprise Systems
146
ω = 1, where each edge can be traversed one only
time, and ω > 1, where there is a constant maximal
number for traversing an edge. The only difference
between the two cases lies mainly in the function
U pdate.
Algorithm GH (Greedy Heuristic)
Input: A Robust CARP Instance
Output: A feasible solution
¯
X and the corresponding
worst scenario
¯
S
Initialization
0. E = R ∪ NR; |E| = n + α;
R = {e
1
,e
2
,e
3
,... , e
r−1
,e
r
};
NR = { f
1
, f
2
,... , f
m−r
};
1. For j = 2 to r − 1 Do
Sort the required edges in the non-decreasing order of
the efficiencies λ
e
j
;
End For
2. Set
¯
X ← 0; Z(
¯
X) = +∞;
¯
S = 1
Main Steps
1. k ← 1.
2. While (R <> φ} and k <= K) Do
3. ∆ ← dem
e
2
; j ← 3; P(1) ← e
1
;P(2) ← e
2
;i ← 3;
P ← {e
1
,e
2
};
4. While ((∆ <= Q) and j < r) Do
5. Subpath(e
j
);
6. End While
7. P(i) ← e
r
;
8. dim P ← i;
9. l(i) ← dim P;
10. Complete(P);
11.
¯
X ←
¯
X ∪ P;
12. Let
¯
S = max
1≤s≤|S|
{Z
s
(
¯
X)};
13. U pdate(R, NR);
14. k ← k + 1;
15. End While
16. Exit with a feasible solution
¯
X and with
the corresponding worst scenario
¯
S
Figure 1: A Greedy Heuristic Algorithm for determining a
starting feasible solution of the Robust CARP
1. If (∆ + dem
e
j
<= Q) then
2. ∆ ← ∆ + dem
e
j
;
3. P(i) ← e
j
;
4. P ← P ∪ {e
j
};
5. i ← i + 1;
6. End If
7. j ← j + 1;
Figure 2: The function Subpath.
Some concept of scheduling is encountered in our
heuristic algorithm. This can be viewed in the so-
lution representation where the services are arranged
according to their order of being done. A solution of
the problem is formed first of the services according
to their order of being serviced, then we apply Dijk-
1. While (l(i) > 1) Do
2. If (P(l) and P(l − 1) are not adjacent) then;
3. Dijkstra(P(l),NR,P(l − 1));
4. P
0
← Dijkstra(P(l), NR,P(l − 1));
5. P ← P ∪ P
0
;
6. l(i) ← l(i) − 1;
7. End If
8. End While
Figure 3: The function Complete.
1. For (i = 2 to dim P − 1) Do
2. For ( j = 1 to |NR|) Do
3. If (P(i) = (NR)
j
) then
4. ω((NR)
j
) ← ω((NR)
j
) − 1;
5. End If
6. End For
7. For ( j = 2 to r − 1) Do
8. If(P(i) = e
j
) then
9. β ← ω(e
j
);
10. a ← e
j
;
11. For (l(i) = j to r − 1) Do
12. e
l(i)
← e
l(i)+1
;
13. End For
14. |NR| ← |NR| + 1;
15. NR(|NR|) ← a;
16. ω(a) ← α − 1;
17. r ← r − 1;
18. End If
19. End For
20. End For
Figure 4: The function U pdate for ω > 1.
1. For (i = 2 to dim P − 1) Do
2. For ( j = 1 to |NR|) Do
3. If (P(i) = (NR)
j
) then
4. For (l(i) = j to |NR|) Do
5. (NR)
l(i)
← (NR)
l(i)+1
;
6. End For
7. |NR| ← |NR| − 1;
8. End If
9. End For
10. For ( j = 2 to r − 1) Do
11. If(P(i) = e
j
) then
12. For (l(i) = j to r − 1) Do
13. e
l(i)
← e
l(i)+1
;
14. End For
15. r ← r − 1;
16. End If
17. End For
18. End For
Figure 5: The function U pdate for ω = 1.
stra algorithm to determine a shortest path between
each couple of services. In the following, we explain
the steps of the previous Greedy algorithm Figure 1.
Capacitated Arc Routing Problem over Sparse Underlying Graph under Travel Costs Uncertainty
147

- Step 1: k ← 1 to start with the first vehicle.
- Step 2: while the set of the required edges is not
empty, and the number of the vehicles is less than or
equal to the number of the available ones.
- Step 3: the total accumulated demand is fixed
at the demand of the first required edge with strictly
positive demand and greatest efficiency. The first
edge in the path is the depot. The second edge in the
path is the first required edge with a strictly positive
demand.
- Step 4: while the accumulated demand respects
the capacity of the vehicle and there are still required
non-serviced edges.
- Step 5: call the function Subpath(), Figure 2, that
tests if adding the j
th
required edge will not violate
the capacity constraint. In this case, update the
accumulated demand to be the last one added to the
demand of j, and place this edge in the i
th
rank of the
constructed subpath. Then, move to the next rank and
then to the next required edge.
-Step 7 to Step 9: Once adding a required edge
could violate the capacity, go back to the depot. The
dimension of the constructed subpath is i where the
depot entrance is the i
th
-edge of this subpath i.e. the
last edge. Assignment of the dimension of P to an
auxiliary variable l (i).
-Step 10: call the function Complete, Figure 3. The
function Complete tests if the predecessor of each
required edge in P say at rank l(i) is not the required
edge served in this path P and placed at the rank
l(i) − 1, then call Di jkstra and insert a shortest path
of made of edges of NR between the edge at rank l(i)
and the edge at rank l(i) − 1. Each time an edge is
inserted, the dimension of the path P is incremented
by 1 and each edge at rank j − 1 will be at the rank j
to let the inserted edge compensate the emptied rank.
-Step 11: Update the constructed solution.
-Step 12: Determine the worst scenario that corre-
sponds to the scenario giving the maximal solution
cost.
-Step 13: Update the sets NR and R: in the case
where ω ¿ 1, Figure 4, the capacity ω of any used
edge in the path P is decremented by 1 each time the
edge is used. The same is applied to the edges of the
set R with the additional step that will be impose the
removal of the used edges from R and then added to
NR. For the case of ω = 1, Figure 5, the edges of both
sets are removed once traversed or served.
-Step 14: Move to the next vehicle.
We determine by this heuristic algorithm an initial
robust solution of the problem and a corresponding
worst scenario.
3.3.2 An Adapted Tabu Search Algorithm for
Solving the Robust Sparse CARP under
Travel Costs Uncertainty
In this part, we develop an adapted tabu search algo-
rithm for the Robust Sparse CARP under travel costs
uncertainty. This algorithm starts with the initial solu-
tion that is determined by the above greedy heuristic.
Consider the following notations:
• X
?
: best feasible solution determined by the tabu
search algorithm.
• L: the tabu list.
• Iter: number of iteration.
• MaxIter: maximum number of iterations.
• N(X
?
): neighborhood about the solution X
?
.
• S
?
: the worst scenario determined by the algo-
rithm.
• T h: a certain threshold.
Algorithm TS
Input: An Initial Feasible Solution
¯
X
Output: A Best feasible solution X
?
with the
corresponding worst scenario S
?
.
Initialization
0. X
?
←
¯
X;
1. L ← φ;
2. Iter ← 0;
Main Steps
1. While (Iter < MaxIter) Do
2. If (|L| ≤ T h) Then
3. Build
1
(N(X
?
));
4. If (|L| > T h) Then
5. Build
2
(N(X
?
));
6. For (t = 1 to |N(X
?
)|)
7. If ((Z(X
?
t
) ≤ Z(X
?
))&&(X
?
t
/∈ L)) Then
8. X
?
← X
?
t
;
9. End If
10. Update L, Iter;
11. End For
12. End While
13. Exit with solution X
?
and with the
corresponding worst scenario S
?
Figure 6: A Tabu Search Algorithm for determining best
feasible solution of the Robust CARP.
The algorithm contains several steps. Tabu search
starts by an initial feasible solution obtained thanks
to the greedy heuristic algorithm. All the visited so-
lutions are feasible. The exploration of the solutions
space is executed with some swaps. The elite soluti-
ons list is generated by improving the objective value
where the worst scenario has already been identified.
The core of the approach is to build neighborhoods
ICORES 2018 - 7th International Conference on Operations Research and Enterprise Systems
148

and perform several local searches in order to reach a
best solution. In Step 2 of the main steps of Figure 6,
if a certain threshold T h is not attained, we diversify
the search by using the function Build
1
to build the
neighborhood. In this step, we choose randomly two
vehicles, vehicle
1
and vehicle
2
, and we select two
services of each chosen vehicle i.e. service
1
1
, service
2
1
,
service
1
2
and service
2
2
. We check whether the swap of
these services (the first service of the first vehicle with
the first service of the second vehicle, and the second
service of the first vehicle with the second service of
the second vehicle) respects the capacity of the vehi-
cles, and we swap them as explained. In this way, we
explore the neighbors and we choose the best that mi-
nimizes the cost for the worst scenario. The search
progresses by iteratively moving from the current so-
lution to an improved solution. In Step 4 of the main
steps of this Figure, if the threshold Th is attained, we
intensify the search by using the function Build
2
to
build the neighborhood which allows the exchange of
two services of the same vehicle. The tabu based stra-
tegy incorporates a tabu list in the selection mecha-
nism that forbids the selection of the non-improving
solution for a certain tabu tenure. Each visited explo-
red solution is then settled in the tabu list L to not be
visited again unless the tabu list reaches its expiration
point i.e. the tabu status of a move is removed if it be-
longs to the list L and it exceeds MaxIter iterations.
For the intensification and the diversification of the
search, both are achieved via the functions Build
1
and Build
2
.
4 COMPUTATIONAL
EXPERIMENTS
In this section, we introduce a set of computational
experiments for which we apply each of these algo-
rithms; the heuristic algorithm and the tabu search
one. The benchmark of instances which we deal with
has not been treated before. We have run all these
instances with different number of scenarios and dif-
ferent densities of their corresponding networks in or-
der to evaluate the performance of each of the presen-
ted algorithms. The proposed algorithms are coded
in C++ and run on HP intel(R) Core(TM) i7 laptop
(with 2.80 Ghz and 16 GB of Ram). These test pro-
blem instances are studied for the first time and their
optimal solution values are not known. None of the
previous algorithms in the literature deals with such
type of instances. We work with sparse graphs having
a maximum degree of 3.
Consider the following notations:
• W S
H
: the worst scenario which is determined by
the heuristic algorithm.
• Cost
H
: the cost of the solution which is determi-
ned by the heuristic algorithm.
• CPU
H
: the time needed by the heuristic algorithm
to determine a solution.
• W S
T
: the worst scenario which is determined by
the tabu algorithm.
• Cost
T
:the cost of the solution which is determined
by the tabu algorithm.
• CPU
T
: the time needed by the tabu algorithm to
determine a solution.
The robust optimization that we apply via the de-
veloped algorithms allows us not only to get a robust
solution, but also it gives us the worst scenario that
may change upon the improvement of the solution as
we observe in the coming tables. In other terms, a
worst scenario of a solution determined by the heu-
ristic algorithm is not necessarily the same worst sce-
nario of the solution obtained by the tabu algorithm
after improvement. As a result, an improvement co-
mes in two directions: (1) obtaining a better solution
with a minimal cost and (2) improving the correspon-
ding worst scenario.
In Table 1, NI means no improvement i.e. the tabu
gives the same initial feasible solution determined by
the heuristic and cannot improve this solution after
passing 7 hours.
In Table 1, first of all, we notice that our greedy
heuristic succeeds to have the access to all the studied
instances with a very small CPU consuming time re-
gardless the quality of the found solution, whereas the
tabu algorithm did not succeed to have the access to
the big size instances.
Recall that G denotes a graph where V (G) denotes
the set of vertices and |V (G)| its cardinality, E(G) de-
notes the set of edges and |E(G)| its cardinality. The
set of required edges is represented by R, and the set
of different scenarios is represented by S. The used
fleet of vehicles is homogeneous where K denotes the
number of available vehicles and Q represents the ca-
pacity of each one. The different instances are ge-
nerated randomly i.e. the sparse network is genera-
ted randomly but respecting that |E(G)| = |V (G)|+ α
with 1 ≤ α ≤
|V (G)|
2
and that the maximum degree in
this network is 3. The costs over the scenarios are
all generated randomly too. The numerical instances
are divided into 3 groups: Groups A with 10 scena-
rios, Group B with 40 scenarios and Group C with
100 scenarios.
Capacitated Arc Routing Problem over Sparse Underlying Graph under Travel Costs Uncertainty
149
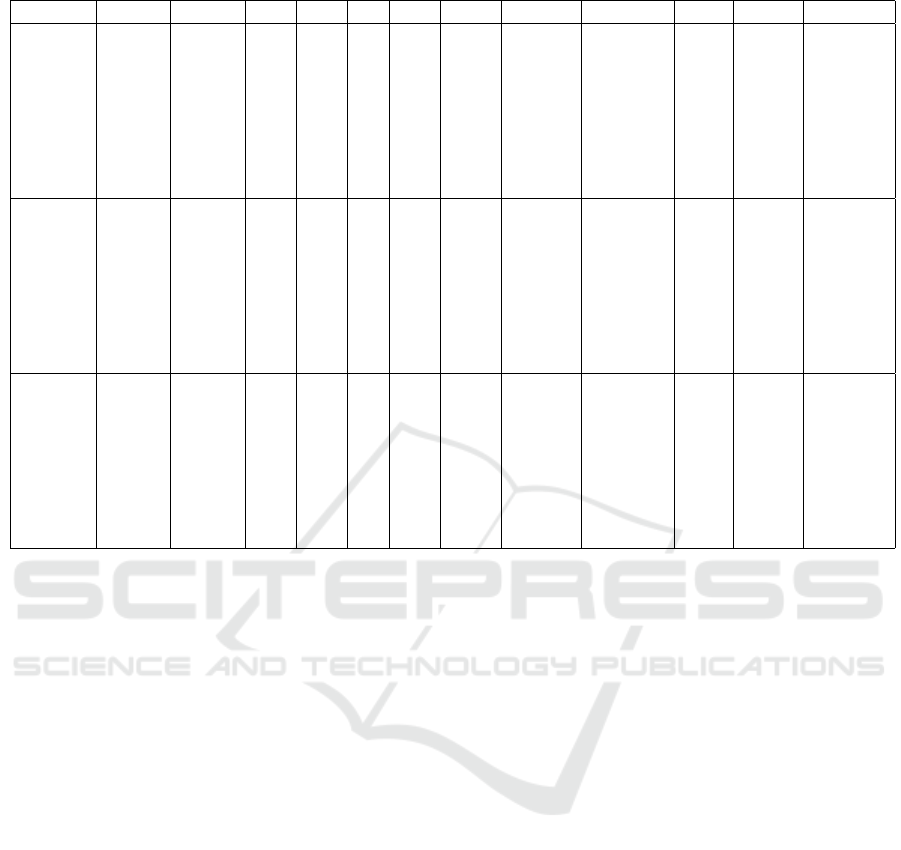
Table 1: Results of different families of the robust CARP problem instances.
Instance |V (G)| |E(G)| |R| S K Q W S
H
Cost
H
CPU
H
(s) WS
T
Cost
T
CPU
T
(s)
1A 10 13 5 10 2 15 10 1295 0.001 10 1059 0.5
2A 20 27 10 10 2 40 1 3104 0.008 1 2644 1.52
3A 50 70 25 10 3 50 6 10169 0.012 6 5658 8.326
4A 100 150 59 10 3 120 2 27370 0.056 10 17735 40.96
5A 231 331 121 10 4 120 3 46461 0.236 3 31074 124
6A 257 362 191 10 5 150 1 84875 0.392 5 50972 208
7A 307 439 260 10 7 150 5 124241 0.664 6 76389 357
8A 400 600 350 10 7 150 5 118039 1.168 5 71498 450
1B 10 13 5 40 2 15 20 1607 0.002 18 1529 2.216
2B 20 27 10 40 2 40 25 3594 0.052 15 1969 5.944
3B 50 70 25 40 3 50 1 9989 0.06 33 5439 35.152
4B 100 150 59 40 3 120 39 28120 0.305 37 16389 169
5B 231 331 121 40 4 120 22 43603 0.852 NI NI NI
6B 257 362 191 40 5 150 21 87199 1.723 NI NI NI
7B 307 439 260 40 7 150 8 119613 2.683 NI NI NI
8B 400 600 350 40 7 150 31 152818 2.8 NI NI NI
1C 10 13 5 100 2 15 48 1548 0.007 48 1216 4.872
2C 20 27 10 100 2 40 49 3655 0.27 49 2520 15.556
3C 50 70 25 100 5 60 32 9924 0.241 79 5689 101.084
4C 100 150 59 100 5 120 42 27870 0.452 54 18180 441.576
5C 231 331 121 100 7 120 66 45412 1.624 NI NI NI
6C 257 362 191 100 12 190 44 91616 3.81 NI NI NI
7C 307 439 260 100 12 225 13 149114 5.318 NI NI NI
8C 400 600 350 100 15 240 79 108750 8.375 NI NI NI
Consider the instances of Group A where we have
a relatively small number of scenarios (10 scenarios).
It is obvious that both algorithms perform well wha-
tever the size of the instance is. So, for instances with
small number of scenarios, the greedy heuristic algo-
rithm behaves almost in the same way for all the in-
stances where it determines a solution within a very
small consuming time. However, as the size of the
studied problem instance increases, the consuming
time needed by the tabu search algorithm increases
too, though it ameliorates the quality of the solution
obviously.
For a medium number of scenarios (40 scenarios)
represented by Group B instances, we observe that the
performance of the heuristic algorithm is almost the
same for all the instances, whereas the performance
of the tabu search algorithm differs according to the
size of the instance i.e. as the number of the vertices
of the network increases, the CPU consuming time of
this algorithm increases too although there is a high
improvement of the quality of the solution. However,
we see that there is no rapid improvement for big size
instances.
Concerning the last group of instances; Group C
with a big number of scenarios (100 scenarios), the
heuristic algorithm performs rapidly and determines a
solution within a very short time for all the instances,
while the performance of the tabu search algorithm is
affected by the size of the instance and it needs more
time and memory to improve the solution found by
the heuristic.
A general conclusion is drawn out, the heuristic
algorithm is able to determine an initial solution for
any problem instance and for any number of scena-
rios within a very short CPU consuming time. On
the other hand, the performance of the developed tabu
search algorithm is proportional to the number of sce-
narios and to the size of the studied problem instance.
In other terms, as the number of scenarios and the size
of the instance increase, the CPU consuming time of
the tabu search algorithm increases too. However, this
algorithm is able to improve very well the solution
which is determined by the heuristic whenever it is
able to ameliorate.
5 CONCLUSIONS
In this paper we studied the Robust Sparse Capaci-
tated Arc Routing Problem under travel costs uncer-
tainty where the uncertainty is represented by a set of
scenarios. We study this problem over a sparse net-
work whose maximum degree held by its vertices is 3.
We presented a mathematical formulation of this pro-
blem, and we developed two algorithms to solve the
problem. The first heuristic revealed to be effective
ICORES 2018 - 7th International Conference on Operations Research and Enterprise Systems
150

for the determination of a feasible solution for all the
studied instances within a very short CPU consuming
time whatever the number of scenarios is. The perfor-
mance of the developed adapted tabu search algorithm
is related to two factors: (1) the size of the studied in-
stance i.e. the number of vertices of the network over
which the problem is defined and (2) the total number
of scenarios. This algorithm starts by an initial so-
lution which is determined by the heuristic algorithm
and attempts to improve it. As seen in the previous
section, the CPU consuming time needed by the tabu
search algorithm extends as the number of the vertices
of the network increases and as the number of scena-
rios augments. The latter algorithm did not succeed to
present an improvement of the initial solution for the
big size instances under a medium and a big number
of scenarios, but at the end we have a robust solution
determined by the heuristic even if it is not of very
good quality.
REFERENCES
Christiansen, C., Lysgaard, J., and Wfhlk, S. (2009). A
branch-and-price algorithm for the capacitated arc
routing problem with stochastic demands. Operations
Research Letters, 37(6):392–398.
Coco, A. A., Solano-Charris, E. L., Santos, A. C., Prins, C.,
and Noronha, T. (2014). Robust optimization crite-
ria: state-of-the-art and new issuses. Technical report,
Universit
´
e de Technologie de Troyes.
Dantzig, G. and Ramser, J. (1959). The truck dispatching
problem. Management Science.
Fleury, G., Lacomme, P., and Prins, C. (2004). Evolutionary
algorithms for stochastic arc routing problems.
Kasperski, A. and Zieli
´
nski, P. (2011). On the approxima-
bility of robust spanning tree problems. Theoretical
Computer Science, 412(4-5):365–374.
Kouvelis, P. and Yu, G. (1997). Robust discrete optimiza-
tion and its applications. Springer-Science+Business
Media, B.V.
Mei, Y., Tang, K., and Yao, X. (2010). Capacitated arc
routing problem in uncertain environments.
Sbihi, A. (2010). A cooperative local search-based al-
gorithm for the multiple-scenario max-min knapsack
problem. European Journal of Operational Research,
202(2):339–346.
Shapiro, A., Dentcheva, S., and Ruszczy
´
nski, A. (2009).
Lectures on stochastic programming: Modeling and
Theory. Society for Industrial and Applied Mathema-
tics (SIAM, 3600 Market Street, Floor 6, Philadelphia,
PA 19104).
Sungur, I., Ord
´
o
˜
nez, F., and Dessouky, M. (2008). A ro-
bust optimization approach for the capacitated vehicle
routing problem with demand uncertainty. IIE Tran-
sactions, 40(5):509–523.
Wets, R. (2002). Stochastic programming models: Waitand-
see versus here-and-now. volume 128.
Capacitated Arc Routing Problem over Sparse Underlying Graph under Travel Costs Uncertainty
151
