
Isolation Forest for Anomaly Detection in Raw Vehicle Sensor Data
Julia Hofmockel
1
and Eric Sax
2
1
Audi Electronics Venture GmbH, Gaimersheim, Germany
2
Institute for Information Processing Technologies, Karlsruher Institute of Technology, Karlsruhe, Germany
Keywords:
Anomaly Detection, Data Transfer, Isolation Forest.
Abstract:
A vehicle generates data describing its condition and the driver’s behavior. Sending data from many vehicles
to a backend costs money and therefore needs to be reduced. The limitation to relevant data is inescapable.
When using data collected from a vehicle fleet, the normality can be learned and deviations from it identified
as abnormal and thus relevant. The idea of learning the normality with the Replicator Neural Network and
the Isolation Forest is applied to the identification of anomalies and the reduction of data transfer. It is com-
pared how good the methods are in detecting anomalies and what it means for the traffic between vehicle and
backend. It can be shown that the Isolation Forest beats the Replicator Neural Network. When reducing the
transfered amount of data to 7%, in average more than 80.63% of the given anomalies are included.
1 INTRODUCTION
In the automotive industry, the usage of data gener-
ated by vehicles offers new potential for the future.
By collecting and processing the data from many ve-
hicles on a backend, functions like autonomous driv-
ing or the improvement of the product in a technical
or costumer orientated way can be realized (see Fig.
1) (Gadatsch, 2017).
One challenge in this context is the amount of
data. Only in the internal communication system, one
vehicle alone produces up to 750 kilobytes per sec-
ond. Extrapolated to a fleet of 150 vehicles, each driv-
ing one hour per day, up to 2.8 terabytes are produced
in one week. Transmitting all data from vehicle to
backed over air and store it there is not feasible, be-
cause of the transmission costs, data loss and the re-
quired preprocessing steps in the vehicle. One idea
to solve this issue is the focus on anomalies, because
they might represent interesting events and they bring
new information to the backend. An anomaly can be
defined as an observation that deviates so much from
other observations as to arouse suspicion that it was
generated by a different mechanism (Hawkins, 1980).
This paper applies the idea of finding unusual ve-
hicle behavior as deviation from the normality defined
by the raw vehicle sensor data from a vehicle fleet.
The focus is in the application of the Isolation Forest
approach.
The paper is organized as follows: In Sect. 2
vehicle data
Figure 1: Collection of data via vehicle fleet.
different methods for detecting anomalies are intro-
duced. Section 3 explains how the idea of anomaly
detection is applied on the vehicles sensor data. Ex-
periments and results are demonstrated in Sect. 4.
The paper ends with a conclusion and the description
of further research in Sect. 5.
2 STATE OF THE ART
Anomalies are detected in various domains as for
example to recognize attacks on a network (intru-
sion detection) or some kind of fraud regarding credit
card transactions. It is also applied in medicine to
detect diseases and unusual symptoms. Comparable
to anomalies in the vehicle sensor data is the detec-
tion of a defect sensor before the system breaks down
(Pahuja and Yadav, 2013; Pimentel et al., 2014; Gold-
stein and Uchida, 2016).
Model-based methods for anomaly detection are
one-class Support Vector Machines (SVMs) or Repli-
cator Neural Networks (ReplNN) (Chandola et al.,
2009). A newer method is the Isolation Forest (Ifor-
est) (Liu et al., 2008; Liu et al., 2012).
Hofmockel, J. and Sax, E.
Isolation Forest for Anomaly Detection in Raw Vehicle Sensor Data.
DOI: 10.5220/0006758004110416
In Proceedings of the 4th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2018), pages 411-416
ISBN: 978-989-758-293-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
411

In the one-class SVM, the smallest possible sphere
including all the normal data is found during train-
ing. In the application, data points outside of the
sphere are detected as abnormal (Tax and Duin, 2004;
Sch
¨
olkopf et al., 2000).
While training a Replicator Neural Network, a
prediction function f (x) is learned, such that the dif-
ference between training point x ∈ R
d
, and its recon-
structed output f (x) =
˜
x,
˜
x ∈ R
d
is minimized for all
x ∈ T , with T describing the training data and d the
number of features. The weights are learned with nor-
mal data and in the application the reconstruction er-
ror of test data point x
test
characterizes its anomaly
score. The reconstruction error is calculated as the
mean squared difference between the original value
and its reconstruction (Dau et al., 2014; Hawkins
et al., 2002):
||x
test
−
˜
x
test
||
2
2
. (1)
The Isolation Forest approach assumes that
anomalies are easier to isolate from the rest of the data
than normal instances (see Fig. 2) (Liu et al., 2008;
Liu et al., 2012).
Many binary trees are generated using different
subsamples of the training data T . Hereby splitting
feature and splitting value are chosen randomly (uni-
form distribution). The only parameters to define are
the number of trees (t) and the subsampling size (ψ).
As exemplary shown in Fig. 3, the tree where the
splitting value differentiates between normal and ab-
normal is more likely to be generated. That is why
the expected path length of an abnormal data point is
shorter than the path length of normal instances. Ac-
cordingly for the example (Liu et al., 2008; Liu et al.,
2012):
P(T
1
) < P(T
2
) =⇒ E(h
2
) < E(h
0
) < E(h
1
), (2)
with P(T
i
) describing the probability of tree T
i
and
E(h
i
) as the expected path length (h
i
) of data point x
i
,
i ∈ {0,1,2}:
E(h
i
) = P(h(x
i
) = 1) · 1 + P(h(x
i
) = 2) · 2. (3)
The average path length of the test data point
x
test
overall generated trees is used to calculate the
anomaly score. The smaller the score, the higher the
probability of being an anomaly (Liu et al., 2008; Liu
et al., 2012).
3 OUR CONTRIBUTION
For the anomaly detection in vehicle sensor data,
the concept of one-class classification is employed.
Therefore data items are collected on the backend and
Figure 2: Isolation approach.
by assuming that most of them are normal, a refer-
ence model is learned (compare Fig. 1). In the ap-
plication phase, the model is applied in the vehicle to
detect deviations from the normal behavior as anoma-
lies (Chandola et al., 2009). This approach ensures
that after the training phase, data transfered between
vehicle and backend is restricted to unusual situations
not or rarely seen on the backend (see Fig. 4).
The paper analyses if the Isolation Forest is suit-
able to detect anomalies in raw vehicle sensor data
with the aim of reducing data transfer. For compari-
son, a Replicator Neural Network is trained and tested
additionally.
4 EXPERIMENTS AND RESULTS
To evaluate the methods for detecting anomalies in
raw vehicle sensor data, different datasets are used.
Based on data collected by a vehicle fleet, the model
describing the normality is trained. Hereby it is as-
sumed that most of the data are normal, but the ground
truth is not known. For evaluation, different rides with
enforced anomalies like an accident, full breaking or
overspeed are under consideration. These rides are
completely labeled.
The analyzed data are the signals transfered
via the internal communication system in the vehi-
cle, more concrete via the Controller Area Network
(CAN-bus) (Winzker, 2017). These signals like ve-
locity, longitudinal/lateral acceleration, steering an-
gle/velocity, information about opened windows or
brake pressure describe driving and vehicle behavior.
4.1 Evaluation criteria
For the comparison of the Replicator Neural Network
and the Isolation Forest, the database X is split as
shown in Fig. 5. The training data T ⊂ X are as-
sumed to be normal and used to learn the reference
model. The validation data V ⊂ X\T is sampled from
the same database as the training data and is there-
fore also meant to be mostly normal. The proportion
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
412

x
0
x
1
x
2
(a) exempary dataset with three instances,
x
2
most unusual
x
0
x
1
x
2
(b) Tree T
1
, P(T
1
) = D
01
/D
02
x
2
x
0
x
1
(c) Tree T
2
, P(T
2
) =
D
12
/D
02
Figure 3: Example for understanding Isolation Forest, D
i j
is the distance from data point x
i
to point x
j
with D
01
< D
12
, (Liu
et al., 2012).
of detected anomalies in the validation data (γ) shows
how good the model generalizes and if it can be used
to reduce the data transfer:
γ =
|V
0
|
|V |
, (4)
with V
0
describing the validation data detected as
anomaly.
Based on its anomaly score, an instance is pre-
dicted as abnormal if the score succeeds a defined bor-
der τ.:
score > τ → anomaly. (5)
For τ, the 95%-quantile of the anomaly scores of the
training data (S(T )) is used because it ensures that
95% of the training data are classified as normal,
while the 5% most exceptional training data get ig-
nored. Thus, the assumption of exclusively normal
training data gets defused:
τ
Q
95
= Q
95
(S(T )). (6)
The border is also applied to classify the labeled test
data and to calculate Recall (fraction of correctly de-
tected anomalies among real anomalies) and Preci-
sion (fraction of correctly detected anomalies among
detected anomalies). Their harmonic mean is the F-
Score (Bekkar et al., 2013):
F-Score = 2
Recall · Precision
Recall + Precision
. (7)
Additionally, the Area Under the Curve (AUC) result-
ing from the Receiver-Operating-Characteristic curve
(ROC-curve) is calculated, because for this purpose
no concrete border needs to be set (Fawcett, 2006).
It can be evaluated if the anomaly score in general is
abnormal data
Figure 4: Reduction to anomalies in application phase.
training data (T )
validation data (V )
test data
Figure 5: Usage of given data.
suitable to sort the data points by normality and the
methods can be compared. The analysis is limited to
the test data completely labeled (see Fig. 5).
4.2 Database
Different datasets are used for evaluation. Table 1
clarifies that the nine test cases differentiate in the
amount of given data for training, the number of ana-
lyzed signals d and the enforced anomalies within the
test ride. The sampling rate is 100 milliseconds.
4.3 Results
The following section compares the Replicator Neu-
ral Network with the Isolation Forest. The Replicator
Neural Network consists of one hidden layer with d
neurons (T
´
oth and Gosztolya, 2004; Dau et al., 2014).
Our experiments have revealed that for the Isolation
Forest, t = 256 and ψ = 256 are the settings which
can’t be improved by further increase.
Table 2 shows the AUC for the different use cases
presented in Table 1. It can be identified that espe-
cially the accidents can be perfectly separated from
the remaining data due to an AUC equals 1. The Ta-
ble clarifies that the Isolation Forest has an high av-
erage AUC of 0.9080 which beats the ReplNN. In all
test cases the Isolation Forest achieves an AUC above
0.83. The only exception is test case K8. Here the
Replicator Neural Network performs better, but also
not well. Reason could be that for the high dimension
(d = 353), the amount of training data is not enough.
Isolation Forest for Anomaly Detection in Raw Vehicle Sensor Data
413

Table 1: Database for evaluation.
Id
Driving time for
training [h]
d
Anomalies in test ride
K1
36
137
accident
K2
36
31
accident
K3
47
239
accident
K4
47
45
accident
K5
41
71
enforced anomalies as drive with open doors, full
breaking, overspeed, ...
K6
71
106
enforced anomalies as drive with open doors, full
breaking, close window with pinched book, ...
K7
27
353
Electronic Stability Control (ESC) intervention
K8
22
353
ESC intervention
K9
55
161
Antilock Braking System (ABS) intervention
Shown by the remaining test cases, the Isolation For-
est provides a score, which is a suitable measurement
to sort data points by their normality.
When regarding the proportion of detected
anomalies in the validation data (γ), the Isolation For-
est sticks out to generalize quite well. The value of
γ = 0.0696 fits the border τ
Q
95
. When 95% of the
training data are classified as normal, 94.1% of the
validation data are also predicted to be normal. The
Replicator Neural Network with γ = 0.237 tends to
overfit and can not generally be applied to different
data than the training data. Accordingly, when ap-
plying the trained Isolation Forest in vehicles, only
6.96% of the data are identified as abnormal and
transmitted to the backend. The reduction of data
transfer is guaranteed. Recall and Precision explain
that in average 80% of the anomalies are detected and
transfered, but only 31.45% of the data are really ab-
normal. The classification with the fixed threshold
τ
Q
95
is not reliable and additionally the anomaly score
needs to be taken into account.
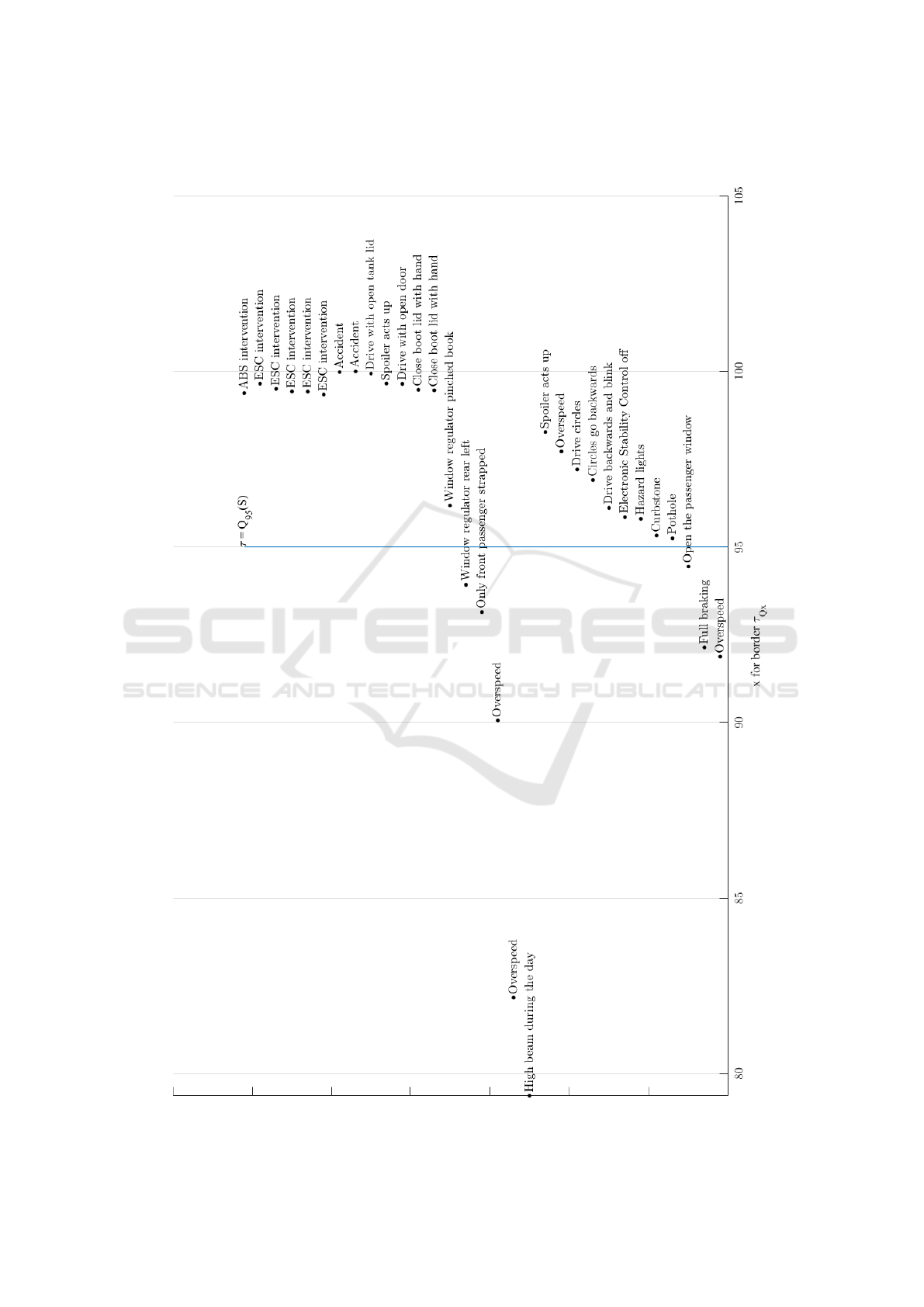
Figure 6 in the Appendix demonstrates which
anomalies are detected by the Isolation Forest with
threshold τ
Q
95
. It can be seen that especially the ac-
cidents and safety interventions are identified. Less
extreme driving situations (e.g. full braking or over-
speed) are not categorized to be abnormal. Events like
window opening rear left are predicted as anomaly be-
cause they are rare in the training data T .
In summary, the results show that the amount of
data transfered from vehicle to backend can be re-
duced while ensuring that most of the abnormal sit-
uations are included. Furthermore, when considering
the anomaly score, the most abnormal situations can
directly be identified.
5 CONCLUSION
The paper introduces the idea of anomaly detection to
reduce the data transfer between vehicle and backend.
The investigations show that the anomaly score yield
by the Isolation Forest can be used to identify very
unusual situations and delivers better results than the
Replicator Neural Network. The definition of a score-
based border distinguishing between normal and ab-
normal is difficult and depends on the use case.
By reducing data transfer to data detected as ab-
normal, up to 93% of traffic can be saved. Hereby it
is ensured that most of the actual anomalies are trans-
mitted as well. The wrongly classified data points
can then be separated on the backend by their smaller
anomaly score.
The next steps will be further improvements of the
model. The investigation so far was reduced to static
events. Since the vehicle produces time dependent
data, an extension is necessary. Features describing
the time series need to be extracted.
REFERENCES
Bekkar, M., Djemaa, H. K., and Alitouche, T. A. (2013).
Evaluation measures for models assessment over im-
balanced data sets. Journal Of Information Engineer-
ing and Applications, 3(10).
Chandola, V., Banerjee, A., and Kumar, V. (2009).
Anomaly detection: A survey. ACM Comput. Surv.,
41(3):15:1–15:58.
Dau, H. A., Ciesielski, V., and Song, A. (2014). Anomaly
detection using replicator neural networks trained on
examples of one class. In Dick, G. and Browne,
Will N., e. a., editors, Simulated Evolution and Learn-
ing. SEAL 2014. Lecture Notes in Computer Science,
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
414
Table 2: Comparison: Replicator Neural Network vs. Isolation Forest.
τ = Q
95
(S(X))
AUC γ Recall Precision
ReplNN Iforest ReplNN Iforest ReplNN Iforest ReplNN Iforest
K1 1.0000 1.0000 0.2762 0.0444 1.0000 1.0000 0.0167 0.0270
K2 1.0000 1.0000 0.0912 0.1347 1.0000 1.0000 0.0909 0.0769
K3 1.0000 1.0000 0.5634 0.1773 1.0000 1.0000 0.0182 0.1429
K4 1.0000 0.9895 0.0699 0.0103 1.0000 1.0000 0.0400 0.3333
K5 0.7500 0.9356 0.1249 0.0833 0.7500 0.5833 0.6000 0.7778
K6 0.8126 0.8813 0.1192 0.0266 0.8182 0.5455 0.1765 0.5455
K7 0.8600 1.0000 0.6716 0.0693 1.0000 1.0000 0.3846 0.4545
K8 0.6690 0.5267 0.0998 0.0372 0.3590 0.1282 0.1458 0.4167
K9 0.8065 0.8387 0.1138 0.0430 1.0000 1.0000 0.0476 0.0556
mean 0.8776 0.9080 0.2367 0.0696 0.8808 0.8063 0.1689 0.3145
pages 311–322, Cham. Springer International Pub-
lishing.
Fawcett, T. (2006). An introduction to roc analysis. Pattern
Recogn. Lett., 27(8):861–874.
Gadatsch, A. (2017). Big Data – Datenanalyse als Ein-
trittskarte in die Zukunft, pages 1–10. Springer
Fachmedien Wiesbaden, Wiesbaden.
Goldstein, M. and Uchida, S. (2016). A comparative eval-
uation of unsupervised anomaly detection algorithms
for multivariate data. PLoS ONE, 11(4):1–31.
Hawkins, D. (1980). Identification of Outliers. Springer
Netherlands.
Hawkins, S., He, H., Williams, G., and Baxter, R. (2002).
Outlier detection using replicator neural networks. In
Kambayashi, Y. and Winiwarter, Werner, e. a., editors,
4th International Conference on Data Warehousing
and Knowledge Discovery, pages 170–180, Berlin,
Heidelberg. Springer Berlin Heidelberg.
Liu, F. T., Ting, K. M., and Zhou, Z.-H. (2008). Isolation
forest. In IEEE International Conference on Data
Mining 2008, ICDM ’08, pages 413–422, Washing-
ton, DC, USA. IEEE Computer Society.
Liu, F. T., Ting, K. M., and Zhou, Z.-H. (2012). Isolation-
based anomaly detection. ACM Trans. Knowl. Discov.
Data, 6(1):3:1–3:39.
Pahuja, D. and Yadav, R. (2013). Outlier detection for dif-
ferent applications:review. International Journal of
Engineering Research & Technology, 2.
Pimentel, M. A. F., Clifton, D. A., Clifton, L., and
Tarassenko, L. (2014). Review: A review of novelty
detection. Signal Process., 99:215–249.
Sch
¨
olkopf, B., Williamson, R. C., Smola, A. J., Shawe-
Taylor, J., and Platt, J. C. (2000). Support vector
method for novelty detection. In Solla, S. A., Leen,
T. K., and M
¨
uller, K., editors, Advances in Neural
Information Processing Systems 12, pages 582–588.
MIT Press.
Tax, D. M. J. and Duin, R. P. W. (2004). Support vector data
description. Mach. Learn., 54(1):45–66.
T
´
oth, L. and Gosztolya, G. (2004). Replicator neural net-
works for outlier modeling in segmental speech recog-
nition. In Yin, F.-L., Wang, J., and Guo, C., editors,
Advances in Neural Networks – ISNN 2004, pages
996–1001, Berlin, Heidelberg. Springer.
Winzker, M. (2017). Bussysteme in der Automobiltech-
nik, pages 175–179. Springer Fachmedien Wiesbaden,
Wiesbaden.
Isolation Forest for Anomaly Detection in Raw Vehicle Sensor Data
415
APPENDIX
Figure 6: Detected anomalies sorted by anomaly score.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
416
