
On Social Interactions and the Emergence of Autonomous Vehicles
Carolina Centeio Jorge and Rosaldo J. F. Rossetti
Departamento de Engenharia Inform
´
atica, Faculdade de Engenharia da Universidade do Porto,
Rua Dr Roberto Frias, s/n – 4200-465, Porto, Portugal
Keywords:
Autonomous Vehicles, Social Interactions, Transport Systems, Human-Technology Interaction.
Abstract:
Nowadays and in the contemporary age, the reality of an all-autonomous traffic seems closer and closer.
However, this transition period casts a lot of cards onto the table. Although technology can be replacing people
at the driver seat, it has not as yet gained our full trust in what concerns communication in real time and safety.
Humans interact on a daily basis in their various activities, and traffic is no exception. Most actions performed
on the road rely on our perception of others’ awareness and potential reactions. For instance, pedestrians seek
for an eye contact before crossing the road, drivers seek for a gesture before starting a manoeuvre, and so forth.
Thus, the question remaining is what happens when someone is seeking such a communication interaction and
the car has no driver, nor has it someone who even knows what the car is doing. Moreover, people seating in
the car might be performing any other activities but driving. Other questions also arise such whether people
will accept the idea of trusting self-driving vehicles, or whether will they feel safe when walking amongst such
machines. In this paper we pursue a rather social perspective and will raise questions, covering the literature
so as to understand what practitioners, researchers and the industry have been doing to overcome the lack of
confidence in self-driving cars and improve their trustworthiness towards more efficient and smarter mobility,
as well as to identify trends and approaches to answer these emerging questions.
1 INTRODUCTION
As technology moves forward at an immensely accel-
erated pace, the old-fashioned utopia of self-driven
cars is an ever-closer reality. Bearing this in mind,
many questions arise, such as what impacts these au-
tonomous vehicles will have on pedestrians’ lives.
Undeniably, this subject has been the target of much
research, leading to many other still unanswered
questions.
Although technology can be replacing people at
the driver seat, trustworthiness of such new technolo-
gies is still to be proven. People are used to a cer-
tain kind of interactions, and this leads to constant and
patterned behaviours such as seeking for eye contact
before crossing the road. The same happens in cross-
roads when drivers (or a cyclist and a driver) look at
each other before yielding, to give the other assurance
that they are safe if they proceed. With a partially
autonomous traffic, it is necessary to try and foresee
how people trust the car behaviour and what they do
when confronted with one. And later on, in an all-
autonomous traffic, it is important to state whether
people should trust blindly the car sensory and de-
cision system and risk crossing the road. Recent re-
search shows that people feel reticent about crossing
the road in front of a car without a driver they can look
at so as to get any kind of signal.
In this paper, we aim to evaluate this kind of sce-
narios, summarizing the current state of the art and re-
flecting upon what has been done, what will be done
and what needs to be done. This literature review
may lead to new questions and research ideas, since
the most recent research will be analysed and counter-
weighted with older studies, models and simulations,
as well.
The rest of this paper is structured as follows.
After giving an insight into the current scenarios in
road networks, Section 2 discusses on the pedes-
trian behaviour as well as the driver behaviour at
marked crossings. A brief explanation of the tradi-
tional models of traffic dynamics from the perspective
of the driver’s decision-making processes are also pre-
sented. Section 3 focuses on recent studies tackling
the problems of partially autonomous traffic interac-
tions and what has been done to address the many is-
sues arising in this context. Finally, we reflect on all
the issues stated above and suggest some ideas for fu-
ture work, as we reach the conclusion of this paper.
Centeio Jorge, C. and Rossetti, R.
On Social Interactions and the Emergence of Autonomous Vehicles.
DOI: 10.5220/0006763004230430
In Proceedings of the 4th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2018), pages 423-430
ISBN: 978-989-758-293-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
423
2 SOCIAL INTERACTIONS IN
TRAFFIC
Human beings interact by attempting to create a mu-
tual behaviour adaptation process with other individ-
uals through verbal and non-verbal communication.
Such non-verbal communication can be reflected in
posture, gaze and other kinds of body language (Lehs-
ing et al., 2016b). This section discusses on how so-
cial interactions in traffic are an essential communi-
cation means that should also be taken into consider-
ation even when autonomous vehicles are to be de-
ployed.
2.1 Current Scenario
Needless to say that interactions between road users
(e.g. pedestrians, drivers and cyclists) is not only
based on a set of road rules but it is also dependent
on a large range of informal social protocols such as
eye contact, gestures and other social cues. There-
fore, the less the road is signalised with traffic lights
and other signs, the more a safe navigation depends
on the ability of a person (either a driver or a pedes-
trian) to perceive and interpret these social cues (Earl
et al., 2016). The behaviour of a pedestrian on marked
crossings, a cyclist waving to signal his/her willing to
turn left and even a driver changing lane are situations
that require quick problem-solving thinking based on
visual perception. Research in the field of transport
engineering and traffic psychology has applied meth-
ods to better understand how such interactions occur
so that dangerous situations and fatalities can be ef-
fectively reduced (Lehsing et al., 2016b).
2.1.1 Pedestrian Behaviour at Marked Crossings
In its safety reminders for pedestrians the U.S. De-
partment of Transportation (US DOT) recommends
people to make eye contact with drivers as they ap-
proach you to make sure you are seen (NHTSA,
2012). With just a look, one can estimate the car
speed and the distance of the car from the cross-
ing, highlighting the importance of eye contact in
pedestrian-driver interactions. Bearing this in mind,
we calculate the time we have to cross without get-
ting hit by a car or another vehicle; finally, we decide
whether we can cross the road or need to wait. How-
ever, more often than expected, one factor that af-
fects our decision is the various signs given by drivers.
Waiting for these signs, which range from eye contact
to the waving of a hand or the flashing of headlights, is
a consequence of the fact that drivers who give way to
pedestrians usually prefer to lower their speed rather
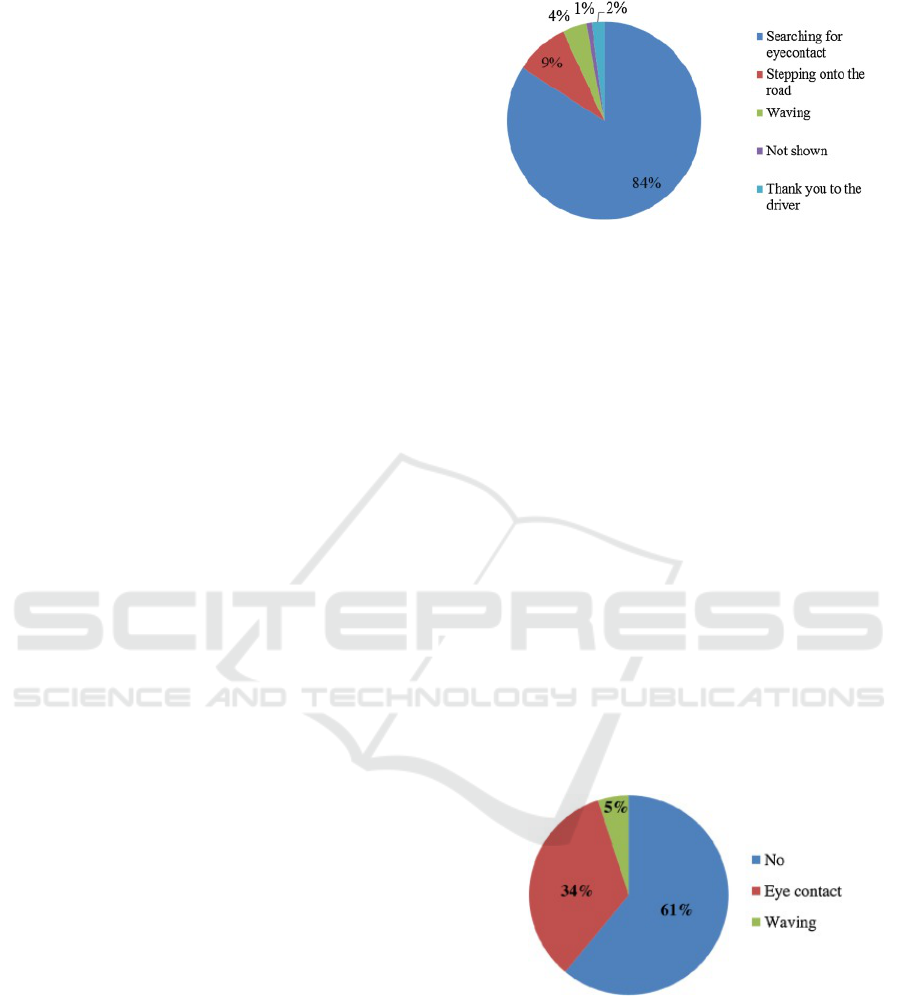
Figure 1: Pedestrian Intention (Sucha et al., 2017).
than to bring their car to halt. Pedestrians feel the
need to ensure their own safety. In fact, as we can see
in Fig. 1, 84% of pedestrians wait on the pavement
showing their intent to use the crossing sought to es-
tablish eye contact with the driver of an approaching
car (Sucha et al., 2017).
2.1.2 Driver Behaviour at Marked Crossings
Although the great majority of the pedestrians are
proactive in seeking eye contact or trying to estab-
lish other forms of explicit communication with the
drivers, only 39% of the drivers give them feedback,
as shown in Fig. 2. Thus, it makes it hard for a pedes-
trian to know whether the car will yield the expected
reaction. On the other hand, drivers are influenced
by the expression of a pedestrian. When pedestrians
are engaged in activities such as talking on the phone,
texting, reading (e.g. newspapers), talking to another
pedestrian or any other non-transport-related activity,
a driver might perceive this as a lack of willingness or
preparedness by the pedestrian to cross the road.
Figure 2: Driver Feedback (Sucha et al., 2017).
2.1.3 Uncontrolled Mid-block Crossings
The interaction during traffic conflicts at mid-block
cross walks can be portrayed as a competition for
limited resources, mostly time and space. A study
shows that game theory is applicable to the analysis
of the interaction between vehicles and pedestrians as
such theory is based on the rational behaviour exhib-
ited in interpersonal conflicting situations. In order
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
424
to deal with the limited rationality in virtually most
decision-making processes, evolutionary game theory
is presented as an extension of the classical paradigm
towards bounded rationality in the study by (Chen
et al., 2016). In such cases, the developed model
is calibrated and validated using real data collected
at Jianshe First Road in Wuhan, China. The results
show that the proposed model is able to properly sim-
ulate the interaction between vehicles and pedestrians
(Chen et al., 2016).
2.1.4 Traditional Models in Traffic
Other social interactions worth understanding are the
ones that happen in traffic, amongst drivers. Mixed
traffic conditions are commonly characterised by the
presence of different types of vehicle and behaviours.
Different manoeuvring capabilities of different vehi-
cle types lead to vehicle-type-dependent longitudinal
and lateral movement driving behaviours. Weak lane
discipline allows drivers to simultaneously look for
possible lateral movements while progressing longi-
tudinally. All of this gives rise to various driving phe-
nomena and microscopic models — an approach that
gives focus onto a finer grained perspective of traffic
flow and the inner-workings of its individual particles
(Munigety and Mathew, 2016). That being said, it is
important to understand how drivers behave in these
situations as an attempt at predicting the problems in
the interactions between drivers and autonomous ve-
hicles.
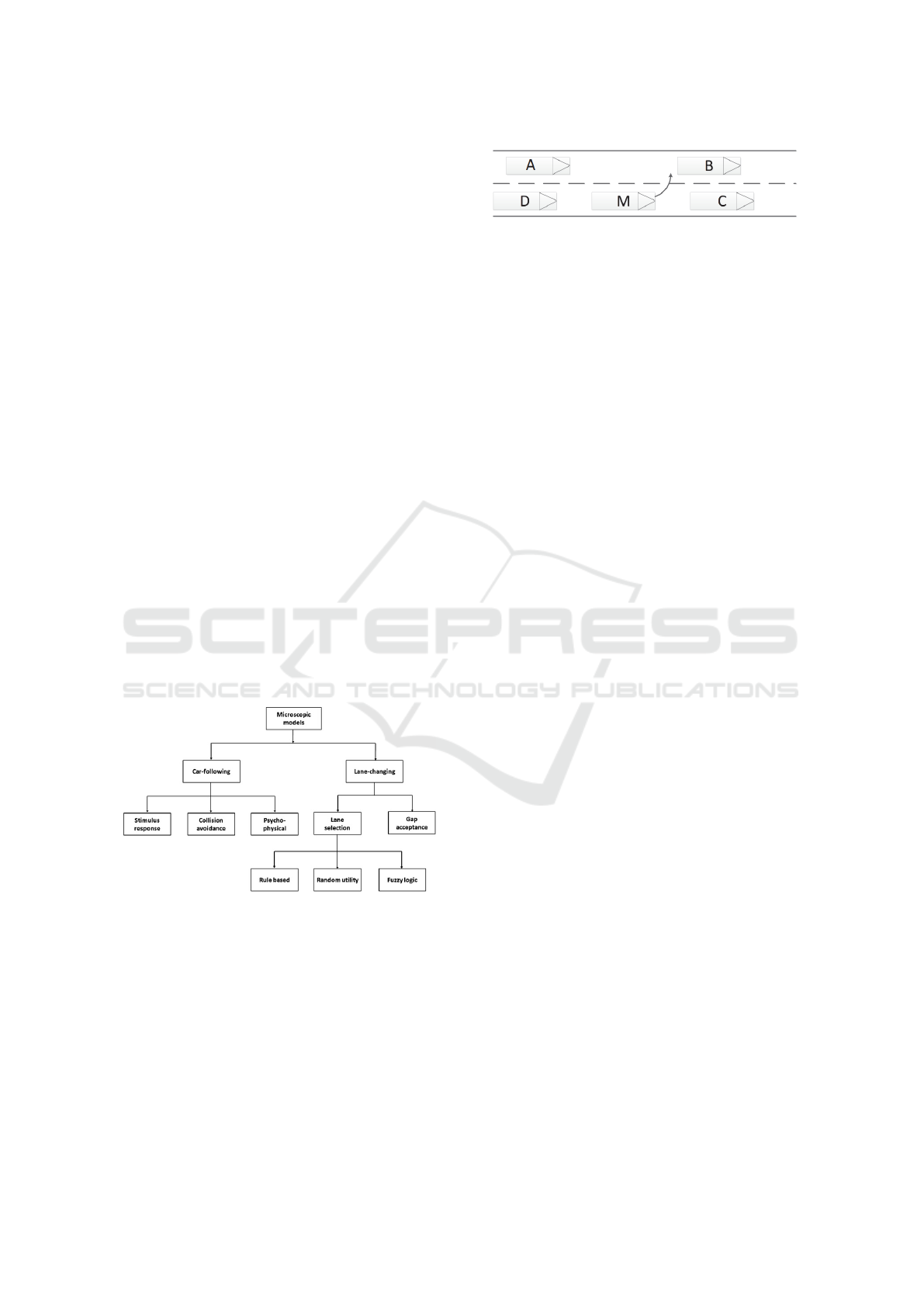
Figure 3: Microscopic Models (Munigety and Mathew,
2016).
According to (Munigety and Mathew, 2016), a
tree classification of different car-following and lane-
changing models are shown in Fig. 3. An exten-
sive review of these driver behavioural models is also
described by the authors. Lane changing models
are gaining prominence within the scientific research
community, since they are one of the most frequent
interactions implemented in traffic simulations.
In Fig. 4, vehicle M is the vehicle that wants to
make a lane change, vehicle C and vehicle D are the
Figure 4: Lane Changing (Nagahama et al., 2017).
leading and the following vehicles in the same lane as
vehicle M, respectively; vehicle B and vehicle A are
the leading and following vehicles, respectively, in the
target lane. Car-following is, as the name says, the ac-
tion of a car following another. For example, M is fol-
lowing C (Fig. 4) (Nagahama et al., 2017). Most lane-
changing models are based on the hypothetical no-
tion that when the vehicle of an adjacent lane changes
lane, the following vehicle of the target lane keeps a
uniform motion. However, this hypothesis does not
reflect the real lane-changing scenario. A paper has
already put forward a lane-changing model with the
consideration of car following behaviours in mind,
focusing on the kinematic behaviour of the lane-
changing vehicle in the process of accelerated lane
change (Xiaorui and Hongxu, 2013). The vehicle in-
teraction for lane changing is more complex than that
of a car-following event because more vehicles are in-
volved in the lane-changing event, which requires a
greater workload of the subject vehicle driver. The
lane-changing event is associated with a higher crash
potential due to complex interactions with neighbour-
ing vehicles (Oh et al., 2017) . According to the usual
driver behaviour, when a vehicle wants to run in front
of his own vehicle and he accepts this behaviour, then
he will speed down to ensure safety for both. Consid-
ering the car-following behaviour, and accounting for
the real lane-changing scenario, and mainly focusing
on the kinematic behaviour of the lane-changing ve-
hicle in the process of accelerated lane change, the
study devises a lane-changing model with the con-
sideration of a car-following behaviour (Xiaorui and
Hongxu, 2013).
2.1.5 Communication Barrier
As stated above, eye contact plays a very important
role on pedestrians’ sense of safety. It also avoids
danger when the driver, due to distraction or any other
reason, is not willing to stop. This kind of communi-
cation can be significantly reduced when the driver’s
car has deeply tinted windows. This situation can be
compared to a car with no driver, since both make it
very difficult to understand cues. Deeply tinted win-
dow glass transmits less light than less deeply tinted
glass and therefore reduces driver visibility. The task
of looking through the rear window in dangerous situ-
ations was stimulated in a laboratory setting with road
On Social Interactions and the Emergence of Autonomous Vehicles
425

users such as pedestrians and cyclists. The car was
always detected, but detection probability decreased
with reduced luminous transmittance for the child and
roadway debris targets. The results suggest that the
safety of backing manoeuvres is compromised for all
drivers at the darkest tinting levels studied (Freedman
et al., 1993). Correspondingly, the UK government
demands that the front windscreen must let at least
75% of light through and the front side windows must
let at least 70% of light through for all vehicles first
used on April the 1
st
, 1985 or later (United Kingdom
Government, ). The way this scenario affects the be-
haviour of other road users may lead us to a better
understanding of some of the problems on the inter-
action between humans and driverless cars.
2.2 Simulating Current Scenario
2.2.1 Driver-pedestrian Interactions
In order to analyse this behaviour, in addition to the
research in the field of transport engineering and traf-
fic psychology to reveal underlying processes and key
factors in traffic that lead to dangerous situations or
fatalities, several driving simulators have been imple-
mented. Some use very complex apparatuses in full
scale so as to reach full immersion, whereas others are
considered low-cost environments resorting to sim-
pler computer environments based on video games
(Rossetti et al., 2013).
A pedestrian simulator, based on motion track-
ing technology, combined with a driving simulator al-
lowed the participants to communicate non-verbally.
This approach approximates the study to real-life sit-
uations since it creates a communication bridge be-
tween both the driver and the pedestrian in pedestrian-
crossing situations. The interaction was measured
using cross recurrence quantification analysis as de-
scribed in (Lehsing et al., 2016b).
A simulation model for pedestrian-vehicle inter-
actions at unsignalised mid-block cross walks cap-
tures the behaviour of both vehicles and pedes-
trians when approaching unsignalised interactions.
The model is based on a cellular-automata ant
metaphor that is calibrated with detailed behavioural
data collected and extracted from observations of
two unsignalised intersections in Nanjing, China.
In particular, this simulation model can replicate
pedestrian-vehicle interaction and pedestrian delay
with high accuracy and reliability (Chen et al., 2016).
The classical and common approach of driving
simulation as a tool in traffic research is usually
limited to one driving simulator. However, the be-
haviour of the drivers depends on the traffic environ-
ment. Therefore, it is important for the program to
gather different scenarios with a higher number of
programmed road users. Unfortunately, this is a bot-
tleneck due to programming skills required and soft-
ware limitations. The proposed method for linking
simulators is said to have the potential to create a
more human-like behaviour by means of opening in-
teraction channels between road users in a driving
simulation (Lehsing et al., 2016a). Nonetheless, other
studies succeeded in combining different simulators
to represent more complex systems, specially when
different model resolutions were combined (Macedo
et al., 2013; Perrotta et al., 2014; Perrotta et al., 2012).
Many simulation models have been studied lately
to better instil safety to road users, especially pedes-
trians at cross walks. Nonetheless, these models do
not include the non-verbal communication aspects, in
which most road users rely on, as discussed in parts
2.1.1 and 2.1.2.
2.2.2 Driver-driver Interactions
Research has also been done in order to model and
simulate traditional models (3) in traffic. As stated
above, these models focus on the interactions between
drivers, such as lane changing and car following. In
(Morton et al., 2017), authors also refer methods suit-
able to learn such driving models from real-world
data. This, however, is not within the scope of this
work.
3 PARTIALLY AUTONOMOUS
TRAFFIC INTERACTIONS
New communication requirements emerge when au-
tonomous vehicles are introduced into the urban con-
text. Certainly they are expected to overcome many
of today’s traffic limitations; however, the transi-
tion between vehicles steered by humans to fully au-
tonomous traffic poses enormous challenges calling
for appropriate attention.
3.1 Understanding the Problem
As already stated, people are often dependant on and
influenced by other people’s behaviour. In (Laznyi
and Marczi, 2017) authors state that the level of dis-
positional trust towards autonomous systems among
young adults is low. As when trusting other hu-
mans, trusting smart systems depends on those sys-
tems sharing the users goals. Moreover, to gain opti-
mal acceptability, goals of the user should be shared
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
426

by the smart systems, and smart systems should pro-
vide information to their user (Verberne et al., 2012).
Also, authors argue that experiencing highly auto-
mated driving within driving simulators can increase
self-reported trust in automation. However, although
elsewhere (Choi and Ji, 2015) authors state that per-
ceived usefulness and trust are major important deter-
minants of intention to use autonomous vehicles, and
that three constructs (system transparency, technical
competence, and situation management) have a posi-
tive effect on trust, this study identified that trust has
a negative effect on perceived risk.
In order to reach a full autonomous scenario,
which will be publicly available in the near future,
there will be a time between non-autonomous traffic
and full-autonomous traffic, in which we need to cope
with the challenges of partially autonomous traffic. It
can be assumed that such transition will not be in-
stantaneous. This being said, it cannot be assumed
that humans will be completely out of the scene or
off the roads during this transitory period (Driggs-
Campbell et al., 2017). Instead, finding humans’
place in this new scenario and understand how we will
react to driverless cars is imperative, not only when
we are driving, but also when we are crossing a road
or even when travelling as passengers inside these
vehicles. In (Driggs-Campbell et al., 2017) authors
present a literature review of relevant driver mod-
elling frameworks for cooperative driving and present
a non-parametric driver model that can be adapted to
many different applications in the so-called human-
in-the-loop predictions.
Furthermore, connected cars, which are net-
worked to traffic sensory and on-line information
about road conditions, will take the driver’s seat, act-
ing in a way that the driver will not always understand
or will find counter intuitive. Elsewhere (Koo et al.,
2015), authors suggest that autonomous cars need ap-
propriate means to explain their actions to the drivers
so as to increase overall safety and become more reli-
able.
In particular, and we will give special attention
to this scenario, pedestrians usually seek interactions
such as eye contact, posture, and gestures. Simulta-
neously, as automation is increasing, people become
unable to rely on this crucial factor — i.e. human
feedback. Thus, new ways of communicating are
necessary in order to warrant safe interactions within
autonomous-vehicle settings. For this, pedestrians
willingness to cross the street and their emotional
state in encounters with a seemingly autonomous ve-
hicle need to be explored. Studies show that pedes-
trians willingness to cross the street decreases with
an inattentive driver. In contrast, eye contact with
the driver leads to calmer, more comprehensive and
workable interactions (Lundgren et al., 2017). On the
other hand, gestures are usually difficult to interpret
due to cultural variations. For instance, hand gestures
can be used for counting or expressing other mes-
sages, varying from culture to culture. Since these
elementary gestures are not universal or unambigu-
ous, then a work into the universality of movement
gestures is also necessary (Gupta et al., 2016).
To further explore the consequences of these en-
counters, a proof-of-concept study was implemented
at a cross walk and a traffic circle. In the study, par-
ticipants encountered a vehicle that appeared to have
no driver — the Ghost Driver experience. This vehi-
cle was driven by a human confederate hidden inside
a car seat costume. Pedestrians who encountered the
car reported that they saw no driver, yet they man-
aged interactions smoothly, except when the car mis-
behaved by moving into the cross walk just as they
were about to cross. In light of the aforementioned,
practices such as making eye contact or making hand
gestures will no longer be a reliable means of commu-
nication. Road users cannot observe any head move-
ments indicating that they have been noticed to ad-
vance. This is not only connected to the pedestri-
ans’ safety but also to their comfort when walking
on the road. Not only can pedestrians increase their
own safety by interacting with car drivers through
signals and gaze, but also with cyclists, since drivers
tend to make decisions about their intentions by look-
ing at the cyclist’s face. A driver’s gaze goes first
onto the face of a cyclist and remains there for longer
periods than any gaze directed at the cyclist’s hand
signs (Rothenbucher et al., 2016). A Wizard of Oz
(WOZ) methodology for evaluating these interactions
with autonomous vehicles has also been implemented
more than once (Lundgren et al., 2017; Rothenbucher
et al., 2016). The WOZ technique enables unimple-
mented technology to be evaluated by using a human
to simulate the responses of a system. The wizard —
a person who pretends to act as an autonomous sys-
tem — is hidden, observing the user’s actions. The
wizard then simulates the system’s responses in real
time. Since participants do not suspect that a wiz-
ard, i.e. a human entity, was behind the feedback
they were receiving, the method can be said to be
successful. Also, this is an easily implemented but
nonetheless powerful tool for gathering information
at this early stage of the shift to an autonomous traf-
fic, as it requires little software resources to yield a
well-presented deception. The WOZ method sim-
ulated interaction in realistic traffic situations, al-
though achieving repeatability in such dynamic set-
tings can be challenging sometimes (Rothenbucher
On Social Interactions and the Emergence of Autonomous Vehicles
427

et al., 2016). In another experience (Lundgren et al.,
2017), all pedestrians (N = 13 of 13) that met the
standstill vehicle stated that they would only cross the
street once they had established eye contact with the
driver. The willingness to cross was reduced when
the driver was talking on the phone, (N = 10 of 13).
But it was further reduced when the driver was read-
ing a newspaper (N = 5 of 13), or even when there
was no driver present in the vehicle (N = 5 of 13). All
pedestrians (N = 13 of 13) stated that eye contact with
the driver, and the driver behaviour and interaction in
general, changed the experience completely. When
asked about the safest encounter, all pedestrians (N =
13 of 13) affirmed they felt most safe when they got
eye contact with the driver (Lundgren et al., 2017).
3.2 Possible Solutions
To sustain perceived safety when eye contact is dis-
carded due to vehicle automation some solutions have
lately been proposed. For instance, a project treated
autonomous vehicles as social robots; instead of es-
tablishing eye contact, humans could acknowledge
vehicles’ intentions through audio and visual cues.
This could assure other road users of the vehicle’s in-
tentions. Without this assurance, road users can eas-
ily get scared while walking in shared zones. The
pedestrian has no clear way of ensuring that the driver
sees him/her moving around the vehicle as there is
no driver to interact with. And people inside an au-
tonomous vehicle have no sure way of knowing that
the car is noticing the pedestrian and whether has it
the intention to move on or slow down and let the
pedestrian cross. As a result, the pedestrian may not
be the only one not feeling safe with the idea of au-
tonomous vehicles; passengers can feel scared too!
So far a number of researchers have studied ways
of turning the vehicle more sociable. This is il-
lustrated by showing motion intentions of the au-
tonomous vehicles, such as the route destination and
mission state, through a LED message board. An
audio cue, as firstly referred, in the form of music
has also been broadcast through the speaker while the
vehicle was driving autonomously to capture the at-
tention of the surrounding pedestrians and other road
users, who otherwise might not notice that the vehi-
cle did not have a human driver. This LED strip to
broadcast obstacle detections from a LiDAR (remote
sensing technology that measures distance by illumi-
nating a target with a laser and analysing the reflected
light) was found to be an effective method to acknowl-
edge pedestrian presence (Florentine et al., 2016). A
research has been carried out in order to catalogue
the gestures of transport authorities of different states.
This classification of hand and body movements has
not only contributed to understanding the psychology
of such gestures, but also to the categorisation of hand
rules. This research can provide revelations about the
various elements involved in such gestures, which in-
clude arm movement, eye behaviour, body posture
and head movement (Lundgren et al., 2017).
3.3 Future Approaches
Researchers say there is a need to draw conclusions
about other traffic situations (e.g. crowded crossings,
turning manoeuvres) and other cultural settings, since
one of the WOZ tests were carried out in a small
Swedish population (Lundgren et al., 2017). Sim-
ilar methods to the Ghost Driver should be imple-
mented to investigate other types of encounters with
an autonomous vehicle. In particular, pedestrians’ be-
haviour when coming across an autonomous car in
which the only visible person in the car displays atyp-
ical behaviour inside the car. From eating, to reading,
applying make-up or any other kind of leisure activ-
ity in the autonomous vehicle instead of driving, it
should be noted how pedestrians respond to the per-
son in the car and whether they would attempt to com-
municate back with the pedestrian. Since these people
do not necessarily know it is an autonomous vehicle,
it might be a cause for concern when the person in-
side the car is doing an unrelated task. Finally, the
research about the gestures could extend the study to
peoples interpretation of these gestures. Future work
will also address the question whether any of these
agreed gestures are also used by pedestrians and hu-
man drivers. Therefore, autonomous vehicles need to
understand the intentions beyond gesture signs.
4 CONCLUSIONS
Taking all this into account, interaction in traffic will
change as the number of autonomous vehicles circu-
lating on the roads increases. Nowadays, pedestrians’
feeling of being safe is much dependent on eye con-
tact and other non-verbal forms of communication. In
a near future, road users will have to communicate
with autonomous vehicles. Not only pedestrians but
also cyclists and other drivers will have to interpret
signals from a machine to know how to proceed in
traffic.
This literature review aims to show how road users
interact with each other, approaching vehicles’ inter-
actions’ traditional models such as car-following and
lane-changing, pedestrian-driver behaviour at both
marked and unsignalised cross walks.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
428

Current concerns are discussed as well as are
the latest research done on social interactions with
autonomous vehicles. In our opinion, the future
can bring new approaches to address these concerns,
which may vary from audio and visual cues on the au-
tonomous vehicle to real-time body language recogni-
tion. Finally, some ideas of future work that we con-
sidered worth investigating are presented at the end
of the recent studies section. These ideas range from
new data collections about other traffic situations, dif-
ferent cultural settings and its analysis to new fake en-
counters that test people’s reactions.
We believe this paper helps understanding the
biggest concerns that are triggered when we talk
about inserting autonomous vehicles in a mostly
human-based traffic. In addition, it has highlighted
which questions need answers and further investi-
gation. Indeed, as future work, we would like to
explore how tinted windows affect the communica-
tion between the driver and the other road users (i.e.
other drivers, cyclists and pedestrians). Due to such
glass characteristics, the light reflected prevents peo-
ple who are outside the car to easily see the driver’s
gestures and expressions. We believe that testing the
interaction between a driver in a tinted-windowed car
and a pedestrian at a cross walk, as well as another
driver, can be an easy way of testing people’s be-
haviour in a situation in which it is hard for them to
establish eye contact or to get another kind of feed-
back from other gestures, in order to better manage
their own safety.
Also, this can be useful to test the results of us-
ing the headlights of an autonomous vehicle as a
means to signal pedestrians or any other road user
about the vehicle’s intentions. Different communica-
tion metaphors can be easily tested even with low-
cost driving simulators (Gonc¸alves et al., 2012; Alves
et al., 2013; Gonc¸alves et al., 2014), in which sub-
jects play drivers and pedestrians in virtual environ-
ments may give important insights into how such in-
teractions emerge when visual clues are not present.
Once we get the data about people’s behaviour in a
situation in which it is hard for them to establish eye
contact or to get another kind of feedback, we aim to
build a dataset that we intend to use for a social sim-
ulation approach to refine the existing models or even
find a more appropriate behavioural mining approach.
Ideally, mining large volumes of recorded data to
extract useful information about behaviour patterns
of individuals and groups of individuals in the area
under study, and monitoring the scene in real-time
in order to provide an immediate response would be
a desirable outcome. Learning spatio-temporal be-
haviour patterns from a public space is frequently of
intrinsic commercial or security interest for users to
gain more knowledge about activity patterns in pub-
lic spaces they are responsible for (Hospedales et al.,
2012). Having said that, we could use behavioural
mining to identify typical behaviours in pedestrian-
driver social interactions. The nature of behavioural
patterns in a given scenario could be defined by a wide
variety of factors, affecting the activity of a single ob-
ject both over space and over time. Building models
general and flexible enough to represent all these as-
pects of behaviour is an open research question need-
ing further investigation (Hospedales et al., 2012). In
the next steps of our research, we intend to study these
topics and also integrate social simulation tools to ve-
hicle simulators (Pereira and Rossetti, 2012) so as to
investigate how autonomous cars can be prepared to
communicate with pedestrians and other road users.
Furthermore, outcomes of research in this emerging
field may yield enormous contributions to improving
legislation and traffic regulatory directives in the new
age of autonomous vehicles.
REFERENCES
Alves, P. R. J. A., Gonc¸alves, J., Rossetti, R. J. F., Oliveira,
E. C., and Olaverri-Monreal, C. (2013). Forward col-
lision warning systems using heads-up displays: Test-
ing usability of two new metaphors. In 2013 IEEE
Intelligent Vehicles Symposium (IV), pages 1–6.
Chen, P., Wu, C., and Zhu, S. (2016). Interaction be-
tween vehicles and pedestrians at uncontrolled mid-
block crosswalks. Safety Science, 82:68–76.
Choi, J. K. and Ji, Y. G. (2015). Investigating the impor-
tance of trust on adopting an autonomous vehicle. In-
ternational Journal of HumanComputer Interaction,
31(10):692–702.
Driggs-Campbell, K., Govindarajan, V., and Bajcsy, R.
(2017). Integrating intuitive driver models in au-
tonomous planning for interactive maneuvers. IEEE
Transactions on Intelligent Transportation Systems,
18(12):3461–3472.
Earl, R., Falkmer, T., Girdler, S., Dahlman, J., Rehnberg,
A., and Falkmer, M. (2016). Visual search strategies
of pedestrians with and without visual and cognitive
impairments in a shared zone: A proof of concept
study. Land Use Policy, 57:327–334.
Florentine, E., Ang, M. A., Pendleton, S. D., Andersen,
H., and Ang, Jr., M. H. (2016). Pedestrian notifica-
tion methods in autonomous vehicles for multi-class
mobility-on-demand service. In Proceedings of the
Fourth International Conference on Human Agent In-
teraction, pages 387–392, New York, NY. ACM.
Freedman, M., Zador, P., and Staplin, L. (1993). Effects
of reduced transmittance film on automobile rear win-
dow visibility. Human Factors, 35(3):535–550.
Gonc¸alves, J., Rossetti, R. J. F., and Olaverri-Monreal, C.
(2012). Ic-deep: A serious games based application to
On Social Interactions and the Emergence of Autonomous Vehicles
429

assess the ergonomics of in-vehicle information sys-
tems. In 2012 15th International IEEE Conference on
Intelligent Transportation Systems, pages 1809–1814.
Gonc¸alves, J. S. V., Rossetti, R. J. F., Jacob, J., Gonc¸alves,
J., Olaverri-Monreal, C., Coelho, A., and Rodrigues,
R. (2014). Testing advanced driver assistance sys-
tems with a serious-game-based human factors anal-
ysis suite. In 2014 IEEE Intelligent Vehicles Sympo-
sium Proceedings, pages 13–18.
Gupta, S., Vasardani, M., and Winter, S. (2016). Con-
ventionalized gestures for the interaction of people in
traffic with autonomous vehicles. In Proceedings of
the 9th ACM SIGSPATIAL International Workshop on
Computational Transportation Science, IWCTS ’16,
pages 55–60, New York, NY. ACM.
Hospedales, T., Gong, S., and Xiang, T. (2012). Video be-
haviour mining using a dynamic topic model. Inter-
national Journal of Computer Vision, 98(3):303–323.
Koo, J., Kwac, J., Ju, W., Steinert, M., Leifer, L., and
Nass, C. (2015). Why did my car just do that? ex-
plaining semi-autonomous driving actions to improve
driver understanding, trust, and performance. Interna-
tional Journal on Interactive Design and Manufactur-
ing (IJIDeM), 9(4):269–275.
Laznyi, K. and Marczi, G. (2017). Dispositional trust
x2014; do we trust autonomous cars? In 2017 IEEE
15th International Symposium on Intelligent Systems
and Informatics (SISY), pages 000135–000140.
Lehsing, C., Benz, T., and Bengler, K. (2016a). Insights
into interaction - effects of human-human interaction
in pedestrian crossing situations using a linked simu-
lator environment. IFAC-PapersOnLine, 49(19):138–
143.
Lehsing, C., Fleischer, M., and Bengler, K. (2016b). On the
track of social interaction - a non-linear quantification
approach in traffic conflict research. In 2016 IEEE
19th International Conference on Intelligent Trans-
portation Systems (ITSC), pages 2046–2051.
Lundgren, V., Habibovic, A., Andersson, J., Lagstrm, T.,
Nilsson, M., Sirkka, A., Fagerlnn, J., Fredriksson, R.,
Edgren, C., Krupenia, S., and Salur, D. (2017). Will
there be new communication needs when introducing
automated vehicles to the urban context? Advances in
Intelligent Systems and Computing, 484:485–497.
Macedo, J., Kokkinogenis, Z., Soares, G., Perrotta, D., and
Rossetti, R. J. F. (2013). A hla-based multi-resolution
approach to simulating electric vehicles in simulink
and sumo. In 16th Int. IEEE Conf. on Intelligent
Transportation Systems (ITSC), pages 2367–2372.
Morton, J., Wheeler, T. A., and Kochenderfer, M. J. (2017).
Analysis of recurrent neural networks for probabilistic
modeling of driver behavior. IEEE Transactions on
Intelligent Transportation Systems, 18(5):1289–1298.
Munigety, C. R. and Mathew, T. V. (2016). Towards behav-
ioral modeling of drivers in mixed traffic conditions.
Transportation in Developing Economies, 2(1):6.
Nagahama, A., Yanagisawa, D., and Nishinari, K. (2017).
Dependence of driving characteristics upon follower-
leader combination. Physica A: Statistical Mechanics
and its Applications, 483:503 – 516.
NHTSA (2012). Traffic safety facts 2010: A compila-
tion of motor vehicle crash data from the fatality
analysis reporting system and the general estimates
system. Technical report, National Highway Traffic
Safety Administration, Washington, DC.
Oh, C., Choi, J., and Park, S. (2017). In-depth understand-
ing of lane changing interactions for in-vehicle driving
assistance systems. International Journal of Automo-
tive Technology, 18(2):357–363.
Pereira, J. L. F. and Rossetti, R. J. F. (2012). An integrated
architecture for autonomous vehicles simulation. In
Proceedings of the 27th Annual ACM Symposium on
Applied Computing, SAC ’12, pages 286–292, New
York, NY, USA. ACM.
Perrotta, D., Macedo, J. L., Rossetti, R. J., de Sousa,
J. F., Kokkinogenis, Z., Ribeiro, B., and Afonso, J. L.
(2014). Route planning for electric buses: A case
study in oporto. Procedia - Social and Behavioral Sci-
ences, 111:1004 – 1014. Transportation: Can we do
more with less resources? 16th Meeting of the Euro
Working Group on Transportation Porto 2013.
Perrotta, D., Ribeiro, B., Rossetti, R. J., and Afonso, J. L.
(2012). On the potential of regenerative braking of
electric buses as a function of their itinerary. Procedia
- Social and Behavioral Sciences, 54:1156 – 1167.
Rossetti, R. J. F., Almeida, J. E., Kokkinogenis, Z., and
Gonc¸alves, J. (2013). Playing transportation seri-
ously: Applications of serious games to artificial
transportation systems. IEEE Intelligent Systems,
28(4):107–112.
Rothenbucher, D., Li, J., Sirkin, D., Mok, B., and Ju,
W. (2016). Ghost driver: A field study investigat-
ing the interaction between pedestrians and driver-
less vehicles. 25th IEEE International Symposium on
Robot and Human Interactive Communication, RO-
MAN 2016, pages 795–802.
Sucha, M., Dostal, D., and Risser, R. b. (2017). Pedestrian-
driver communication and decision strategies at
marked crossings. Accident Analysis and Prevention,
102:41–50.
United Kingdom Government. Tinted vehicle windows: the
law. https://www.gov.uk/tinted-vehicle-window-rules.
Last accessed: 2018-02-06.
Verberne, F. M. F., Ham, J., and Midden, C. J. H. (2012).
Trust in smart systems: Sharing driving goals and
giving information to increase trustworthiness and ac-
ceptability of smart systems in cars. Human Factors,
54(5):799–810. PMID: 23156624.
Xiaorui, W. and Hongxu, Y. (2013). A lane change model
with the consideration of car following behavior. Pro-
cedia Soc Behav Sci, 96:2354–2361.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
430
