
When Should the Chicken Cross the Road?
Game Theory for Autonomous Vehicle - Human Interactions
C. W. Fox
1,2,3
, F. Camara
3,2
, G. Markkula
3
, R. A. Romano
3
, R. Madigan
3
and N. Merat
3
1
Ibex Automation Ltd, U.K.
2
School of Computer Science, University of Lincoln, U.K.
3
Institute for Transport Studies, University of Leeds, U.K.
Keywords:
Autonomous Vehicles, Human Factors, Game Theory.
Abstract:
Autonomous vehicle localization, mapping and planning in un-reactive environments are well-understood, but
the human factors of complex interactions with other road users are not yet developed. This study presents an
initial model for negotiation between an autonomous vehicle and another vehicle at an unsigned intersections
or (equivalently) with a pedestrian at an unsigned road-crossing (jaywalking), using discrete sequential game
theory. The model is intended as a basic framework for more realistic and data-driven future extensions. The
model shows that when only vehicle position is used to signal intent, the optimal behaviors for both agents
must include a non-zero probability of allowing a collision to occur. This suggests extensions to reduce this
probability in future, such as other forms of signaling and control. Unlike most Game Theory applications in
Economics, active vehicle control requires real-time selection from multiple equilibria with no history, and we
present and argue for a novel solution concept, meta-strategy convergence, suited to this task.
1 INTRODUCTION
Automated vehicle (AV) localization, mapping, and
planning have recently become practically feasible
due to price falls in computer processing power. The
problem of simultaneous localization and mapping
(SLAM) is well understood (Thrun et al., 2005),
and despite its exact solution being NP-hard (Soto-
Alvarez and Honkamaa, 2014), good approximati-
ons exist such as particle filtering, which make use
of large compute power to draw samples near soluti-
ons. Route planning in non-interactive environments
also has well known tractable solutions such as the
A-star algorithm. Given a route, localizing and cont-
rol to follow that route then becomes a similar task to
that performed by the 1959 General Motors Firebird-
III self-driving car (Bidwell et al., 1959), which used
electromagnetic sensing to follow a wire built into the
road. Such path following, using wires or SLAM, can
then be augmented with simple safety logic to stop
the vehicle if any obstacle is in its way, as detected by
any range sensor. Free and open source systems for
this level of ‘self-driving’ are now widely available
(Kato et al., 2015).
In contrast, problems that these vehicles will face
around interacting with other road users are much har-
der both to formulate and solve. Autonomous vehi-
cles do not just have to deal with inanimate objects,
sensors, and maps. They have to deal with other
agents, currently human drivers and pedestrians and
eventually other autonomous vehicles, all of which
may be at least as “intelligent” and “rational” as they
are, and in competition with them for space, time and
priority on the road. Recent studies have shown (Ma-
digan et al., tion) that in trials of autonomous mi-
nibuses, pedestrians knowingly obstruct autonomous
vehicles around once every three hours – enough to
occur once every day on a long commute. Once hu-
man road users know that AV safety systems are pro-
grammed to stop if any obstacle is in their path, they
can quickly take advantage of this to push in front of
the AV and take priority. If this becomes common
knowledge across a whole city, AVs will make little
or no progress because they will be forced to yield at
every single interaction.
Understanding and predicting other agents’ beha-
vior, especially when that includes understanding and
predicting their understandings and predictions of on-
eself, and of one’s understanding and predictions of
them, ad infinitum, is a massively more complex pro-
blem than inferring locations and maps. It may even
be formally uncomputable as it requires predictions
of and actions based on one’s future behavior (via the
other party’s models of it), which are well known in
Computer Science to lead to paradox and uncomputa-
bility as in G
¨
odel’s theorem and the Halting problem
Fox, C., Camara, F., Markkula, G., Romano, R., Madigan, R. and Merat, N.
When Should the Chicken Cross the Road?.
DOI: 10.5220/0006765404310439
In Proceedings of the 4th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2018), pages 431-439
ISBN: 978-989-758-293-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
431

(Velupillai, 2009).
Game Theory provides some framework for ma-
naging such self-referential decisions, but appears to
be incomplete as a prescriptive theory when multiple
equilibria are present. Solutions may be formally
computationally intractable (NP-hard) in some cases
(Papadimitriou and Roughgarden, 2005). And when
multiple equilibria are present, it is not clear whether
game theory or any other rational line of argument
will ever be able to even formulate the problems, let
alone solve them. A simple example of game theory
is the classic game ‘Chicken’, in which two cars
each drive straight towards each other at speed or
swerve away, and the nominal loser (the ‘chicken’)
is the one to swerve, but both players are much
bigger losers if they both do not swerve, and collide.
The classic formal Chicken model makes the strong
and unrealistic assumption that the straight/swerve
decision is made as a pair of simultaneous action
selections, (a
Y
,a
X
) by both players (Y and X) so that
the payoff values given the actions can be represented
as a 2×2 matrix of pairs (v
Y
a
Y
,a
X
,v
X
a
Y
,a
X
) :
Y \ X a
X
=swerve a
X
=straight
a
Y
=swerve (0,0) (-1, +1)
a
Y
=straight (+1, -1) (-100,-100)
The central concept of game theory is equilibrium
(Nash et al., 1950) which for a 2×2 matrix game as
above describes any pair of strategies for the two play-
ers such that if either player knew the other’s they
would not change their own. Conceptually, if equili-
bria exist then one can usually be found via ‘fictitious
play’, i.e. each player simulates her and her oppo-
nent’s behaviour in a virtual world where they know
each other’s strategies, until they converge. Strategies
are probability distributions over actions. If a game
has only one equilibrium then it is optimal for both
players to play its strategies. When there are multi-
ple equilibria, the question of what to do is less clear.
Historically, Game Theory has focused on description
of observed behaviors (how do people act? Why did
the chicken cross the road?) and mechanism design
(how can government make them act?) rather than
prescription (when should we act? When should the
chicken cross the road?) of real-time action selection
by agents. This is due to its roots in economics and
mathematics rather than robotics. This distinction be-
comes crucial when multiple equilibria are present in
a game. The descriptive school would say that any
of the equilibria are valid descriptions of what might
be observed in human behavior data (Ciliberto and
Tamer, 2009). The ‘mechanism design’ school typi-
cally argues (Palfrey, 1990) that the problem of equi-
librium selection is ‘unpleasant’ and should be avoi-
ded by changing the rules of the game to produce
a single unambiguous equilibrium which all players
can usefully use. For cases where the equilibrium
selection problem cannot be avoided in these ways,
many different solution concepts (aka. ‘equilibrium
refinements’) have been proposed and debated (Bin-
more, 2007) for choosing between them. Two of these
are widely acknowledged to be ‘rational’ when app-
lied in order: 1. Dominance - Clearly, if an equili-
brium is worse for all players than at least one other,
then we discard it without question; 2. Evolutionary
stability / symmetry (ESS) - Assume everyone in the
world was to use the same equilibrium as me. Discard
equilibria where this would not work. These concepts
help to reduce the number of potential multiple equi-
libria but do not guarantee reduction to a unique one.
To discard further equilibria, more controversial con-
cepts have been debated (Binmore, 2007) including:
1. Trembling hand stability - Assume other player has
a small epsilon probability of making a mistake; pre-
fer equilibria that we converge back to if that happens;
2. Basin size (aka. ‘risk dominance’). Assume both
players use fictitious play starting from maximum en-
tropy strategies. Consider which equilibrium attracts
from the most start points, and this thus most likely
to occur. 3. Social maximum (aka. ‘payoff domi-
nance’) Choose the equilibrium with the largest sum
of payoffs to all players (even if I am worse off than
in others). 4. Other arbitrary conventions. Such as
using the action with the first letter in the alphabet.
These work only if all players agree to use them in
advance or can be argued to possess social knowledge
to make them confident that others will choose the
same ones as them. This appears to be the point where
the mathematics of Game Theory ends, and philoso-
phical debate about the meaning of ‘rationality’ takes
its place (Binmore, 2007). However, as autonomous
vehicle engineers building real-time control systems,
we must make some action selection in these situati-
ons, somehow.
Chicken is intended as a simple educational exam-
ple game and not as a model of real vehicles. This
study modifies it into a general and more realistic
vehicle interaction problem, where an AV competes
for priority with another vehicle or a pedestrian step-
ping out in front of it, and allowing them to negotiate
with one another by observing each others’ behaviour
over time. Initially we consider the simplest possible
model of this class of problems, of an AV and another
similar vehicle approaching an unmarked intersection
at speed as in fig. 1(left). This would also apply to the
case of two pedestrians meeting each other and nego-
tiating for space. We then extend it to cases where the
two players have asymmetric penalties in the event of
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
432

Figure 1: Scenario and model.
collision – modeling an AV encountering a potential
jaywalker stepping into the road, or an AV encounte-
ring a physically larger or smaller vehicle such as an
armored SUV or cyclist at an intersection. The model
proposed here is intended to be the simplest possible
which captures the dynamics of interest common to
these cases, but which can also serve as a foundation
for many more complex ones.
Game theory is used extensively in macroscopic
traffic modeling via Wardrop equilibrium in flow net-
works (Bolland et al., 1979) with focus on route se-
lection in large, economy-like, markets of many road
users rather than microscopic pairwise interactions.
Where game theory has been applied to pairwise traf-
fic decisions, it has mostly been at the level of simple
single-shot games as reviewed in (Elvik, 2014). In a
few cases such as lane-changing (Meng et al., 2016;
Kim and Langari, 2014) and merging (Kita, 1999) it
has been extended to sequential games as used here,
but not for AV-pedestrian interactions as here. The
meta-strategy convergence concept used here is no-
vel to our knowledge, as is the use of the sequential
model as a foundation for AV-human intersection and
jaywalking control.
2 METHODS
Turn-taking model. In the simplest possible model we
set up two symmetric agents (vehicles or pedestrians)
approaching an intersection as a chess-like, discrete
space, discrete speed, and discrete time, turn-taking
game, as in fig. 1(right). This does not yet use any
Game Theory because the players’ decisions are not
made at the same time. We will use it to introduce
notation and as a base to grow more detailed models.
We assume a (1 meter) grid world, with two straight
roads at right angles meeting at the intersection.
Assume one vehicle on each road, labeled
1
Y and X.
(We will later consider one player to be a pedestrian
1
We use the convention of writing Y before X, and
the orientation of the grid world of fig. 1, to match
(row,column) matrix notation.
or different types of vehicle.) Assume discrete alter-
nating turns one per second, in which one vehicle can
choose either a 1m/s or 2m/s speed, i.e. move either
one box forward or two boxes forward. (This ensures
a finite game, because the vehicles are guaranteed
to move closer to the intersection at each step.
Formally, y and x are decreasing variants.) 2m/s is a
slow real world speed but is chosen to coincide with
simple integer movements of 1 or 2 boxes per turn.
(The reader may wish to multiply all distances and
speeds by 10 if they wish to think in more real-world
units.) Write y for Y’s distance in meters to the
intersection, x for X’s distance in meters. Assume a
crash occurs if the vehicles are in the same square
or if one vehicle is in the intersection square and the
other moves through it in a single step. (This may
be implemented by treating (y,x) ∈ {(0,0), (1,1)} as
crash states, and all other states with one agent at 0
or 1 as non-crash endgame states, avoiding the need
to model negative positions beyond the intersection.)
We assign (negative) utility U
crash
to each player for
a crash; otherwise −U
time
T where T is the number
of seconds it takes to reach the intersection from the
start of the game, and U
time
is the (positive) value of
saving one second of travel time. Assume that both
players have identical utility functions, and know this
to be the case. This game can be played, for example,
as a board game between two human players. The
turn-taking model can be solved by a standard (Rich
and Knight, 1991) backward induction max-max
tree search as in algorithm 1, where the boolean b
represents which player’s turn is current, t is time
elapsed, y and x are the two players’ positions,
and the results are expected value pairs for the two
players, v
y,x,t,b
=(v
Y
y,x,t,b
,v
X
y,x,t,b
).
Sequential chicken model. If we replace turn-
taking by simultaneous action selection by both
players at each discrete 1s turn, the model transforms
into a sequence of Game Theoretic matrix games
(“sub-games”). This is equivalent to a board game
where both players write down their speed choice (1
or 2) in secret then reveal them and make the moves
together rather than in turns. The payoffs of any
sub-game at state (y > 1,x > 1,t) become recursive
functions of the next states, (y − a
Y
,x − a
X
,t + 1),
where a
Y
,a
X
∈ {1, 2} are the speed selection actions
for speeds of 1m/s and 2m/s. As in the turn-taking
model, these inductive values are based on the end-
game states when one or both vehicles have reached
the intersection (considered to occur at square 0 or
1). Consider the value v
y,x,t
= (v
Y
y,x,t
,v
X
y,x,t
) of the
sub-game when the game is in state (y,x,t). The in-
duction relation for this sub-game’s payoff matrix is,
When Should the Chicken Cross the Road?
433

v
y,x,t
= v(
v(y − 1,x − 1,t + 1) v(y − 1,x − 2,t + 1)
v(y − 2,x − 1,t + 1) v(y − 2,x − 2,t + 1)
)
and is computable via standard matrix Game Theory.
Optimal mixed strategies, where they exist, and re-
sulting state probabilities given an initial start state,
for this model are shown in fig. 2.
Algorithm 1
world_value((y,x,t,b)) =
if y==x==0 or y==x==1
or (y==1 and x==0) or (y==0 and x==1)
or (y==0 and x==-1) or (y==-1 and x==0):
(-100,-100) #crash
if y<=0 or x<=0:
(-t-y/2 , -t-x/2) #someone arrives
if b: #recursion
mymax(world_value((y-2,x,t+1,False)),
world_value((y-1,x,t+1,False)))
if not b: #recursion
yourmax(world_value((y, x-2, t+1, True)),
world_value((y, x-1, t+1, True)))
Asymmetric utility model. A final model asks what
happens if the two players have different collision uti-
lities. This occurs for example if one player has a he-
avier/safer car than the other, such as an SUV (Sports
Utility Vehicle). Or if one player is a weaker road user
such as a cyclist, or a pedestrian negotiating to cross
the road in a conflict zone in front of our AV. Will
even a small change in these utilities break the sym-
metry of the sequential chicken model and tip the ba-
lance of who yields? If so, this would give a rational
justification for the purchase of heavy vehicles such
as SUVs: the intent of such purchases is not to actu-
ally get into collisions and benefit from reduced da-
mage, but rather to maintain the possibility, however
remote, of such a disaster, and exploit the backward
induction from it to obtain concessions in more be-
nign possible worlds, namely of the other player yiel-
ding. Purchase of an SUV would then be rational,
reducing the cost of time delays to the owner. (There
is of course then a higher level game when the other
road users can buy similar vehicles, beyond the scope
of our present model.) For simplicity we retain the as-
sumption that both players have the same time delay
utilities, U
time
as in the previous model, but we now
consider scenarios where one player is stronger than
the other, as (U
Y
crash
,U
X
crash
) = (U
crash
,rU
crash
), for ra-
tios r ∈ [1,100]. When utilities become asymmetric it
is possible that more equilibria will be present, so we
switch to numerical computation of them using the
Lemke-Howson algorithm.
Meta-strategy convergence. The asymmetric chic-
ken model may have multiple equilibria which are
not fully disambiguated by dominance and ESS so-
lutions concepts. We propose a novel (to our know-
ledge) solution concept for use in solving this and ot-
her models, which we call meta-strategy convergence.
This is based on everything we currently know about
the ‘rational’ process of equilibrium pruning and se-
lection, including the absence of information in some
cases, and on a temporal ordering of rational reaso-
ning. After removing dominated and non-ESS equili-
bria, we know of no good remaining solution concepts
under the assumption that the other player is also ra-
tional. (Trembling hand, basins etc. make a diffe-
rent assumption about a fallible opponent, but for AVs
which will eventually interact with other autonomous
vehicles, we want all players to be completely mecha-
nized and rational.) In the absence of any other way
to select from the remaining equilibria’s strategies, we
form a new meta-strategy which chooses one of them
from a flat (maximum entropy) prior. By symmetry,
there is no way to prefer any over any other, hence
their selection probabilities must be equal, given this
state of knowledge. Curiously, this is equivalent to a
new strategy which averages the action probabilities
from each remaining strategy, yet is not itself in that
set, because it is an average between them. Hence,
it is not a member of any equilibrium and cannot be
an optimal strategy itself. However, we have deri-
ved it step-by-step over time in a completely rational
way. It is our best solution so far at this new point in
time. As it is our best rational solution at this time,
the other player will also compute that we have re-
ached it. We then consider, as in standard fictitious
play, what the other player will do next. They will ap-
ply fictitious play to modify their strategy in response.
Then we will modify ours, and they will modify theirs
again. This will iterate until we converge, unambigu-
ously, onto a specific and uniquely defined one of the
original equilibria. This contains the rational strate-
gies for both players, and can be reached determinis-
tically by both of them without the need for any pre-
established conventions or communications. Like all
solution concepts, this is something of a philosophi-
cal rather than purely mathematical argument. It is
the best argument currently known to us so we consi-
der it to be rational for the AV control tasks.
Temporal gauge invariance. The state values of
the game theoretic models above are presented as
functions of (y,x,t) but our current implementation
makes use of an approximation to reduce the num-
ber of sub-games to be solved and thus the compu-
tation time. Because both player’s utilities are li-
near functions of time, we may (up to a small er-
ror in the ratio of crash to delay utilities) choose dif-
ferent gauges to measure time, such as considering
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
434
P(a
Y
= 1|y,x,t) =
v
Y
y−1,x−2,t+1
− v
Y
y−2,x−2,t+1
v
Y
y−1,x−2,t+1
+ v
Y
y−2,x−1,t+1
− v
Y
y−1,x−1,t+1
− v
Y
y−2,x−2,t+1
P(y
init
,x
init
,t
init
) = 1,P(y
init
,x 6= x
init
,t
init
) = 0,P(y 6= y
init
,x
init
,t
init
) = 0
P(y, x,t) =
∑
∆y∈1,2
∑
∆x∈1,2
P(a
Y
= ∆y, a
X
= ∆x|y − ∆y,x − ∆x,t − 1)P(y − ∆y, x − ∆x,t −1)
Figure 2: Strategy selection (1) and backward induction state probability (2-3) equations.
the time of every turn game to be t = 0. When the
first player, say Y , reaches the intersection, we as-
sign values (v
Y
0,x
,v
X
0,x
) = (0, −U
time
x/2) as it will take
X a further x/2 seconds to reach the intersection at
maximum speed 2m/s now the road is clear. (Also
(v
Y
1,x
,v
X
1,x
) = (0, −U
time
(x − 1)/2) to handle the other
required end states in the same way.) This simplifies
all state values and functions of them to be functions
only of (y,x). Removing dependence on t also makes
it simpler to visualize results as 2D (y, x) matrices.
3 RESULTS
Assume U
crash
= −20 and U
time
= 1 throughout. (This
values a crash as being equally bad as a 100 second
delay reaching the intersection. In the real world the
crash penalty would be much larger, but smaller ones
produce more easily visualizable results for our pre-
sent purpose.)
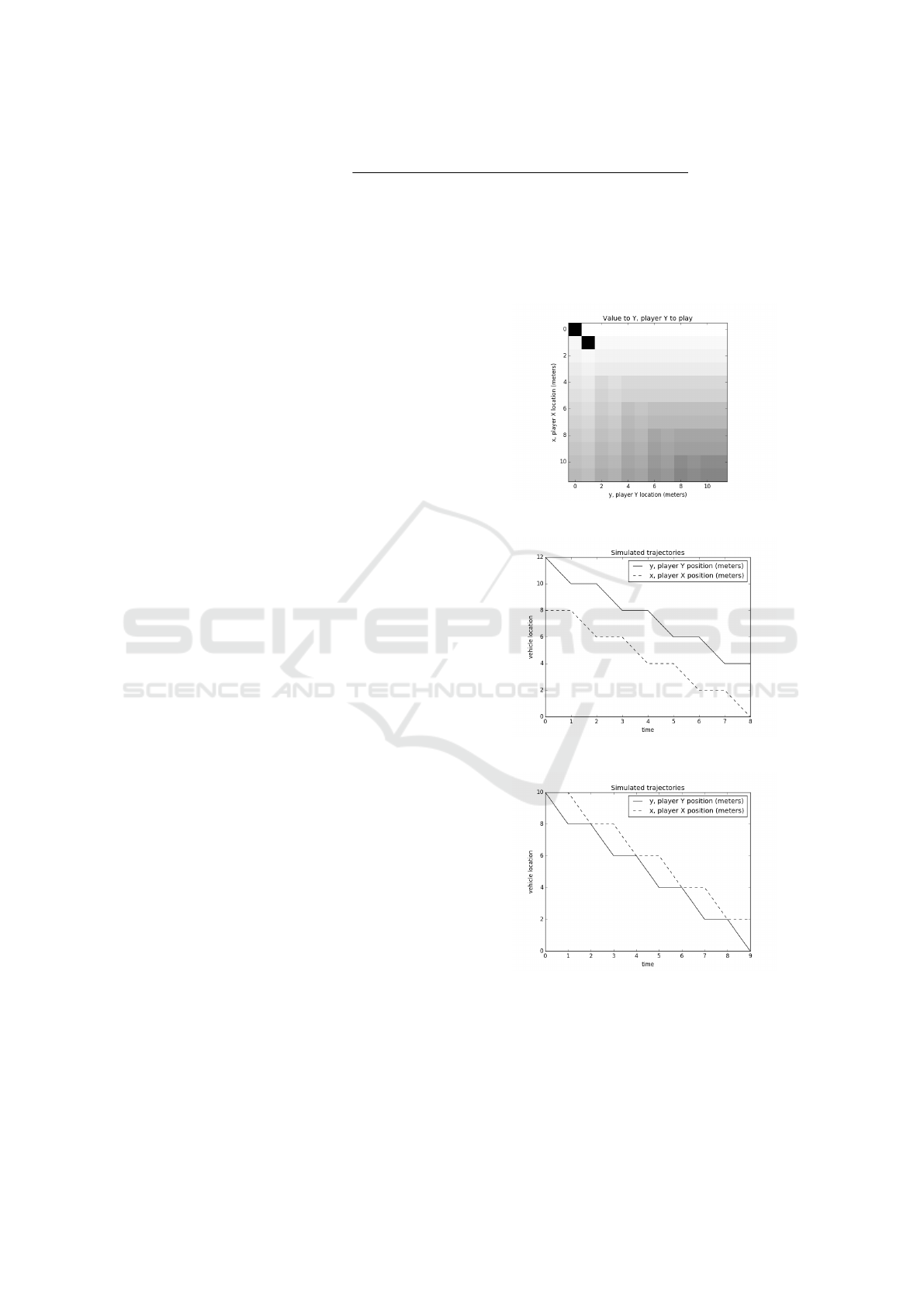
Turn-taking model. The value function for Y in
the turn-taking model is shown in fig. 3. The game
is symmetric so X has the same function when the
player’s names are swapped. The turn taking mo-
del is fully deterministic, because full information is
available to each player when it is their turn. Fig. 4
and 5 show simulated runs beginning at asymmetric
(y 6= x) and symmetric (y = x) starting states.When
the vehicles start with very different differences, e.g.
(y = 12,x = 8) they both proceed at full speed (2m/s)
and avoid each other. When started at identical dis-
tances, such as (y = 10,x = 10), the initial turn-taking
advantage becomes the tie-breaker, in both parties in-
terests. Collisions never occur in the turn-taking mo-
del due to its determinism.
Sequential chicken model. Fig. 6 shows the value
matrix for games with vehicles at up to 20m from the
intersection, and fig. 7 show the optimal strategies.
Fig. 8 shows the state space probabilities and fig.
9 shows a stochastic sample, starting with large time
(2 seconds) gap between the vehicles. All probabili-
ties in the state space are very close to 0 or 1, so the
outcome is almost deterministic as in the turn-taking
model of the same setting.
Fig. 10 shows state space probabilities when the
Figure 3: State values for turn-taking game.
Figure 4: Simulation of turn taking game, differing starts.
Figure 5: Simulation of turn taking game, equal starts.
vehicles start at identical distances y = x = 10. In this
case, the outcome is different from the turn-taking
model, because the game is fully symmetric but the
symmetry is no longer broken by turn-taking. This
means that both players must employ a policy consis-
ting of mixed strategies until the symmetry is broken
When Should the Chicken Cross the Road?
435
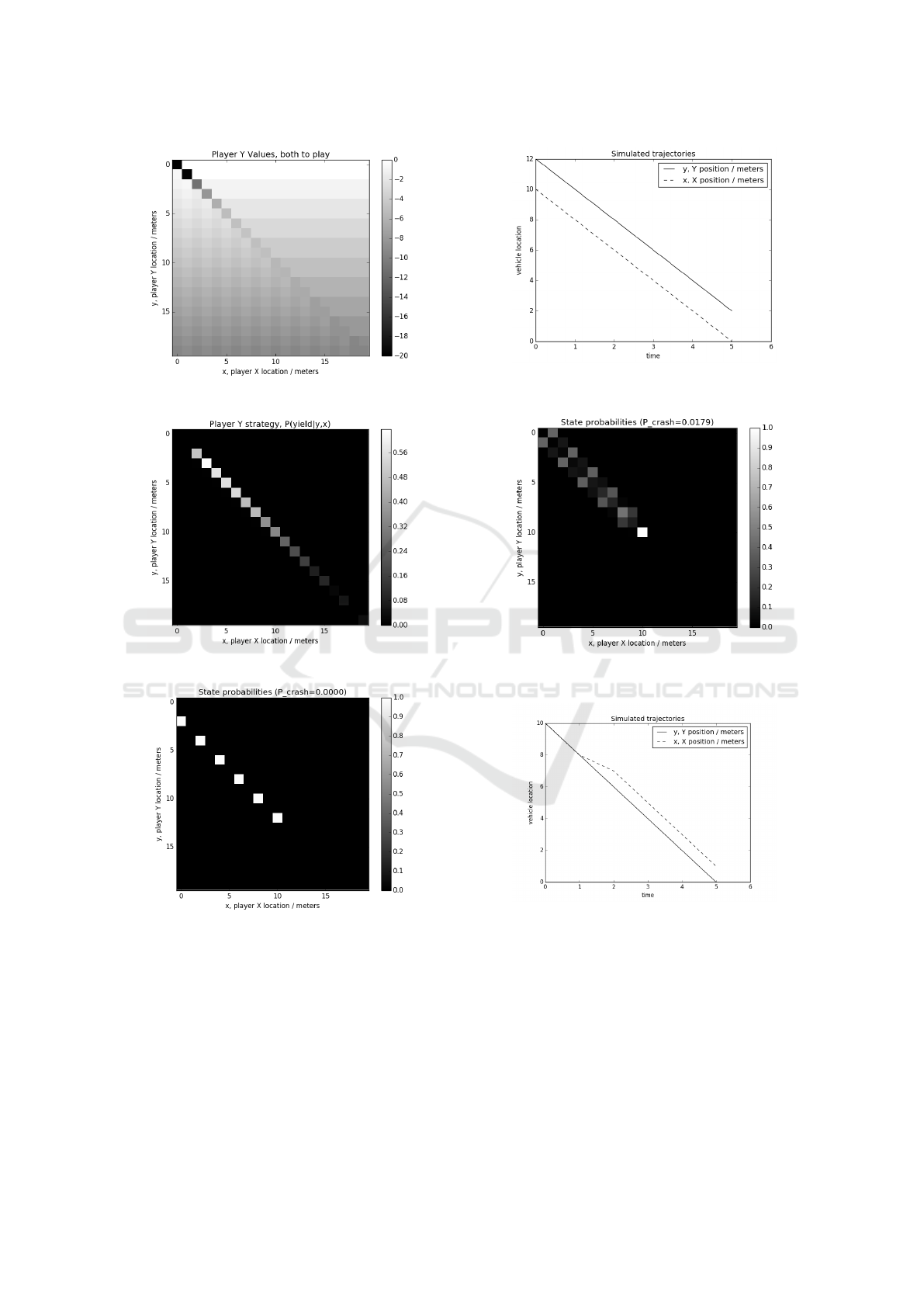
Figure 6: Sequential chicken state values.
Figure 7: Sequential chicken optimal strategy.
Figure 8: Sequential chicken state probabilities, from asym-
metric start (12,10).
by one of them. The optimal policy is to yield with
an increasing probability as distance to collision de-
creases, as seen in fig. 7. Fig. 11 is a typical sample
simulation drawn from the above state probabilities.
The most common outcome is for one vehicle to yield
at a random time, with yield probability increasing as
the vehicles draw closer.
Occasionally, as in fig. 12, both players choose
Figure 9: Sequential chicken simulation, from asymmetric
start (12,10).
Figure 10: Sequential chicken state probabilities, from sym-
metric start (10,10).
Figure 11: Sequential chicken typical simulation, from
symmetric start (10,10).
to yield at the same time, prolonging the conflict and
costing them both a delay. Very occasionally a col-
lision will occur as a result of this process, when the
players fail to negotiate priority before both reaching
the intersection together. This is rare, but must have a
non-zero probability, computed and denoted as P
crash
.
The collision probability with U
crash
= −20 is
1.79%, and with U
crash
= −100 it lowers to 0.7%. It
is interesting to test how choice of this scaling (versus
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
436

Figure 12: Sequential chicken atypical simulation, from
symmetric start (10,10).
Figure 13.
Figure 14.
the fixed U
time
=1) affects the residual collision proba-
bility, because if it has a large effect then any realis-
tic model will require scaling calibration against some
empirical data. Assuming that both players continue
to share the same utility function, and know this to
be the case, fig. 12 shows the effect of varying the
collision utility scale while keeping the time utilities
fixed.
This suggests that choices in range [-1000,0] do
have large effects on the collision probability, but pen-
alties worse than -1000 are much the same as each ot-
her in this effect. In real life, the cost of crashing a car
(even very slightly) is almost always vastly larger than
that of losing a few seconds journey time. This graph
suggests that for these realistic penalties, the precise
choice of shared collision penalty values is unimpor-
tant as long as it is over 1000 times worse than a 1
second time delay penalty.
Asymmetric utility model. As hypothesized, asym-
metric collision penalties (such as our AV encounte-
ring a strong SUV or a weak cyclist or pedestrian)
have a large effect on who must yield, and with a
very small change in the probability of actual colli-
sion. This small change is the key to breaking sym-
metry and ensuring strong probability of the weaker
player yielding fig. 12.
4 CONCLUSION
In all the models, when one agent has any small ad-
vantage it is usually – but probabilistically – optimal
for both agents for the strong one to take the priority
and the weak one to yield.
It is essential that there is some small but strictly
non-zero probability of collision being allowed to
occur as a consequence of both sides’ optimal strate-
gies. It is impossible for an AV to make any progress
at all if this is not the case, because given this kno-
wledge, every single other road user could dominate
them in any conflict - even pedestrians jumping out in
front of them for fun as seen in real-world trials (Ma-
digan et al., tion). Under these models, it is essential
that AVs are programmed with a non-zero probability
of deliberately causing a collision. This may be le-
gally difficult, as such programming may be argued
to constitute not only manslaughter but also murder,
being rationally pre-meditated by the software engi-
neer.
These results are interesting as they suggests that
purchasing SUVs, or armoring our autonomous vehi-
cle like an SUV, is a very rational strategy, not in order
to better survive the rare collisions that do occur, but
to ensure a high probability of other vehicles getting
out of our way to save our time and money on delays.
By adding armor to our own vehicle we can make the
optimal strategy for the other player yielding tend to-
wards certainty at every encounter. This also models
what will happen when our AV encounters a pede-
strian. The larger cost of collision to the pedestrian
than to our AV gives us a strong position, from which
we can act aggressively and be confident that the pe-
destrian will yield. The answer to ‘When should the
chicken cross then road?’ is ‘quite rarely if there is a
car coming, but with non-zero probability’.
We found that the way in which the models quan-
tize time is important. The turn-taking model arti-
ficially removed most of the subtly of game theory
When Should the Chicken Cross the Road?
437

by breaking its symmetry via the turn taking mecha-
nism itself. This suggests that such a quantization is
not a good model for the real world, it hides the main
problem of the scenario from the start. A related mo-
deling issue around time relates to Zeno’s Paradox. In
the models presented here, time ticks are discrete and
of equal length. It might be argued that two Zeno-like
players could choose to define each of their ticks to
have half the duration of the previous one, and thus
create an infinite number of ticks which would be cer-
tain to eventually lead to an asymmetric yield and
avoidance of collision. Formal mathematical analy-
sis of this claim could form future work, though in
practice, any human or machine compute system has
some finite limit on its computation speed.
Extended models should handle speed more re-
alistically. Rather than just two discrete speeds, a
continuum of speeds should be available, including
stopping at a complete halt. Continuous speeds may
require sampling approximations to compute over,
while complete halts allow for potentially infinite
time games which require further consideration to
model. Human drivers when faced with, for example,
a busy motorway merge, may gradually slow down
towards a halt at the end of the slip-road, while dri-
vers in their path may do the same. Perhaps under a
continuous speed model this behavior can be shown
to converge safely as everyone slows down towards a
halt and reduces both the probability and penalty of
collisions. Nevertheless, the underlying logic must
still hold - that there must be a credible threat of
a non-zero probability of causing some collision, in
order that the other party cannot take advantage of
the AV every time. Future models should add furt-
her realistic details to the framework. Real drivers
do not know each other’s utility functions and must
infer them in an information game during the inte-
raction. This could include giving and reading signals
about utility such as the model, age, colour and clean-
liness of their cars, their lateral positions on the road,
their facial expressions and hand gestures as well as
more formal car signaling via light flashing and horn
usage. Real drivers may not have Markovian time de-
lay utilities and more detailed models should allow for
time dimensioned value functions v(y,x,t) rather than
than simpler v(y, x) used here. Traffic regulations and
conventions such as legally binding and non-binding
signs and lights, and the cost of public humiliation or
legal action for being seen or recorded breaking them
should be added to modify utilities. Such models sug-
gest new signaling conventions for autonomous vehi-
cles, such as use of V2V radio communications and
virtual currencies to aid negotiations; or the use of
small AV-mounted water-pistols to induce small ne-
gative utilities in assertive pedestrians in place of ac-
tually hitting them.
ACKNOWLEDGEMENTS
This project has received funding from the European
Union’s Horizon 2020 Research and Innovation pro-
gramme under grant agreement InterACT No 723395.
REFERENCES
Bidwell, J., Cataldo, R., and Van House, R. (1959). Chassis
and control details of Firebird III. Technical report,
SAE Technical Paper.
Binmore, K. (2007). Playing for real: a text on game the-
ory. Oxford university press.
Bolland, J., Hall, M., Van Vliet, D., and Willumsen, L.
(1979). Saturn: Simulation and assignment of traffic
in urban road networks. In Proceedings of the Inter-
national Symposium on Traffic Control Systems, Ber-
keley, Calif. D, volume 2, pages 99–114.
Ciliberto, F. and Tamer, E. (2009). Market structure and
multiple equilibria in airline markets. Econometrica,
77(6):1791–1828.
Elvik, R. (2014). A review of game-theoretic models of
road user behaviour. Accident Analysis & Prevention,
62:388–396.
Kato, S., Takeuchi, E., Ishiguro, Y., Ninomiya, Y., Takeda,
K., and Hamada, T. (2015). An open approach to au-
tonomous vehicles. IEEE Micro, 35(6):60–68.
Kim, C. and Langari, R. (2014). Game theory based auto-
nomous vehicles operation. International Journal of
Vehicle Design, 65(4):360–383.
Kita, H. (1999). A merging–giveway interaction model of
cars in a merging section: a game theoretic analysis.
Transportation Research Part A: Policy and Practice,
33(3):305–312.
Madigan, R., Nordhoff, S., Fox, C., Ezzati Amini, R.,
Louw, T., Wilbrink, M., Schieben, A., and Merat, N.
(in preparation). Understanding interactions between
automated vehicles and other road users. Manuscript
in preparation.
Meng, F., su, J., Liu, C., and Chen, W.-H. (2016). Dyn-
amic decision making in lane change: Game theory
with receding horizon. In Conference: 11th UKACC
International Conference on Control.
Nash, J. F. et al. (1950). Equilibrium points in n-person ga-
mes. Proceedings of the national academy of sciences,
36(1):48–49.
Palfrey, T. R. (1990). Implementation in Bayesian equili-
brium: the multiple equilibrium problem in mecha-
nism design.
Papadimitriou, C. H. and Roughgarden, T. (2005). Com-
puting equilibria in multi-player games. In Procee-
dings of the sixteenth annual ACM-SIAM symposium
on Discrete algorithms, pages 82–91. Society for In-
dustrial and Applied Mathematics.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
438

Rich, E. and Knight, K. (1991). Artificial intelligence.
McGraw-Hill, New.
Soto-Alvarez, M. and Honkamaa, P. (2014). Multi-
ple hypotheses data association propagation for ro-
bust monocular-based SLAM algorithms. In Acou-
stics, Speech and Signal Processing (ICASSP), 2014
IEEE International Conference on, pages 6543–6547.
IEEE.
Thrun, S., Burgard, W., and Fox, D. (2005). Probabilistic
robotics. MIT press.
Velupillai, K. V. (2009). Uncomputability and undecida-
bility in economic theory. Applied Mathematics and
Computation, 215(4):1404–1416.
When Should the Chicken Cross the Road?
439
