
Precise Vehicle Positioning for Indoor Navigation via OpenXC
Yusuf Turk, Baturay Ozcan and Sezer Gören
Department of Computer Engineering, Yeditepe University, Kayışdağı, 34755, Istanbul, Turkey
Keywords: OpenXC, Indoor Positioning, Connected Car, Indoor LBS, Intelligent Parking Systems.
Abstract: We propose a method for vehicle positioning for indoor locations like parking garages. Our method does not
require other external positioning systems such as GPS. Instead, we determine the vehicle position from the
vehicle data obtained from an OpenXC dongle attached to the OBD-II interface of the vehicle. An
accompanying smartphone application which connects with the dongle via Bluetooth is developed. This
application calculates the position of the car and applies the algorithms proposed in this paper to the vehicle
data received from the interface. The route of the vehicle is then constructed and displayed on the smartphone
screen. As a future work, an assistant application will be developed that guides the driver to the spot where
the car was parked before.
1 INTRODUCTION
Finding parking spaces and locating the parked
vehicles in huge parking lots with multiple levels
such as large shopping malls, airports, and office
buildings is a common problem. Although traditional
solutions such as coloring and numbering the areas
worked until now, drivers still have to locate the car
without any assistance. Also, assisting the driver with
a single route to the location of the parked car is a
more time efficient solution.
Navigation systems in vehicles are becoming a
part of our daily life. Whether it is offered as an
embedded system included by the car manufacturer
or an external system using a smartphone, navigation
systems are more accessible than ever. Most of the
navigation systems use GPS which relies on
positioning values retrieved from various satellites.
This paper focuses on offering a route assistance
solution for the cases where GPS is not available such
as an indoor parking garage multiple levels below the
ground. Our solution is based on OpenXC platform
(OpenXC Platform, 2011). OpenXC vehicle interface
is composed of a microcontroller with two external
connections – one to the CAN bus via the OBD-II
port, and one to the host device via USB or Bluetooth.
It passively listens for a subset of CAN messages,
performs required unit conversion or factoring and
outputs a generic version to the USB interface. Many
vehicle output parameters such as vehicle speed,
steering wheel angle, door status, wind shield status,
etc. are available and sent through Bluetooth and
received by a custom smartphone application
developed on iOS or Android operating system.
OpenXC API enables the development of custom
applications using the information retrieved from the
vehicle. The adapter and the smartphone
communicate through Bluetooth. In this paper, we
developed a smartphone application which uses the
real-time values retrieved from OpenXC interface in
order to draw and save the route of the vehicle on the
indoor map of the parking garage and offers precise
vehicle positioning for indoor navigation. In the
future, our smartphone application can be updated to
guide the driver to the already parked car using the
saved route.
2 RELATED WORK
OpenXC is commonly used in vehicle systems along
with complementing tools and software. Android
application developed using OpenXC API can
retrieve real-time values from the vehicle to compare
them with threshold values (Suresh and Nirmalrani,
2014). Similarly, vehicle condition and sensor values
can be integrated with a network such as WiMAX in
order to create a networked Vehicle Sensing and
Control (VSC) system (Wang et al., 2016). Aside
from using OpenXC, vehicle data can also be
obtained by using in-vehicle eDSMS along with an
Android application (Akiyama et al., 2015).
440
Turk, Y., Ozcan, B. and Gören, S.
Precise Vehicle Positioning for Indoor Navigation via OpenXC.
DOI: 10.5220/0006770104400445
In Proceedings of the 4th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2018), pages 440-445
ISBN: 978-989-758-293-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Regarding the indoor parking problem, many
solutions have been proposed before. While some of
them uses built-in car sensors, others use external
devices to determine the position of the vehicle.
Wagner et al. (2010) proposes a method using Dead
Reckoning (DR) and commercially available maps
from companies or from building plans. The method
utilizes a topological map matching algorithm that
combines geometrical information and the topology
of the road network. Bojja et al. (2013) takes
advantage of low cost gyroscope and odometer
sensor. Sensor data is combined with the 3D map of
the building to obtain the indoor position. Razak et al.
(2015) tried to navigate the driver to an appropriate
parking position using QR codes placed in the
parking space. Android application reads the QR code
and navigates the driver to a parking spot using the
map stored in the database. Vehicle movement is
calculated using a step counter. Kumar et al. (2016)
mounted cameras throughout an indoor parking lot to
identify vehicle movement. The data was used to
calculate vehicle position by using convolutional
neural network with Deep Learning.
Indoor positioning and parking services also use
smartphone sensors to determine the position of the
vehicle. Some studies combined smartphone sensor
data with RSSI data of WLAN and the Bluetooth
signal data. Liu et al. (2012) proposed a cost and
energy efficient solution. Wireless Local Area
Network (WLAN) signals and the built-in
smartphone sensor data combined to find the precise
location of the vehicle inside an indoor parking space.
In addition to that, another study by Liu et al. (2012)
also used WLAN signals and smartphone sensors. An
indoor positioning engine is developed for the
positioning. Motion information is measured using
smartphone sensors. The solution can be used for
real-time navigation and location tracking. Similarly,
Bluetooth signals strengths can also be used for
location fingerprinting which is combined with
relative positioning in a study by Wilfinger et al.
(2016). Bluetooth Low Energy (BLE) is offered as a
cost-effective solution. Khare et al. (2017) stated that
the BLE and IEEE 802.15.4a compliant Ultra-
wideband (UWB) sensor data can be processed in
real-time to develop an indoor localization system.
Unfortunately, UWB sensors are not in current
handheld devices yet.
Research by Li et al. (2016) is focused on car
searching system that will help users to find their cars
in a large parking lot. QR codes are distributed over
the parking lot and a smartphone application
calculates the path to the vehicle using the shortest
path algorithm.
Internet of Things (IoT) based applications and
middleware systems are also used for parking
solutions for both current use cases and smart cities.
Ji et al. (2014) stated that car parking services must
be intelligent for IoT based smart cities. They
proposed a cloud based system offering users a car
parking service experience. In an another IoT
application by Bagula et al. (2015), RFID readers are
distributed in a parking lot to help billing and provide
smart parking. Similarly, Caballero-Gil et al. (2016)
used Near Field Communication (NFC) tags for their
indoor positioning system.
iBeacon is another technology which offers a low
energy solution compared to GPS and WLAN. Zou et
al. (2016) used iBeacons to provide positioning and
navigation for vehicles using both indoor and outdoor
spaces.
Indoor location positioning and navigation is also
used for autonomous car parking systems. A study by
Correa et al. (2017) proposes a cooperative vehicular
positioning network using the Vehicular Sensor
Networks (VSN).
3 PROPOSED METHOD
OpenXC supports various number of measurements
of a car such as engine speed, steering wheel angle,
fuel consumption, accelerator pedal position, ignition
status, etc. The data retrieved using the OpenXC API
as JSON formatted messages in a class called Vehicle
Messages. In our design, we make use of three of the
measurement data received through OpenXC vehicle
interface: i. steering wheel angle, ii. odometer, and iii.
ignition status. Steering wheel angle provides the
information about the angle of the steering wheel in
degrees in a range from -600 to +600. When the
steering wheel is turned to the right, positive values
are read in the message and negative when to left.
Odometer gives the data of the distance that the
vehicle travels as a unit of kilometer between the
values 0 to 16777214 with about 0.2-meter resolution.
Ignition status returns as a Boolean value indicating
one of the 4 states of the ignition: off, accessory, run,
and start.
In our implementation, we have three functions: i.
CheckTurn (Figure 1), ii. UpdateTurn (Figure 2), iii.
UpdateDirection (Figure 3). CheckTurn function
checks whether the car has turned or not. If so, the
route is updated. At the beginning, we consider the
ignition status of the vehicle. If it is off and the car is
in the parking area, we know that the driver has
parked his/her car in a parking spot. Therefore, we
update the route and return.
Precise Vehicle Positioning for Indoor Navigation via OpenXC
441
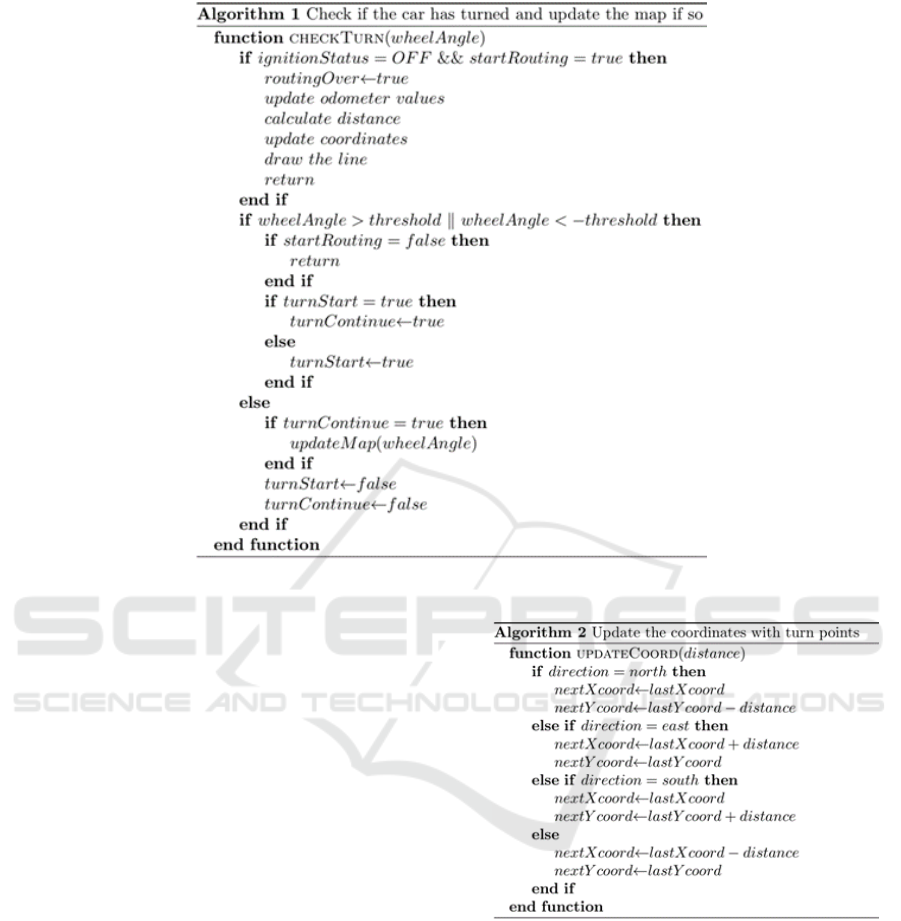
Figure 1: Algorithm for CheckTurn Function.
In order to detect a turn, we set a threshold value
for the steering wheel angle. If the current angle of
the steering wheel exceeds the threshold we assume
turn is started or continues when it has already started.
Exceeding the threshold means that the angle can be
over the positive threshold or below the negative
threshold. When this is the case, we check the
startRouting value which indicates if the car has
entered the parking area or not. If false, just return.
Otherwise, if the vehicle has already started to turn,
we set turnContinue value as true. If not, that means
rotation is just started, then we set turnStart value as
true. If the threshold value is not exceeded but the car
was in turning state, we predict that the rotation is
over and update the map. To do this, we need the
other two functions: updating the coordinates with
turn points and updating the direction after the turn.
The threshold value can be adjusted to detect the
different types of curves. For example, a U-turn is
detected when there are multiple and complete
steering wheel rotations.
UpdateCoord (Figure 2) is a function which we
save the coordinates of the turning points. It takes the
parameter distance (value in the unit of meters
showing the distance between the previous turn point
and the current one) and updates x and y coordinates
of the current turn point. For example, if the direction
Figure 2: Algorithm for UpdateCoord Function.
of the vehicle was north before the rotation, x
coordinate does not change but y coordinate is
decreased.
In UpdateDirection function (Figure 3), we set the
direction of the vehicle after the turn which is a
critical issue. Our solution runs in a way that we
check two values together: steering wheel angle and
the direction of the vehicle before the turn. First, we
find to which direction the vehicle is rotated. If the
value of the angle is positive, we predict that it is
rotated to the right. Otherwise, to the left. Then, we
take the previous direction of the vehicle under
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
442
consideration. For example, if the car is rotated to the
left and the previous direction is east, it is clear that
the driver was going to the east and then he/she turned
to the left, so the new direction of the car is now north.
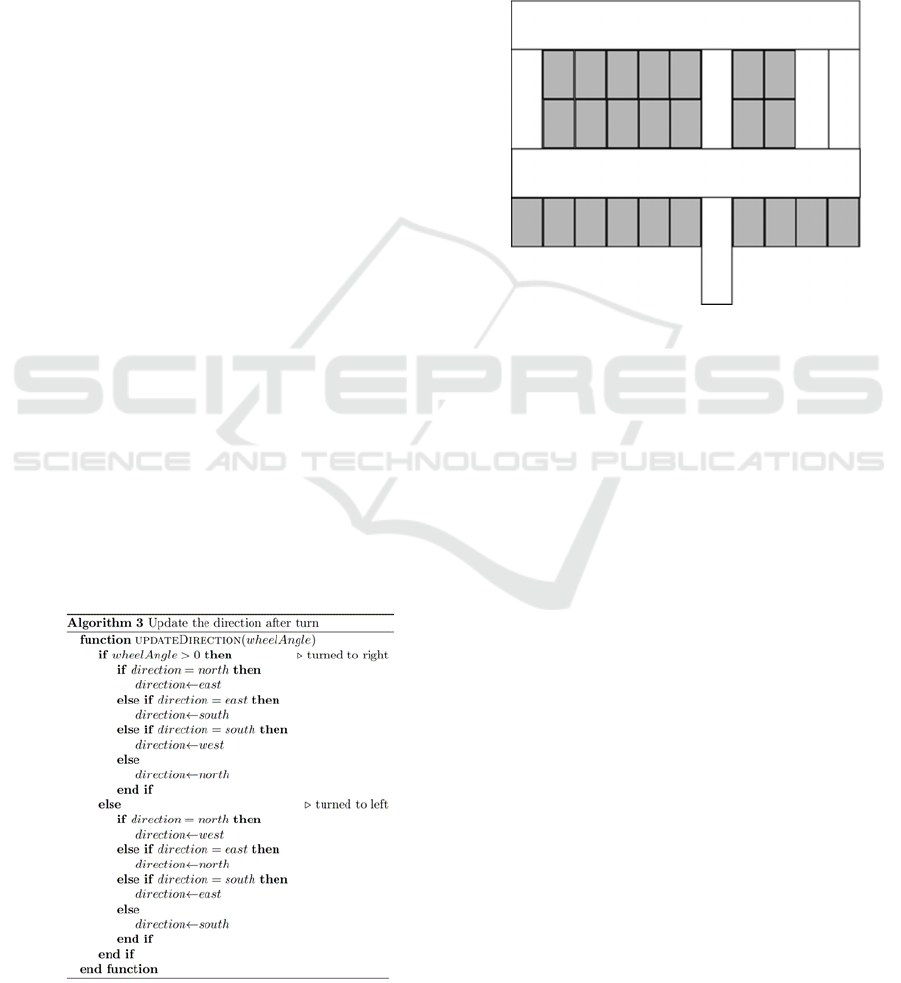
4 EVALUATIONS
We evaluated the system using an OpenXC adapter
attached to a car that supports the adapter and a
smartphone with Android operating system. The car
was driven to a small parking garage with the parking
plan given in Figure 4. In the figure, the color white
represents the roads and the grey rectangles represent
the parking spaces. The entrance of the parking lot is
the road at the southern part of the map. The map is
drawn proportionally.
The car was driven inside the indoor parking lot
until an empty parking spot is found. The OpenXC
adapter used in tests does not support GPS and all the
location services including the GPS was disabled on
the smartphone. The smartphone application was run
when the car entered the parking lot. Although a static
map is used in our system, it can be replaced according
to the last known location retrieved by the smartphone.
Figure 5 shows the car movements captured by the
application in real time. A new route is drawn on top
of the map whenever a new turn is detected. Route is
smoothened by the application in order to create an
easy to understand style for the map. Parking sign at
the bottom indicates the entrance of the indoor
parking lot. The car icon indicates the location of the
car and it is updated in real time. When the car is
parked, the car icon is moved inside the correct
parking spot. Smoothing the route created according
to the data from the OpenXC allowed the application
Figure 3: Algorithm for UpdateDirection Function.
to draw straight lines from corner to corner. Since the
most parking spaces in office buildings, shopping
malls, and airports consists of proportionally
designed rectangular parking spots, it will be
sufficient for most of the use cases. While we were
doing the tests, we always observed that the vehicle
and parking lot sizes are detected with an error of less
than a half meter. In addition, we also observed that
the route was successfully drawn without crossing the
area of the parking space.
Figure 4: Blueprint of the car park.
The steering wheel angle range from -600 to 600
where positive values indicate that wheel is turning to
the right and negative values indicate that the wheel
is turning to the left. If the driver turns left, it does not
necessarily mean that the steering wheel angle values
will always be negative. This is because the steering
action can consist of steering to the right for a certain
angle, followed by a large angle steering to the left.
Among all the in-car tests, our algorithm calculated
the steering angles and turn direction correctly. The
application saves the location of the parking spot
when the ignition is switched off.
5 CONCLUSIONS
In this paper, we proposed a vehicle positioning
method for the indoor navigation without the help of
external positioning systems, but with OpenXC
vehicle data. The indoor route of the vehicle is built
and saved by our smartphone application. As a future
work, driver assistance to the last parked location of
the vehicle will be added as a new feature to our
application. In addition, detection of the story level in
multi-story parking garages is another future work.
We expect that smart parking solutions and assistants
like our approach will be more common in the
following years.
Precise Vehicle Positioning for Indoor Navigation via OpenXC
443

Figure 5: Car Movements in Real Time.
REFERENCES
Openxcplatform.com, 2011. OpenXC Platform. [online]
Available at: www.openxcplatform.com/ [Accessed 3
November 2017].
V. Suresh and V. Nirmalrani. (2014). "Android based
vehicle diagnostics and early fault estimation system".
In: International Conference on Computation of Power,
Energy, Information and Communication (ICCPEIC).
Chennai, 2014, pp. 417-421.
Y. Wang et al. (2016). "VLnsight: enabling open
innovation in networked vehicle sensing and control".
In IEEE Network, vol. 30, no. 4, pp. 34-44, July-August
2016.
S. Akiyama, Y. Nakamoto, A. Yamaguchi, K. Sato and H.
Takada. (2015). “Vehicle Embedded Data Stream
Processing Platform for Android Devices”. In:
International Journal of Advanced Computer Science
and Applications (IJACSA), 6(2).
J. Wagner, C. Isert, A. Purschwitz and A. Kistner. (2010)
"Improved vehicle positioning for indoor navigation in
parking garages through commercially available maps".
In: 2010 International Conference on Indoor
Positioning and Indoor Navigation, Zurich, pp. 1-8.
J. Bojja, M. Kirkko-Jaakkola, J. Collin and J. Takala.
(2013). "Indoor 3D navigation and positioning of
vehicles in multi-story parking garages". In: 2013 IEEE
International Conference on Acoustics, Speech and
Signal Processing, Vancouver, BC, 2013, pp. 2548-
2552.
S. F. A. Razak, C. L. Liew, C. P. Lee and K. M. Lim.
(2015). "Interactive android-based indoor parking lot
vehicle locator using QR-code". In: 2015 IEEE Student
Conference on Research and Development (SCOReD),
Kuala Lumpur, 2015, pp. 261-265.
A. K. T. R. Kumar, B. Schäufele, D. Becker, O. Sawade and
I. Radusch. (2016). "Indoor localization of vehicles
using Deep Learning". In: 2016 IEEE 17th
International Symposium on A World of Wireless,
Mobile and Multimedia Networks (WoWMoM),
Coimbra, 2016, pp. 1-6.
J. Liu, R. Chen, Y. Chen, L. Pei, L. Chen (2012). “iParking:
An Intelligent Indoor Location-Based Smartphone
Parking Service”. In: Sensors 2012, 12, 14612-14629.
J. Liu, R. Chen, L. Pei, R. Guinness, H.A. Kuusniemi,
(2012). “Hybrid Smartphone Indoor Positioning
Solution for Mobile LBS”. In: Sensors 2012, 12, 17208-
17233.
R. Wilfinger, T. Moder, M. Wieser and B. Grosswindhager.
(2016). "Indoor position determination using location
fingerprinting and vehicle sensor data". In: 2016
European Navigation Conference (ENC), Helsinki,
2016, pp. 1-9.
S. P. Khare, J. Sallai, A. Dubey and A. Gokhale. (2017).
"Short Paper: Towards Low-Cost Indoor Localization
Using Edge Computing Resources" 2017 IEEE 20th
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
444

International Symposium on Real-Time Distributed
Computing (ISORC), Toronto, ON, 2017, pp. 28-31.
J. Li, Y. An, R. Fei and H. Wang. (2016). "Smartphone
based car-searching system for large parking lot" 2016
IEEE 11th Conference on Industrial Electronics and
Applications (ICIEA), Hefei, 2016, pp. 1994-1998.
Z. Ji, I. Ganchev, M. O'Droma, L. Zhao, X.A. Zhang.
(2014). “Cloud-Based Car Parking Middleware for
IoT-Based Smart Cities: Design and Implementation”.
Sensors 2014, 14, 22372-22393.
A. Bagula, A, L. Castelli, M. Zennaro. (2015). “On the
Design of Smart Parking Networks in the Smart Cities:
An Optimal Sensor Placement Model”. Sensors 2015,
15, 15443-15467.
C. Caballero-Gil, P. Caballero-Gil, J. Molina-Gil. (2016).
“Cellular Automata-Based Application for Driver
Assistance in Indoor Parking Areas”. Sensors 2016, 16,
1921.
H. Zou, H. Jiang, Y. Luo, J. Zhu, X. Lu, L. Xie,.
(2016). “BlueDetect: An iBeacon-Enabled Scheme
for Accurate and Energy-Efficient Indoor-Outdoor
Detection and Seamless Location-Based Service”.
Sensors 2016, 16, 268.
A. Correa, G. Boquet, A. Morell, J. Lopez Vicario. (2017).
“Autonomous Car Parking System through a
Cooperative Vehicular Positioning Network”. Sensors
2017, 17, 848.
Precise Vehicle Positioning for Indoor Navigation via OpenXC
445
