
Verification of Feature Coordination using the Fluent Calculus
Ralph Hoch and Hermann Kaindl
Institute of Computer Technology, TU Wien, Austria
Keywords:
Verification, Fluent Calculus, Situation Calculus, Model Checking.
Abstract:
Previously, an approach based on the Situation Calculus was published for specifying feature coordination
of a software system, but without a physical model or any additional autonomous agent in the environment.
Hence, no verification of the feature coordination was possible in spite of its formal specification. Verification
of safety-critical feature coordination is important, however, and requires additional models. This paper shows
that a specification of a software coordinator can be formally verified using the Fluent Calculus (a derivative
of the Situation Calculus), when combined with additional models. The overall qualitative model is a re-
implementation of a recently published one based on synchronized finite-state machines, which was used for
model checking. In fact, we show how the model in Fluent Calculus can be systematically derived from the
finite-state machines. The results of verification using the Fluent Calculus correspond to those using model
checking. We also contrast our approach using the Fluent Calculus with model checking. In summary, we
present verification of (safety-critical) feature coordination using the Fluent Calculus.
1 INTRODUCTION
Feature interaction occurs, when the interplay of two
or more features gives rise to an overall system be-
havior that is not easily deducible from the individual
behaviors of the features involved, and often unex-
pected (Apel et al., 2013). Undesired feature inter-
action can be safety-critical, e.g., in automotive sys-
tems. Hence, the verification of such cyber-physical
systems including (embedded) software is important.
An approach for detecting feature interactions au-
tomatically through model checking can be found in
(Juarez-Dominguez et al., 2008). A feature inter-
action may result directly from conflicting requests
to a single variable in the software (as studied for
the speed of a vehicle in (Juarez-Dominguez et al.,
2008)). This is sufficient for detecting that there is a
feature interaction, but not for investigating its influ-
ence on the environment. This would require an addi-
tional physical model and a model of another vehicle,
which is an independent autonomous agent.
Bocovich and Atlee (Bocovich and Atlee, 2014)
also addressed feature interaction resulting from a
conflict of features accessing the same software vari-
able(s) at the same point in time. Since the granu-
larity of features may be relevant, resolution for each
software variable under conflict was proposed for fea-
ture coordination (with examples in the automotive
domain). They showed how such a resolution can
be specified using the Situation Calculus. However,
without a physical model or any additional embod-
ied entity in the environment, no verification is pos-
sible of whether such a resolution as specified for the
software actually achieves its purpose in the overall
cyber-physical system.
According to (Rathmair et al., 2016), an additional
physical model is needed for model checking feature
coordination. This work modeled the influence of
speed also on the distance to another vehicle in the
context of Adaptive Cruise Control (ACC), which is
one of the more advanced features penetrating the au-
tomotive market (Winner and Schopper, 2015). It in-
cludes both Cruise Control (CC), as widely used in
cars, and Distance Control (DC) of a vehicle A fol-
lowing another vehicle B. Overall, this work modeled
a cyber-physical system qualitatively and used the re-
sulting model for model checking the coordination of
features.
Artificial Intelligence techniques like the Situation
Calculus may be a good fit for modeling such a sys-
tem qualitatively, since they have been proposed and
used early on in the context of robot planning. Hence,
they offer also planning capabilities, so that not only
the specification of a feature coordinator is possible,
but also some means for verifying whether it actually
works should be feasible. In this sense, our motiva-
tion was to check this feasibility using the ACC ex-
ample.
Hoch, R. and Kaindl, H.
Verification of Feature Coordination using the Fluent Calculus.
DOI: 10.5220/0006771401690179
In Proceedings of the 13th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2018), pages 169-179
ISBN: 978-989-758-300-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
169

We systematically transfer the model of (Rathmair
et al., 2016) to the Fluent Calculus, a derivative of the
Situation Calculus as used in (Bocovich and Atlee,
2014) for specifying feature coordination within soft-
ware, and use the resulting model for a new approach
to the verification of cyber-physical feature coordi-
nation. This approach involves a tool supporting the
Fluent Calculus and a simple planner that we imple-
mented on top of it. When the planner can find a se-
quence of actions for achieving a goal that formulates
a property to be avoided, then it actually presents an
example of what is to be avoided. This corresponds to
a counterexample in model checking. Hence, we also
contrast our new verification approach based on the
Fluent Calculus with the widely studied verification
approach based on model checking.
The remainder of this paper is organized in the fol-
lowing manner. First, we provide some background
material for making this paper self-contained, and re-
late it to other work. Then we present a system-
atic transformation from synchronized finite-state ma-
chines (FSMs) to a representation in the Fluent Calcu-
lus. Based on it, we explain our verification approach
and show that it can deliver the same results as model
checking. Finally, we briefly contrast it with model
checking.
2 BACKGROUND AND RELATED
WORK
We cover here some background on and related work
to the Fluent Calculus, feature coordination, model
checking, and the given model of ACC that we trans-
form to the Fluent Calculus for verification with our
new approach.
2.1 Fluent Calculus
The original idea was introduced by McCarthy and
Hayes (McCarthy and Hayes, 1969) long time ago.
Their Situation Calculus consists of three elements:
1. Situations
represent the evolving states of the domain, where
certain conditions hold in each state.
2. Actions
represent the changes between situations. A spe-
cial predicate poss determines whether a specific
action can be performed or not.
3. Fluents
represent the elements of the domain that can
change over time. Typically, predicates are used
for this representation, which take a situation as an
argument. An example is the fluent carrying(o,s),
which states if an object o is carried, e.g., by a
robot, in situation s.
Based on previous work on the Situation Calculus
such as (Reiter, 1991), Thielscher (Thielscher, 1998)
developed the Fluent Calculus. It differs from the Sit-
uation Calculus in how situations are treated and how
fluents are used. The Fluent Calculus defines that a
new state after the execution of an action is equal to
the previous state with exceptions to the effects of the
action. In addition, fluents are treated as functional
terms. The fluents from the Situation Calculus are
stripped off the situation parameter, and special pred-
icates, e.g., holds, are introduced. These special pred-
icates take a functional term and a state as an argu-
ment. They are used to check whether specific con-
ditions hold in a specific state or not. For example,
the fluent carrying(o,s) from the Situation Calculus
translates to a functional term carrying(o) in the Flu-
ent Calculus. Hence, this term is not depended on the
current state anymore. To check whether this term
holds in a specific state, the holds predicate is used,
e.g., holds(carrying(o), state).
Hence, the Fluent Calculus provides a formalism
to model specific actions that lead from one situa-
tion to another. This is specified using the poss and
state update predicates. These predefined predicates
model the preconditions (poss statement) and effects
(state update) of an action. Together, they provide a
formal specification of an action.
An implementation of the Fluent Calculus called
FLUX (Thielscher, 2005) is available for the con-
straint logic programming system ECLiPSe.
1
To il-
lustrate how such an action in Fluent Calculus is ap-
plied in FLUX, we use a simple example. Let us
assume that a vehicle B is currently driving with
medium speed and wants to change to high speed.
This simplistic example already utilizes the main
parts of the Fluent Calculus. The driving speed of
the vehicle changes over time and thus is a fluent.
The change of the driving speed is performed by an
action. For this example, we assume that the name
of this action is switchMediumSpeedToHighSpeedVe-
hicleB. What is missing, is the situation of the do-
main. The current situation of vehicle B is medium
speed. This information is only part of a more com-
plex situation specification, but is sufficient for this
example. In essence, the action switchMediumSpeed-
ToHighSpeedVehicleB can only be executed if the cur-
rent speed of vehicle B is medium speed. This is
a precondition for the execution of the action. The
1
ECLiPSe Constraint Programming System:
http://www.eclipseclp.org
ENASE 2018 - 13th International Conference on Evaluation of Novel Approaches to Software Engineering
170

holds predicate checks if a specific value vehicleBIs-
SetTo(B, mediumSpeed) holds in state Z. Listing 1
shows this precondition in FLUX.
p o s s ( swi t c hMedi u m Speed T o HighS p e edVeh i c leB (B ) , Z)
:−
% I n p u t ha s t o be of t y p e V e h i c l e B %
knows_val ( [ B ] , v e h i c l e B ( B) , Z) ,
% P r e c o n d i t i o n t h a t t h e s p e e d o f B i s s e t t o
mediumSpeed i n S t a t e Z %
h o l d s ( v e h i c l e B I s S e t T o ( B , mediumSpeed ) , Z) .
Listing 1: Preconditions of the medium-to-high-speed
action in FLUX.
When the action is executed, it has effects on the sit-
uation of the domain, e.g., the speed of vehicle B
changes. In our example, vehicle B is set to high
speed. However, this is not sufficient, since we also
have to specify that vehicle B is not driving with
medium speed anymore. This fact is removed from
the state. Listing 2 shows the effects of the action
in FLUX. Basically vehicleBIsSetTo(B, highSpeed)
is added and vehicleBIsSetTo(B, mediumSpeed) re-
moved from Z1 and results in Z2.
s t a t e _ u p d a t e ( Z1 ,
swi tch Med ium Spe edT oHi ghS pee dB (B ) , Z2 , [ ] ) :−
upd ate ( Z1 , % o r i g i n a l s t a t e %
% S t a t e m e n t s a dded t o t h e S t a t e %
[ v e h i c l e B I s S e t T o ( B , h i g h Spee d ) ] ,
% S t a t e m e n t s removed f rom t h e S t a t e %
[ v e h i c l e B I s S e t T o ( B , mediumSpeed ) ] ,
Z2 % new S t a t e i s s t o r e d i n Z2 %
) .
Listing 2: Effects of the medium-to high-speed-action in
FLUX.
In fact, we previously proposed a verification ap-
proach based on the Fluent Calculus already in (Hoch
et al., 2015), which verifies sequences of semanti-
cally specified services against the specifications of
its atomic services. In this paper, we propose a com-
pletely different verification approach, where all pos-
sible sequences are exhaustively tried out by a planner
and checked against a goal condition that is actually
to be avoided.
2.2 Related Work on Feature
Coordination
Automatically detecting and analyzing feature inter-
actions is outside the scope of this paper, which fo-
cuses on coordinating features with known interac-
tions. Even if these are known, coordinating the fea-
tures involved poses additional challenges (Jackson
and Zave, 1998).
The formulation of resolutions as proposed in
(Bocovich and Atlee, 2014) uses the Situation Calcu-
lus implemented in GOLOG (Levesque et al., 1997).
This work did not investigate, however, the physical
effects from a feature interaction of a software vari-
able, and it did not include independent physical vari-
ables outside the control of the software. Hence, no
verification was possible of whether such a resolution
as specified actually achieves its purpose.
In fact, we can also use this approach for speci-
fying a coordination of CC and DC as given in For-
mula 1.
Poss(setSpeedA(SPEED), Z) ≡
∃ValueCC.ccVehicleAIsSetTo(cc, ValueCC)∧
∃ValueDC.dcVehicleAIsSetTo(dc, ValueDC)∧
minimum(ValueCC, ValueDC, SPEED). (1)
The actual implementation in FLUX differs
slightly from this equation as we utilize several Poss
statements to express the minimum. Each Poss state-
ment has a set of non-overlapping conditions and the
minimum is built by choosing the fitting Poss state-
ment. Since we use a qualitative model we chose this
approach.
GOLOG differs from FLUX in the way it handles
variable resolution. GOLOG uses (backward) regres-
sion as opposed to the forward progression of FLUX.
More information on this and how GOLOG programs
can be interpreted in FLUX is given in (Schiffel and
Thielscher, 2005).
2.3 Background on Model Checking
Model checking (or property checking) is a for-
mal verification technique based on models of sys-
tem behavior and properties, specified unambigu-
ously in formal languages (see, e.g., (Baier and Ka-
toen, 2008)). The behavioral model of the system un-
der verification is often specified using an FSM, in our
case using synchronized FSMs. Their expressiveness
is sufficient for our case, but Petri nets, e.g., could be
used as well, if needed (depending on the tool used).
The properties to be checked on the behavioral model
are formulated in a specific property specification lan-
guage, usually based on a temporal language. Several
tools such as NuSMV (NuSMV, 2014) exist for per-
forming these checks by systematically exploring the
state-space of the system. When such a tool finds a
property violation, it reports it in the form of a coun-
terexample.
Many model checking approaches use Computa-
tional Tree Logic (CTL) for property specification,
with the following CTL operators:
Verification of Feature Coordination using the Fluent Calculus
171
• AG (Always Globally): an expression p is true in
the initial state s
0
and in each state of all transi-
tions s
0
→ s
1
→ s
2
→ ··· → s
n
.
• EF (Eventually in the Future): for an expression p
and an initial state s
0
, there exists a state sequence
s
0
→ s
1
→ s
2
→ ··· → s
n
such that p is true in s
n
.
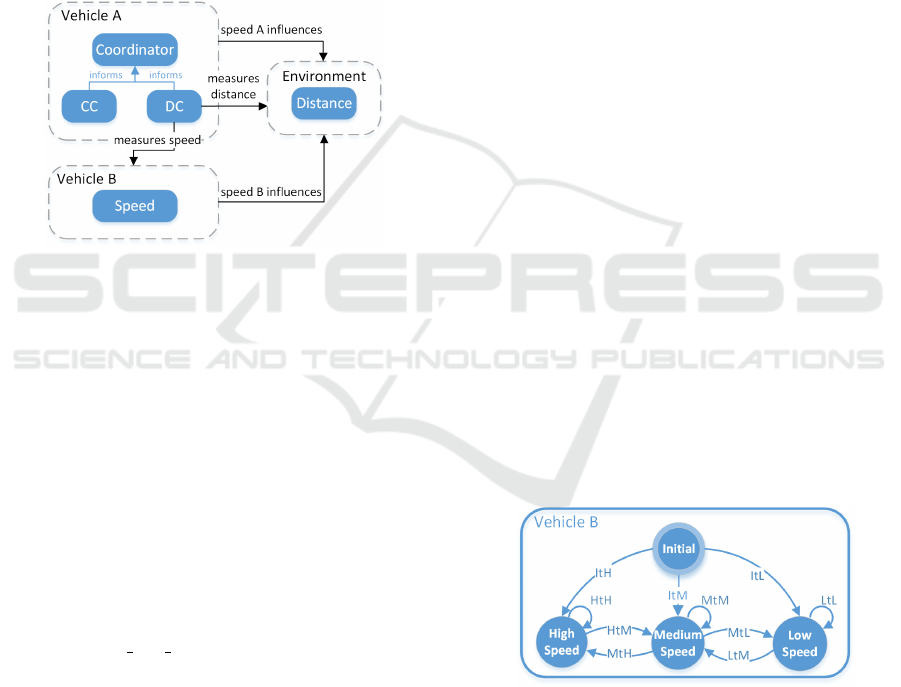
2.4 A Given Minimalist Model of ACC
Our example, as adopted from (Rathmair et al., 2016),
is based on Adaptive Cruise Control (ACC). The
high-level structure of this model is illustrated in Fig-
ure 1.
Figure 1: High-level structure of ACC model used.
It contains a model of vehicle A, which involves
a Coordinator of CC and DC. It also contains vehicle
B, whose behavior is, of course, not under control of
vehicle A. And it contains a simple physical model
of the environment, where the distance between vehi-
cles A and B is important with respect to a potential
accident.
The property that such a model has been checked
against in (Rathmair et al., 2016) formalizes such an
accident, more precisely a rear-end collision accident
that DC has to avoid, and hence also ACC. Formula 2
defines this property in CTL in the sense that it is al-
ways (globally) true that the physical distance is dif-
ferent from a collision:
AG(state phy dist 6= COLLISION) (2)
3 MODELING CYBER-PHYSICAL
FEATURE COORDINATION IN
THE FLUENT CALCULUS
Rather than creating a new model from scratch, we
built upon the qualitative model of ACC as defined
in (Rathmair et al., 2016). In contrast to the original
model, we used the Fluent Calculus for modeling the
cyber-physical system including the feature coordina-
tion. Hence, we transform the given model in syn-
chronous FSMs to a model represented in the Fluent
Calculus, where both models are supposed to capture
the same overall behavior of ACC. In fact, we spec-
ify a systematic transformation approach that could,
in principle, also be automated.
Instead of replicating exactly the same FSMs from
(Rathmair et al., 2016) here, we present isomorphic
FSMs below, which have already action names as la-
bels, i.e. names of the actions to be formally defined
in the Fluent Calculus. This is primarily for didactic
reasons, so that it will be easier to see the correspon-
dence of the FSMs with the actions as defined in the
Fluent Calculus.
First, we have to specify how the following terms
in the Fluent Calculus are derived:
• terms identifying the state machines,
• terms for each state in each state machine,
• terms for each state transition.
Based on these terms, we define the preconditions and
effects of all actions as derived from the conditions of
state transitions, the state from where a transition is
going out (its root), and the state where the transition
leads to (its target).
Before we actually explain the details of the
derivation of these terms, let us show the FSM on the
behavior of vehicle B as an example. This FSM, as
given in Figure 2, is isomorphic to the FSM labeled
Vehicle B in (Rathmair et al., 2016, Figure 6). The
action names on transitions are abbreviated in Fig-
ure 2. They are automatically inferred from the orig-
inal model according to the rules defined in the text.
For example MtL translates to switchMediumSpeed-
ToLowSpeedVehicleB.
Figure 2: FSM of vehicle B.
The systematic transformation approach to this
derivation is as follows:
• Each FSM is a term {FSM.name}{FSM.context}
with an argument. The argument {FSM.name} is
a constant used during the verification process to
ensure that actions are only performed when ap-
propriate. The suffix {FSM.context} is not neces-
sary, but makes the term more human readable.
ENASE 2018 - 13th International Conference on Evaluation of Novel Approaches to Software Engineering
172
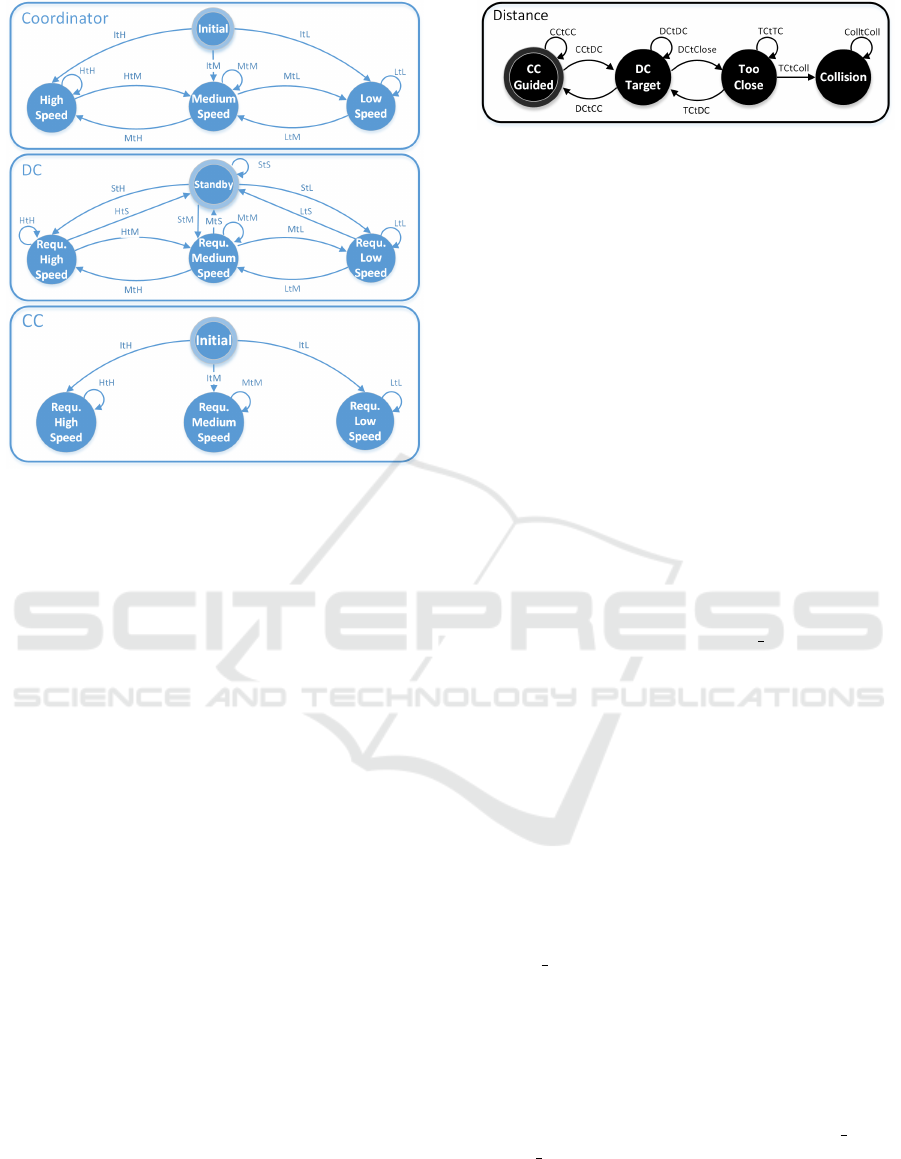
Figure 3: FSM of vehicle A.
Example: FSM of CC is ccVehicleA(cc).
FSM.context is VehicleA since CC is executed for
Vehicle A.
• Each FSM is also a compound term {FSM.name}
{FSM. context} IsSetTo(object, value) with two
arguments. This term may change over time and
thus is a fluent. The first argument is the object on
which the term operates and the second argument
is the value.
Example: FSM of CC results in ccVehicleAIs-
SetTo(object, value), where object and value are
to be reset for concrete values, e.g., ccVehicleAIs-
SetTo(cc, requLowSpeed).
• Each state of an FSM is a value that the term
of this FSM can hold. The value is repre-
sented as a constant and is the name of the state
{FSM.state.name}{FSM.name}.
Example: The state Requ Low Speed of the
CC FSM in Vehicle A results in the value re-
quLowSpeedCC. This value is used with the
corresponding term ccVehicleAIsSetTo of the
FSM. The result is ccVehicleAIsSetTo(cc, re-
quLowSpeedCC).
• Each transition in an FSM is transformed to an
action in the Fluent Calculus. The name of
the action is defined through the root and target
state of the transition and is switch {FSM. transi-
tion.root.name} To {FSM.transition.target.name}
{FSM. name}.
Example: The transition in the CC FSM from
Figure 4: FSM of the distance classification.
Requ Medium Speed to Requ Low Speed re-
sults in the action switchRequMediumSpeedToRe-
quLowSpeed.
Much as Figure 2 shows the action names for ve-
hicle B, Figure 3 shows the action names for vehicle
A and Figure 4 the distance classification in the envi-
ronment.
The FSM in Figure 2 contains the action
switchMediumSpeedToHighSpeedVehicleB as a label
of a transition. In fact, it corresponds to the example
of an action specified in the Fluent Calculus above (in
the Background section). Still, we have to explain
how the action specifications can be systematically
transformed from the FSMs (based on the terms de-
rived above).
The systematic transformation of transitions in
FSMs to actions in the Fluent Calculus is as follows:
• Transitions between states are transformed to ac-
tions. Actions consist of state update and poss
statements.
• Conditions of the actions are given as proposi-
tional logic formulas in disjunctive normal form.
• The arguments of an action are all distinct ele-
ments of the propositional logic formula.
• The root of the state transition in the FSM is a
precondition in the corresponding poss statement
of the action in the Fluent Calculus.
• For each disjunctive part of the condition of a tran-
sition, one poss statement is created.
• The effects of an action are modeled via a
state update predicate.
• The positive effect of an action is the target node.
• The negative effect of an action is the root node.
To demonstrate this systematic transformation,
let us consider the transition from low speed to
medium speed in the Coordinator FSM. It consists of
two separate or-connected conditions condCo M and
condCo H given as propositional formulas in (Rath-
mair et al., 2016). These conditions consist of several
logical expressions related to states in the FSMs. The
disjunctive normal form of this condition is shown in
Listing 3.
Verification of Feature Coordination using the Fluent Calculus
173

(
( requMediumSpeedCC ∧ ¬requLowSpeedDC ) ∨
( ¬requLowSpeedDC ∧ requMediumSpeedDC )
) ∨
(
(
requHighSpeedCC ∧
¬requLowSpeedDC ∧
¬requMediumSpeedDC
) ∨
(
¬requLowSpeedDC ∧
¬requMediumSpeedDC ∧
requH ighSp eedDC
)
)
Listing 3: Example condition on a transition.
Hence, there are or-connected blocks of and-
connected atoms. Each or-block, e.g., (requMedi-
umSpeedCC ∧ ¬requLowSpeedDC), is treated as
one set of preconditions for an action, in this case
the switchLowSpeedToMediumSpeedCoordinator ac-
tion. That is, the action can only be executed
if (at least) one set of preconditions is fulfilled.
E.g., the precondition set (requMediumSpeedCC ∧
¬requLowSpeedDC) states, that the corresponding
action can only be executed if the cruise control re-
quests medium speed and, at the same time, the dis-
tance control does not request low speed.
In the Coordinator FSM, the condition on
the transition states that the CC FSM has to
be in state requMediumSpeed and the DC FSM
cannot be in state requLowSpeed to trigger the
transition. In the Fluent Calculus, these states
are terms ({FSM.state.name}{FSM.name}) re-
lated to the terms of the FSM ({FSM.name}
{FSM.context}IsSetTo(object, value)) and, thus, we
can systematically derive a representation. For exam-
ple, the atomic element requMediumSpeedCC in the
condition is a value of ccVehicleAIsSetTo and only
holds if ccVehicleAIsSetTo(cc, requMediumSpeedCC)
is true. That is, this part of the condition only evalu-
ates to true if cruise control requests medium speed.
This is one part of the precondition set. The second
part is ¬requLowSpeedDC and is transformed to
dcVehicleAIsSetTo(DC, requLowSpeedDC). Together,
they are one precondition set for the corresponding
switchLowSpeedToMediumSpeedCoordinator action.
Preconditions are checked via the poss predicate
in the Fluent Calculus. In fact, there can be many
poss statements with different conditions for one ac-
tion. We utilize this and generate one poss statement
per precondition set. Each poss statement also con-
tains the root state of the transition in the FSM as an
additional precondition. Hence, the switch from low
speed to medium speed has the additional precondi-
tion that the coordinator has currently set the speed to
low speed. Corresponding poss statements in FLUX
for the first two or-connected sets in Listing 3 are
shown in Listing 4.
% requMediumSpeedCC and n o t requLowSpeedDC %
p o s s ( swit c h L owSpeed T o M ediumS p e e d Coordi n a t or (A ,
DC, CC) , Z ) :−
% o b j e c t t h a t t h e a c t i o n o p e r a t e s on %
knows_val ( [ A] , v e h i c l e A (A) , Z ) ,
% r o o t s t a t e i n FSM a s a p r e c o n d i t i o n %
h o l d s ( c o o r d i n a t o r V e h i l c e A I s S e t T o ( A, l owSpeed ) ,
Z ) ,
% requMediumSpeedCC p r e c o n d i t i o n %
h o l d s ( c c V e h i c l e A I s S e t T o ( CC, requMediumSpeedCC ) ,
Z ) ,
% n o t requLowSpeedDC p r e c o n d i t i o n %
knows_not ( d c V e h i c l e A I s S e t T o (DC,
requLowSpeedDC ) , Z ) .
% requMediumSpeedDC and n o t RequLowSpeedCC %
p o s s ( swit c h L owSpeed T o M ediumS p e e d Coordi n a t or (A ,
DC, CC) , Z ) :−
% o b j e c t t h a t t h e a c t i o n o p e r a t e s on %
knows_val ( [ A] , v e h i c l e A (A) , Z ) ,
% r o o t s t a t e i n FSM a s a p r e c o n d i t i o n %
h o l d s ( c o o r d i n a t o r V e h i l c e A I s S e t T o ( A, l owSpeed ) ,
Z ) ,
% requMediumSpeedDC p r e c o n d i t i o n %
h o l d s ( d c V e h i c l e A I s S e t T o (DC, requMediumSpeedDC ) ,
Z ) ,
% n o t requLowSpeedCC p r e c o n d i t i o n %
knows_not ( c c V e h i c l e A I s S e t T o (CC,
requLowSpeedCC ) , Z ) .
Listing 4: Example poss statements for actions.
The arguments of the action are given through the
elements it depends on. In Listing 4, the arguments
are A, DC and CC, or the vehicle, the distance con-
trol and the cruise control, respectively. It has to be
noted that this is not necessarily required, the argu-
ments could also be omitted, but we include them for
better readability.
Still missing are the effects of an action. The ef-
fects are the fluents that are added and removed when
an action is performed. In our example, the effect of
switching from low speed to medium speed is that the
vehicle is driving with medium speed after execution
of the action. Additionally, the fact that the vehicle
is driving low speed has to be removed. Hence, the
positive effect is the addition of the target state as a
value, and the negative effect is the removal of the
root state as a value. The effects are specified via the
state update predicate and shown in Listing 5.
ENASE 2018 - 13th International Conference on Evaluation of Novel Approaches to Software Engineering
174

s t a t e _ u p d a t e ( Z1 ,
switch L o w SpeedTo M e d iumSpe e d C oordina t o r (A, _ ,
_ ) , Z2 , [ ] ) :−
upd ate ( Z1 ,
% p o s i t i v e e f f e c t : a d d in g medium s p e e d %
[ c o o r d i n a t o r V e h i l c e A I s S e t T o (A, mediumSpeed ) ] ,
% n e g a t i v e e f f e c t : r e m o v i ng low s pe e d %
[ c o o r d i n a t o r V e h i l c e A I s S e t T o (A, l owS peed ) ] ,
Z2
) .
Listing 5: Example state update statement of an action.
Using the systematic transformation defined
above, a very verbose model results. Often, many
state transitions in the FSM have the same conditions
but different root states, or they have repeating condi-
tions on different state transitions. For example, the
condCo M condition shown above is used in a transi-
tion from low speed to medium speed, medium speed
to medium speed and high speed to medium speed.
With this in mind, the transformation can be op-
timized. All conditions that are repeated on differ-
ent state transitions leading to the same state can be
written as a single poss statement. In this case, the
root nodes are or-connected preconditions. Hence,
condCo M can also be written as shown in Listing 6.
Note, that also the name of the action has changed,
since it does not depend on the root state anymore.
% requMediumSpeedDC and n o t requLowSpeedDC %
p o s s ( sw i tchTo M ediu m Speed Vehic l eA (A , DC, CC) , Z ) :−
% o b j e c t t h a t t h e a c t i o n o p e r a t e s on %
knows_val ( [ A] , v e h i c l e A (A) , Z ) ,
(
% r o o t s t a t e low s p e e d a s a p r e c o n d i t i o n %
h o l d s ( c o o r d i n a t o r V e h i l c e A I s S e t T o ( A,
low Spee d ) , Z ) ;
% r o o t s t a t e medium sp e e d a s a p r e c o n d i t i o n %
h o l d s ( c o o r d i n a t o r V e h i l c e A I s S e t T o ( A,
mediumSpeed ) , Z ) ;
% r o o t s t a t e h i gh s p e e d a s a p r e c o n d i t i o n %
h o l d s ( c o o r d i n a t o r V e h i l c e A I s S e t T o ( A,
h i g h S p e e d ) , Z )
) ,
% requMediumSpeedCC p r e c o n d i t i o n %
h o l d s ( c c V e h i c l e A I s S e t T o ( CC, requMediumSpeedCC ) ,
Z ) ,
% n o t requLowSpeedDC p r e c o n d i t i o n %
knows_not ( d c V e h i c l e A I s S e t T o (DC,
requLowSpeedDC ) , Z ) .
% n o t requLowSpeedCC a nd requMediumSpeedDC %
p o s s ( sw i tchTo M ediu m Speed Vehic l eA (A , DC, CC) , Z ) :−
% o b j e c t t h a t t h e a c t i o n o p e r a t e s on %
knows_val ( [ A] , v e h i c l e A (A) , Z ) ,
(
% r o o t s t a t e low s p e e d a s a p r e c o n d i t i o n %
h o l d s ( c o o r d i n a t o r V e h i l c e A I s S e t T o ( A,
low Spee d ) , Z ) ;
% r o o t s t a t e medium sp e e d a s a p r e c o n d i t i o n %
h o l d s ( c o o r d i n a t o r V e h i l c e A I s S e t T o ( A,
mediumSpeed ) , Z ) ;
% r o o t s t a t e h i gh s p e e d a s a p r e c o n d i t i o n %
h o l d s ( c o o r d i n a t o r V e h i l c e A I s S e t T o ( A,
h i g h S p e e d ) , Z )
) ,
% requMediumSpeedDC p r e c o n d i t i o n %
h o l d s ( d c V e h i c l e A I s S e t T o (DC, requMediumSpeedDC ) ,
Z ) ,
% n o t requLowSpeedCC p r e c o n d i t i o n %
knows_not ( c c V e h i c l e A I s S e t T o (CC,
requLowSpeedCC ) , Z ) .
Listing 6: Example optimized poss statements for actions.
The effects of this action have to be adapted as
well. The result is shown in Listing 7.
s t a t e _ u p d a t e ( Z1 , s w itch T oMed i umSpe e dVeh i cleA (A,
_ , _ ) , Z2 , [ ] ) :−
upd ate ( Z1 ,
% p o s i t i v e e f f e c t : a d d in g medium s p e e d %
[ c o o r d i n a t o r V e h i l c e A I s S e t T o (A, mediumSpeed ) ] ,
% n e g a t i v e e f f e c t : r e m o v i ng low s pe e d AND
h i g h s p e e d %
[
c o o r d i n a t o r V e h i l c e A I s S e t T o ( A, l owSp eed ) ,
c o o r d i n a t o r V e h i l c e A I s S e t T o ( A, h i g h S p eed ) ] ,
Z2
) .
Listing 7: Example of optimized state update statement of
an action.
Certain self-transitions can be omitted as well. For
example, it is not necessary to set the speed in cruise
control to high speed if it is already at high speed.
However, for the sake of verification, the approach
described above is sufficient and further optimizations
are omitted here.
With the approach defined above, the environ-
ment part is transformed accordingly. After the trans-
formation, the Coordinator shown in Figure 3 al-
ready contains the means to resolve conflicts of fea-
tures. This approach is similar to the one introduced
by Bocovich et al. (Bocovich and Atlee, 2014) (and
sketched above), since actions may influence the same
variable. In contrast, in our case the variable is not a
single statement, but a value of different terms. The
conflict between the values of these terms are resolved
in the coordinator according to the definition in (Rath-
mair et al., 2016). Although we do not use the same
variable, the approach of Bocovich et al. could be
implemented as well. Currently, our model uses re-
quMediumSpeedDC and requMediumSpeedCC to de-
fine values of terms related to DC and CC. However,
there could also be one general term requestSpeedIs-
SetTo(speed, Value) that states a request on the speed
variable. In this case, the variable resolution of Bo-
covich et al. can be used directly.
Verification of Feature Coordination using the Fluent Calculus
175

4 VERIFICATION BASED ON
THE FLUENT CALCULUS
USING A PLANNER
Much as verification through (unbounded) model
checking provides a proof (or disproof) of given prop-
erties (such as strict avoidance of a collision situa-
tion), we strive for such a verification based on the
Fluent Calculus. A key question is how to handle
such a property in this context, and how to check
it. The Situation Calculus and the Fluent Calculus
have been used traditionally, e.g., for robot planning,
where a formula specifies a goal condition. In such
a setting, the planner tries to find a sequence of ac-
tions (called a plan) that leads to a situation where this
condition is fulfilled. Our key idea for verification us-
ing a planner is to formulate a property to be avoided
(e.g., a collision) as a goal condition. If the planner
finds a related plan for achieving such a goal condi-
tion, then it actually presents an example of what is
to be avoided. This corresponds to a counterexample
in model checking. Otherwise, however, the planner
needs to perform an exhaustive search that does not
find any such goal for proving that no property viola-
tion can occur. Note, that this approach uses a plan-
ner for verification, while the approach in (Bensalem
et al., 2014) uses a model checker for planning.
Under such an exhaustive search regime, each and
every combination of actions is visited, so that the
search space is fully explored. Any search approach
could be used, in principle, for implementing such an
exhaustive planner. We chose depth-first search be-
cause of its linear-space requirements, and since it is
already provided in the PROLOG-based tool environ-
ment. In essence, all possible sequences of actions are
tried recursively until a situation with the given goal
condition is found, or all possibilities are exhausted.
Starting from the given root node, the first child node
is generated. From this newly generated node, again
the first child node is generated. In this way, the
depth-first search follows one path in the tree until
it cannot be extended any further (having reached a
leaf node), from where it backtracks to the previous
node and continues with the next node, etc. This is
illustrated in Figure 5(a). This search continues until
a situation satisfying the goal condition is found, or
there is no further action to be tried.
It is well known, however, that depth-first search
can, in general, result in infinite cycles. This hap-
pens if and when an action leads from one situation
to an already visited situation on the same path. Fig-
ure 5(b) illustrates an example of such a cycle. To pre-
vent this, usually the already visited nodes are stored
for guaranteeing that only new situations are explored
Figure 5: Search space of planner.
in each path. When the already visited situations are
stored, the search can look them up and recognize that
a newly generated situation, e.g., node S3 in the fig-
ure, is the same as an already visited one, e.g., node
S1. This path is terminated and the planner backtracks
to continue with the next situation, e.g., node S4. With
this cycle detection and avoidance, a termination of
the search is guaranteed for a finite state space.
Storing only the visited nodes for the path from
the root to the currently visited situation has linear-
space requirements. However, this may lead to visit-
ing situations more than once, if they can be reached
from the root via several different paths. This is called
a directed acyclic graph (DAG). An example of such
a graph is illustrated in Figure 5(c). We chose to store
all visited states for detecting DAGs as well and for
terminating corresponding branches. For example, in
Figure 5, node S3/S6 can be reached through two dif-
ferent paths. However, the child nodes of S3/S6 only
have to be expanded once. When arriving again from
node S5, the path can be terminated. In general, this
approach has exponential space requirements, but it
can still be used when enough storage is available
(like in our example). For implementing such an ap-
proach to storing nodes, many PROLOG engines pro-
vide a tabling technique. The engine in ECLiPSe,
however, has no built-in support for tabling, which
made a custom implementation necessary.
So far, this planning approach looks straight-
forward, but there is an intricacy involved. As de-
scribed in the previous section, each FSM has a
predicate with corresponding actions. In the model-
checking tool NuSMV (used in (Rathmair et al.,
2016)), all state transitions of all the synchronous
FSMs happen in one execution cycle. This is in con-
trast to our planner, where the actions are executed
one after the other. To ensure that each part of the
overall system has all information available for its ex-
ecution, a linearization is required. Since some parts
of the system depend on environment values, a spe-
cific order of execution can be derived. For exam-
ple, the distance control depends on the value of the
distance classification. The coordinator depends on
ENASE 2018 - 13th International Conference on Evaluation of Novel Approaches to Software Engineering
176

the distance and cruise control. In contrast, the cruise
control and vehicle B do not depend on the other parts
of the model. Hence, a possible execution sequence
for the planner is:
1. Vehicle B
2. CC (of vehicle A)
3. DC (of vehicle A)
4. Coordinator (of vehicle A)
5. Distance classification
However, this execution sequence does not take
into account that sensor values can only be read with
a delay, which is essential in the model in (Rathmair
et al., 2016). Since the distance control measures the
speed of vehicle B and also the distance, there is such
a delay involved. In the original model of (Rathmair
et al., 2016), this is solved by using temporary vari-
ables that hold the values of the previous cycle. In
our approach, this delay of sensors is implemented
by rearranging the execution sequence of the actions.
Since DC has to use the values of the previous cycle,
the actions of vehicle B and the distance classification
are the last steps in an execution cycle. By doing so,
DC can only access the values of the previous cycle,
since the new values are generated thereafter. Fig-
ure 6 illustrates this execution cycle actually used by
our planner, whose implementation in FLUX is given
in Listing 8.
Figure 6: Execution cycle.
s c h e d u l e _ p l a n ( Z , P , Zn ) :−
(
% f i r s t : e x e c u t e CC %
schedul e _ p l anCCA (Z , P , Z1 ) ,
% s econ d : e x e c u t e DC, u s e r e s u l t of CC a s
world s t a t e %
sched u l e_pla n D CA ( Z1 , P , Z2 ) ,
% t h i r d : e x e c u t e C o o r d i n a t o r , u s e r e s u l t o f
DC a s w o r l d s t a t e %
s c h e d u l e _ p l a n C o o dA ( Z2 , P , Z3 ) ,
% f o u r t h : e x e c u t e V e h i c l e B , u s e r e s u l t o f
C o o r d i n a t o r a s w o r l d s t a t e %
s c h e d u le_ p l a n V e hB ( Z3 , P , Z4 ) ,
% f i f t h : e x e c u t e D i s t a n c e C l a s s i f i c a t i o n , u s e
r e s u l t o f V e h i c l e B a s w o r l d s t a t e %
s c h e d u l e _ p l a n D i s t a n c e ( Z4 , P , Z5 )
) ,
s c h e d u l e _ p l a n ( Z5 , P , Zn ) . % c o n t i n u e w i t h n e x t
c y c l e %
Listing 8: Planner in FLUX.
Each schedule planXX statement calls a function
that determines, which specific action of the FSM is
executed. The possible actions are all actions that are
generated for a specific FSM. Only one of the actions,
based on their preconditions, is chosen and executed.
Listing 9 shows the possible actions for Vehicle B.
s c h e d u l e _pla n S p e e d V e hB ( Z , [ VehB | P ] , Zn ) :−
( VehB= s w itchTo L o w SpeedV e h icleB ( _ ) ,
p o s s ( VehB , Z ) , s t a t e _ u p d a t e ( Z , VehB , Z1 , [ ] ) ) ;
( VehB= s witch T o Mediu m Speed V e hicl e B ( _ ) ,
p o s s ( VehB , Z ) , s t a t e _ u p d a t e ( Z , VehB , Z1 , [ ] ) ) ;
( VehB= swit c h T o H i g hSpe e d V e h i c l eB ( _ ) ,
p o s s ( VehB , Z ) , s t a t e _ u p d a t e ( Z , VehB , Z1 , [ ] ) ) ;
( VehB= " VehB − N o t h i n g " , Z1=Z , t r u e ) .
Listing 9: Vehicle B planner.
The sequence given in Listing 8 is executed until
the goal state is reached or the exhaustive search is
finished. In our case, the goal condition is a property
to be avoided. It is fulfilled if and when the distance
classification detects a collision. Listing 10 specifies
this property in FLUX.
s c h e d u l e _ p l a n ( Z , _ , Z ) :−
knows_val ( [ D i s t a n c e ] , d i s t a n c e I s S e t T o ( D i s t a n c e ,
c o l l i s i o n ) , Z ) .
Listing 10: Property to be avoided.
5 CONTRASTING WITH MODEL
CHECKING
Now let us contrast this new approach with model
checking. We do this in terms of verification results,
execution time for verification of our example, and
conceptually.
First of all, it is important that our new approach
using the Fluent Calculus delivers the same verifica-
tion results as model checking (as reported in (Rath-
mair et al., 2016)). Hence, we ran the planner as spec-
ified above, and it did not find a plan (a sequence of
actions) leading to a goal specified through the colli-
sion property. This verified the model, and this veri-
fication result is consistent with the verification result
reported in (Rathmair et al., 2016) for the model that
we transformed ours from systematically (as specified
above). Rathmair et al. model-checked a slightly sim-
pler model as well (one without the Too Close state in
the distance classification). This led to a counterex-
ample of a collision. We modified our derived model
in the same way and, in fact, our planner found a se-
quence of actions leading to a goal state with the colli-
sion condition. Therefore, also our approach based on
the Fluent Calculus did not verify this simpler model.
Again, this result is consistent with the one reported
in (Rathmair et al., 2016).
Verification of Feature Coordination using the Fluent Calculus
177

According to (Rathmair et al., 2016), a verifica-
tion run against the collision property using the model
checking tool NuSMV takes a fraction of a second
on a usual PC. We measured the execution times
needed for verification by our planner, and they are
also within a fraction of a second.
Hence, for this minimalist model, the execu-
tion times for verification are negligible for both ap-
proaches. As our planner is not really optimized for
speed, it is conceivable that model checking will run
faster for larger search spaces than our planner. Still,
such a comparison for scaling is left for future work.
Anyway, in theory the complexity is the same for both
approaches (without bounds).
We use the Fluent Calculus as a means for veri-
fication in this paper, but such a model may be used
for other purposes as well. Since the model primar-
ily specifies actions, these specifications may also be
used for planning or plan execution. After all, re-
lated approaches have been proposed long time ago in
the context of robot planning and execution, see, e.g.,
(Nilsson, 1982). This is in contrast to model check-
ing, where only verification is possible.
6 CONCLUSION
In this paper, we propose a new approach to formal
and automated verification based on the Fluent Cal-
culus. While previously only the specification of a
software feature coordinator was published in (Bo-
covich and Atlee, 2014), our approach can formally
verify it. This requires additional models of the en-
vironment (an autonomous agent and some simple
physics), which facilitate verifying safety of software
more generally.
This approach is fully implemented for the model
in (Rathmair et al., 2016), from which our represen-
tation in the Fluent Calculus is systematically trans-
formed from. We also propose this transformation
here, which could be more generally used for deriving
representations in the Fluent Calculus. This calculus
(much as the Situation Calculus) is usually employed
for planning and plan execution, where re-planning is
more flexible at run-time than using FSMs.
It is hard to judge, in general, which formal veri-
fication approach is easier to use. For someone hav-
ing specified a feature coordinator according to (Bo-
covich and Atlee, 2014) through such a calculus, us-
ing it for verification purposes as well seems more
appropriate than using FSMs and model checking.
ACKNOWLEDGMENT
The FeatureOpt project (No. 849928), is funded
by the Austrian Federal Ministry of Transport, In-
novation and Technology (BMVIT) under the pro-
gram “ICT of the Future” between June 2015 and
May 2018. More information can be found at
https://iktderzukunft.at/en/.
REFERENCES
Apel, S., Batory, D., K
¨
astner, C., and Saake, G. (2013).
Feature-Oriented Software Product Lines: Concepts
and Implementation. Springer.
Baier, C. and Katoen, J.-P. (2008). Principles of Model
Checking. MIT Press, Cambridge, MA, USA.
Bensalem, S., Havelund, K., and Orlandini, A. (2014). Ver-
ification and validation meet planning and scheduling.
International Journal on Software Tools for Technol-
ogy Transfer, 16(1):1–12.
Bocovich, C. and Atlee, J. M. (2014). Variable-specific
resolutions for feature interactions. In Proceedings
of the 22Nd ACM SIGSOFT International Symposium
on Foundations of Software Engineering, FSE 2014,
pages 553–563, New York, NY, USA. ACM.
Hoch, R., Kaindl, H., Popp, R., Ertl, D., and Horacek,
H. (2015). Semantic Service Specification for V&V
of Service Composition and Business Processes. In
Proceedings of the 48nd Annual Hawaii International
Conference on System Sciences (HICSS-48), Piscat-
away, NJ, USA. IEEE Computer Society Press.
Jackson, M. and Zave, P. (1998). Distributed feature com-
position: A virtual architecture for telecommunica-
tions services. IEEE Transactions on Software En-
gineering (TSE), 24(10):831–847.
Juarez-Dominguez, A. L., Day, N. A., and Joyce, J. J.
(2008). Modelling feature interactions in the automo-
tive domain. In Proceedings of the 2008 International
Workshop on Models in Software Engineering, MiSE
’08, pages 45–50, New York, NY, USA. ACM.
Levesque, H. J., Reiter, R., Lesp
´
erance, Y., Lin, F., and
Scherl, R. B. (1997). Golog: A logic programming
language for dynamic domains. The Journal of Logic
Programming, 31(1):59 – 83.
McCarthy, J. and Hayes, P. J. (1969). Some philosophi-
cal problems from the standpoint of artificial intelli-
gence. In Meltzer, B. and Michie, D., editors, Machine
Intelligence 4, pages 463–502. Edinburgh University
Press, Edinburgh.
Nilsson, N. J. (1982). Principles of Artificial Intelligence.
Springer, Berlin, Heidelberg, Germany.
NuSMV (2014). NuSMV: a new symbolic model checker.
Rathmair, M., Luckeneder, C., and Kaindl, H. (2016). Min-
imalist qualitative models for model checking cyber-
physical feature coordination. In Proceedings of the
23rd Asia-Pacific Software Engineering Conference
(APSEC), USA. IEEE.
Reiter, R. (1991). The frame problem in situation the cal-
culus: A simple solution (sometimes) and a complete-
ENASE 2018 - 13th International Conference on Evaluation of Novel Approaches to Software Engineering
178

ness result for goal regression. In Lifschitz, V., ed-
itor, Artificial Intelligence and Mathematical Theory
of Computation, pages 359–380. Academic Press Pro-
fessional, Inc., San Diego, CA, USA.
Schiffel, S. and Thielscher, M. (2005). Interpreting golog
programs in flux. In In 7th International Symposium
On Logical Formalizations of Commonsense Reason-
ing, The, USA. AAAI Press.
Thielscher, M. (1998). Introduction to the Fluent Calculus.
Electron. Trans. Artif. Intell., 2:179–192.
Thielscher, M. (2005). FLUX: A logic programming
method for reasoning agents. TPLP, 5(4-5):533–565.
Winner, H. and Schopper, M. (2015). Adaptive cruise
control. In Handbuch Fahrerassistenzsysteme, pages
851–891. Springer.
Verification of Feature Coordination using the Fluent Calculus
179
