
The Use of Electroencephalogram and Electrodermal Signals in
Reinforcement Learning of a Brain-Computer Interface
Werley de Oliveira Gonçalves
1
, Gizelle Kupac Vianna
1,2
and Luiz Maltar Castello Branco
2
1
Programa de Pós-Graduação em Modelagem Matemática e Computacional, Instituto de Ciências Exatas,
Universidade Federal Rural do Rio de Janeiro, Seropédica, Brazil
2
Departamento de Computação, Instituto de Ciências Exatas,
Universidade Federal Rural do Rio de Janeiro, Seropédica, Brazil
Keywords: Brain-Computer Interface, Intelligent Control Systems, Pattern Recognition, Artificial Neural Networks,
Electroencephalogram Signal, Electrodermal Signal, Computational Intelligence.
Abstract: The objective of this work is to compare the performance of two brain-computer interfaces developed by our
research group. Both interfaces collect the electrical signals produced by the human body while a person try
to move a cursor on a digital screen, using only his thought. The collected signals are classified using the
artificial neural networks paradigm, where the first interface uses electroencephalogram signals, collected
from the scalp, to classify the mental command, and the second uses the electrodermal signal, collected from
any right-hand finger. Besides analysing the performance of the two approaches, this research contributes to
reduce the training time achieved by similar systems, reported in the literature as being in an average of 45
days, to about only 40 minutes. Our motivation is to facilitate the accessibility of people with temporary or
permanent physical limitations. In addition, we have developed a low-cost signal collection platform,
providing a solution that can help a large group of people.
1 INTRODUCTION
The limbic system has an important role in
controlling the human emotions such as motivation,
stress and rage (Boucsein, 2012a). The limbic system
integrates the sensory information from the
environment with the emotional state, where an
affective value is attributed to these stimuli, such as
fear or pleasure. A positive feedback signal is sent for
each action or intention of action performed correctly,
resulting in the reinforcement of some synapses. In
the other hand, wrong actions or intentions are
discouraged by a similar mechanism (Amaral, 2016),
(Nishida, 20126). In summary, the limbic system
generates a signal of approval or rejection for every
action we take, allowing a person to distinguish
among what he likes or dislikes.
Although the limbic lobe is located in the inner
part of the brain, from where it is very difficult to
collect signals through an electroencephalogram
(EEG), this system also controls the electrodermal
(EDA) response, which is the electrical signal present
on the skin and its glands. The EDA phenomenon is
spontaneous and results from changes induced by a
complex system of elements with different
electrophysical properties. Moreover, the skin can be
modeled by a set of resistors and capacitors, in
relatively simple way, the EDA system can be a fast,
low cost and low stress training method for brain-
computer interface (BCI) applications (Boucsein,
2012a), (Blain, 2008).
On the other hand, another important brain
interface is the EEG, whose responses are stationary
in nature and vary at each recording session. The
procedure for collecting EEG signals uses external
electrodes and it is safe, inexpensive, non-invasive,
with a satisfactory time resolution for most BCI
studies and applications (Leskov, 2000), (Iacoviello,
2015). The captured signals are a composition of
many electrical signals emitted by the human body,
which means that some unwanted signals may be
captured too. Fortunately, those useless signals can be
easily eliminated through specific filters (Noteboom,
2001).
Applications based on EEG signals could allow an
interaction between the environment and people,
translating their imaginary movements into electrical
signals. The construction of a limbic signal translator
Gonçalves, W., Vianna, G. and Branco, L.
The Use of Electroencephalogram and Electrodermal Signals in Reinforcement Learning of a Brain-Computer Interface.
DOI: 10.5220/0006773305330539
In Proceedings of the 20th International Conference on Enterprise Information Systems (ICEIS 2018), pages 533-539
ISBN: 978-989-758-298-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
533

system can provide a wide range of home automation
applications, such as control systems for switching
electric household appliances, or for similar use in
hospitals.
In some researches, the BCI system has proven to
be a promising tool for applications that help people
with severe motor limitations and for the
implementation of remote medical devices (Lin,
2016) (Boucsein, 2012a). Based on these premises,
our work aims to reduce the training time needed to
customize the translation of the limbic signal to
people with limitations in their motor capacities,
whether temporary or permanent. This can be useful
in situations where a person cannot wait a long time
until he can start using such a system, as during a
hospital stay.
The paper is organized as follows. In section 2 we
present the state art of approaches for modeling of
control system based on brain signals in BCI
applications. Section 3 provides a description of our
control system and the steps of the developed
algorithm since collecting the signals until the final
movement of the cursor on the screen. Subsequently,
in section 4 we conclude with a discussion of our
results. Finally, section 5 describe future research
directions.
2 MODELING OF CONTROL
SYSTEM
2.1 Electrodermal Activity
It has already been proven that the EDA signal (also
known as galvanic skin response) can be used in BCI
applications (Blain, 2008). We can consider the skin
as a set of resistors and capacitors, where the glands
are represented by a voltage source or by charged
capacitors. In 1966, Montazu and Coles (Nishida,
2016) proposed an electric model of the skin, which
can be represented by (1):
(1)
In (1), resistor R1 represents the equivalent
resistance located in the dermis, resistor R2 models
the resistance of the outermost layer of the skin, and
resistance Rtot models the value of all sweat glands.
It has already been found that many lesions of the
spinal cord do not prevent the EDA signal from
remaining present. In individuals with lesions below
T8, the EDA signal can be detected in both hands and
feet, but for lesions between T4 and T8, the signal is
only present in the hands (Boucsein, 2012b).
2.2 Electroencephalogram Signals
We detected the EEG signals based on the
international system 10-20, which divides the skull
into 21 points (Plonsey, 1995). The signals captured
by the EEG are composed by brain signals combined
with several other electrical signals emitted by the
human body. However, we are only interested in the
signals that reflect the intentions of the user and we
need to eliminate everything that is considered as
noise. For the procedure of signal filtering, we choose
the discrete Fourier transform (Najarian, 2006).
2.3 The Μ Wave
The 8-12 hz wave and 12-30 (beta waves) are directly
related to the motor regions of the cerebral cortex,
what give them a great potential in BCI applications
(Zhao, 2015). The main advantages of using μ waves
are their capability of training a user to control the
amplitude of these waves, and the fact that the
muscular movements cannot interfere in the
amplitude of these waves.
Wolpaw (1991) has already shown that a person
can be trained to use the brain waves of 8-12hz to
move a one-dimensional cursor. The author has
developed a system in which a user moves a cursor
vertically to reach a moving target. Five volunteers
participated in an experiment that collected the
signals with frequency of 3hz and subdivided their
amplitude into 5 bands of μV. The amplitude of the
collected signal is used to proportionally increase or
decrease the size of the cursor offset. However,
despite achieving a success rate of almost 90%, the
training time for correct use of μ waves was up to
three months.
Jun (Jun, 2015) collected μ waves from the two
cerebral hemispheres and considered them as binary
data, combined two by two, forming six different
combinations. Each combination is used to identify
commands that activate a mechanical arm (Jun,
2015).
3 MATERIAL AND METHODS
The purpose of this paper is to classify the electrical
signals emitted by the brain and use then to vertically
move a cursor on a digital screen. Two types of
electrical signals were analysed to evaluate which one
has the best performance in the purposed task. In
ICEIS 2018 - 20th International Conference on Enterprise Information Systems
534

both, an ANN is used to classify the signal and to
decide whether the cursor should go up or down.
In the experiment using EEG signals, these are
collected according to the international 10-20
mapping system, which specifies that the electrodes
should be attached to the C3 or C4 positions of the
skull (Figure 1).
Figure 1: The international 10-20 mapping system of the
skull (Wikipedia, 2018).
During the initial testing phase, we verified the
need for signal amplification and filtering. So, we
opted for the Chebychev bandpass filter and shielded
the circuit to eliminate the noises, including those
generated by electrical installations.
The collected signal was analog but we
discretized in the frequency domain. For the
discretization, we opted for the discrete Fourier
transform, obeying the Nyquist criterion, where the
sampling frequency must be at least twice as high as
the highest frequency present in the original signal
(Oliveira, 2017).
In the experiment using EDA signals, they can be
collected through any hand finger (Plonsey, 1995),
(Spliter, 2006).
3.1 Data Treatment and Analysis
Our experiments have shown that feelings of
frustration, anxiety and nervousness decrease the
amplitude of the EDA signal, while feelings of
surprise and satisfaction increase their amplitude. In
both cases, this variation is almost instantaneous,
occurring soon after the generation of the pulse. After
this change, the signal converges slowly to its base
value.
At the first step of the EDA experiment, we
generate labelled samples of each type of signal to
obtain a set of data for the ANN's training phase. The
samples are built by classifying each collected signal
as neutral, frustration or surprise (when the cursor did
not move, move in the wrong direction or move in the
correct direction, respectively). The EEG experiment
was conducted in a similar way.
For the signal collection, an intermittent message
is positioned at the top or bottom of the screen,
alternately, and the volunteer should try to move the
cursor to the indicated direction, using only his
thought. Each collection set results in 200 samples,
divided between 100 thoughts of rise and 100 of
descent.
After performing a relevance analysis of each
frequency collected, in each type of signal, the
frequencies of 8, 10, 12, 16, 18 and 20hz were
selected for the two types of signal (EDA and |EEG),
where the 10 and 12hz are the best all, since they are
found within the spectrum of waves μ.
For the ANN, we chose a backpropagation MLP,
a model that is proven to be suitable for pattern
recognition problems. We tested different
combinations of neural network parameters and
architectures, where each configuration was tested 50
times. The model with the best performance was a 4-
2-1 network, using a quasi-Newton Broydon-
Fletcher-Goldfarb-Shanno (BFGS) function method
to calculate the minima of a multi-variable objective
function (Mathworks, 2016), learning rate of 0.6 and
momentum rate of 0.9. The network inputs were the
frequencies 8, 10, 12, 16, 18 and 20hz and the output
was set to 0 (for down moves) or 1 (for up
movements). For each individual training conducted,
samples were randomly separated at a rate of 80% for
training and 20% for testing.
For both signal type (EEG and EAD), the
necessary steps, from collecting the signals to the
final movement of the cursor on the screen, can be
summarized by the following algorithm:
1. System training: an initial collection of signals
is conducted and each of them is stored with
its classification, UP or DOWN. At this stage,
the cursor does not move, and the goal is only
to generate a personal signal pattern for the
user.
2. Training of an initial neural network RNA0:
using the labelled signal samples generated in
phase 1, and neural network with the
architecture and parameters defined as
explained in section 3.1, the goal is to train a
personalized network for the user. Fifty
complete trainings were performed in the
neural network RNA0 to select the one that
presented the best performance, using a class
separation threshold of 0.5.
3. Collection of signal: A new collect occurs and
now each of them will be classified by the
The Use of Electroencephalogram and Electrodermal Signals in Reinforcement Learning of a Brain-Computer Interface
535
RNA0 and the cursor will be moved
accordingly.
4. Training of neural network RNA1: Training of
a new neural network, RNA1, using the
signals generated in phase 3, with the same
architecture, parameters and class separation
threshold of RNA0, to provide an updated
network for the user, assuming that his ability
should have improved after the initial
experiment. Again, 50 complete trainings
were performed in RNA1 to select the best
performance one.
5. Steps 3 and 4 are repeated twice until the
RNA3 is trained, which corresponds to four
test cycles.
4 RESULTS AND DISCUSSION
The experiment lasts, on average, 35 minutes and
Table 1 shows the performance obtained at each step
of the algorithm, for the EEG signal. From its
analysis, we can verify that the best performance is
found at step 2, when RNA1 is used to classify the
second set of signals, and after that it tends to
decrease. We can explain this by the intrinsic
characteristics of the experiment, which caused a
certain mental fatigue to all volunteers. In special, for
volunteers 3 and 7 the performance of RNA3 was
lower than RNA0, maybe reflecting their state of
tension, who were visibly worried through all the
experiment. A similar experiment, using the previous
algorithm, but the EDA signal instead of EEG, was
conducted and the results are shown in Table 2.
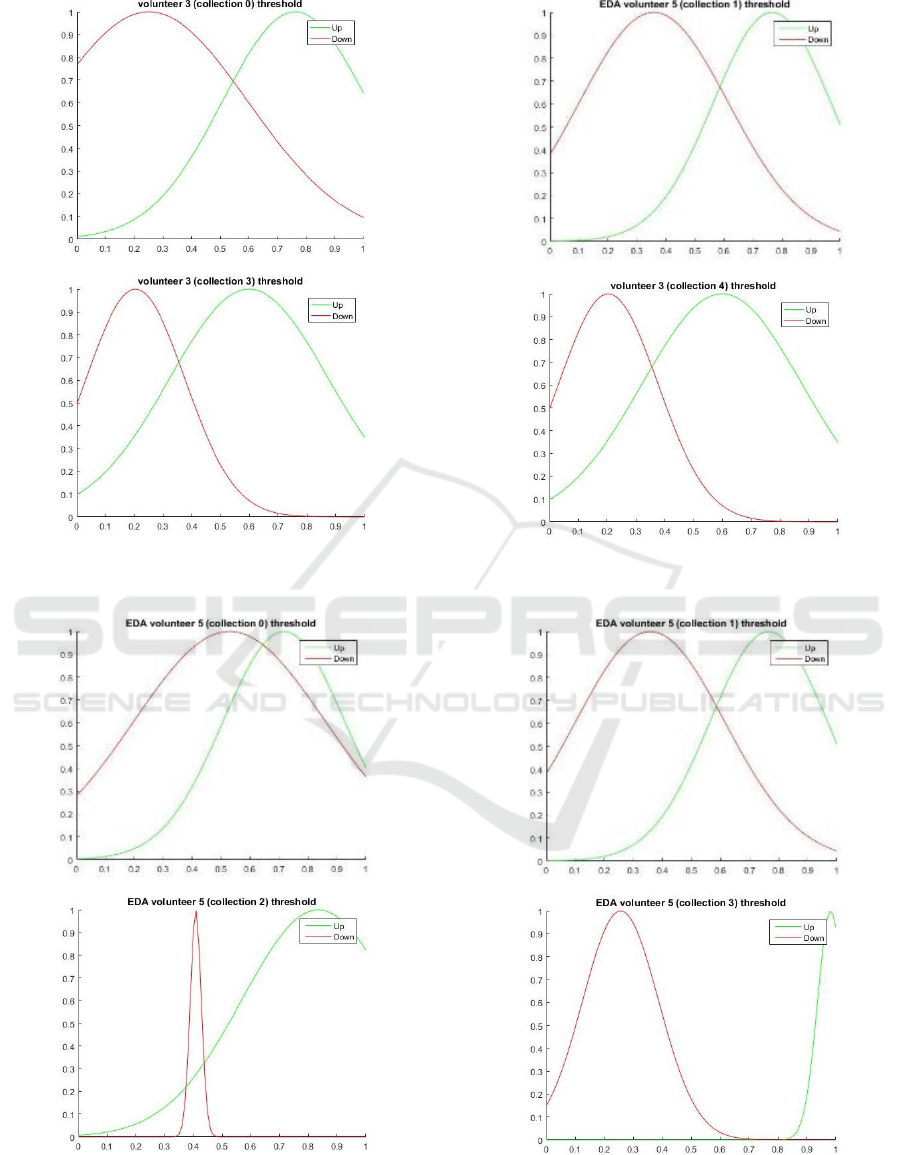
In Figure 2, we show the distribution curves of the
EEG signals collect at each phase of the experiment,
from volunteer #3. From the analysis of these graphs,
we can see that the distributions of the two types of
mental commands are indeed distinct, especially
during the first and the second phases. After that, the
performance begins to fall, as shown by the greater
approximation between the curves, increasing the
area of confusion between the signal patterns.
In Figure 3, we show the distribution curves of the
EDA signals collected in each phase of the
experiment, from the volunteer # 5. Differently from
the distribution of EEG signals, the EAD distributions
show that, for this type of signal, the performance
continues to improve as new trainings are conducted.
Table 1: EEG recognition performance during the training phase of the neural networks.
Volunteer
%Hints of
ANN
0
%Hints of
ANN
1
%Hints of
ANN
2
%Hints of
ANN
3
1
56.52
78.26
69.57
60.87
2
73.91
78.26
82.61
73.91
3
60.87
78.26
65.22
73.91
4
60.87
65.22
86.96
78.26
5
65.22
65.22
82.61
73.91
6
69.57
73.91
60.87
78.26
7
73.91
73.91
82.61
78.26
8
73.91
69.57
78.26
78.26
Table 2: EDA recognition performance during the training phase of the neural networks.
Volunteer
%Hints of
ANN
0
%Hints of
ANN
1
%Hints of
ANN
2
%Hints of
ANN
3
1
78.94
78.94
47.37
78.95
2
73.68
63.16
63.16
84.21
3
63.16
89.47
84.21
78.95
4
65.52
65.52
82.76
65.52
5
62.07
75.86
82.76
100
6
84.21
73.68
78.95
78.95
7
82.36
85.29
70.59
67.65
8
61.76
82.35
82.35
85.29
ICEIS 2018 - 20th International Conference on Enterprise Information Systems
536
(a)
(b)
(c)
(d)
Figure 2. Distribution of EEG signals for the thoughts of rise (green) and fall (red) of volunteer #3.
(a)
(b)
(c)
(d)
Figure 3: Distribution of EDA signals for the thoughts of rise (green) and fall (red) of volunteer #5.
The Use of Electroencephalogram and Electrodermal Signals in Reinforcement Learning of a Brain-Computer Interface
537

5 FUTURE WORK
The EDA signal is controlled by the limbic system
(Fausett, 1994), which also generates the approval
and disapproval responses, defining our choices and
actions (Boucsein, 2012b). Proper modelling of this
behaviour can generate interesting solutions for
people with such severe physical limitations that they
cannot express their needs and feelings. Since the
electronic circuit used in this work has a low cost, the
use of EDA can, more quickly than conventional BCI
using EEG, generate solutions that reach a larger part
of the population.
Other studies found in the literature related the use
of the EDA signal to correct the commands generated
by the EEG signal (Boucsein, 2012a), but we have
shown in this work that the training time of a BCI
application can be reduced by using the EDA signal
instead of the EEG. In addition, the technology
developed by our research group, which included the
design and development of a custom acquisition
circuit, can reduce the cost of this type of BCI
application, opening possibilities for its use in other
fields of research. While a wifi EEG headset plus
electrodes could cost almost U$800.00, an EDA
detector can be bought by only U$10.00.
The choice for the ANN paradigm for signal
recognition was also a good decision. As we
predefine the network architecture and training
parameters, and parameterize the training process,
potential users of our BCI system do not need any
technical knowledge to learn how to use it.
For a future work, it will be interesting to explore
the limits of the EDA signal applied to BCI, such as
collecting EDA signals from more than one region,
for example, from the right and left hand at the same
time. The combination of these signals could increase
the variety of responses and, consequently, the
number of possible BCI applications. Tsukahana
(2002) presents another approach for electrodermal
signal codification, generating more than one binary
signal to increase the choices of movements for the
user.
REFERENCES
Amaral, J. R. Homepage, http://www.cerebromente.org.br/
n05/mente/limbic.htm, last accessed in 10/21/2016,
2016.
Blain, S.; Mihailidis, Al.; Chau, T. Assessing the Potential
of EDA Activity as an Alternative Access Pathway. In
Medical Engineering Physics, pp 498-505, 2008.
Boucsein, W. Principles of Electrodermal Phenomena in:
Eletrodermal Activity. Second Edition: New York:
Springer, pp. 1-76, 2012a.
Boucsein, W. EDA Activity, Second Edition. In: Springer
Science+Business Media, 2012b.
Fausett, L. Fundamentals of Neural Networks –
Arquitetures, Algorithms and applications, 1nd Edition,
Prentice-Hall, pp. 1-37, 59-76, 1994.
Iacoviello, D.: A Real-time Classification Algorithm for
EEG - Based BCI driven by Self-induced emotions. In:
Computer Methods and Programs in Biomedicine, vol.
122, pp. 293–303, 2015.
Jun, J.; et al.: A novel Morse code inspired method for
multiclass motor imagery brain–computer interface
(BCI) design. In: Computers in Biology and Medicine,
pp. 11–19, 2015.
Leskov, I. F., Lopes, H.: Amplificador e Filtros de Baixo
Custo para Sinais de EEG (Eletroencefalografia). In:
Simpósio Internacional de Iniciação Científica da USP,
São Carlos. XVII Congresso de Iniciação Científica e
Tecnológica em Engenharia, 2000.
Lin, J. S., Hsieh, A.: A Wireless BCI-Controlled Integration
System in Smart Living Space for Patients. In: CH.
Wireless Pers Commun, vol. 88: 395. doi:10.1007/
s11277-015-3129-0, 2016.
Mathworks. Homepage: https://www.mathworks.com/
help/nnet/ug/multilayer-neural-network-
architecture.html, last accessed in 2016/08/15.
Najarian, Kayvan; Splinter, Robert. (s.d.).
Electroencephalogram in: Biomedical Signal and
Image Processing, CRC Press – Taylor & Francis
Group, pp 197-216, 2006.
Narendra, Kumpati S. Adaptative Control Using Neural
Networks. In: SUTTON, Richard S.; WERBOS, Paul
J.; MILLER III, W. Thomas,“Neural Networks for
Control”, MIT Press, vol. 211996. pp.115–142.
Nishida, S. M.: Neurobiologia das emoções - SISTEMA
LÍMBICO, Homepage, http://www.ibb.unesp.
br/Home/Departamentos/Fisiologia/Neuro/aula27.siste
ma_limbico_silvia.pdf, last accessed in 10/28/2016,
2016.
Noteboom, J. T.: Activation of the arousal response can
impair performance on a simple motor task. In: Journal
of Applied Physiology, vol. 91, pp.:821-831, 2001.
Oliveira, K. S., Homepage: http://astro.if.ufrgs.br/
med/imagens/fourier.htm, last accessed 06/28/2017,
2017.
Plonsey, J. M.: Bioelectromagnetism. In: J. Malmivuo,
Bioelectromagnetism - Principles and Applications of
Bioelectric and Biomagnetic Fields, New York: Oxford
University Press, cap 13, 1995.
Spliter, K. N. In: Biomedical Signal and Image Processing,
CRC Press - Taylor & Francis Group, pp 79-99, 2006.
Tsukahana, Reiko, Aoki, Hisashi. Skin potential response
in letter recognition task as an alternative
communication channel for individuals with severe
motor disability. Clinical Neurophysiology 2002, pp
1723–1733.
ICEIS 2018 - 20th International Conference on Enterprise Information Systems
538

Wikipedia, 10-20 System (EEG), Homepage:
https://en.wikipedia.org/wiki/10%E2%80%9320_syste
m_(EEG). Last accessed in 01/18/2018.
Wolpaw, J. R.: An EEG-Based Brain-Computer Interface
for Cursor Control. In: Eletroencephalography and
Clinical Neuro-physiology, pp. 252-259, 1991.
Zhao, J., Li, W., & Li, M. Comparative Study of SSVEP-
and P300-based Models for the Telepresence Control of
Humanoid Robots. PLoS ONE 10(11): e0142168.
doi:10.1371/journal.pone.0142168, 2015.
The Use of Electroencephalogram and Electrodermal Signals in Reinforcement Learning of a Brain-Computer Interface
539
