
Usage Profile Rating of Suitability to E-Vehicles Utilizing a Physical
Consumption Model
Florian Hertrampf, Sebastian Apel and Steffen Sp
¨
athe
Department of Computer Science, Friedrich Schiller University Jena, Ernst-Abbe-Platz 2, Jena, Germany
Keywords:
Electricity Consumption, Electric Vehicles, Simulation of Consumption, Timeseries Analytics.
Abstract:
The project “Wohnungswirtschaftlich integrierte netzneutrale Elektromobilitat in Quartier und Region”
(WINNER) aims to integrate shared electric vehicles, smart local grids and renewable energy in tenant house-
holds. This paper focuses on how to find the model of an electric vehicle (consumption, recharging, usage)
which perfectly matches the requirements of particular carsharing stations. This approach utilizes usage pro-
files of conventional combustion vehicles. Each profile describes booking time and distance. Applying that
information to a rating model which simulates the driving task and charges the vehicle between usages should
be able to tell how much bookings might be handled by an electric vehicle. Within this paper, we give an
introduction to our simulation system. This covers the data model, transforming bookings into driving tasks,
and the consumption and charging model itself. Further, we validate the model by using high detailed data
captured on regular routes as well as booking sets with electric vehicles. This validation shows an average
relative error of 10 % for high detailed data from and an average relative error for booking information with
known consumptions of 5 %. Finally, we present the application of our simulation system to make a decision
based on historical booking information. This application example shows that 90% usages at some station
might be handled with electric vehicles, while others should not be replaced.
1 INTRODUCTION
Mostly stated, electric vehicles (EVs) have limited
ranges until and cause the assumption that they are not
universally applicable (Bundesministerium f
¨
ur Bil-
dung und Forschung, 2013, S. 3). The question arises
as to when an EV will become usable for private use.
This issue is usually answered through generalized
studies in which not everyone sees themselves re-
flected individually. However, the following approach
implements a simulation system which helps to rate
individual usage profiles. The rating weights the suit-
ability to EVs and might help to decide if a personal
vehicle usage profile can also be managed by using
an EV. This simulation system utilizes a physical
consumption model which provides consumptions on
particular driving situations based on technical spec-
ifications of EVs as well as current real-world data,
e. g., velocity, acceleration and gradient.
This approach is made within the research project
WINNER (Chemnitzer Siedlungsgemeinschaft eG,
2017) which aims to integrate and coordinate elec-
tromobility, the energy consumption of tenant house-
holds and the local production of electricity, e. g., by
integrating photovoltaic systems into a smart local en-
ergy grid. Within the project, EVs are used via the
carsharing approach. This EV usage leads to the re-
quest about which carsharing station should use EV
as well as which might be the best EV at a particular
carsharing station. Vehicles used within carsharing
provide perfectly documented usage profiles. They
have to be our primary input, next to technical speci-
fications of EV, to rate them.
Within this paper, we want to use such usage pro-
files and rate them for suitability to EV by utilizing
a physical consumption model. Further, we want to
give an example of how well this approach works.
However, we have to implement the simulation sys-
tem itself, validate the particular components. Val-
idation is done by using detailed measurement data
gathered while driving with an i-MiEV on regular
routes. In addition, our project partner Mobiltiy Cen-
ter GmbH provides us with a set of anonymized us-
age profiles with the EV e-Golf for further validation
of our simulation system. Finally, we used another
set of anonymized usage profiles, also from Mobiltiy
Center GmbH, with various conventional combustion
vehicles for final evaluations.
446
Hertrampf, F., Apel, S. and Späthe, S.
Usage Profile Rating of Suitability to E-Vehicles Utilizing a Physical Consumption Model.
DOI: 10.5220/0006774904460453
In Proceedings of the 4th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2018), pages 446-453
ISBN: 978-989-758-293-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

The paper starts in Section 2 with related work
about physical and statistical consumption models
used in combination with EVs. Subsequently, in Sec-
tion 3, details of the intended rating procedure are pre-
sented. As a result of that, the required components
of our simulation systems are introduced, like data
model and consumption model. The resulting system
is validated in Section 5. Finally, we evaluate usage
profiles of vehicles with combustion engines in Sec-
tion 6 and discuss the results in Section 7.
2 RELATED WORK
The research area of electric vehicle simulation has
become a well known subject in the last years. Up-
coming usage of EVs improves this fact. The primary
goals of research are forecasting the available ranges
or the consumed amounts of electric energy. We can
state three principles of doing this:
1. Standard driving cycles like New European Drive
Cycle (NEDC) (Verband der Automobilindustrie,
2017)
2. Statistical analysis and artificial neural network
(ANN) (Kretzschmar et al., 2013; Gebhardt et al.,
2015; Ferreira et al., 2013)
3. Physical models of EV (Rami Abousleiman,
2015; Cedric De Cauwer, 2015; Schreiber et al.,
2014; Fetene, 2014; Zhang and Yao, 2015)
The first mentioned variant is commonly used to
get the range the car manufacturer states. The mea-
surement occurs under standard conditions, i. e. 25
◦
C
or 77
◦
F and with a mileage of 11 km. Out of that
the capacity of accumulators depends on temperature.
Thus, this standard driving cycle does not cover pos-
sible range decreases caused by lower ambient tem-
peratures.
Statistical analysis can be done if there are enough
data to examine, e. g. when using ANNs or regression
models. If this is available, we could search relations
between timestamps, traffic, driver, weather and elec-
tricity consumption. Examples of approaches like this
can be found in research projects, e. g., eTelematik
(Kretzschmar et al., 2013) and SCL (Gebhardt et al.,
2015) as well within the Electric Vehicle Assistant de-
scribed in (Ferreira et al., 2013). Especially if a fleet
of vehicles is available, we can think of this approach.
Taking up the position of a physicist, we could
develop an EV model. Using the vehicle parameters
like mass, front face or roll friction you can calculate
the forces affecting the vehicle. The corresponding
equations result in needed power and energy amount.
Rami Abousleiman (Rami Abousleiman, 2015) fol-
lows this idea. Five different routes are used to vali-
date the physical model. The consumption of electric-
ity is measured and compared to the simulated one.
Cedric De Cauwer (Cedric De Cauwer, 2015) not
only uses a physical model, a logger for Global Po-
sitioning System (GPS) coordinates and battery data
like current and voltage was used too. So very de-
tailed information is gained, and no predefined tracks
are necessary. Even the recuperation of EVs can be
involved, as shown by (Zhang and Yao, 2015). They
used a specific recuperation factor for regaining en-
ergy by breaking depending on the current velocity of
the vehicle.
3 USAGE PROFILE RATING
In case of rating the suitability of an EV based on us-
ages requires specifying the possible level of detail
of such profiles. Within our scenario, it is necessary
to limit usage profiles on a set of tuples containing
start time, duration and distance to drive. This set is
sorted by starting time. The resulting end time, based
on start time and duration, should not be greater than
the starting time of the next element. Furthermore, it
is required to recharge the EV between two elements
within the sets of usages. Thus, the EV rating consid-
ers that each usage can use as much energy as it could
have until now. Additionally, if a single usage can-
not be handled, the model should use this period as
an additional recharging phase. Based on this input,
our goal is to rate the suitability of an EV. A rating,
in this case, describes how many elements of this set
of usages can be executed by using an EV. Possible
EVs might be preselected, but it is not guaranteed that
there is already a significant amount of recorded data
for each EV-model. Based on this restriction, we can-
not easily utilize approaches like ANN or statistical
analysis. We decided to create this rating approach on
top of a physical consumption model which requires
basic car information. Information like that can be
gathered from technical specifications as well as pub-
licly available benchmark data.
The usage profile rating can finally be described as
a function which takes a vehicle configuration V and
a set of usage profile tuples U
i
which are defined as
(t
start
,t
end
,d), i. e. start time, end time and driven dis-
tance. The rating itself is defined as the ratio between
usages which can be handled and usages which can
not be done because the State of Charge (charge level
of the electric vehicle) (SoC) is going to be negative.
The resulting rating function r(V,U
0
,...,U
n
) is shown
in Equation 1. It utilizes the function d(V,U
i
) which
Usage Profile Rating of Suitability to E-Vehicles Utilizing a Physical Consumption Model
447

Usage
Prole
Consumption Charging
Vehicle Information
Rating
Simulation
Usage Splitting
Figure 1: The basic architecture of simulation system using
a usage profile and vehicle information as input and outputs
rating by utilizing a consumption and charging model.
calculates the consumption within a driving task and
the function c(V,U
i−1
,U
i
) which handles charging
tasks between two usages.
d : (V,U
i
) → 4SoC
i
c : (V,U
i−1
,U
i
) → 4SoC
i
f : (V,U
i−1
,U
i
) →
(
c(V,U
i−1
,U
i
) + d(V,U
i
) |i > 0
1 − d(V,U
i
) |i = 0
u : (V,U
0
,...,U
n
) → { j : j =
m
∑
i=0
f (V,U
i−1
,U
i
) ∧ m < n}
r : (V,U
0
,...,U
n
) →
|{e : e ∈ u(V,U
0
,...,U
n
) ∧ e ≥ 0}|
|u(V,U
0
,...,U
n
)|
(1)
4 SIMULATION SYSTEM
The simulation system, as shown in Fig. 1, realizes
the already mentioned workflow from Section 3. De-
tails on the consumption are presented in Section 4.2
and charging calculation itself is shown in Section 4.3.
The consumption and charging model require refining
the usage profile into more specific tasks. Each task
can be a driving task or a charging task. A charge task
is described by time and amount of possible charging
energy. A driving task is defined by a set of steps to
drive by. Each step describes a time, a velocity, the
temperature and gradient for this driving step. The
job of the splitting component within the simulation
system is to transform single usages into tasks. This
splitting strategy should be configurable to reflect a
different kind of situations.
4.1 Usage Splitting
Calculating consumptions based on drive tasks re-
quires detailed information on usage. In the case
of this simulation system, information should cover
tuples containing speed, duration, gradient and tem-
perature. But booking information is not that fine-
grained.
The simulation system utilizes the usage splitting
component to transform initial booking information
to generate more detailed driving tasks. The follow-
ing list will show our current available strategies to
create driving tasks based on bookings.
• Uniformly.
The most simple strategy to drive. Simply drive
the booking duration with constant velocity.
• Middling.
Adds accelerations and decelerations processes
within this chain of route tasks. The number of
accelerations and decelerations can be configured.
• CommonMiddling.
Utilizes Middling and adds calculated mean ve-
locities based on driven distances. E. g., drive
50km with 40
km
/h and everything further with
80
km
/h. Each part can be configured with a dis-
tance to drive, a mean velocity to handle as well
as the amount of accelerations and decelerations.
4.2 Consumption Model
For calculating and comparing energy consumptions,
we use the equations for kinetic, potential and rota-
tional energy. The energy budget of a single vehicle
may compare well to the values of others. But the en-
ergy loss caused by friction between tires and surface
or car body and surrounding air needs to be modelled
as well. This can be done by using the resulting fric-
tion forces and multiplying them by the actual veloc-
ity. So we gain the currently needed power to keep a
specific velocity. Multiplying by the necessary time
we calculate the consumed energy. The following list
gives a short overview.
• Air friction F
air
• Roll friction of tires F
roll
• Gradient of surface F
grad
• Inertia of vehicle F
i
• Wheel rotation caused by inertia F
wheelrot
• Engine’s torque moving the vehicle F
e
The modelling of the formerly mentioned aspects
referring to consumption needs some vehicle specific
parameters. We need the mass of the car, the mass
of the wheels (moment of inertia required), the mea-
surements and drag coefficient (front face calculation
for air drag) and the capacity of the accumulator. Out
of that, we need the temperature of the environment
and the gradient of the terrain. The latter informa-
tion is used to calculate the fractions of the gravity
force, which correspond with the tire friction (orthog-
onal force to the terrain) or the grade resistance (par-
allel to the terrain). The temperature is essential for
the capacity of the accumulator and affects the range.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
448

There are some problems with the formerly men-
tioned values. Getting the measurements etc. does not
state a problem, but the dependency of capacity on the
temperature may not linear. Furthermore, the mass of
the engine and its rotating parts cannot be found easily
in technical specifications of EV published by manu-
facturers. Furthermore, if we consider acceleration
phases, the velocity is changing as well as the acting
forces. Thus, we calculated the integrals of the forces
multiplied by travelled distances to estimate the pro-
duced and consumed energies. The results are multi-
plied by the matching distortion factor for energy con-
sumption or recuperation (Listing 2, (Hertrampf et al.,
2018)).
E
air
+ E
roll
+ E
pot
+ E
kin
+ E
rotwheel
+ E
rotengine
=
(
∆E
total
· consumptionfactor |∆E
total
> 0
∆E
total
· recuperationfactor |∆E
total
< 0
(2)
Finally, we use a factor to tare our model. The fac-
tor describes how much kilometres the evaluated car
may travel without recharging in relation to our sim-
ulation result. In fact, this factor is multiplied by the
consumed energy. For further information, a techni-
cal report is available under (Hertrampf et al., 2018).
We had no chance of validating the technical details
like air resistance coefficient or roll friction of the
EV itself. Only manufacturer’s information or gen-
eral physical information was used, e. g. roll friction
of standard tires.
4.3 Charging Model
The energy consumption can be modelled by using
an efficiency factor within our stepwise simulation.
In contrast, the charge task is not mapped onto steps.
This is caused by the lack of charging information on
the EVs. We would not have been able to check our
model according to the considered vehicles. Fortu-
nately, there is some research on this term. Moham-
mad Chahgrkhgard (Charkhgard and Farrokhi, 2010)
states a root-shaped profile for the SoC over time. Ac-
cording to this result and empirical values, we use a
double-linear charging profile. Up to a threshold of
refilled capacity the model charges with a high ef-
ficiency, afterwards, the efficiency is reduced. This
simple charging model accounts for the fact, that ve-
hicle manufacturers often state charging times up to
80% and the remaining time up to 100%.
4.4 Reality Distortion Factor
One factor can modify the consumption model of Sec-
tion 4.2. This factor might be used to overcome the
gap between the physical consumption and the real
consumption of an EV. However, the goal of this
paper is to rate usage profiles of suitability to EV
utilizing. Further, this rating is done without hav-
ing recorded driving data. To solve the problem of
missing driving data, the idea is to get this factor by
using available information driving results and com-
pare them to consumptions made by our consumption
model.
The NEDC (Verband der Automobilindustrie,
2017; Nations, 1995) is a standardized driving cycle
with a distance d
NEDC
of 11022 m which takes 1180 s
to drive. Manufacturers mostly provide results as con-
sumption per kilometre or driving range in kilometres.
The NEDC cycle measures the energy consumed after
driving the cycle two times on a roller dynamometer.
This measurement is done after a full discharge and
recharge of the vehicle.
Within our simulation system, we use this cycle
to get the energy consumption ∆E
Model
based on our
model as it would be with a specific car mass, front
face and air drag coefficient. Afterwards, we calculate
the max range of this consumption and the vehicle ca-
pacity C as the NEDC does it and compare this result
to the NEDC-range R
NEDC
a vehicle should have:
RDF ·
C
∆E
Model
=
R
NEDC
d
NEDC
The resulting ratio is used as our reality distortion
factor (RDF). This factor should compensate specific
efficiencies of the EV as well as various loss factors
between the point of measurement used by the NEDC
and the point of the simulation. The equipment is
placed between vehicle charger and main socket to
measure consumptions afterwards. Our consump-
tion model calculates energies required to change the
moving state and position of the EV.
Getting the RDF has to be an iterative process.
The NEDC causes this. We do not know the technical
efficiency of an EV, which handles the driving cycle.
So we assume at first an RDF of 1, that means, we
estimate a model consumption equal to the real con-
sumption. After driving the NEDC, we compare the
manufacturer’s given range and the simulated and cal-
culated range. Depending on this comparison we gain
a new value for the distortion. Using this number, we
rerun the simulation and use the next distortion value
obtained in this way. The steps are repeated up to
such time as we get no difference between start dis-
tortion and end distortion. Finally, we get the vehicle
specific RDF that we can use for the further evalua-
tion of usage profiles. Fig. 2 shows the progress of
the factor calculation. You can see, that 10 to 20 cy-
cles are enough to get a value changing no longer. The
Usage Profile Rating of Suitability to E-Vehicles Utilizing a Physical Consumption Model
449

i-MiEV reaches a value of approx. 1.09 for example.
0 10 20
0.8
0.9
1
1.1
Cycles
Reality Distortion Factor
Kangoo Z.E.
eNV200
i3 (94 Ah)
eup!
ZOE 22
eGolf
i3 (60 Ah)
ZOE 41
fortwo electric drive
iMiEV
Figure 2: Distortion factor plotted over number of repetitive
calculations.
5 VALIDATION
We have to show the usefulness of our model. For this
approach, we used data from tracks collected in 2013.
The tracks run from Jena to Weimar and back as well
as from Jena to Golmsdorf and back. In this section,
we give a short description of this information and
identify problems.
5.1 Specific Validation
The validation of our physical model is done by us-
ing data from a Mitsubishi i-MiEV. We use the OBD2
Port to access CAN-Bus data, i. e. the current veloc-
ity, the measured state of charge of the battery and
the needed current and voltage at a specific time. Ad-
ditionally, we have added the current GPS position.
Using the position data we called an elevation web
service (Google, 2017) to gain information on the cur-
rent gradient. The time resolution is one second. At
this point, we must state, that the quality of data is
not perfect. If we compare the velocity calculated by
the GPS locations and the velocity measured recorded
from the OBD2 Port we get differences. Furthermore,
there is a mismatch between the measured SoC and
the iterative summed up energy. So we have to choose
one single data source, or we have to interpolate be-
tween various values. We do not consider current
weather conditions or driving characteristics of spe-
cific car drivers. This validation utilizes the already
mentioned RDF.
Situations, like driving uphill, while decelerating
or driver specific behaviour, cause problems and an
error of energy consumption forecast. Driving uphill
or downhill with a large gradient is not modelled per-
fectly. For lower gradients, the prognosis gets better.
Finally, we want to present the overall error for
the i-MiEV on various tracks. Fig. 3 shows that we
get results differing from the measured consumptions
by an amount of 10 %. The error is not increasing
0 10k 20k 30k 40k 50k
0.9
0.95
1
1.05
Distance in m
Relative Error
Figure 3: Evolution of errors on various tracks depending
on track distance (vehicle i-MiEV).
15.2%
33.1%
20.8%
8.57%
5.77%
9.19%
10
20
30
40
50
75
100
150
200
300
400
500
1000
other
Figure 4: Grouped distances in usage profiles (15.2 % is
smallest category 10, other categories anti-clockwise).
constantly. Some tracks show an increasing and de-
creasing evolution. We assume that the weather con-
ditions and the driver behaviour are responsible for
this irregular process in addition to the insufficiencies
mentioned above. Considering these inaccuracies, the
error has got a small value.
5.2 Splitting
Until now, we have validated that our consumption
model calculates consumptions which are compara-
ble to measured ones. We want to use this validated
part of our simulation system and take a closer look at
the splitting component. As mentioned, this splitting
is used to get an approximated list of driving tasks
based on a usage profile U. This profile is a tuple of
distance, start and end time defined as (t
start
,t
end
,d).
Our validation is done by using real usage profiles
from EV bookings. Those bookings contain the start
and end SoC also. Thus, we know how much energy
is used by this booking. However, these information
does not include details about charging processes.
Fig. 4 visualizes more than 4.300 usages grouped
by distances done with an E-Golf which has a range of
190km measured by NEDC. As shown, most usages
are below 100 km. We decided to drop usages with
unrealistic consumptions, i. e. consumptions per kilo-
metre lower than 0.5 % and higher than 1.5 %. This
drops approx. 350 usage profiles and finally removes
such ones, which include recharging tasks. These
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
450
20k 40k 60k 80k 100k 120k
0
20
40
Distance in m
Relative Error in %
Figure 5: Average relative error per distance with finally
configurated CommonMiddling splitting strategy.
cannot be validated.
Making use of the splitting strategy Uniformly
(see Section 4.1 for an overview of strategies) results
in an average error of 197 %. The more distance a
usage profile handles, the lower the error will be. Uti-
lizing middling strategy with acceleration and decel-
eration phase, called cycle, with 60 s, 30 s and 10 s
results in a slightly improved average error ranging
from 172 % to 51 %. However, these strategy indi-
cates better errors in particular distances as well as
much too low velocity values. Thus, we have used
the CommonMiddling strategy configured with 50 km
at 40
km
/h and everything further at 80
km
/h. The first
50km uses 5s cycles and the remaining distance uses
60s cycles. This strategy results in an average error of
68%. Further, analyses show hot spots in various dis-
tances. Thus, we optimized the configuration of our
CommonMiddling strategy with five states. They are
shown ascending in the following list. The resulting
average error is 5 % and is visualized in Fig. 5.
1 Up to 10 km at 25
km
/h with 5s cycles
2 Up to 30 km at 32
km
/h with 15s cycles
3 Up to 60 km at 70
km
/h with 45s cycles
4 Up to 90 km at 70
km
/h with 360 s cycles
5 Up to ∞km at 70
km
/h with 1000 s cycles
5.3 Usage Profile Rating
Finally, after validating consumption model and us-
age profile splitting, we like to take a closer look at the
usage profile of a dataset where we know that EV uses
it. Fig. 6 visualizes the same dataset as used in Sec-
tion 5.2 splitted according to used vehicles. The final
rating is done as introduced in Section 3. This valida-
tion intends to check if this data produces ratings at
nearly 100 %. The figure shows that the implemented
simulation system creates a rating of an already sub-
stituted EV at an average of 97.4 %.
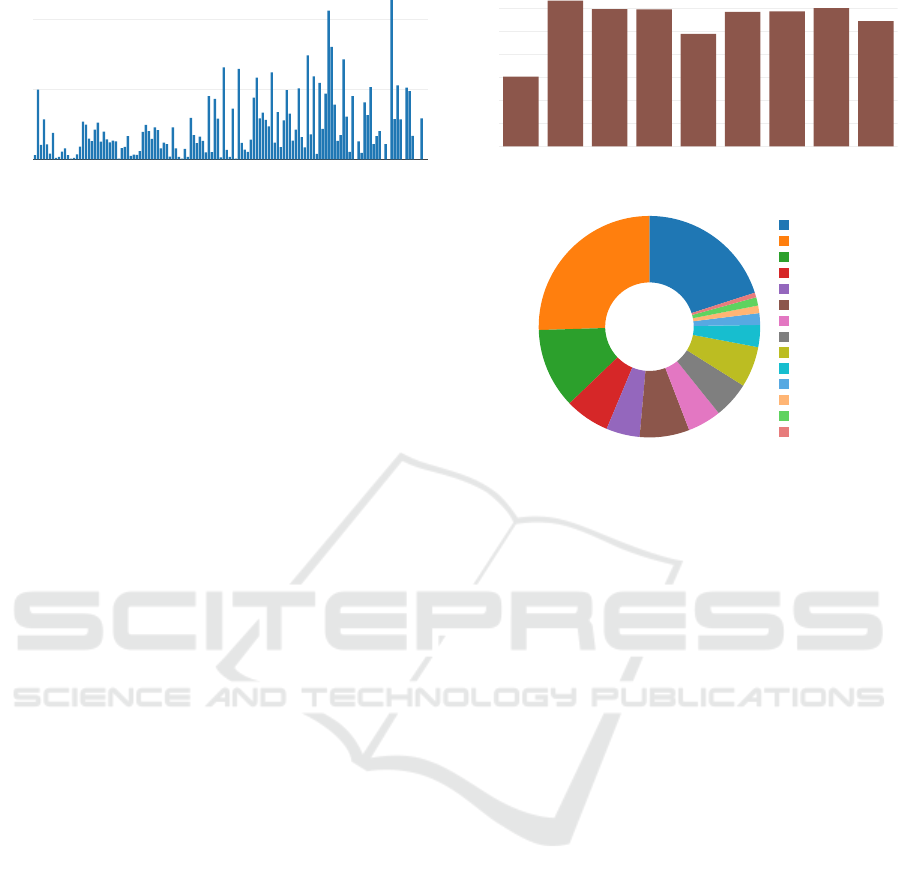
Car#1 Car#2 Car#3 Car#4 Car#5 Car#6 Car#7 Car#8 Car#9
81
84
87
90
93
96
99
Suitability in %
Figure 6: Usage profile rating of an EV.
20%
25.5%
11.7%
6.51%
4.9%
7.26%
4.91%
5.32%
5.95%
3.22%
10
20
30
40
50
75
100
150
200
300
400
500
1000
other
Figure 7: Grouped distances of usage profiles of combus-
tion vehicles (20 % is smallest category 10, other categories
anti-clockwise).
6 EVALUATION
After showing the usefulness of our model, we want
to consider some more vehicles. The usage data of
conventional combustion vehicles of a car sharing ser-
vice were used to create usage profiles. Our aim is to
show, which of these profiles could be handled by an
EV. First, we take a look at the usage profiles of the
combustion vehicles.
As you can see in Fig. 7 the distances mentioned
above of EV bookings are applicable for conventional
cars too. There is an amount of approx. 18 % of tracks
that are longer than 100 km. So, we expected a good
rating result for the EVs during our research. The us-
ages of them and conventional vehicles are similar in
general.
We used the formerly mentioned rating index
(Section 3) to evaluate the possibility of replacing
combustion vehicles with EV. In Fig. 8 you can see
the rating index in percent for various EV. The rating
is calculated for many combustion vehicles (1 to 49).
The indexes 21 to 27 show a low suitability value.
This might be caused by many long-distance tracks,
which had to be handled by the cars. In contrast, the
vehicle index 35 shows a high rating of 95%. This car
could have been replaced by an EV, i. e. there were
many shorter tracks to drive. An interesting case can
be found referring to car 36. We can see, that some
EV got a rating of approx. 50%, some others of ap-
prox. 90%.
Usage Profile Rating of Suitability to E-Vehicles Utilizing a Physical Consumption Model
451

Kangoo Z.E.
e-NV200
i3 (94 Ah)
e-up!
ZOE 22
e-Golf
i3 (60 Ah)
ZOE 41
fortwo elect. drive
i-MiEV
Car#1
Car#2
Car#3
Car#4
Car#5
Car#6
Car#7
Car#8
Car#9
Car#10
Car#11
Car#12
Car#13
Car#14
Car#15
Car#16
Car#17
Car#18
Car#19
Car#20
Car#21
Car#22
Car#23
Car#24
Car#25
Car#26
Car#27
Car#28
Car#29
Car#30
Car#31
Car#32
Car#33
Car#34
Car#35
Car#36
Car#37
Car#38
Car#39
Car#40
Car#41
Car#42
Car#43
Car#44
Car#45
Car#46
Car#47
Car#48
Car#49
0
20
40
60
80
100
Suitability in %
Figure 8: Suitability factor for various EV.
All in all, we can state, that over 50 % of the
tracks driven by conventional vehicles could have
been driven by EV too. There are some distances
electric driven cars cannot handle, but it depends on
the type of EV. The capacity of the accumulator may
be a primary factor. The ZOE 41 has got the accumu-
lator with the highest capacity and reaches the best
suitability values (Fig. 8).
7 DISCUSSION
Even if we got simulated energy consumptions
matching measurement values (Fig. 3 and Fig. 6),
there are some problems although. We used the
NEDC to get RDFs for our considered EVs. At this
point, we are simulating the consumptions within the
car, not the energy we have to recharge after driving
the tasks of the cycle. This way of proceeding results
in systematic errors, which impact all the following
steps. The process of measurement of the NEDC does
not happen within the car; it only evaluates supplied
electric energy.
Another problem is caused by the external influ-
ences of a driving task. At now, we do not consider
weather conditions like rain or wind. Watching these
factors, we get higher energy consumptions if there is
a headwind or if we have to use the wipers. Especially
the lights of the car are not only turned on during the
nighttime period. The modelling of the recuperation
while driving uphill or downhill is not easy because
we would have to know if the EV is recuperating or
not. But this often depends on the state of the throttle
pedal, not the velocity of the car or other macroscopic
measurement values.
The aforementioned sources of errors refer to vari-
ous driven tracks. The longer the distance a car drives,
the harder it gets to model recharging and driving. On
short tracks, there are not that many possibilities of
taking breaks for recharging. The behaviour of the
driver is tough to estimate, referring to configurated
breaks and accelerations. While working, we found
tracks of equal length which were driven by a specific
energy amount and the half of this value. Guessing
the energy economy causes errors.
A very system specific problem lies in the “Com-
monMiddling” (section 4.1). We got the strategy in
Section 5.2 by try and error. It was calibrated using
a vehicle type with about 4.000 usages. But we are
not sure if this strategy is vehicle-specific or a more
generic approach. The values reflect a plausible driver
behaviour, but we were not able to check them against
other vehicle models. Out of that, we did not con-
sider recharging during a driving task. Our model
only recharges between two tasks. The long-distance
tracks are not well evaluated in this way. Such tasks
need recharging by the driver, and so they get under-
valued.
As mentioned before, there are problems of mod-
elling driving uphill or downhill. The reached error
level will be hard to underbid. If we correct the model
referring to higher gradients, we get worse results for
lower ones. The physical model forces us to keep
the physical plausibility, i. e. adding correction terms,
maybe depending on time, must have a physical justi-
fication.
Although, we reach a high precision level, espe-
cially if we think of the non-existent, precise track
data for each considered vehicle.
8 CONCLUSION
Our approach aimed to decide if an EV could have
overcome the usage profile of a vehicle with a com-
bustion engine. We used a physical energy model
to describe the electricity consumption of EVs. Fur-
thermore, a model for splitting up usages into driv-
ing tasks was used to guess the behaviour of a driver
(driving and charging tasks) on a specific track. Fi-
nally, we simulated the driving of EVs on them and
calculated a rating that represents the possibility of
replacing the formerly used combustion vehicle by an
EV.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
452

We were able to show the possible precision of a
physical model in combination with a clever-guessed
user behaviour. Within the i-MiEV validation, a limit
has been reached at least if we think of the poor data
input we used. The physical model is configurable but
needs an RDFs in the end. To overcome this problem,
additional energy consumptions must be added like
lights or air conditioning system. Furthermore, other
measurements should be done so that further energy
terms can be added. Out of that, the specific consump-
tion behaviour depending on temperature and gradient
is needed. These measurements should take place for
every considered EV.
Referring to the aforementioned additional mea-
surements we have to think of the model in general.
Maybe we should not use a physical model reflecting
energies. Another way could be the use of average
consumption depending on manufacturer given val-
ues. With a more significant amount of data, an artifi-
cial intelligence could be used as well. Further, an ad-
vantage would be the more precise knowledge of the
behaviour of drivers. Especially people frequently us-
ing EVs are experienced in a recuperation-enhancing
driving tactic.
However, that was not the primary question within
this approach. As shown, it seems to be possible to
rate usage profiles by utilizing a physical consump-
tion model. Such methods have to take into consid-
eration an average relative error of approx. 10% of
the physical consumption model itself, which might
be optimized by adding more accurate measurement
data, as well as an error of approx. 5 % when guess-
ing driving tasks within our splitting component. This
application example shows that 90 % usages at some
station might be handled with electric vehicles, while
others should not be replaced.
ACKNOWLEDGEMENTS
The research project WINNER is funded by the Fed-
eral Ministry for Economic Affairs and Energy of
Germany under project number 01ME16002D. We
would like to thank especially the Mobility Center
GmbH for the provision of anonymised booking data.
REFERENCES
Bundesministerium f
¨
ur Bildung und Forschung
(2013). Elektromobilit
¨
at - das Auto neu denken.
https://www.bmbf.de/pub/Elektromobiltaet das Auto
neu denken.pdf; 2017-11-30.
Cedric De Cauwer, Joeri Van Mierlo, T. C. (2015). Energy
consumption prediction for electric vehicles based on
real-world data.
Charkhgard, M. and Farrokhi, M. (2010). State-of-charge
estimation for lithium-ion batteries using neural net-
works and ekf. IEEE TRANSACTIONS ON INDUS-
TRIAL ELECTRONICS, 57(12).
Chemnitzer Siedlungsgemeinschaft eG (2017). WINNER-
Projekt. http://www.winner-projekt.de; 2018-02-01.
Ferreira, J. C., Monteiro, V., and Afonso, J. L. (2013). Dy-
namic range prediction for an electric vehicle. In
2013 World Electric Vehicle Symposium and Exhibi-
tion (EVS27), pages 1–11.
Fetene, G. M. (2014). A report on energy consumption and
range of battery electric vehicles based on real-world
driving data. Technical report, Technical University
of Denmark.
Gebhardt, K., Schau, V., and Rossak, W. (2015). Applying
stochastic methods for range prediction in e-mobility.
In Innovations for Community Services (I4CS), 2015
15th International Conference on, pages 1–4.
Google (2017). Elevation api.
https://developers.google.com/maps/documentation/
elevation/intro?hl=en; 2017-11-28.
Hertrampf, F., Apel, S., Sp
¨
athe, S., and Rossak, W.
(2018). Modelling electric vehicle consumption - a
physical approach for the i-miev. Technical Report
Math/Inf/01/18, Friedrich Schiller University.
Kretzschmar, J., Geyer, F., Sp
¨
athe, S., and Rossak,
W. (2013). eTelematik: Prognose und
Ausf
¨
uhrungs
¨
uberwachung elektrifizierter kom-
munaler Nutzfahrzeuge. In Schau, V., Eichler, G., and
Roth, J., editors, 10. GI/KuVS-Fachgespr
¨
ach ”Orts-
bezogene Anwendungen und Dienste”, number 10,
pages 101–108, Jena, Germany. Logos Verlag.
Nations, U. (1995). Concerning the adoption of uniform
technical prescriptions for wheeled vehicles, equip-
ment and parts which can be fitted and/or be used
on wheeled vehicles and the conditions for reciprocal
recognition of approvals granted on the basis of these
prescriptions.
Rami Abousleiman, O. R. (2015). Energy consumption
model of an electric vehicle.
Schreiber, V., Wodtke, A., and Augsburg, K. (2014). Range
prediction of electric vehicles. In Shaping the future
by engineering : 58th IWK, Ilmenau Scientific Collo-
quium.
Verband der Automobilindustrie (2017).
New european driving cycle.
https://www.vda.de/en/topics/environment-and-
climate/exhaust-emissions/emissions-measurement;
2017-11-16.
Zhang, R. and Yao, E. (2015). Electric vehicles energy con-
sumption estimation with real driving condition data.
Transportation Research Part D: Transport and Envi-
ronment, 41:177 – 187.
Usage Profile Rating of Suitability to E-Vehicles Utilizing a Physical Consumption Model
453
