
Analysis of the GNSS Error Distribution
for the Generation of a Cooperative Environment Model
for Advanced Driver Assistance Systems
Florian Alexander Schiegg
1,2
, Tobias Frye
1,2
and Florian Wildschütte
2
1
Institute of Communications Technology, Leibniz University of Hannover, Appelstraße 9A, Hannover, Germany
2
Robert Bosch GmbH, Corporate Research, Robert-Bosch-Strasse 200, Hildesheim, Germany
Keywords: GNSS-Positioning, Localization Accuracy, V2x-Communication, Congestion Control.
Abstract: In the context of rising traffic automation, the generation of a reliable environmental model plays a key role.
By sharing their information, vehicles and infrastructure are able to set up cooperative environmental models
of considerably increased accuracy. The GNSS-based localization receives special attention in this regard,
since it allows switching from vehicle relative coordinates to absolute and vice versa. While the focus of most
related work lies on improving the mean of the GNSS fix, the work at hand analyses its error distribution.
Field tests were performed on various scenarios and compared with simulations. Finally, a utility function is
proposed, revealing the amount of information carried by every description parameter of the respective
distribution.
1 INTRODUCTION
The ongoing trend towards automation on the streets
has come along with the need for increasingly
accurate environmental models. In this context
vehicle to infrastructure (V2I) and vehicle to vehicle
(V2V) communication have received growing
interest in the past years. They allow to improve the
environmental model obtained from the vehicles’
own on-board sensors by fusing it with data from the
incoming V2X-messages.
Sensor measurements, however, are faulty and
every object’s state is associated with a certain error
distribution. Fusion algorithms, like the Kalman
filter, heavily rely on an accurate estimation of these
errors to weight the data of the different sensors. Also,
the association of a measurement to a specific object
within the environmental model is done based on the
estimation of its associated error.
The GNSS localization receives special attention
in the V2X context, since the information shared has
to be transformed from the emitting vehicle’s relative
coordinates to absolute and later back to the receiving
vehicle’s coordinates. Hence, due to error
propagation, all transmitted data is subject not only to
the underlying sensors’ intrinsic precision, but also to
the absolute localization errors of both vehicles. An
exact estimation of the GNSS positioning error is thus
of utmost importance.
In this work, different error estimations of the
GNSS-based localization are compared. Based on
these results, a utility function for the information
content of every additional description parameter is
set up, and the plausibility of the results is finally
investigated by means of Monte Carlo simulations.
2 STATE OF THE ART
While there are a vast variety of proposed localization
methods, the literature aimed at the estimation of its
accuracy is considerably scarcer. Pullen, Walter, and
Enge (2011) address the need for adapting existing
integrity concepts from specific risk (e.g. aviation) to
average risk applications (e.g. train and automotive).
Since most receivers only write out specific sentences
of the NMEA 183 standard defined by the National
Marine Electronics Association (2008), a generic
approach is needed to estimate the localizations error
distribution (e.g., Cosmen-Schortmann et al., 2008;
Mahdia et al., 2015). For its applicability in the
automotive sector, the estimation has to be feasible in
real time (e.g., Streiter et al., 2012 & 2013; Margaria
& Faletti, 2014; Mahdia et al., 2015). It would further
Schiegg, F., Frye, T. and Wildschütte, F.
Analysis of the GNSS Error Distribution for the Generation of a Cooperative Environment Model for Advanced Driver Assistance Systems.
DOI: 10.5220/0006793805450551
In Proceedings of the 4th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2018), pages 545-551
ISBN: 978-989-758-293-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
545
be desirable to take into account shape-information
about the error distribution comprised by the satellite
constellation (e.g., Kaplan, 2005; Margaria and
Faletti, 2014). This work attempts to cope with these
issues simultaneously.
3 METHODOLOGY
This section describes the methods employed
throughout this work. Section 3.1 briefly introduces
the employed mathematical models and the
evaluation of the results. The data collection is then
described in section 3.2.
3.1 Theoretical Background
3.1.1 Horizontal Dilution of Precision
As mentioned previously, the constellation of the
satellites used for the localization contains
information concerning the shape of the positioning-
error. The error vector can be written as (Kaplan,
2005):
=H
(1)
where represents the pseudorange error and
H=
1
1
1
,,,
2,2,2,
1,1,1,
kzkykx
zyx
zyx
uuu
uuu
uuu
(2)
is a matrix composed of the satellite positions relative
to the GNSS receiver
,
,
,
=
sin
(
)
cos(
)
cos
(
)
cos(
)
sin(
)
(3)
and
are the azymuth and elevation of the k-
th satellite respectively. The covariance can then be
obtained from the expected value of the error vector:
(
)
=E
(4)
By introducing Eq. 1 into Eq. 4 one then obtains
(
)
=E
(
H
H
)
=H
H
()=
(
H
H
)
(5)
In the second step
(
)
=
was assumed to
be constant. This approach assumes a multivariate
Gaussian distribution of the error vectors and is often
utilized in literature for its good results and
simplicity.
is the so-called user equivalent
range error that describes the error contributions from
the ionosphere, troposphere, multipath propagation,
receiver noise, clock and ephemeris, and usually takes
values between 0.5m and 10m depending on the
quality indicator of the used receiver. A deeper
treatment is offered by Kaplan (2005). While the user
equivalent range error is a mere factor, the matrix
D=
(
H
H
)
=
44434241
34333231
24232221
14131211
DDDD
DDDD
DDDD
DDDD
(6)
contains the information about the errors shape. It is
called the dilution of precision (DOP) matrix.
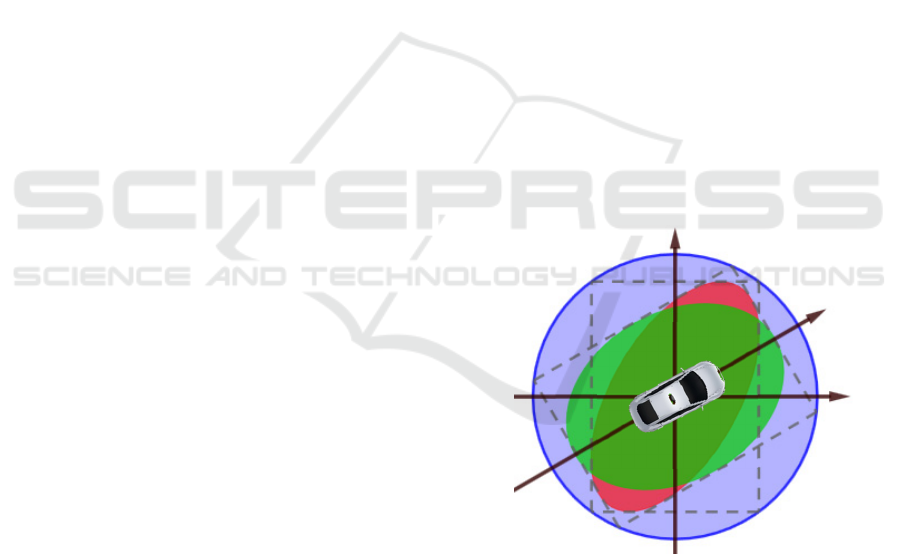
3.1.2 Error Morphologies
The upper left 2x2 part of the DOP matrix contains
all relevant information about the 2D localization
error. For symmetry reasons, it consists of only three
independent parameters. By simple math it is possible
to obtain the characteristic ellipse-shaped confidence
intervals of the bivariate-Gauss-distribution (red area
in Fig 1).
Figure 1: Error estimation morphologies.
In some cases, the system can be satisfactorily
described by two parameters. For instance, for some
applications only the error parallel and perpendicular
to the driving direction C is of interest. This is usually
the case when the GNSS data stays on-board and is
not transmitted to the surrounding V2X-capable
traffic objects. The DOP matrix is then transformed
to the ego-coordinate system of the GNSS receiver
and the resulting correlation terms are set to zero,
N
E
C
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
546

resulting in an ellipse aligned with the driving
direction (green area in Fig. 1).
For terrestrial applications, often only one
parameter, the so-called horizontal dilution of
precision (HDOP) is considered (Betz, 2016). It can
be computed as
=
+
(7)
Multiplied by the UERE, it gives an estimation of the
radius of a circle-shaped error distribution (blue area
in Fig. 1).
For simplicity’s sake the introduced error
distributions will further be referred to by the number
of their description parameters (e.g. the circle would
be called the 1 parameter ellipse (1PE)).
3.1.3 Evaluation
To obtain a sufficiently accurate environmental
model it is crucial to know which error estimate is
most suitable for each scenario. Further, it would be
desirable to determine how much information is
carried by each supplementary description parameter
to provide some sort of utility function and herewith
allow a case specific evaluation of the parameters to
be transmitted.
In order to make the error distributions
comparable it has to be made sure they all represent
the same confidence interval. For three main reasons
the empirical UEREs supplied by literature are
insufficient in this regard: (i) The UEREs vary
significantly between different sources, (ii) the
elimination of the correlation terms and the resulting
diverging areas of the different error estimations
imply modified confidence intervals, and (iii) the
localization error is sensitively dependent on the
algorithms and hardware employed by each GNSS
receiver.
Hence, the UERE must be adjusted for each
distribution in a way that it correctly predicts an equal
number of measurements. This done, the estimations
can finally be compared based on the proportion of
estimations they do best and the average area
necessary to meet the described normalization
requirements. The latter is particularly important
since it yields the accuracy of a model in form of its
resolution.
3.1.4 Monte Carlo Simulations
Assuming the error distribution is completely random
and thus uncorrelated to the inclination angle of the
3PE, then statistically 50% of the measurements
would lie up to 45° away from its major axis. In other
words, in half of the cases the ellipse would describe
the error more precisely than the circle. On the other
side, should the error distribution be perfectly
described by the covariance matrix, then the amount
of situations the 3PE predicts the error in a better way
depends on its deformation. Fig. 2 shows an ellipse
with deformations a) =1.3 and b) =2.0
representing a random confidence interval of the error
distribution. It is superposed by a circle of the same
area and thus, resolution. Measurements located on
the illustrated straight lines through the intersections
of circle and ellipse will thus be equally well
predicted by both geometries with equal resolution.
On these lines, the Mahalanobis-distances of both
models would also be alike. It can be noted that the
Mahalanobis-distance of a 3PE is smaller in the red
area than that of the 1PE and vice-versa for the blue
area.
Figure 2: Region where the 1PE (blue) and the 3PE (red)
require lower UEREs to describe the error for an ellipse
deformation of a) =1.3 and b) =2.0 respectively.
Similar thoughts apply for the expected relative
resolution of the estimations and the 2PE. Making use
of Monte Carlo simulations it is hence possible to
numerically predict how well the investigated models
should describe the actual data, assuming either a
fully random distribution or one perfectly described
by the DOP matrix. Comparing these theoretical
values with the experimental results makes it possible
to draw conclusions on the nature of the real error
distribution.
3.2 Experimental Setup
Experiments were carried out to investigate the
performance of the proposed error estimates. To this
purpose a test vehicle equipped with an ADMA-g Pro
as ground truth reference was used to collect data on
over 100 km in different scenarios (urban,
countryside and highway). The measurements were
)=.
)=.
Analysis of the GNSS Error Distribution for the Generation of a Cooperative Environment Model for Advanced Driver Assistance Systems
547

performed with two different test receivers, namely
an Adafruit Ultimate GPS (MTK3339 chipset) and a
u-blox EVK-M8T (NEO/LEA-M8T chipset). For
further diversification SBAS was activated only on
the former. All in all, over 45000 localizations were
carried out (Table 1).
Table 1: Description of the investigated tracks.
Track Scenario Receiver Distance
1
Mixed Adafruit 10.9 km
2
Mixed Adafruit 5.2 km
3
Highway Adafruit 27.2 km
4
Mixed Adafruit 6.1 km
5
Highway Adafruit 39.1 km
6
Country Side u-blox 12.1 km
7
Mixed u-blox 9.2 km
8
Urban u-blox 3.3 km
4 RESULTS AND DISCUSSION
4.1 Data Characterization
A characterization of the measurements for both test
receivers and in distinct scenarios is provided in table
2. Interestingly the average horizontal error of the u-
blox presented significantly lower values than the
Adafruit with activated SBAS. Even in strongly
screened areas it was able to detect a larger amounts
of satellites, resulting in only moderately deformed
ellipses (~1.26).
It is worth noticing that the Adafruit lost
connection on a segment of the highway, yielding
either no fix or extremely high errors (Fig. 4b). Since
the overall average is of interest and this situation is
not uncommon, these points were not filtered out.
Further, the used test receivers employ internal
correction algorithms that lead to inertial effects on
the vertices of the trajectories, as can be seen in detail
in figure 3. The effect is also well visible in a larger
scale in figure 4a, were the best fitting error
estimation changes briefly after most of the vertices.
Since the vast majority of receivers employ internal
correction algorithms and their influence on the
results cancel out for sufficiently large amounts of
data, the fixes were taken without further
modifications.
4.2 Normalization
In a first step, the exact UERE was determined for
each error estimation (Fig. 3). This means that the
diameter of the geometries was chosen in a way that
the measured fix lies right on its border.
The lower row of figure 4 shows the error estimate
of highest resolution for every measurement. The
only best fitting estimate was amplified by a factor of
10 for better visualization. As can be noted, in all
scenarios the 3PE described the real error more
accurately (lower area) than 1PE and 2PE. It should
be kept in mind that only the portion of fixes best
described by each geometry is of interest in this case,
and not the area. Thus the colours may be a bit
misleading at first sight.
The amount of fixes where the 3PE presented a
lower area than the 3PE ranged from 52% in urban
areas to 78% on the highway. The obtained values are
shown on table 2.
However, since in practice the estimation has to
be made in real time, a fix UERE has to be determined
in advance. Fig. 5a and 5b show the number of
measurements correctly predicted by each
distribution as a function of the chosen UERE for the
Adafruit and the u-blox respectively. As can be seen,
the commonly used
%
ranging from 5.0 to
7.1 (Betz et al., 2016; Kaplan, 2005) would contain
only 70-86% of the Adafruit’s but 100% of the
Figure 3: A posteriori calculated exact UEREs for given reference (red) and measurement (blue). The arrows point into the
driving direction.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
548

u-blox’s measurements, confirming the necessity of
its readjustment to ensure comparability.
It is worth noticing that even though different
scenarios were analysed with each receiver, the
cumulative error distributions converge in the same
order for both (descending: 3PE, 2PE and 1PE).
4.3 Estimations Accuracies
Once the error estimations are normed to correctly
predict equal numbers of measurements, they can be
compared based on their resolution. As mentioned
before, the resolution of an estimation is proportional
to the inverse of its area. Table 2 summarizes the
mean areas relative to the one of the 3PE at a
confidence interval of 95% for the different scenarios.
As could be expected from the previous results, both
the 1PE and the 2PE require larger confidence
intervals than the 3PE in three of the four investigated
scenarios. Only in urban areas the 1PE seems to be
more accurate. However, by observing Fig. 6b the
large oscillations stand out. It shows the areas of each
distribution relative to that of the 3PE as a function of
the confidence interval estimated with the determined
fix UEREs. The oscillations are attributed to the size
of the analysed sample (as a reference, for the Monte
Carlo simulations to converge over 100 mio.,
simulated localizations were necessary). However,
despite these oscillations the considerably lower
relative performance of the 3PE is clearly visible.
Thus, in areas with higher building density the DOP-
matrix seems to lose validity. This effect may be
explained by multipath propagation on the
surrounding buildings, distorting the DOP matrix and
leading to a more random distribution.
When comparing Fig 6a and 6b, a second effect
can also be appreciated. Better receivers consider
more satellites for their calculations, reducing the
deformation of the ellipses, making them more
similar to circles and reducing the impact of
additional description parameters.
Table 2: Characterization of the collected data. In brackets the theoretical values obtained from Monte Carlo simulations.
Scenario Mixed Highway Urban Rural
GNSS Receiver
Adafruit Adafruit u-blox u-blox
Absolute Error [m]
2.82±1.70 5.19±8.41 1.59±0.65 0.91±0.18
Deformation =/ 1.37±0.11 1.36±0.24 1.26±0.12 1.15±0.09
<
(exact UERE)
0.67 (0.56) 0.78 (0.55) 0.52 (0.54)
0.66 (0.52)
Rel. Area
/
[95%]
1.26 (1.06) 1.21 (1.06) 0.96 (1.04) 1.09 (1.02)
Rel. Area
/
[95%]
1.17 (1.04) 1.04 (1.04) 1.00 (1.03) 1.06 (1.01)
Figure 4: Selection of tracks for the different scenarios (upper row) and best describing error geometry (lower row) for a-
posteriori computed exact UEREs (augmented by a factor of 10 for a better visualization).
)
)
)
)
Analysis of the GNSS Error Distribution for the Generation of a Cooperative Environment Model for Advanced Driver Assistance Systems
549

Figure 5: Cumulative error distributions of a) the Adafruit and b) the u-blox.
Figure 6: Relative mean area of the estimated confidence intervals, a) Adafruit, mixed and b) u-blox, urban.
With the obtained results it is then possible to
partially construct a utility function to estimate the
value of every additional parameter, depending on the
scenario. In strongly shaded regions multipath
randomly scatters the measured fixes of both
receivers, significantly reducing the validity of the
3PE-model. However, in mainly open surroundings
the 2PE was found to be in average 7% (2%) and the
3PE even up to 25% (8%) more accurate than the 1PE
for the Adafruit (u-blox). which is a fairly large
increase. In the ADAS-context an increase of this
magnitude in accuracy presents a considerable
improvement. Three key systems of highly automated
vehicles profit from a more precise estimation of the
localization error: (i) Association: To construct the
environmental model for the ADAS-system to base
its decisions on the objects detected by different
sensors have to be associated. In the case of a
cooperative environmental model, also the objects
transmitted via V2X-communication have to be
associated with those of the local environmental
model. A precise knowledge of the data’s accuracy is
essential. (ii) Sensor fusion: The data of an object
provided by different sensors is then fused, weighted
by the estimated accuracies. A better estimation of the
GNSS localization error thus leads to a better overall
localization after the data is fused with that of other
sensors. (iii) V2X-comunication: On-board sensors
employ a relative coordinate system. To share data
with other V2X-cappable vehicles, this data has thus
to be transformed to absolute coordinates in the
sending vehicle by means of its GNSS-fix and its
accuracy. The receiving vehicle then has to transform
it back to its own coordinate system, making use
again of its absolute position and associated error
estimation. A bad GNSS-error estimation will thus
have a large negative impact on the transmitted sensor
data.
This in mind, the performance increase provided
by the 3PE with respect to the 1PE is thus
considerable. However, it should be noted that the
obtained values have to be taken with the appropriate
caution. As the results showed, the utility function is
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
550

receiver specific and depends significantly on its
quality.
4.4 Comparison with Simulations
Comparing these observations with the theoretical
values determined by Monte Carlo simulations (listed
in brackets in table 2) shows that in urban areas the
real error distribution lies somewhere between that of
a fully random distribution (ratio 50%) and that of the
covariance matrix (ratio 54%).
Figure 7: Dependence of the predictions performances on
the distributions deformation (Monte Carlo simulations).
All other scenarios lie well above the theoretical
value, proving that the covariance matrix is not only
strongly correlated to the real error distribution in
open sky areas, but also that higher axis ratios would
describe it better with the same inclination angles,
hinting systematic errors. Since this behaviour
occurred equally for varying experimental conditions
(e.g. speed, driving direction, satellite constellations,
daytime, etc.) it can most probably be traced back to
the receivers themselves. Many receivers rely on the
weighted least squares method, which weights the
used satellites independently. In single-frequency
SPS receivers the pseudorange error measurements,
dominated by ionospheric effects, can be
approximated by the satellites’ elevations (Kaplan,
2005, 332). This results in higher deformations of the
error distriutions. The same conclusions apply to the
relative resolution of the analysed error estimations.
5 CONCLUSION
The main purpose of this work was to compare
different error distributions of the GNSS localization
derived from the satellite constellation. Field tests
were performed in characteristic scenarios, at varying
conditions, daytimes, and test receivers. It could be
shown that while shadowing has a positive effect on
the distributions’ eccentricity and thus on the 3PEs
relative accuracy, multipath propagation leads to the
opposite result. The latter could be attributed to the
distortion of the DOP matrix due to satellites
erroneously taken into account. In open sky areas
however, the 3PE estimation proved to perform
considerably better than the simplified error
distributions. Furthermore, the magnitude of this
effect seemed to be correlated to the used test
receiver. Cheaper receivers incorporate fewer
satellites into their fixes, yielding more deformed
error distributions. The gain of accuracy per
transmitted parameter is thus notably higher than in
expensive super accurate receivers. Simulations
supported the experimental results; nevertheless,
further research is highly encouraged.
REFERENCES
Betz John W., 2016. Engineering satellite based navigation
and timing: Global Navigation Satellite Systems, Signals,
and Receivers. Wiley-IEEE Press.
Cosmen-Schortmann, J., Azaola-Sáenz, M., Martínez-
Olagüe, M., & Toledo-López, M., 2008. Integrity in
Urban and Road Environments and its use in Liability
Critical Applications. IEEE/ION Position, Location and
Navigation Symposium.
Kaplan Elliott D., 2005, Understanding GPS: Principles and
Applications. Artech House Publishers, London, 2
nd
edition.
Margaria Davide and Faletti Emanuela, 2014. A novel local
integrity concept for GNSS receivers in urban vehicular
contexts. IEEE/ION Position, Location and Navigation
Symposium.
National Marine Electronics Association (NMEA), 2008,
NMEA 0183 Standard, viewed 1 December 2017,
http://www.nmea.org/
Pullen Sam, Walter Todd, and Enge Per, 2011. SBAS and
GBAS Integrity for Non-Aviation Users: Moving Away
from Specific Risk. International Technical Meeting of
the Satellite Division of the Institute of Navigation.
Streiter Robin, Bauer Sven, Bauer Stefan, and Wanielik
Gerd, 2013. GNSS Correction Services for ITS
Applications: A performance Analysis of EGNOS and
IGS. IEEE Intelligent Transportation Systems.
Streiter Robin, Bauer Sven, Bauer Stefan, and Wanielik
Gerd, 2012. GNSS Multi Receiver Fusion and Low Cost
DGPS for Cooperative ITS and V2X Applications. 9th
ITS Europe Congress.
Tahsin Mahdia, Sultana Sunjida, Reza Tasmia, and Hossam-
E-Haider Md, 2015. Analysis of DOP and its Preciseness
in GNSS Position Estimation. Electrical Engineering
and Information Communication Technology.
Analysis of the GNSS Error Distribution for the Generation of a Cooperative Environment Model for Advanced Driver Assistance Systems
551
