
Flexible Multicriterial Agenda Planning in Public Transit Systems
An Intelligent Agent for Mobility-oriented Agenda Planning
Felix Schwinger
1
, Fabian Ohler
1
and Karl-Heinz Krempels
1,2
1
Fraunhofer Institute for Applied Information Technology FIT, Aachen, Germany
2
Information Systems, RWTH Aachen University, Aachen, Germany
Keywords:
Agenda Planning, Information System, Intelligent Agent, Mobility Planning, Operations Research, Optimiza-
tion Problem, Orienteering Problem, Public Transportation, Travel Planning.
Abstract:
Planning a mobility-oriented agenda is a time-consuming and tedious task for many travelers. A person is
required to collect information from different sources such as a map service, a business register, a calendar and
a journey planner. However, she is mostly not interested in either planning the agenda or the journeys between
different locations of the agenda; but is more interested in completing the tasks of the agenda. Therefore, we
propose an intelligent agenda planning agent that aims to support people with this task. We integrate public
transit schedules with additional spatial information from OpenStreetMap to create an information database
for the agent. The agent can then plan tasks and appointments and the mobility between those items. First
brief evaluations with a survey have shown, that the algorithm finds shorter agendas than most manually found
agendas. However, participants of the survey criticized the temporal placement of tasks in the agenda.
1 INTRODUCTION
Urban transportation systems are often large, com-
plicated to use for the first time and when regarding
multimodal transportation systems, also difficult to uti-
lize effectively (Zografos and Androutsopoulos, 2008).
In recent years, there has been a surge of new infor-
mation systems that provide useful information for
passengers of public transit systems. The developed
information resources include map services, business
directories, and online route planners which try to de-
crease the usage complexity of urban transportation
systems. A user can resort to these services when
planning her agenda; however, the main problem with
these services is that they do not provide an easy to
understand, integrated solution to the whole problem
of mobility agenda planning, and only offer segmented
information (Baena-Toquero et al., 2014). A mobility
agenda does not only include the agenda items, i. e.,
appointments and tasks, but also the mobility between
the different locations of the agenda. The user, there-
fore, needs access to multiple services when planning
her agenda: She could check nearby locations on a
map service, then inquire their opening times in a busi-
ness directory and finally plan the journeys between
the locations with a route planner. Additionally, she
might check different journey planners for different
types of mobility, i. e., car-sharing, walking or pub-
lic transportation. A user might, however, not even
be interested in manually planning her agenda, but is
more interested in an agenda that allows her to per-
form all tasks she wants to complete on a day. An inte-
grated intelligent system that allows the user to specify
her needs, which then calculates an optimal mobility
agenda that fits the passenger’s schedule would help
to drastically reduce the complexity. This paper intro-
duces an algorithm for computing intra-city itineraries
that focuses on public transportation systems.
The remainder of this paper is structured as fol-
lows: In Section 2, we propose the Mobility Agenda
Planning Problem and in Section 3, the related work
is introduced and discussed. Section 4 introduces a
model for mobility-oriented agenda planning and Sec-
tion 5 describes an algorithm for it. We show first brief
results of a performed survey in Section 6 and finally
conclude the paper with an outlook and a summary in
Section 7.
2 PROBLEM DESCRIPTION
In this paper, we regard the Mobility Agenda Planning
Problem (MAPP) as follows: The input for the prob-
558
Schwinger, F., Ohler, F. and Krempels, K.
Flexible Multicr iterial Agenda Planning in Public Transit Systems.
DOI: 10.5220/0006795305580567
In Proceedings of the 4th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2018), pages 558-567
ISBN: 978-989-758-293-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

lem is a number of appointments and tasks. Appoint-
ments are entirely fixed, whereas tasks are movable
in at least one dimension, i. e., temporally or spatially.
Each insertable agenda item has an associated score
and a completion time. The score of the agenda item
may represent the priority of the task to the person,
or a combined score of various factors. The goal of
a MAPP algorithm is to find an optimized mobility
agenda, containing all appointments and a number of
tasks. Additionally, the algorithm computes the mobil-
ity between all locations in the agenda. In this paper,
we focus on walking and public transportation jour-
neys between agenda items. The task for the problem
is then to optimize the mobility agenda by maximiz-
ing the score of the agenda while minimizing the total
time it takes to complete the agenda. The total time
includes possible wait times at public transit stations,
wait times at Points of Interest (POIs), travel times be-
tween different locations, and the completion time for
agenda items. All appointments have to be reached on
time, and all public transit transfers must be feasible.
Furthermore, the algorithm has to consider category
or location constraints for agenda items and potential
dependencies between agenda items. Each location,
therefore, also has an associated category, so that the
agent can determine suitable locations for tasks. It
should also be possible to define dependencies be-
tween agenda items so that one agenda item can only
be inserted into the agenda, if another agenda item
has been completed before it. To compute mobility-
oriented agendas, the algorithm needs to optimize the
spatial placement of tasks and their sequence. To this
end, the algorithm needs to know the location of POIs
including their category and be able to generate routes
in a road network, as well as in a public transit net-
work. The agent can then compute a mobility itinerary,
containing a list of agenda items and a travel plan on
how to reach the different location either by walking,
by public transit, or by a combination of both travel
modes.
This work aims to investigate whether it is possible
to create an intelligent agent to support people in the
agenda planning process and combine the process with
mobility planning in a real-life setting.
3 RELATED WORK
Not much research has been conducted on general
mobility-oriented agenda planning. The research on
combining mobility and agenda planning also incor-
porating public transportation has, to the best of our
knowledge, only recently started. Other optimization
problems such as the Tourist Trip Design Problem
(Vansteenwegen and Van Oudheusden, 2007) are, how-
ever, a specialization of the Mobility-Agenda Planning
Problem, which focuses on tourist agendas.
3.1 Model of Mobility Agenda Planning
A model for mobility agenda planning has been pro-
posed by (Wienken et al., 2014; Wienken et al., 2017).
The authors discuss the possibility of combining mobil-
ity planning and agenda planning. This integration is
possible due to a large similarity between both aspects.
Table 1: Similarity between information needs for agenda
planning and mobility planning. (Wienken et al., 2014)
Information need of
Agenda planning Mobility planning
Purpose Location
Date/Time Date/Time
Location Sequence of mobility
Sequence Means of transportation
Social Mobility impairments
Table 1 shows the identified information needs.
The table indicates that both agenda items and mo-
bility elements share some information needs such as
the location and the time. A mobility agenda con-
sists of agenda items and the mobility between the
different agenda items. An agenda item has a purpose
which determines whether it is a task or an appoint-
ment. The problem for the mobility agenda planning
agent is to compute a mobility-oriented agenda that
allows the user to be on time to all her appointments
while performing an optimal number of tasks at their
respective locations. Between the agenda items, the
mobility agenda planner should also plan the mobility
with different choices of transportation. The algorithm
may tailor the selection of transportation and agenda
items to a specific user profile, respecting the user’s
preferences.
As an example, a user gives the agenda planner
a list of fixed appointments on that day and a list of
tasks she wants to perform that day. The function of
the mobility agenda planner is then to find a suitable
location for the tasks if a location for the task is not
specified. The mobility agenda planner should choose
places in such a way that the resulting mobility agenda
is optimal to the user, for example, as short as possible,
while still allowing for the completion of all tasks.
3.2 Relevant Optimization Problems
In the literature, we have not found optimization prob-
lems that deal with computing mobility-oriented agen-
das in a general way, but we have found several more
Flexible Multicriterial Agenda Planning in Public Transit Systems
559

specialized problems that can be generalized and be
used as a basis for a mobility agenda planning algo-
rithm.
Tourist Trip Design Problem.
The MAPP is a gen-
eralization of the Tourist Trip Design Problem (TTDP)
(Vansteenwegen and Van Oudheusden, 2007). The
TTDP is a route planning problem that focuses on
tourists, which want to visit multiple POIs in a city.
The objective of the TTDP is to select a subset of POIs
that match the user’s profile and to maximize the user’s
satisfaction with the route. The authors suggested to
calculate the satisfaction of a user with various param-
eters and constraints such as the choice of POIs, the or-
der of the visits, the distance between POIs, the visiting
time for POIs, the opening hours of POIs and further
information such as entrance fees or weather condi-
tions. The main difference between the TTDP and the
MAPP is that the TTDP does not differentiate between
appointments and tasks. Furthermore, the TTDP does
not necessarily model dependencies between tasks and
mostly does not distinguish between various categories
of POIs. The mobility-oriented agenda planning agent
must place certain tasks of the user, i. e. buying bread,
at certain locations, such as a supermarket or a bakery,
which is why the algorithm needs to distinguish be-
tween different categories and must map the intent of
the user to certain POI categories. For a MAPP query
it should, furthermore, be possible to plan certain tasks
not before other tasks have been completed, e. g. visit
the pharmacy after visiting the doctor.
Orienteering Problem.
The TTDP has often been
modeled as an Orienteering Problem (OP) in the lit-
erature (Vansteenwegen and Van Oudheusden, 2007).
The OP, also known as the Selective Traveling Sales-
man Problem, can be seen as a combination of the
Traveling Salesman Problem (TSP) and the Knapsack
Problem (KP). In the OP we have a graph with vertices
and arcs. The vertices represent POIs, while the arcs
represent the travel time between POIs. Each vertex
is annotated with a score and a visiting time, and each
arc is annotated with a travel time. The task of the
OP is to compute a path visiting a certain subset of
vertices in such a way, that the aggregated score of the
vertices is maximized. The path is constrained by the
time budget and the visiting times of the vertices added
to the travel times on the arcs is not allowed to exceed
the time budget. Furthermore, the score of each vertex
is only allowed to be collected once. (Golden et al.,
1987) have proven that the OP is NP-hard. Hence, it is
infeasible to calculate exact results for larger problem
instances and heuristics need to be found to determine
quality solutions to the OP. Nearly all recent papers
published on the OP and its variations describe an
approximation algorithm for the problem.
More advanced approaches model the TTDP as
a Team Orienteering Problem with Time Windows
(TOPTW) (Boussier et al., 2007). The TOPTW is
an extension to the OP, where the task is not to find a
single route in the graph that maximizes the total score,
but
r
routes, which maximize the aggregated score of
all routes. Each route has a time budget and the score
of a route is the score of the route’s POIs. The score
of each vertex is only allowed to be collected once.
This extension of the OP was used to allow comput-
ing tourist trips spanning multiple days. Additionally,
the OP has been modified to support time windows
of vertices, so collecting the score of a vertex is only
possible, if it is visited during its time window. With
this extension, we can model the opening and closing
times of POIs in the TTDP.
Furthermore, our approach should integrate public
transportation as a means to travel. Later, we want to
extent this support to new mobility offers such as car-
or bike-sharing. Public transport, however, is schedule-
based and therefore the travel times from one location
to another are time-dependent. Depending on when a
person arrives at the bus station, the travel time may
differ. For dealing with time-dependency, the Time-
Dependent Team Orienteering Problem with Time Win-
dows (TDTOPTW) has been proposed. The problem
description itself is the same as for the TOPTW, but
the travel times on the arcs of the graph are now a
function, whose value depends on the time for which
it is traversed. Computing exact solutions, even for
small problem instances of the Time-Dependent Ori-
enteering Problem, is not feasible (Gunawan et al.,
2014). The problem was attempted to be solved with
the commercial Integer Problem (IP) solver CPLEX,
which was not able to compute exact solutions to small
problem instances in less than 24 hours. As interac-
tions with an intelligent agent should be possible in
nearly real-time, the runtime of the algorithm should
be limited to less than a few seconds, making exact
solutions not feasible for our use case.
For solving a TDTOPTW there are two main ap-
proaches discussed in the literature: The key idea
of the first approach is to reduce a TDTOPTW to a
TOPTW by assigning each arc in the graph the aver-
age travel time from one location to another (Garcia
et al., 2013). Removing the time-dependency from the
problem reduces its computational complexity. The
TOPTW is then solved with an Iterated Local Search
(ILS) algorithm. An ILS algorithm is a meta-heuristic
algorithm applicable to a wide range of optimization
problems (Louren
c¸
o et al., 2003). It operates in several
iterations and performs local search steps in each iter-
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
560
ation in an attempt to improve the best-found solution
so far. While this approach reduces the runtime of
the algorithm, the downside is that it may return infea-
sible mobility agendas, because it does not consider
the actual schedule of the public transit vehicles. To
handle these cases the authors in (Garcia et al., 2013)
implemented a repair procedure, which uses a time-
dependent route planner, to validate the solution. If an
error is found, it attempts to repair the created route
by removing visits from it.
The second approach also solves the TDTOPTW
with an ILS algorithm (Gavalas et al., 2015). The
key difference is, that this solution directly integrates
the time-dependency and the problem is not reduced
to a TOPTW, but is rather directly solved. The au-
thors improved the runtime of the algorithm by using
a clustering approach, which limits the search space of
the algorithm and therefore shortens its runtime. The
evaluation showed that this clustering heuristic only
minimally affects the solution’s quality, but greatly
improves the runtime, when compared to the default
ILS heuristic.
Finding Optimal Sequences.
Another aspect of
mobility agenda planning is to find optimal sequences
of POIs. For this, we have researched optimization
algorithms. The Trip Planning Query (Li et al., 2005),
Optimal Sequence Route (Sharifzadeh et al., 2008),
and Multi-Request Route Planning (Lu et al., 2017)
problems all deal with finding a sensible sequence for
visiting a number of POIs. They do, however, not in-
clude the functionality to reduce the requested POIs to
a subset, but rather plan an optimal route containing
all requested task, similar to the Traveling Salesman
Problem. This means that there is no notion of a time
budget, which the algorithm could consider. Addition-
ally, as there is no time budget, there is also no score
of the POIs, the algorithm rather minimizes the travel
time required for the route, but does not consider a kind
of score for the various POIs. Furthermore, these ap-
proaches are designed for road networks, meaning that
the travel times are assumed to be time-independent
and symmetric, which is both not the case for a public
transit network.
4 MODELING OF THE PROBLEM
We propose to model the MAPP as a TDTOPTW and
transform it the following way: As appointments are
entirely fixed an inflexible, we can construct a corre-
sponding TDTOPTW problem, where appointments
are already handled. A graphical illustration is shown
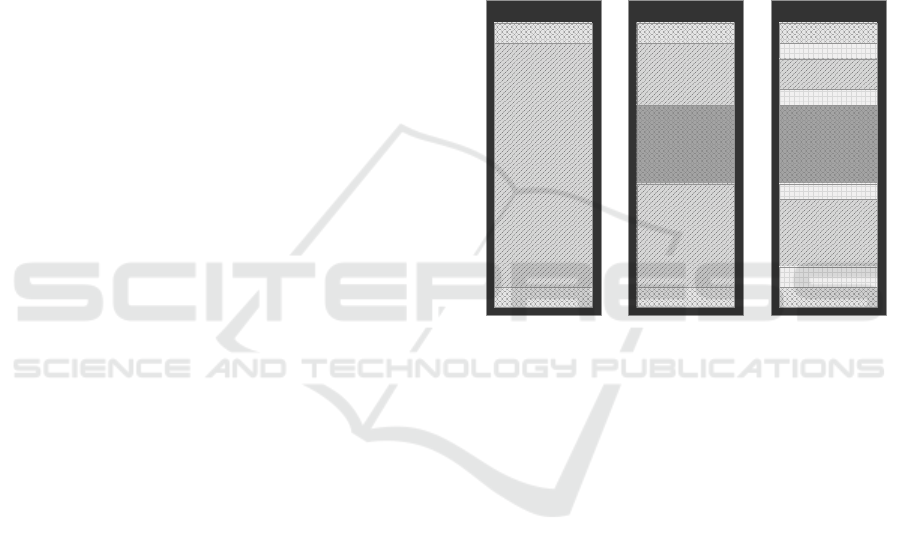
in Figure 1. Step
1
creates an empty solution with the
starting and ending location of the agenda with the re-
spective starting and ending times. In Step
2
we create
a new route for each appointment in the agenda. This
means, that we model the time of an appointment as
the time difference between two routes. This modeling
ensures, that the TDTOPTW algorithm respects the
time windows and locations of the appointments. For
example, the complete mobility agenda of a user starts
at 8:00, ends at 18:00, and there is an appointment
from 14:00 to 16:00. We model this problem as a TD-
TOPTW with two distinct routes: The first route
r
1
starts at 8:00 and ends at 14:00, whereas the second
routes r
2
starts at 16.00 and ends at 18:00.
Mobility Agenda
Start of the Agenda
End of the Agenda
Empty
(a) Step 1
Mobility Agenda
Start of the Agenda
End of the Agenda
Appointment
Route 1
Route 2
(b) Step 2
Mobility Agenda
Start of the Agenda
End of the Agenda
Appointment
Transit Time
Transit Time
Task 1
Transit Time
Task 2
Transit Time
(c) Step 3
Figure 1: Creation of a TDTOPTW instance from a MAPP
instance, consisting of two tasks and one appointment. The
corresponding TDTOPTW therefore consists of two routes.
The constructed problem ensures that the user is on
time to her appointment because route
r
1
ends at the
location of the appointment at the time of the appoint-
ment. For each appointment of the user, we therefore,
end a route, at the time when the appointment begins
and start a new route, for the time when the appoint-
ment ends. The respective ending and starting loca-
tions of the routes are the locations of the appointments.
As the CSCRoutes algorithm only inserts a task, if no
route time window is violated, the timely arrival at the
appointment location is guaranteed. After inserting the
appointments into the solution, the algorithm can start
to add tasks into the routes. The algorithm then has
two routes available to insert tasks into. The insertion
of tasks is performed in Step
3
. Step
3
is done with the
modified CSCRoutes algorithm, while Step
1
and
2
is
performed by a pre-processing algorithm constructing
the associated TDTOPTW problem. The CSCRoutes
algorithm is introduced in more detail in Section 5.2.
The modifications include the support of an order of
agenda items and category constraints on the POIs.
Flexible Multicriterial Agenda Planning in Public Transit Systems
561

We identified various other features that may be
important for an agenda planner to support such as:
Mutual exclusion of agenda items, deadlines, preferred
order of agenda items, mandatory POIs (not an appoint-
ment), time-dependent scores for POIs, multimodality,
and connection between agenda planners (i. e. plan a
task together with other people). Some of them can eas-
ily be integrated into our approach such as deadlines,
for example; while the integration of multimodality is
more complex.
Scoring of Agendas.
The main task of the agenda
planner is to help the user plan tasks on a specific day.
We have two ratings that are important for an agenda
plan, the score of the agenda, denoting the preference
to the user and the completion time of the agenda, i. e.,
the time it takes for the user to complete the agenda.
Both of these ratings have to be correlated and be used
for rating the agenda, otherwise unreasonable agendas
may be returned. We have decided to use a weighted
linear combination of the score of the agenda and the
completion time. The score of the individual agenda
tasks, however, must also be correlated to the time
taken to complete them, otherwise the agenda planner
may prefer low-scored short tasks over high-scored
long tasks. Furthermore, the score of the individual
agenda tasks is also an combined score consisting of
several factors such as the priority of the task, the
preference of the user and maybe further external in-
formation such as the weather forecast, for example.
A user may be more inclined to perform tasks outside,
for a nice day and prefer doing indoor activities on a
rainy day. When using the weather forecast as input
for the score of an agenda item, the score must also be-
come time-dependent, as it may change during the day.
The weather forecast may also influence the mobility
choice of the user i. e. prioritize the bus on rainy days.
5 AGENDA PLANNING
ALGORITHM
We compute mobility-oriented agendas with the help
of a modified version of the Cluster Search Cluster
Routes (CSCRoutes) algorithm proposed in (Gavalas
et al., 2015). These modifications include the addi-
tion of various categories based on the OpenStreetMap
category model, handling of dependencies between
various insertable locations, computing the journey
times between various locations on-the-fly during the
execution of the algorithm and improving the algo-
rithm’s runtime by designing further insertion heuris-
tics. CSCRoutes is a heuristic algorithm for the TD-
TOPTW based on the ILS meta-heuristic.
5.1 Workflow
The mobility-oriented agenda planning agent requires
data from multiple information sources as it integrates
agenda planning with mobility planning: A mobility-
oriented agenda planner needs to have access to POI
information because we require the POI’s name, its
category, its location, its opening hours, and a unique
identifier. The POI information is used for the plan-
ning of tasks, as they may need to be performed at
special locations, i. e. buying bread at a bakery. Fur-
thermore, the algorithm must be able to compute pub-
lic transit and walking journeys between the locations
of different agenda items. To this end, we also need
the schedule of the public transportation service. The
workflow of the algorithm, which is illustrated in Fig-
ure 2, is then as follows: We first obtain the POI and
road information from OpenStreetMap and extract
the relevant information from it. Then, we also ob-
tain the relevant public transportation information as a
GTFS file
1
and combine it with the OpenStreetMap ex-
tract using Graphhopper to obtain routing information.
Graphhopper is an open source route planning library,
which recently added support for public transit plan-
ning. The CSCRoutes algorithm queries Graphhopper
during the execution and no routing information be-
tween POIs is pre-computed. In contrast to that, the
POI database is pre-computed by the algorithm from
the OpenStreetMap extract. Afterward, we use the POI
information and the route planner to run the adapted
version of the CSCRoutes algorithm (Gavalas et al.,
2015).
5.2 Optimization Algorithm
In the first step of the MAPP algorithm, before execut-
ing the optimization algorithm, we transform it into a
TDTOPTW as explained in Section 4. The transforma-
tion already ensures, that all appointments are correctly
planned. An optimization algorithm is then executed
on the remaining spare time in order to find suitable
tasks for this spare time. The optimization algorithm
itself is mostly adopted from the CSCRoutes algorithm
(Gavalas et al., 2015), with various changes to adapt
it to the domain of agenda planning. The algorithm is
changed to allow an enforced order on agenda items
and to be able to handle POIs of different categories.
CSCRoutes is based on the Iterated Local Search (ILS)
meta-heuristic from (Louren
c¸
o et al., 2003) and em-
ploys several local search steps. The pseudocode of
the ILS algorithm is shown in Algorithm 1. The ILS
meta-heuristic consists of four methods that are re-
quired to be implemented: GenerateInitialSolution,
1
https://developers.google.com/transit/gtfs/
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
562

OSM File
GTFS File
Osmosis OSM Extract OsmPoisPbf POI Information
CSCRoutes
Algorithms
Routing InformationGraphhopper
Computed
Mobility Agenda
Figure 2: Workflow of the MAPP Algorithm. The rectangles show information, and the ellipses depict a modification of
information.
LocalSearch, Perturbation and AcceptanceCriterion.
At first, we generate an initial solution with the Gen-
erateInitialSolution method and search for an local
optimum using the LocalSearch method. After we
initialized the solution the algorithm is repeated until
the termination criterion is met. In this loop the algo-
rithm attempts to escape from the local optimum with
the Perturbation method from the previous iteration,
reaches a new local optimum with the LocalSearch
method and selects the starting solution for the next
iteration with the AcceptanceCriterion method. When
the termination criterion is met, the algorithm returns
the best found solution.
Algorithm 1
: Iterated Local Search Algorithm. Adapted
from (Lourenc¸o et al., 2003).
1: s
0
← GenerateInitialSolution
2: s ← LocalSearch(s
0
)
3: repeat
4: s
0
← Perturbation(s, history)
5: s
00
← LocalSearch(s
0
)
6: s ← AcceptanceCriterion(s, s
00
, history)
7: until termination criterion met
The CSCRoutes algorithm implements the differ-
ent methods of the ILS algorithm. CSCRoutes has a
route initialization phase which is run at the beginning
that initializes the different routes with first tasks. Af-
terward, local search operations are performed in order
to reach the local optimum. CSCRoutes has two local
search operations implemented, the insertion step and
the replace step. The insertion step inserts new tasks
into the different route, until no insertion is possible
anymore, while the replace step attempts to replace
already inserted tasks with higher scored non-inserted
tasks. Perturbation is implemented in the shake step.
The shake step removes a certain number of tasks from
the routes, so that new tasks can be inserted in the
next iteration. So that the CSCRoutes algorithm does
not get trapped in the same local optimum over and
over again, it always continues its search from its last
found solution, After reaching a pre-defined number
of non-improving iterations, the CSCRoutes algorithm
terminates.
Heuristics.
As the search space for the agenda plan-
ning algorithm is large, especially if it has a nation-
wide database of POIs, heuristics need to be used to de-
crease the algorithm’s runtime. Hence, the CSCRoutes
algorithm only checks certain POIs for insertion in
each iteration. For this, it assigns clusters to all POIs
in the dataset based on their geolocation in a pre-
processing step. The clusters are then used to con-
strain the insertion and replacement step of the algo-
rithm. With the exception of the starting and ending
location, this constraint forbids it to revisit clusters
in a route. This property is called the cluster route
constraint (Gavalas et al., 2015). Once a POI belong-
ing to a cluster
c
has been inserted into the routes, all
POIs belonging to
c
can only be inserted into the route,
when it is adjacent to another POI belonging to cluster
c in the route.
5.3 Problems with Existing Approaches
In Section 4, we have seen that the TDTOPTW needs
to be extended to compute useful mobility agendas.
The TDTOPTW lacks the definition of categories of
POIs and dependencies between agenda items. In
our use case, categories are required to find suitable
locations for tasks. Furthermore, CSCRoutes pre-
processes the data in such a way that using a larger
number of POIs is infeasible (Gavalas et al., 2015). As
a agenda planner should not only be usable in a con-
fined area, but preferably work worldwide, the number
of POIs may become large. The CSCRoutes algo-
rithm, however, computes the fastest journey between
all pairs of POIs for every time step and obtains a large
travel-time matrix. (Gavalas et al., 2015) used
1440
time steps per day, one per minute. These time steps
are needed to deal with the time-dependent nature of
public transit journeys. However, the pre-processing
step only needs to store the non-dominated shortest
travel times between each pair of POIs and not a travel
time for each time step. A departure
dep
1
dominates
another departure
dep
2
, if it starts later than
dep
2
, but
arrives at the same time or earlier at the destination
than
dep
2
. This pre-processing step is very costly, es-
pecially with larger number of POIs. The advantage of
the preprocessing is that it allows to acquire relevant
Flexible Multicriterial Agenda Planning in Public Transit Systems
563

travel times by a simple lookup in the matrix.
However, pre-calculating all travel times is infeasi-
ble, when regarding a larger number of POIs.
Instead of pre-calculating all pair-wise travel times,
we utilize the GraphHopper
2
routing engine to find
journeys from one location to another location. In
theory, the regions to compute mobility agendas in,
can then be significantly larger. The major downside
of this approach, however, is that the computation of
point-to-point journeys takes much longer than a ma-
trix lookup. While we only need to read a single value
from the travel-time matrix obtained by preprocess-
ing the data, we need to compute a viable journey
on-the-fly using a multimodal router. The computation
of journeys takes several orders of magnitude longer
compared to looking up the relevant information in the
matrix. Hence, a trade-off between computation time
and storage requirements exists, but the more POIs are
supported, the less attractive the pre-processing step
becomes.
Another significant advantage of the GraphHopper
approach is that, we know the locations of transfers
and the waiting time at transfer stations. This infor-
mation is lost, when only storing the travel time and
disregarding the transfers itself. Lastly, determining
the required information for the user when calculating
the route on-the-fly, is significantly simpler. A user
expects to have an itinerary which tells her where to
enter and to exit vehicles and which roads she should
take to her location. The travel-time matrix itself only
stores the travel time, therefore, there is a need for a
post-processing step that attempts to recreate the meta-
information of the route. By directly calculating the
journeys with a route planner, we can easily extract
the routing information for the user and exactly guide
her to her locations.
5.4 Additional Heuristics
As the number of POIs that a mobility-oriented agenda
planner needs to consider is much larger than a solver
for the TTDP, we had to implement further heuristics
to the algorithm to reduce the computation time. We
have a trade-off between quality of the solution and the
algorithm’s runtime. The more the heuristic limits the
search space, the worse the computed result will be,
nevertheless we attempted to find heuristics that try to
reduce the negative impact on the result’s quality. The
CSCRoutes algorithm spends most of its runtime in
the scoring function of possible insertions, as it needs
to calculate the additional time an insertion would cost.
To score an insertion of a POI
p
k
between a POI
p
i
and
2
https://github.com/graphhopper/graphhopper
p
j
, two journeys need to be computed: The traveling
time from p
i
to p
k
and from p
k
to p
j
.
Most of the time it is not important for the scor-
ing whether the travel time is slightly inaccurate, as
long as the calculated value for the travel time is close
enough to the real travel time. The idea here is to only
approximate the cost of an insertion in an attempt to
minimize the number of journey computations. As we
have already clustered the POIs, we will also use the
clustering step to enable a better use of caching. In the
scoring step, instead of calculating the travel time from
one POI directly to another POI, we will use the travel
time from a POI to the other POI’s cluster centroid.
On the one hand this approach results in more cache-
hits and allows to reduce the number of costly travel
time computations, whereas, on the other hand the
scoring of insertions is less accurate as the travel time
between POIs is only approximated. Nevertheless, the
correctness of the results is ensured, because we will
calculate the actual travel time between the locations,
when inserting the selected POI into the agenda. As
long as we only regard intra-city mobility agendas at
the moment, this heuristic returns reasonable results,
as most POIs are not far away from their respective
centroids. When extending the support to inter-city
mobility agendas, a better heuristic needs to be found.
Another heuristic regards the selection of possible
POI insertions. The solution of (Gavalas et al., 2015)
regarded most POIs for insertion, only limited by the
cluster constraint. Therefore, we propose to limit the
area in which the algorithm is able to select POIs for
insertion from. This is problematic for the general OP,
as the score of a POI and its location are completely in-
dependent. For the MAPP, however, an approximation
like this is slightly less problematic as we assume that
the score of POIs in the same category does not drasti-
cally differ. We restrict the algorithm, when inserting
POI
p
k
between POIs
p
i
and
p
j
to only search for POIs
which are in a certain radius around
p
i
or
p
j
, or along
a corridor on the path from
p
i
to
p
j
. In this way we
reduce the search space of the algorithm, while still
allowing for many of the most important POIs to be in-
serted. If no suitable POI could be found for insertion,
the search area can be widened. The downside of this
heuristic is, that POIs that are further away, but where
many other highly-scored POIs are located might be
missed, when they are outside of the search area of
the algorithm. This is not a problem for an agenda
with many appointments and only short time windows
for tasks, but becomes a larger problem when a lot of
spare time is available. When more time is available,
it might be more sensible to travel further to reach a
cluster with several highly scored POIs, i. e. a mall,
because the travel time inside the cluster will be small.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
564

If not much time is available in the route, traveling to
a cluster that is far away does not make much sense, as
performing all tasks at that cluster may not be possible
due to the time constraints of the next appointment.
Setting the search distance for POIs, therefore, could
depend on the available spare time in that specific time
slot in the route.
6 EVALUATION
In the following section, we will evaluate the practical
feasibility of mobility-agenda planning and our agenda
planning agent.
6.1 Methodology
To evaluate the agenda planning algorithm, we have
designed a short survey with which we attempted to
answer the following questions:
•
Which aspects of agenda planning and mobility
planning are important and how do they interact
with each other?
•
Which features of a mobility-oriented agenda are
most important to users?
•
Which features of a mobility-oriented agenda plan-
ning agent are most important to users?
•
How well does the agent planned agenda fare
against manually planned agendas by the partici-
pants?
The survey was structured into four different parts,
for each of the above listed research questions. We
aimed to evaluate mobility agenda planning, both qual-
itatively and quantitatively. Hence, the fourth part of
the survey was interactive in which we have asked
the participants to plan a mobility agenda of a fictive
persona. We have designed a persona and a scenario
as the agenda planner does not have a user interface
as the moment. This allowed us to ask the partici-
pants to plan an agenda for the same query as our
agenda planning agent. We were then able to com-
pare the manually planned solution to the solution
of the agenda planning algorithm. Additionally, we
have asked the participants to evaluate the agent and
manually planned mobility agenda themselves and list
advantages and disadvantages of both agendas.
To ease the effort of planning an agenda for the
respondents, we designed and implemented a journey
planner based on GraphHopper that overlays the rele-
vant POI information on a map, on an interactive web-
site. On the one hand, this simplified the question for
the participants, as only a single website was required
to be used. While on the other hand, this allowed the
respondents to work on the same data basis as the op-
timization algorithm. The fictive agenda that had to
be planned, consisted of one appointment and seven
tasks. This scenario was chosen, because planning
appointments is not difficult, as they are completely
inflexible. The interesting aspect is the temporal and
spatial placement of tasks. Furthermore, two tasks
had to be completed at specific POIs and in a specific
time frame, whereas the others could be completed any
time at their respective category. Additionally, we have
added a single dependency between two tasks. The
agenda then consists of two distinct routes. The total
visiting time of all tasks (without the appointment) is
101
minutes, which does not include the journey time
between the various POIs.
6.2 Results
We implemented a prototype agenda planning agent in
Python 3.5.2 with SciPy for the clustering algorithms
and helper functions, joblib for the parallelization of
the algorithm and GraphHopper for computing public
transit journeys. The software was run inside a vir-
tual machine configured with 8 vCPUs (Intel Xeon
E5-2650 clocked at 2.20GHz) and 8GB of RAM. As
this survey only attempts to show first insights into
the topic and is not meant to be representative in any
way, most of the 14 respondents have been students.
For most of the respondents the location of the sce-
nario was not well-known. Unfortunately, the sample
group is too homogeneous for a meaningful qualitative
feedback, while the sample size is too small for an
expressive quantitative feedback.
The short evaluation of mobility agenda planners
showed that most respondents think that an agenda
planner would help them to organize and plan their
day. They expect the agenda planner to be especially
useful in unfamiliar locations or cities, whereas they
only expect limited utility in known places. The mini-
mization of unintended breaks in the agenda and the
completion time was listed as crucial. For agenda plan-
ning in general, optimizing the agenda as a whole is
more important to the participants, than optimizing the
distinctive journeys between agenda items. Most of
the respondents indicated that influencing the means
of transportation is not very important to them, as long
as the choice is sensible. A few respondents, how-
ever, expect to have full control over the choice of
transportation. Specifying own time frames for cer-
tain tasks and an enforced order of agenda items were
named as the most important features. Embedding ex-
ternal information, such as a weather-dependent score
was listed as the least important feature.
Flexible Multicriterial Agenda Planning in Public Transit Systems
565

Figure 3 shows the completion time of the created
agenda. It can be seen, that the automatically planned
agenda is slightly better than the average of manually
created agendas. However, one participant of the sur-
vey has created a faster agenda than our implemented
agenda planner, showing that there is still room for
improvement for the agenda planning algorithm. It
shows that, at least when only comparing the comple-
tion time of the agenda, the agenda planner is able to
compute agendas that are slightly better than most of
the manually planned agendas.
Figure 3: Completion time of the manually and automatically
generated agendas.
Figure 4: Planning of the manually and automatically gener-
ated agendas.
Figure 4 shows the time it took for planning the
respective agenda. The agenda planner was a lot faster
than the participants. This comparison, however, is not
representative as the respondents had to use a newly
developed tool, that they were not familiar with. Fur-
thermore, the way the agenda had to be planned was
not as it would be in a real-life setting. Nevertheless,
it shows that planning an agenda is a time-consuming
task, especially in a not so well known location. The
agenda planner took around 5 minutes to compute a
single agenda after 10 non-improving iterations. For
an interactive agent system, these 5 minutes are far
too long. Most of the runtime is spent in assigning
scores to the possible insertions of tasks and in the
computation of journeys between two locations, this
part of the algorithm needs to be improved.
Even though the completion time is similar, people
preferred aspects of their own agenda. One of the most
noted aspect is that the agenda planner planned more
tasks more towards the evening of the day, whereas
most respondents said that they prefer doing their tasks
in the morning. The agenda planner planned the tasks
mostly in the evening, because it was slightly faster to
visit them there. This is due to the fixed location tasks
that had to be visited in the morning and in the evening,
as the user was then already in the vicinity of other suit-
able locations. The manually planned agendas by the
participants were mostly as compact as possible, i. e.
they started the agenda early and ended it early. In con-
trast to that, the agenda planner placed more free time
in the beginning of the agenda and placed more tasks
into the afternoon. Therefore, the continuous free time
was smaller than that of the manually planned agendas,
which was perceived as a negative aspect in the survey.
Since the agenda planner favors agenda items from
the same clusters, the algorithm found clusters where
several of the tasks could be completed, which people
mostly missed. People liked this aspect of the agenda
planner, because this means that the number of pub-
lic transit journeys is reduced and locations which are
reachable with a short amount of walking are preferred.
Another aspect that people have criticized is that there
is not enough room for customizability of the query at
the moment. Overall, the computed agenda was rated
with an average of 4.23 on a scale from 1 to 5, and half
of the people remarked that the computed agenda is
better than their manually planned agenda.
7 CONCLUSION AND FUTURE
WORK
While no expressive conclusion can be drawn from the
evaluation, it shows that planning mobility-oriented
agendas with an intelligent agent is feasible in practice.
The computed agendas were mostly shorter than the
manually planned ones and were rated only slightly
worse by the some of the participants of the survey.
For the future, the evaluation and the algorithm’s per-
formance have to be improved. For this paper, we
have evaluated the mobility agenda planner only with
a single agenda, which only shows that it is able to
compute mobility agendas in this one scenario. There-
fore, a better evaluation method has to be implemented
for our planner. Furthermore, the approach was only
tested for intra-city mobility itineraries.
For future work we have, thus, identified two main
aspects. The first aspect is to improve the evaluation
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
566

of potential solutions to the problem. For this, a user
interface needs to be designed, which allows people to
plan their own itineraries with the agent, so that more
scenarios are covered. In addition to more scenarios,
the review of people’s own agendas will be more use-
ful as people have a stronger opinion about their own
mobility itineraries. Missing functionality and fea-
tures can, therefore, be more easily detected. Research
on the design on such an interface has already been
started in (Wienken et al., 2017). Future work should
evaluate these design guidelines and implement a user
interface for the agenda planner so that people can
interact with it. A user interface, however, may not
be restricted to a graphical user interface. Currently
intelligent personal assistants, such as Amazon Alexa,
Apple’s Siri, and Google Assistant are becoming more
popular. They allow users to interact with software
using natural speech. Such a electronic personal agent
may support the user then in planning their mobility-
agenda. As the personal assistant already has access
to the calendar and the preferences of the user, it al-
ready has much of the required information. These
personal agents already individually support the user
in agenda planning and mobility planning, but an inte-
grated solution that combines these aspects is missing.
The intelligent agent will act more like a recommender
system in such a scenario, because it does not automat-
ically compute the whole agenda, but suggests date
and locations for certain tasks of the user.
The other aspect of future work focuses on the
optimization problem itself. Furthermore, the men-
tioned drawbacks and missing functionalities have to
be addressed in future work, so that people can in-
struct the agent more precisely in how it should plan
the mobility-oriented agenda. The algorithm’s runtime
also has to be improved, as waiting for 5 minutes in an
interactive scenario for the answer of the agent is unre-
alistic. Additionally, the algorithm can be designed to
respect user profiles, which we have not regarded at all.
A user profile may either be obtained by explicitly let-
ting the user complete a survey which then constructs
the user profile or by learning the user profile while
she interacts with the agent.
ACKNOWLEDGMENTS
This work was partially funded by the German Fed-
eral Ministry of Transport and Digital Infrastructure
(BMVI) for the project “Digitalisierte Mobilit
¨
at – die
Offene Mobilit
¨
atsplattform” (19E16007B).
REFERENCES
Baena-Toquero, M. J., Muros-Cobos, J. L., Rodr
´
ıguez-
Valenzuela, S., and Holgado-Terriza, J. A. (2014). To-
wards sustainability in multi-modal urban planners. In
Connected Vehicles and Expo (ICCVE), 2014 Interna-
tional Conference on, pages 492–497. IEEE.
Boussier, S., Feillet, D., and Gendreau, M. (2007). An exact
algorithm for team orienteering problems. 4OR: A
Quarterly Journal of Operations Research, 5(3):211–
230.
Garcia, A., Vansteenwegen, P., Arbelaitz, O., Souffriau, W.,
and Linaza, M. T. (2013). Integrating public transporta-
tion in personalised electronic tourist guides. Comput-
ers & Operations Research, 40(3):758–774.
Gavalas, D., Konstantopoulos, C., Mastakas, K., Pantziou,
G., and Vathis, N. (2015). Heuristics for the time depen-
dent team orienteering problem: Application to tourist
route planning. Computers & Operations Research,
62:36–50.
Golden, B. L., Levy, L., and Vohra, R. (1987). The orien-
teering problem. Naval Research Logistics, 34(3):307–
318.
Gunawan, A., Yuan, Z., and Lau, H. C. (2014). A mathe-
matical model and metaheuristics for time dependent
orienteering problem. In Proceedings of the 10th In-
ternational Conference of the Practice and Theory of
Automated Timetabling, pages 202–217. Research Col-
lection School Of Information Systems.
Li, F., Cheng, D., Hadjieleftheriou, M., Kollios, G., and
Teng, S.-H. (2005). On trip planning queries in spatial
databases. In International Symposium on Spatial and
Temporal Databases, pages 273–290. Springer.
Louren
c¸
o, H. R., Martin, O. C., and Stutzle, T. (2003). It-
erated local search. International series in operations
research and management science, pages 321–354.
Lu, E. H.-C., Chen, H.-S., and Tseng, V. S. (2017). An
efficient framework for multirequest route planning in
urban environments. IEEE Transactions on Intelligent
Transportation Systems, 18(4):869–879.
Sharifzadeh, M., Kolahdouzan, M., and Shahabi, C. (2008).
The optimal sequenced route query. The VLDB Journal
— The International Journal on Very Large Data Bases,
17(4):765–787.
Vansteenwegen, P. and Van Oudheusden, D. (2007). The
mobile tourist guide: an or opportunity. OR insight,
20(3):21–27.
Wienken, T., Kr
¨
omker, H., and Spundflasch, S. (2017).
Agenda planning-design guidelines for holistic mobil-
ity planning. In International Conference on Human-
Computer Interaction, pages 713–720. Springer.
Wienken, T., Mayas, C., H
¨
orold, S., and Kr
¨
omker, H. (2014).
Model of mobility oriented agenda planning. In Inter-
national Conference on Human-Computer Interaction,
pages 537–544. Springer.
Zografos, K. G. and Androutsopoulos, K. N. (2008). Al-
gorithms for itinerary planning in multimodal trans-
portation networks. IEEE Transactions on Intelligent
Transportation Systems, 9(1):175–184.
Flexible Multicriterial Agenda Planning in Public Transit Systems
567
