
Dynamic Cloud-based Vehicle Apps
Information Logistics in Disaster Response
Oleg Gusikhin
1
, Ayush Shah
1
, Omar Makke
1
, Alexander Smirnov
2
and Nikolay Shilov
2
Research and Advanced Engineering, Ford Motor Company, 20300 Rotunda Drive, 48121, Dearborn, Michigan, U.S.A.
2
SPIIRAS, 39, 14 Line, 199178, St.Petersburg, Russia
Keywords: Disaster Response, Dynamic Vehicle Applications, Disaster Ontology, Connected Vehicle.
Abstract: The efficient management of transportation networks during disruptions caused by manmade accidents or
natural disasters is a major attribute of the Resilient Smart City Transportation. There have been extensive
research and development towards intelligent automatic disaster response systems. The majority of the
proposed systems provide information logistics to the response team. In general, motorists caught in the
disaster area typically tend to “go with the flow” or operate in an unorganized manner that may hamper the
emergency response efforts. Connected vehicle technology and interactive vehicle applications enable the
possibility to provide personalized information to individual motorists. This paper proposes the concept of
dynamic vehicle applications integrated with cloud-based intelligent disaster response command and control
system to facilitate evacuation, personalized routing, volunteering, and information gathering. The
intelligent back end extends the knowledge based disaster response system for professional responders to
automatically generate the guidance for the individual participant. The proposed dynamic vehicle
applications leverage open source SmartDeviceLink interface and Node.js.
1 INTRODUCTION
Information Logistics is one of the crucial aspects
of an efficient and effective evacuation and
disaster response efforts. Information logistics is a
field of business information systems that are
focused on the concepts, methods and tools to
provide the right information at the right time, in
the right quality, in the right format and at the right
place to the right actors (Smirnov et al. 2005b,
Sandkuhl, K., 2008).
In the past two decades there have been
significant R&D activities to address centralized
control and coordination of disaster response
activities resulting in the development of next
generation command and control systems (e.g.,
Chaudhury et al., 2012). The majority of such
Command and Control (C&C) systems target the
support of professional responders. There has not
been as much progress in the development of the
efficient information logistics infrastructure for
general population, specifically information
logistics to the motorists caught in the disaster
area.
The emergence of connected vehicles
technologies enables to integrate the individual
motorists with the C&C to further improve the
efficiency of the disaster response. Such
information logistics allow the increase of the
evacuation efficiency by taking into account the
attributes of individual vehicles, provide methods
to receive automatic reports about the conditions of
the road and surrounding area in the given
location, and even incorporate volunteers into
certain disaster response efforts.
Connected vehicles technologies can
personalize evacuation, e.g. four-wheel drive truck
or SUV may take certain shortcuts during an
evacuation that may be inaccessible to front wheel
sedans and sports vehicles. The evacuation route
may also be affected by the available fuel, electric
vehicle battery charge, and the availability of
refueling and recharging options on the possible
evacuation routes
In some situations, supporting certain areas is
constraint by the availability of resources and the
ease of accessibility of the areas. However, in
many cases, the affected people do not strictly
need professional assistance in order to resolve
626
Gusikhin, O., Shah, A., Makke, O., Smirnov, A. and Shilov, N.
Dynamic Cloud-based Vehicle Apps.
DOI: 10.5220/0006815606260635
In Proceedings of the 4th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2018), pages 626-635
ISBN: 978-989-758-293-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

their challenges, e.g., transportation from the
disaster area, starting a vehicle with battery failure,
or pulling a vehicle out of a gutter. In these cases,
the participation of volunteers can fill the gaps,
assuming these volunteers have access to the
proper information and coordinate properly. This
reduces the demand for professional rescuers who
can concentrate on more critical locations.
Nevertheless, the volunteers are usually
unorganized, and in many cases their efforts to
help cause more problems. For example, “…what
they do is just to create more traffic on the roads
and they impede the flow of the critical goods
getting to the area” (Gehr, 2017).
Therefore, providing efficient means to
incorporate the disjointed volunteer resources into
a centralized disaster response C&C center has the
potential to transform these resources to valuable
assets to complement the efforts by the
professional responders (or at least prevent these
volunteers from “getting in the way”) and increase
efficiency of the response effort (e.g., FEMA,
2017).
This paper tackles the challenge of bringing
information logistics and automation in disaster
response to motorists in order to help them
organize in an effective and efficient manner. The
concept of “Dynamic Cloud-based Vehicle
Applications” is introduced in section 4, which is a
new type of vehicle applications, and an example
is provided to demonstrate how these applications
may function in real scenarios.
2 DISASTER RESPONSE
AUTOMATION
Usually, disaster response operations involve a
large number of different heterogeneous teams
(sometimes multinational), which have to
collaborate in order to succeed. Such teams may
include medical brigades, firefighters, rescuers,
military personnel, commercial / governmental /
non-commercial organizations, volunteers, etc.
Besides, during such operations it may be
necessary to use external sources to get the
required information (e.g., medical databases,
transport availability, weather forecasts). Their
coordination requires intensive information
exchange in order to achieve the necessary level of
the situational awareness, create ad-hoc action
plans, and continuously update relevant
information (Smirnov et al., 2010).
In (Smirnov et al. 2005a) a conceptual
framework and hybrid technology for operational
decision support based on the concept of
information logistics was developed. The main
idea behind the conceptual framework was using
an ontology-based context model for modelling the
current situation and solving incoming problems.
Ontology properties of this model make the
context a sharable model that can be accessible by
its components for the purposes of exchanging and
integrating the right information and providing
knowledge at the right place and time. The context
components are related to various resources of
information and knowledge. Context properties of
the context model enable the decision support
system to process and interpret the dynamic
information flow at the right time.
In (Smirnov et al., 2010) an approach to
organizing resources in a smart environment for
disaster response was proposed, and is shown in
figure 1. It is based on the above conceptual model
and assumes Web-services forming an ad-hoc
service network according to the context of the
current situation. The Web-services are responsible
for producing real-time picture of the disaster
situation, receiving diverse information resources,
and problem solving. These Web-services provide
an ontology-based model of a disaster situation
that embeds models for problems requiring
solutions in this situation. Harmonization of Web-
service descriptions and the ontology allows the
Web-services to exchange information about their
needs and possibilities in terms of the ontology
vocabulary. The functions of the identifying
problems to be solved and distribution of actions
or tasks between acting agents can be implemented
in a unit called “task manager”.
The ontology-based problem model
represented as context following the idea of
information logistics provides the Web-services
with awareness about the problems to be solved in
the disaster situation and information needed for
this. The response members’ profiles allow the
Web-services to take into account specific
information about the members as well as their
tacit and explicit preferences. As a result, the Web-
services become capable to form a service network
for a common purpose (Smirnov et al., 2010). If
the service assumes the presence of a human
behind it, it renders information through an
adaptive interface provided by a “front end
generator” in the right form. For example, the
“front end generator” can generate information
Dynamic Cloud-based Vehicle Apps
627

using HTML5 which can be viewed by operators
using web browsers.
Figure 1: Ontology-based automated disaster response
system.
Although the system in figure 1 was designed to
address the information logistic needs for
professional responders (Smirnov et al., 2010), this
system can be extended to include the general
population, specifically motorists.
3 CONNECTED VEHICLES
SERVICES
Proliferation of connected vehicle technologies
facilitates information support of the motorists
caught in disaster area. In general, the term
connected vehicle refers to the technologies that
enable two-way communication between vehicle
systems and outside world, including cloud,
roadside infrastructure, and other vehicles. Today,
there is a variety of different approaches to
implement connected vehicle, such as OEM
installed embedded modem, OBDII plug-in
(Kolmanovsky et.al. 2011), integration with
customer mobile phone (Yeung et. al. 2017), or
DSRC Vehicle to Vehicle (V2V) or Vehicle to
Infrastructure (V2I) technologies (Kenney 2011).
In many cases the vehicle combines several of
these technologies that allow improving robustness
of telematics tasks through a multiprotocol
connectivity manager (Zaborovski et. al. 2013).
There are a number of connected vehicle
services to help the motorists in emergency or
hazardous situations or environments. One way to
provide the emergency assistance is through OEM
installed embedded modem. For example, OnStar,
ERA-GLONASS and E-Call utilize the vehicle’s
embedded modem to connect vehicle occupants to
the dispatcher and transmit the vehicle status data.
OnStar connects the vehicle driver with the OnStar
advisor who can direct emergency services to
vehicle location, and provide evacuation routes or
other necessary assistance in case of accident,
disaster or severe weather. ERA-GLONASS and
E-Call are government regulated systems that
connect the vehicle occupants to the local Public
Safety Answering Point (PSAP) and transmit the
critical data in case of accident. (Öörni et al. 2015).
Another way to provide assistance to the
motorist is through mobile applications integrated
with the vehicle’s head unit. For example,
KATWARN system provides smart phone
application that can be integrated with Ford
SYNC3 system using Applink. The service
provides warnings and behavioral advices for the
user’s current location, as well as for seven freely
selectable locations, and offers topic-related safety
information quickly to the Ford SYNC GEN3
infotainment system (Katwarn, 2017; Ford 2017a).
Another example of such app is HAAS Alert
(HAAS Alert R2V, 2017). HAAS Alert alerts
motorists when emergency responders are in the
vicinity or en route, responding to a call. HAAS
Alert has partnered with Waze to provide users
with emergency incident locations and warnings
when emergency services (Firefighters, Police,
EMS) are on the scene to warn and/or re-route
drivers to avoid collisions and delays. HAAS Alert
has demonstrated Applink integration of their
mobile application at SmartDeviceLink Hackathon
2017 (Ford, 2017b).
With the help of these applications, drivers can
make decisions on how to avoid collisions, select
alternative routes and reduce traffic delays.
However, in order to take advantage of these
applications the app needs to be already loaded
into the driver phone.
These connected vehicle services provided the
motorists with new methods to handle uncommon
situations, and were a step closer to dynamic
cloud-based vehicle applications.
RESIST 2018 - Special Session on Resilient Smart city Transportation
628

4 DYNAMIC CLOUD-BASED
VEHICLE APPLICATIONS
4.1 Motivation
The existing connected vehicle emergency services
have certain limitations to support effective and
efficient information logistics for motorists in the
affected area. These services are either requiring
preinstalled application or involve human
operators that may increase response time, and are
designed to solve specific problems. Moreover, the
vast majority of mobile applications do not
integrate with the vehicle’s head unit, and
therefore are not suitable for motorists to operate
while driving, and therefore they lack in providing
the right information in the right format and at the
right place. The second section of this paper
discussed ontology based systems for disaster
recovery automation. The system operates in a
command and control center and initiates tasks to
concerned parties. The limitations of this system is
extending it to motorists by providing the right
information at the right time in the right place,
whether they are volunteers or part of official
rescue teams. This is due to the fact that the right
time and the right place may depend on the
vehicle’s location, fuel range, and its field
capabilities (towing, reverse electric flow, has
jumper cables, etc.). The need to extend the
ontology based system to include vehicle ontology,
and to combine the system with connected services
become evident. Dynamic cloud-based vehicle
applications combine an extended ontology based
system in the cloud with connected vehicle
services to dynamically interact with motorists
while considering their location, vehicle
capabilities based on the current situation in their
location.
4.2 Foundational Technologies
The specific example of implementing dynamic
cloud based applications described in this paper
utilizes open source SmartDeviceLink (SDL) and
cloud Node.js as a reference platform.
SmartDeviceLink (SmartDeviceLink, 2017)
is
an open source project pioneered by Ford Motor
Company that connects in-vehicle infotainment
systems to smartphone applications allowing
automakers the opportunity to provide customers
with highly integrated connected experiences, and
application developers with new ways of
connecting with their customers (Yeung et. al.
2017). SmartDeviceLink is currently available on
all Ford vehicles equipped with SYNC GEN3
infotainment or above, and will likely be integrated
with the head units of other OEMs in the SDL
consortium, such as Toyota., Suzuki, Mazda and
Subaru. SmartDeviceLink enables mobile
developers to integrate their applications with the
vehicle’s head unit. As of now SDL SDK’s are
available for Android and iOS mobile application
developers. SmartDeviceLink uses Remote
Procedure Calls (RPC) to interact with the vehicle
system. This interaction includes showing
information on the head unit, speaking through the
audio system using text-to-speech embedded
software, add buttons, list, and other interactive
widgets to the head unit based on the content, and
respond to the user’s interactions. These RPCs are
used to trigger a specific action defined by the
application developer. The RPC is issued by the
mobile application and the called procedures are
executed by SDL. Notifications and responses to
the RPCs are sent back from the vehicle’s head
unit to the mobile application. These RPCs use
JSON format to exchange information between the
vehicle and the mobile application. Unlike other
In-Vehicle Infotainment systems (IVI), SDL RPCs
are lightweight and language independent; any
application developer can generate and trigger the
defined RPCs in any language, even though only
Android and iOS SDK are made readily available.
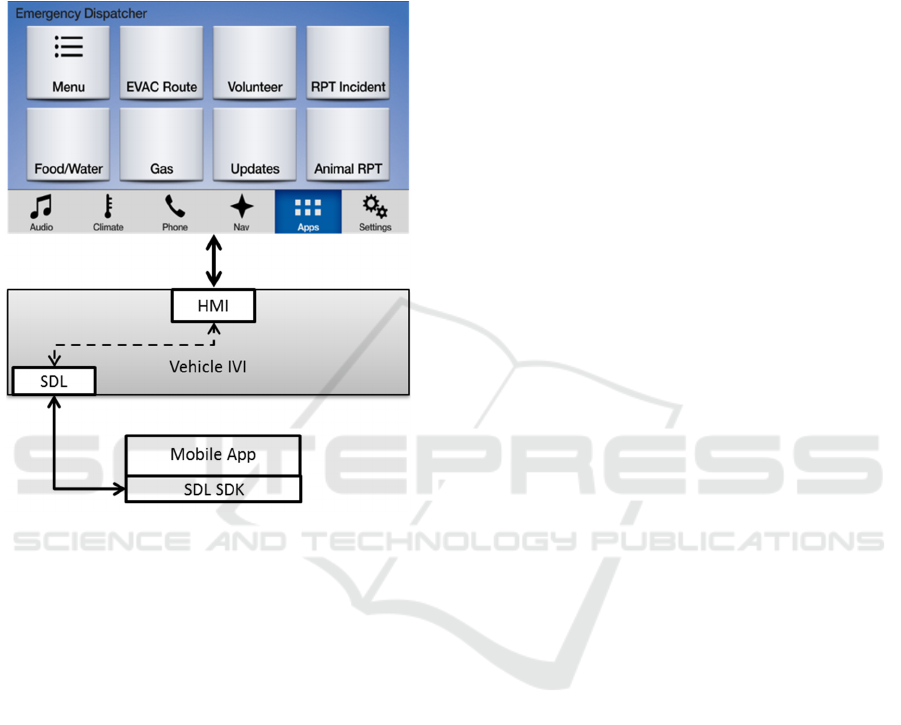
Figure 2 shows a simplified architecture diagram
of current implementation of SDL with Mobile
devices. SmartDeviceLink’s Mobile SDK
generates all the RPCs on behalf of mobile
Application.
These RPCs can be sent to the vehicle over
Bluetooth, TCP/IP, or even through USB. RPCs
are executed the IVI and creates a user interactive
UI individually for each of the applications.
SmartDeviceLink uses a template based approach
where each OEM can implement a set of defined
templates with respect to their driver distraction
guidelines and policies. These templates define
“what” widgets can be on the screen, and the
OEMs define “how” these widgets are located on
the screen. SmartDeviceLink SDK’s can be
extended to other platforms. For example, a C/C++
SDK can be developed to allow sensors to
communicate with the vehicle and present an
interactive interface on the head unit. For this
paper, an SDK for Node.js has been developed to
bring web applications to the vehicles. The
popularity of programming in JavaScript has been
Dynamic Cloud-based Vehicle Apps
629
increasing recently, and more developers are
becoming acquainted with Node.js (Stack
Overflow 2017). SDL Node.js SDK issues the
required RPCs in the cloud which triggers the
respective reaction on the head unit directly,
without requiring a mobile phone.
Figure 2: Current SDL Implementation with Mobile
Applications.
SmartDeviceLink has security features which can
be extended if needed to meet specific
requirements. Its default security settings are based
on policy tables which are securely downloaded
and updated from the cloud, and which contain the
access levels for each OEM approved application.
During the process of approval, the OEM issues an
application ID (App ID) to the developers. When
SDL application starts communicating with the
head-unit, the App ID is sent to the head unit. The
head unit will then look in a local policy table,
which resides in the head unit, to see which RPCs
are allowed to be executed by the application,
based on the App ID. The head unit checks for
policy table updates on regular basis, and
whenever a new App ID is detected. This allows
the OEM to add or revoke permissions at any time.
There are few methods to secure the App ID which
are beyond the scope of this paper.
The local policy table residing in the head unit
contains what the application can execute.
SmartDeviceLink allows the customers to select
which RPCs will actually execute, which allows
users to have full control on what the application
can actually do. For example, an application may
be allowed to extract vehicle data, call 911 in case
of emergency, stream music over Bluetooth,
stream video for navigation applications, trigger
alerts and popups, control radio, climate media or
other modules. Figure 3 shows how SDL is
typically integrated with a local policy table and
the vehicle. This security mechanism applies to all
SDL based applications, including the cloud based
applications which will be discussed in the
following section.
4.3 Cloud-based Vehicle Applications
The architecture of the cloud based vehicle
applications is shown in figure 4. The Head Unit
Service (HUS) is a service which runs in the
vehicle and uses the in-vehicle connectivity
manager to connect to an authentication server and
Node.js server. The HUS can also be implemented
in a mobile application and act as a relay between
the cloud and SDL. The connectivity manager’s
core functionality is to provide connectivity to the
vehicle using any available device or combination
of devices, utilizing multipath TCP if necessary.
(Chari et. Al. 2018). The connectivity manager
may use a telematics unit and a mobile phone at
the same time, or use DSRC V2I for example. The
authentication server in figure 4 has a list of cloud
applications and the required information to access
of the Node.js server for a given user and VIN
number, such as IP address and other
authentication information. This information is
used when the vehicle starts, to notify the cloud
about its status and presence. The List of
applications can be dynamically updated based on
geographical location or time and date.
For example, when a driver approaches a drive-
through to order food, an application for that
restaurant appears on the application list in the IVI.
The Node.js server is the server where multiple
web SDL applications can be running. These
applications are accessed and controlled as soon as
the vehicle is started and HUS is initialized.
RESIST 2018 - Special Session on Resilient Smart city Transportation
630
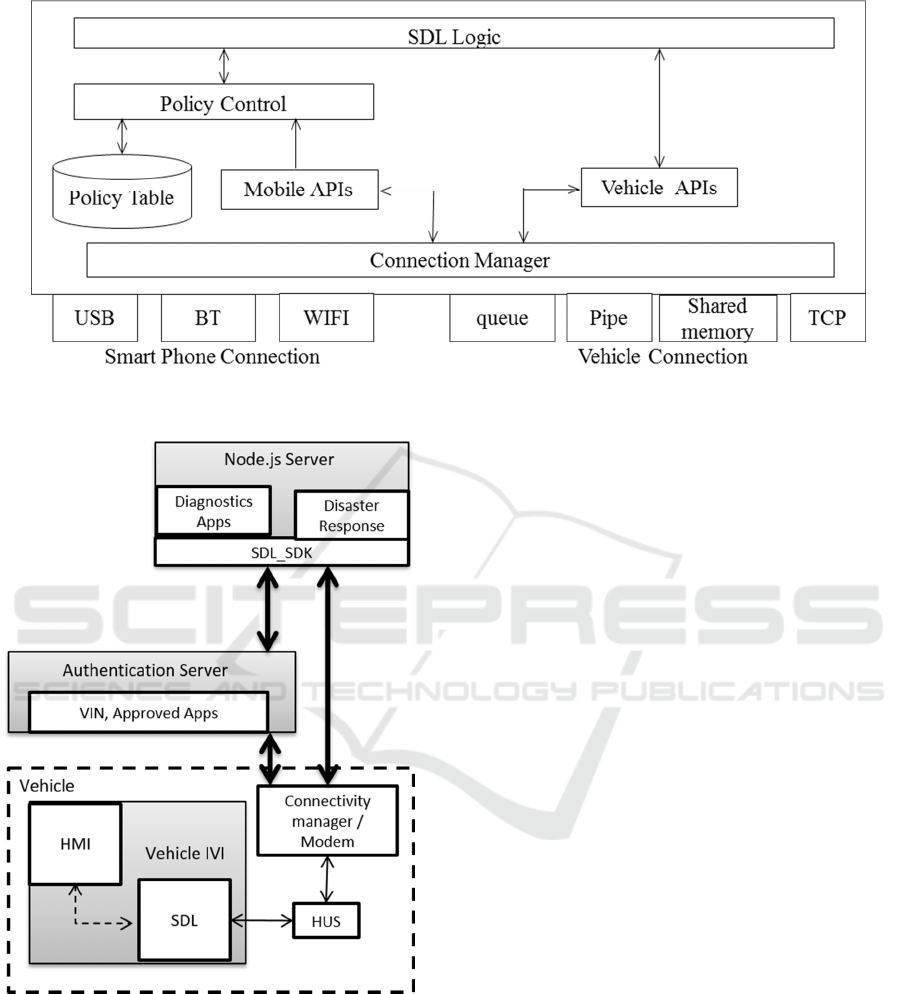
Figure 3: Typical SDL Integration Within a Head Unit.
Figure 4: Web SDL Applications Architecture.
The system in figure 4 works as follows. A
Node.js server is hosted in the cloud. The
authentication server is populated with IP
address/port, geo locations, and other necessary
parameters to bring dynamic content. Whenever
the vehicle is started, HUS creates a request with
vehicle’s VIN number and geo location and sends
a request to authentication server. Authentication
server will respond with list of application
associated with VIN number and geo location.
HUS will then use the list of application received
from the authentication server and causes SDL to
create a session for each application. Once session
is successfully created, Node.js will start
registration process for the applications. The
registration process allows the applications to
appear on the head unit, and from that point, the
driver can start interacting with the application.
SDL Node.js applications receive call-backs such
as button pushes, or notifications about events,
such as fuel level change, gear shift, etc.
Developers can use these notifications to create an
interactive cloud based SmartDeviceLink
applications.
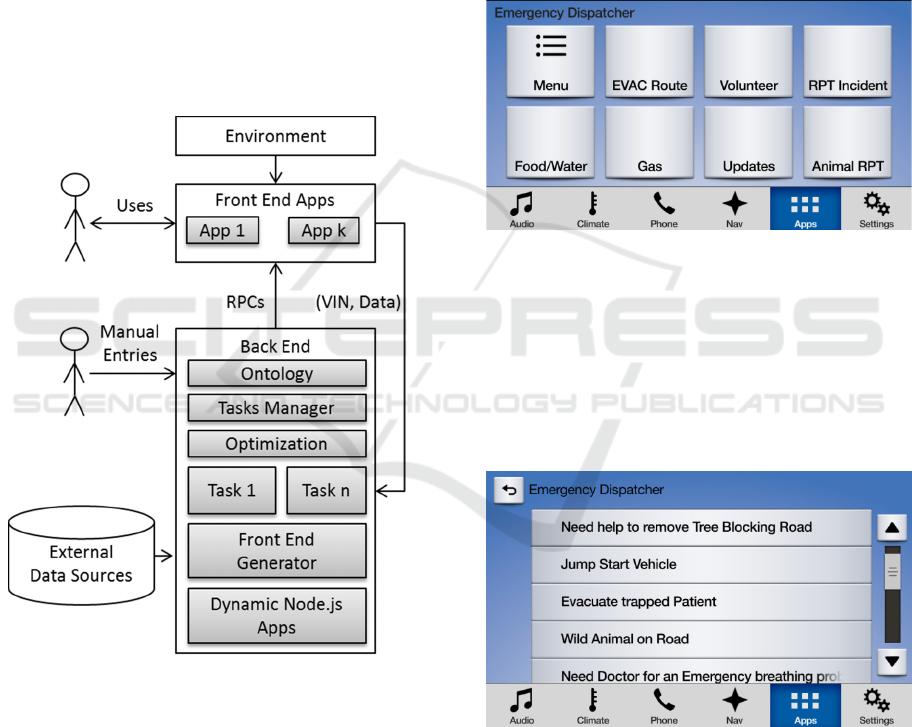
4.4 Dynamic Cloud-based Vehicle
Applications
Dynamic Cloud Applications form a special class
of web applications. The back end is ontology
based context aware intelligent system. At its core
is a Task Manager as seen in figure 5. It receives
user interactions and real-time data as input, and
using an ontology description of both the input
data and the set of problems to be solved (the
objectives), produces an optimized output. The
optimized output is either a new Task description
of a task to be solved, or a modification to a
currently existing Task description. The Task
description feeds into a front end generator which
generates or modifies existing Node.js applications
or the data associated with these applications.
These applications are the Dynamic Applications.
Dynamic Cloud-based Vehicle Apps
631
A notable difference between this approach and the
classical approach of web applications is that there
is no front end code such as JavaScript to be
downloaded onto the vehicle. The backend uses
RPCs and the application on the user’s device is
rendered just-in-time, which makes the concept of
dynamic applications possible. The benefits of
using templates become evident at this point. The
UI design elements, such as colors, font size,
button locations, list menus, etc. is known
beforehand (the selected template). This ensures
that the requirements that the government
regulations and recommendations and the
company’s driver distraction requirements are met.
The use of templates also simplifies the process of
dynamically generating an application because the
UI layout is predefined.
Figure 5: System structure.
Different geographical areas may have different
objectives. As vehicles pass through an affected
geographical area, the drivers are prompted
through the Dynamic Node.js Applications to opt
in to use the application to support in the disaster
recovery efforts and/or to utilize the application’s
functions. Upon acceptance, the application
displays several options to the drivers which are
generated by the Front End Generator. An example
is shown in figure 6. Drivers may use the
application for their own benefit, such as to check
gas prices, water and food availability, and in
return, they provide valuable vehicle data for that
period of time.
The drivers can also use the application to
report incidents which are analyzed by the
knowledge based system which, in turn, interacts
with the Task Manager in the cloud and add to the
objectives. The drivers may also select the option
to volunteer, and then a menu appears, showing the
tasks which are optimized for that vehicle. This is
shown in figure 7.
Figure 6: Dynamically Generated Main Menu.
If the driver chooses to jump start a vehicle, further
information appears about the task. This is shown
in figure 8. The driver may choose to navigate to
that location, view next task, or go back to the
menu. All this HMI logic is generated by the Front
End Generator, and is communicated to the vehicle
using RPCs.
Figure 7: Dynamically Generated Tasks List
The benefit of using SDL becomes evident at this
point. The application appears to be integrated
with the vehicle, and the data is presented in a
controlled fashion. The driver may choose to
navigate to the location. In this case, the address,
via SDL, is pushed to the embedded navigation
system if available. The driver may also call a
RESIST 2018 - Special Session on Resilient Smart city Transportation
632

phone number provided through the backend using
the vehicle’s hands free system.
Figure 8: An Example of Dynamically Generated Task
Information.
The Task Manager in figure 5 is the major
component of the back end system. It is the
component which uses the real-time input from the
connected vehicles and users who are involved in
the disaster recovery efforts. The data received
contains sensory information such as rain sensor
data, fuel level, temperatures, dust, pressure,
camera, etc. and user information such as a list of
available equipment, VIN number which maps to
vehicle’s capabilities (towing, all-wheel drive, …)
volunteering time window etc. This information is
received by the Dynamic Application and is
forwarded to the Task Manager for use.
The Task Manager can also connect to external
data sources such as weather prediction for
example, or retrieve information about functioning
gas stations, clinics, etc. If necessary, the Task
Manager can update any data table associated with
Tasks, which then immediately feeds into the Front
End Generator and update the Dynamic Node.js
Application’s behavior and data in real-time. For
example, a user may be scrolling through available
tasks using the head unit, and then new items can
be added to the scroll menu. It produces a Task
description, which is an implementation
independent description of tables and information
required for a UI to be rendered. This is usually
done as a tree data structure. The Front End
Generator uses this data structure to generate new
or modify existing code and data in the Dynamic
Node.js Application. In summary, the Task
Manager is the component which, based on
ontology and available information, oversees the
behavior of the entire system, independent from
vehicle’s implementation details.
The Dynamic Node.js Application which is
generated by the front end generator is what
appears to be as context aware discoverable
service. The Dynamic Node.js Application
contains all the possible tasks which the vehicle of
a known VIN number with a given user can
achieve. An F150 truck has more capabilities than
a Ford Focus, and if towing capability is required,
the task will not appear in the application within
the Ford Focus. If there are two F150’s, the fuel
level and GPS location can be used to find out
which truck is most suited for what task at known
locations.
5 ILLUSTRATIVE EXAMPLE
In this section, an illustrative example of how this
system is utilized in the case of a stranded vehicle
due to a dead battery is described. The system
receives information about the stranded automatic
transmission vehicle with two people due to dead
battery through its web interface. This information,
shown in figure 9, is processed based on the
system’s internal ontology, and it represents a
fragment of the ontology describing the
“Accident” concept). Then, the system identifies
the appropriate available resources based on the
situation description: for example, requirements of
a jumper cable, the battery specifications, location,
and instruction on how to start it and space for two
extra passengers in case the battery cannot be jump
started.
The services involved and their interactions are
shown in figure 10. It has two sub scenarios:
volunteer registration and disaster response. The
volunteer registration scenario takes place when
the vehicle enters the area affected by the disaster.
First, the gateway ping will return the reference to
the emergency app. The vehicle head unit will
access the application and the alert will be
generated that new emergency assistance
application is available. Then the driver opts in and
the head unit will dynamically load the task
description in the application. The example of the
application is shown previously in figure 8. The
specific implementation and UI may be different
for different municipalities and types of the
disaster.
Similarly, using this application, it is possible
to get road assistance, best personalized evacuation
route; find the best place to get gas based on your
current gas level; find the info and route where to
get food and water; report accident; report animal
danger; or volunteer to provide help to other
people.
Dynamic Cloud-based Vehicle Apps
633
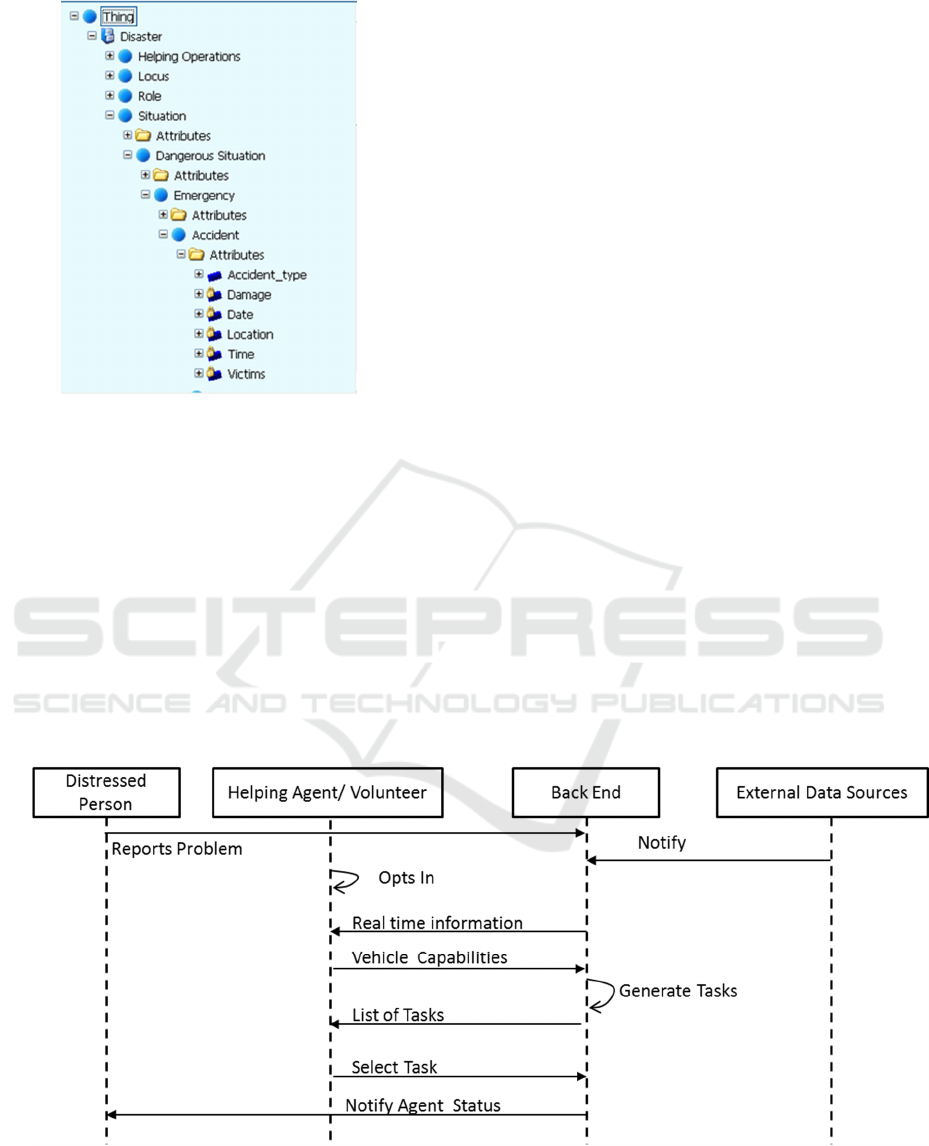
Figure 9: A fragment of disaster response ontology
related to the “Accident” concept.
6 CONCLUSIONS
In this paper, connected vehicle technologies such
as dynamic cloud-based vehicle applications are
shown to enable the possibility to cohesively
integrate disaster response efforts of individual
motorists with existing rescue operations according
to their individual capabilities. A novel approach
to dynamically generate information which
conforms to information logistics philosophy is
discussed. This system is ontology based context
aware system which maps problems to achievable
objectives and assigns them to specific motorists
based on their profile and feedback. The motorists
can interact with these objectives using
dynamically generated applications which are
made possible by leveraging the capabilities and
synergies of Node.js and SmartDeviceLink. The
presented approach extends the information
logistics of cloud based system to vehicle
environment, which allows a better coordination
between first responders’ efforts and all other
motorists in the affected area. Enhancements to
this platform can be made in the future by
mitigating the effects connectivity issues. In
theory, it is possible to mobilize specialized
vehicles which have local cloud infrastructure,
which introduces the concept of cloud-on-vehicle.
Using V2V such as DSRC, or V2I, the
connectivity range can be extended by having the
vehicles out of connected regions to communicate
with a moving cloud-on-vehicle system. The
vehicle would move to areas with connectivity on
daily basis to download new local updates for the
area, and then moves to an affected connectionless
area. A further investigation about the feasibility of
this approach is required, and to see how
connectivity plays in the geographical topology of
the affected area to make this system possible.
Figure 10: Diagram showing the interactions between different components.
RESIST 2018 - Special Session on Resilient Smart city Transportation
634

REFERENCES
Chari, V., Tonshal, B., Kondoju, P., and Gusikhin, O.,
2018, Vehicle Telematics Platform using Multipath
TCP, SAE Technical Paper 2018-01-0753, 2018.
Chaudhury, K., Nibedita, A., & Mishra, P. K. 2012.
Command And Control in Disaster Management.
IJCSI International Journal of Computer Science
Issues, 9(4), 256-259.
FEMA, 2017. How to Volunteer for Hurricane Irma
Disaster Relief. Accessed on 18.12.2017 at
https://www.fema.gov/news-release/2017/09/09/-
how-volunteer-hurricane-irma-disaster-relief.
Ford, 2017a. Ford holt vernetztes Warnsystem
KATWARN ins Auto. Accessed 14.12.2017 at:
https://media.ford.com/content/fordmedia/feu/de/de/
news/2017/02/28/ford-holt-vernetztes-warnsystem-
katwarn-ins-auto.html.
Ford, 2017b. Inaugural SDL Hackathon a Success!
Accessed 14.12.2017 at: https://developer.ford.com/-
pages/inaugural-sdl-hackathon-a-success.
Gehr, D., 2017. Hurricane Harvey volunteer mistakes
cause more harm than good. Accessed on
18.12.2017 at http://www.iowastatedaily.com/news/-
nation/article_e4ec7a46-8d01-11e7-bcef-
3becba27581c.html.
HAAS Alert R2V, 2017. Accessed 14.12.2017 at:
https://www.haasalert.com/.
Katwarn, 2017. The Warning and Information System
for the Public. Accessed 14.12.17 at
https://www.katwarn.de/downloads/en/-
KATWARN.pdf.
Kenney, J.B., 2011, Dedicated Short-Range
Communications (DSRC) Standards in the United
States. Proceedings of the IEEE, vol. 99, no. 7, pp.
1162-1182.
Kolmanovsky, I., McDonough, K., Gusikhin, O., 2011,
Estimation of fuel flow for telematics-enabled
adaptive fuel and time efficient vehicle routing, 11th
International Conference on ITS
Telecommunications (ITST 2011), pp. 139 - 144
Öörni, R., Meilikhov, E., Korhonen, T. O. 2015.
Interoperability of eCall and ERA-GLONASS in-
vehicle emergency call systems, IET Intelligent
Transport Systems, 2015, Vol. 9, Issue 6, pp. 582–
590.
Sandkuhl, K., 2008. Information Logistics in Networked
Organizations: Selected Concepts and Applications.
In: Filipe J., Cordeiro J., Cardoso J. (eds) Enterprise
Information Systems. ICEIS 2007. Lecture Notes in
Business Information Processing, vol 12. Springer,
Berlin, Heidelberg, 43-54.
SmartDeviceLink, 2017. SmartDeviceLink. Accessed
14.12.2017 at: https://www.smartdevicelink.com/.
Smirnov, A., Levashova, T., Kashevnik, A.,
Krizhanovsky, A., Shilov, N. 2010. Self-
Organisation of Smart Environment Resources for
Disaster Management and Relief. In: Crisis
Management (Patrick Alvintzi and Hannes Eder,
eds.), Nova Publishers, 371 pp., ISBN: 978-1-60876-
570-6, 2010, pp. 157-196.
Smirnov, A., Pashkin, M., Chilov, N., Levashova, T.
2005a. Constraint-Driven Methodology for Context-
Based Decision Support. J. of Decision Systems,
Lavoisier, Vol. 14, No. 3, 2005, pp. 279 – 301.
Smirnov A., Pashkin M., Levashova T., Chilov N.,
2005b. Fusion-Based Knowledge Logistics for
Intelligent Decision Support in Network-Centric
Environment. In: George J Klir (Ed.) International
Journal of General Systems. Taylor & Francis,
34(6), pp. 673-690.
Stack Overflow, 2017. Stack Overflow Developer
Survey 2017. [ONLINE] Available at:
https://insights.stackoverflow.com/survey/2017.
[Accessed 15 December 2017].
Yeung, J., Makke, O., MacNeille, P., and Gusikhin, O.
2017. SmartDeviceLink as an Open Innovation
Platform for Connected Car Features and Mobility
Applications, SAE Int. J. Passeng. Cars – Electron.
Electr. Syst. 10(1):231-239, 2017
Zaborovski, V., Chuvatov, M., Gusikhin, O., Makkiya,
A., Hatton, D., 2013, Heterogeneous multiprotocol
vehicle controls systems in cloud computing
environment. Proceedings of the 10th International
Conference on Informatics in Control, Automation
and Robotics (ICINCO 2013) Vol. 1, pp. 555 – 561.
Dynamic Cloud-based Vehicle Apps
635
