
Towards Intelligent Tuning of Frequency and Transmission Power
Adjustment in Beacon-based Ad-Hoc Networks
Javier Rubio-Loyola
1
, Hiram Galeana-Zapien
1
, Francisco Aguirre-Gracia
1
, Christian Aguilar-Fuster
1
,
Sandy Bolufé
2
, Cesar A. Azurdia-Meza
2
and Samuel Montejo-Sánchez
2
1
Centre for Research and Advanced Studies (CINVESTAV), Tamaulipas, Mexico
2
Department of Electrical Engineering, Universidad de Chile, Santiago, Chile
Keywords: Ad-Hoc Networks, Beacon-based, Genetic Algorithm, Transmission Power, Beacon Frequency.
Abstract: This paper presents a genetic-based approach to determine optimal values of frequency and transmission
power in beacon-based ad-hoc networks. The approach has been evaluated through simulations, and it has
demonstrated to be more efficient than a dynamic control of frequency and transmission power, with
reduction of up to 73% in packet collisions and with reduction of packet losses of up to 63% in an urban
scenario. The approach and the results presented in this paper represent our initial efforts towards a more
efficient control of beacon frequency and transmission power, which can exploit the benefits of a genetic-
based approach but that can be applied in runtime in practical scenarios.
1 INTRODUCTION
Intelligent transportation systems (ITSs) refer to the
integration of information and communication
technologies with transport infrastructures. The goal
is to design novel applications to enhance road
safety and traffic efficiency (Maimaris, 2016). To
this end, modern vehicles are equipped with multiple
sensors such as global positioning system (GPS)
receivers, proximity sensor, cameras, among others.
These sensors are used for different applications
such as parking assistance, lane keeping, pedestrian
detection. In this regard, information exchange
among vehicles is essential to expand the scope of
these applications. However, in order to provide
information to each vehicle, especially those that are
not in the field of vision of drivers, it is of
paramount importance the design of timely efficient
dissemination approaches.
A prominent approach to message dissemination
relies on the deployment of vehicular ad hoc
networks (VANETS). In a VANET, the vehicles are
equipped also with On-Board Units (OBUs) and air
interfaces allowing the information exchange via
either vehicle-to-vehicle (V2V) or vehicle-to-
infrastructure (V2I) communication paradigms
(Fazio, 2013; Reis, 2014). VANETs operate on the
dedicated short-range communication (DSRC)
spectrum at 5.9 GHz to be used exclusively for V2V
and V2I communications (Zhu, 2003). DSRC relies
on several standards designed for vehicular
communications, including the IEEE 802.11-OCB1
operation mode, formerly known as IEEE 802.11p
(IEEE, 2016), which defines physical (PHY) and
medium access control (MAC) layers for Wireless
Access in Vehicular Environments (WAVE) (IEEE,
2017).
VANETs can be considered as a subset of mobile
ad-hoc networks (MANETs), but they have specific
characteristics that distinguish them (Dorronsoro,
2014) in terms of topology changes, low link
availability, communication paradigms, etc. An open
research challenge in VANETs is how to provide
cooperative knowledge among vehicles, which in
turn is a basic requirement of multiple applications
of road safety and traffic management. This
cooperative knowledge is built upon the periodic
exchange of messages called beacons, which contain
important data, about the status of the vehicle, such
as position, speed, and acceleration (ETSI, 2014).
The beaconing process, allows the receiver vehicles
to create a Local Dynamic Map (LDM) based on
surrounding environment information, which is
essential for the proper performance of cooperative
awareness applications, which also require high
reliability and low delays. However, the wireless
cooperation between vehicles is a challenging
648
Rubio-Loyola, J., Galeana-Zapien, H., Aguirre-Gracia, F., Aguilar-Fuster, C., Bolufé, S., Azurdia-Meza, C. and Montejo-Sánchez, S.
Towards Intelligent Tuning of Frequency and Transmission Power Adjustment in Beacon-based Ad-Hoc Networks.
DOI: 10.5220/0006817306480656
In Proceedings of the 4th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2018), pages 648-656
ISBN: 978-989-758-293-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

problem due to a large amount of dynamic data. In a
VANET, the problem becomes more stringent due to
the mutual interferences (Cailean, 2014).
It is worth noting that, while a fixed beacon
transmission rate can easily increase the channel
load and saturate the network, especially in
scenarios with high vehicle density (Schmidt, 2010),
a reduction of the beacon transmission rate may
result in a reduction of quality and freshness of the
information (Jiang, 2008). Consequently, the
position errors can impact the proper performance of
cooperative safety applications, which rely on real-
time accurate information. In this context, the
Vehicle Safety Communications Consortium
(CAMP, 2005), specifies 10 beacon/s as the
minimum beacon rate required by several
cooperative safety applications, while others can
demand up to 50 beacons/s.
In this regard, defining the beacon
communication parameters that can meet the
requirements of all applications for all potential
scenarios is a very complex task, since the beacon
requirements depend on application type (Sepulcre,
2011a) and vehicular context (Sepulcre, 2011b).
Therefore, it is essential to define the most relevant
metric for safety-critical applications. In this sense,
in previous work (Bolufé, 2017; Ortega, 2018) we
proposed the position error as the priority metric,
due to its impact on the timely detection of
potentially dangerous situations. More specifically,
in (Bolufé, 2017), we proposed an algorithm that
dynamically adjusts the beacon rate based on vehicle
movement status. This approach was experimentally
evaluated in (Ortega, 2018), using test bed
equipment for vehicular communications. The
objective of these previous works is twofold. On the
one hand, these previous works assess the dynamic
adjusting of the beacon rate to achieve a target
position error, that can meet the requirements of
cooperative safety applications. On the other hand,
driven by the vehicle movement status, the approach
adjusts the transmit power considering the channel
load and the beacon rate with the aim of reducing
packet collisions.
More recently, in (Bolufé, 2018), we propose the
use of a novel joint power & rate control distributed
algorithm in cooperative vehicular networks.
Simulation results show that the dynamic control of
beacon transmission rate limits the average position
error, and the use of maximum transmit power leads
to an increase of packet collisions. However, the
joint power & rate control allows reducing the
packet collisions. Although the approach in (Bolufé,
2018) outperforms other beaconing strategies in
terms of a trade-off between the main performance
metrics, we believe that the fine-tuning, by
evolutionary algorithms, of this joint power & rate
control will allow obtaining better results.
This paper presents our initial efforts toward
intelligent tuning of frequency and transmission
power adjustment in beacon-based VANETs. This
paper presents an approach to exploit the benefit of
genetic algorithms in the setting of beacon rate and
power transmission parameters. More specifically,
the contributions of this work are as follows:
• We propose the use of genetic algorithms (GA)
to search for beacon rate and power
transmission parameters that outperform other
approaches in terms of packet losses, packet
delivery, and number of collisions.
• To the best knowledge of the authors, this study
presents the first reference to the use of GAs in
the beaconing process.
This paper is organized as follows. Section 2
presents the state of the art. Section 3 presents the
baseline approach to adapt beacon rate and power
transmission parameters. Section 4 presents our
initial approach towards intelligent control of rate
and power transmissions. Section 5 presents
simulation results. Section 6 concludes the paper.
2 STATE OF THE ART
Adaptive beacon techniques have been the subject of
research since the last decade, all in all, assuming
simplified scenario conditions. The main goal of
these techniques is to adapt the beacon rate and
power effectively considering the channel load and
specific application requirements. To address this
problem, different adaptive beacon strategies have
been proposed (Shah, 2016; Zemouri, 2014;
Sepulcre, 2016; Aygun, 2016). These strategies
combine the control of beacon rate and transmission
power, according to the channel load and specific
application requirements. In (Zemouri, 2014) the
transmission rate is adapted to meet the channel
requirements in terms of collision rate and channel
busy ratio (CBR), while the transmit power is
adjusted according to the required awareness level.
In the algorithm of Sepulcre et al. (Sepulcre, 2016),
the packet rate of each vehicle is set according to the
minimum beacon rate required by each application
and it is set according to the required packet
reception rate at the application warning distance.
The algorithm, of Aygun et al. (Aygun, 2016),
adapts the transmit power in order to reach a desired
awareness ratio at the target distance while adjusting
Towards Intelligent Tuning of Frequency and Transmission Power Adjustment in Beacon-based Ad-Hoc Networks
649
the beacon rate to limit the current channel busy
ratio. However, all these approaches do not consider
the vehicle movement status and the vehicular traffic
dynamics, factors that affect the system
performance.
Optimization methods can be broadly classified
into two main classes: exact and approximate (Talbi,
2009). On one hand, exact methods ensure finding
the optimal solution to the optimization problem.
However, their complexity and high computational
demand are not suitable to tackle real-world
optimization problems. Alternatively, evolutionary
algorithms (EAs), which are population-based
metaheuristics, allow obtaining acceptable solutions
in a reasonable time (Dorronsoro, 2014). EAs have
been widely used in many scientific domains such as
ad-hoc networking (Reina, 2016). Depending on the
execution mode, the EAs can be deployed in
VANETs following an off-line or an on-line
approach. While off-line approaches help to search
for the best suitable parameters configuration, a
special care must be taken in highly dynamic
scenarios. On the other hand, online approaches are
expected to adapt their behavior (i.e., find the best
parameter solutions) during runtime.
In this regard, EAs have been employed in
optimization processes to finding optimum topology
in MANETs (Reina, 2016) as well as to optimize the
deployment of Road Side Units (RSUs) to maximize
the coverage (i.e., number of vehicles covered) in a
given area (O. Dengiz, 2011). More specifically, in
(Galaviz-Mosqueda, 2016), the authors proposed a
component-based methodology using GAs for the
membership functions tuning problem for
broadcasting protocols in VANETs. Other recent
examples of the use of GAs in VANETs are on
optimizing the topology connectivity (Dorronsoro,
2009), realistic vehicular mobility models
(Seredynski, 2012), optimize routing protocols
(Toutouh, 2012), and optimizing broadcasting (Jafer,
2016; Jafer, 2017).
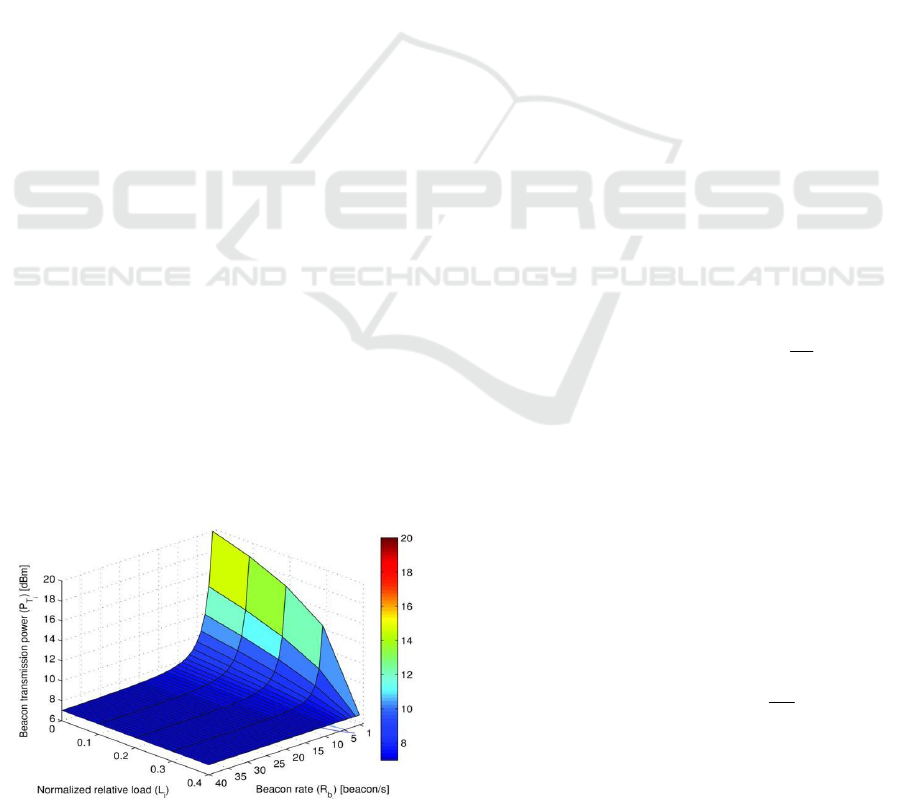
Figure 1: P
Ti
as a function of L
i
and R
bi
, according to (2).
From the aforementioned ideas, it is clear that
genetic algorithms have been applied for optimizing
different parameters in VANETs and MANETs.
However, to the best knowledge of the authors, this
study presents the first reference to the use of GAs
in the beaconing process.
3 DYNAMIC CONTROL OF
TRANSMISSION
PARAMETERS
This section aims to describe the Dynamic Control
of Beacon Transmission Rate and Power (DC-
BTR&P) algorithm developed in (Bolufé, 2018).
Due to its enhanced performance, the DC-TR&P
algorithm will be used as the baseline approach for
intelligent tuning of transmission rate and power
(described in Section 4).
The DC-BTR&P approach adjusts the beacon
transmission parameters to meet the position
accuracy requirements of cooperation aware
applications. DC-BTR&P is capable of adapting to
the vehicular traffic dynamics and to the vehicle
movement status reducing interferences
guaranteeing the vehicle's minimum warning range.
The DC-BTR&P algorithm uses the position error as
a priority metric due to its impact on vehicular
systems ability to detect and mitigate potentially
dangerous traffic situations in real-time. The beacon
rate is computed by the vehicle n
i
as a function of its
velocity (v
i
) and acceleration (a
i
) expressed as:
()
(
)
042
2
=−+++
iDibDiibi
EtvItavIa
ii
(1)
, where I
bi
is the beacon interval of n
i
(equivalent to
the inverse of beacon transmission rate R
bi
); t
D
is the
transmission delay, which is equal for all vehicles by
assuming beacons of the same size and equal data
rate; and Ē
i
is the average position error computed
by surrounding vehicles. Once the beacon rate has
been set, DC-BTR&P adapts the beacon transmit
power according to the relative channel load and the
preset beacon rate, in order to decrease packet
collisions. The beacon transmit power is adjusted by
n
i
using the expression (2).
()
β
−
−−+=
ii
b
o
i
TTTT
R
L
L
PPPP 1
minmaxmin
(2)
, where PT
min
is the transmit power required by n
i
to
generate a minimum warning range, P
Tmax
is the
maximum transmission power allowed, L
o
is the
RESIST 2018 - Special Session on Resilient Smart city Transportation
650
normalized critical channel load, L
i
is the normalized
relative channel load on n
i
and β is the weight factor,
which controls the impact of the beacon rate on the
transmission power. L
i
is computed considering the
impact of multiple transmitters, and the distance to
each neighbor vehicle. It should be noted that (2)
controls the beacon transmission power between
minimum and maximum transmit power values,
being P
Ti
= P
Tmin
for L
i
= L
o
, and P
Ti
= P
Tmax
for L
i
≈
0 and R
bi
= 1 beacon/s. Figure 1 shows the transmit
power according to the normalized relative channel
load and beacon transmission rate, with P
Tmin
= 7
dBm, P
Tmax
= 20 dBm, L
o
= 0.4, and β = 2. Note that
the transmit power decreases when the normalized
relative channel load or/and the beacon transmission
rate increases, while a minimum warning range is
guaranteed.
4 INTELLIGENT CONTROL OF
BEACON TRANSMISSION
RATE AND POWER
This section firstly provides an overview of
fundamental concepts of GAs. Then, we elaborate
on the integration of GAs towards providing
intelligent tuning of frequency and power
parameters in a beacon-based ad-hoc networking
scenario.
4.1 Fundamentals of GAs
The genetic algorithm is based on the evolution
process of living beings. In which, over generations,
the populations evolve following the principles of
natural selection (the survival of the fittest)
postulated by Darwin. This algorithm was proposed
by Goldberg and Holland in 1998 (Goldberg, 1998).
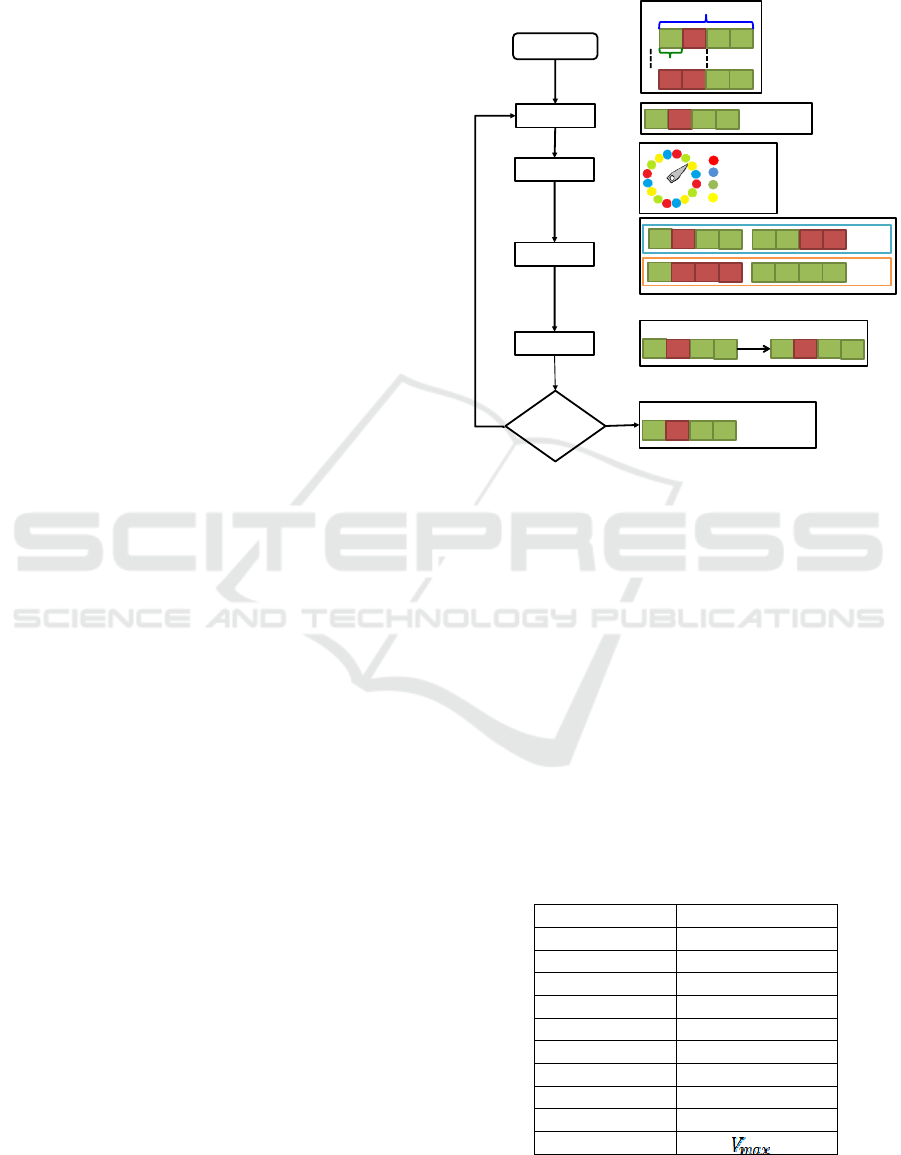
The baseline procedure of a GA is depicted in
Fig. 2. The initial population is randomly created as
a set of candidate solutions, where an objective
function is used a fitness measure. Based on this
fitness, the better individuals (solutions) have a
higher probability to be selected to the next
generation by applying recombination and mutation.
The recombination process is applied to two selected
individuals (parents), resulting in two new solutions.
On the other hand, the mutation process is applied to
one individual and it results in one new solution.
Therefore, by applying recombination and mutation
processes, the algorithm produces a set of new
solutions, called children. Based on their fitness,
these children compete for a place in the next
generation. This procedure can be iterated until a
solution is found or a previously set of generations
limit is reached.
Initial
population
Evaluation
Selection
Crossover
Mutation
Stop
criterion
No
1
0 1
1
F(1,0,1,1)= 11
1
0 1
1
Chromosome
1
N
0
0 1
1
Gen
1
0 1
1
1
0 0
0
1
1 0
0
1 1
1
1
Parents
Children
1
0 1
1
1
1 1
1
Bit Inversion
Yes
1
0
1
1
Final solution
F(1,1,1,1)= 15
Individual 1
Individual 2
Individual 3
Individual 4
Figure 2: General scheme of a genetic algorithm.
4.2 GA-based Control of Beacon
Transmission Rate and Power
(GA-BTR&P)
This section presents our initial GA-based
Transmission Rate and Power (GA-BTR&P) control
approach. GA-BTR&P adjusts the transmission rate
and power at once, taking into account deterministic
rules based on the vehicle travel speed. For this
purpose, we performed a discretization of the travel
speed values in 10 possible ranges, which are shown
in Table 1. It should be mentioned that the V
max
value is the maximum possible travel speed of a
Table 1: Ranges of the travel speeds for deterministic
rules.
Speed Range (i) Vehicle speed (V
k
)
1 0 - 10 km/h
2 11 - 20 Km/h
3 21 - 30 Km/h
4 31 - 40 Km/h
5 41 - 50 Km/h
6 51 - 60 Km/h
7 61 - 70 Km/h
8 71 - 80 Km/h
9 81 – 90 Km/h
10
91 -
Km/h
Towards Intelligent Tuning of Frequency and Transmission Power Adjustment in Beacon-based Ad-Hoc Networks
651
vehicle (
V
k
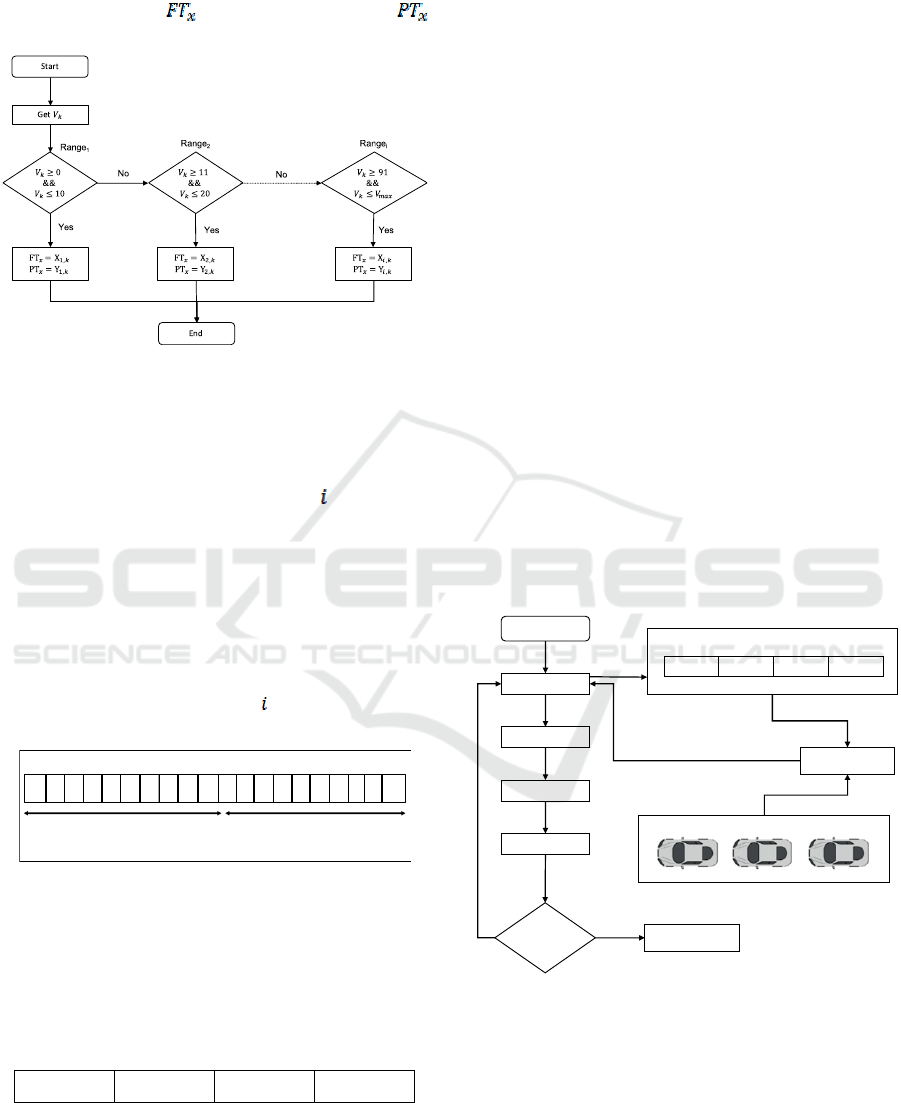
) during a given simulation. The Fig. 3
shows the GA-BTR&P flow diagram to obtain the
values of frequency
and power transmission
of the vehicle k (veh
k
).
**V
k
is the speed of the vehicle k (veh
k
)
Figure 3: Deterministic & rule-based definition of
frequency and power transmission values.
The GA-BTR&P approach considers the range of
the travel speed to determine the values of frequency
X
i,k
and power transmission Y
i,k
, for the speed range
of vehicle k (veh
k
). It is important to mention that the
values of the variables X
i,k,
and Y
i,k
are determined
(i.e. optimized) with the genetic algorithm. For this
reason, we propose the encoding presented in Fig. 4
for the vehicles. Each vehicle is represented by a set
of 20 variables: 10 related to the frequency and 10
related to the power transmission. We consider one
variable of frequency and one variable of power
transmission for each range
of vehicle speed
presented in Table 1.
X
1,k
X
2,k
X
3,k
X
4,k
X
5,k
X
6,k
X
7,k
X
8,k
X
9,k
X
10,k
Y
1,k
Y
2,k
Y
3,k
Y
4,k
Y
5,k
Y
6,k
Y
7,k
Y
8,k
Y
9,k
Y
10,k
Transmission
frequencies.
Transmission
power.
Vehicle
k
Figure 4: Proposed vehicle encoding.
Each population individual is represented by a
set of k vehicles, where k is the total number of
vehicles in the scenario as it is graphically shown in
Figure 5. It should be mentioned that each vehicle
consists of a set of 20 variables (see vehicle
encoding in Fig. 4).
(Individual of the population)
Vehicle
1
Vehicle
2
… Vehicle
k
Figure 5: Proposed individual encoding.
In order to lay down the concepts of our GA-
based approach, we make use of a simulation
platform where the GA-based approach can iterate
and refine (i.e. optimize) the values for transmission
rate and power. For this purpose, we use the
OMNet++ simulation platform, although our
approach can be applied to other platforms. Figure 6
represents the optimization scheme for k vehicles
where each vehicle has 20 candidate variables, 10
for transmission power transmission and 10 for
beacon rate (see encoding in Fig. 4). The
performance of each population individual (i.e. the
set of k*20 variables) is evaluated through
OMNet++ simulations. The performance of each
population individual is evaluated in an urban
mobility scenario for which the optimization
procedure is executed. In each simulation (i.e.
evaluation), the number of packet collisions is used
to calculate the fitness value. A lower number of
collisions represents a greater fitness value of the
population individual. Each evaluation of the
population individual is followed by the selection,
recombination, and mutation processes of the
genetic algorithm until the stop criterion is met. At
the end of the evolutionary process, the best
parameters of frequency and transmission power for
each speed range of each vehicle are obtained for a
given urban mobility scenario.
Initial population
Evaluation
Selection
Crossover
Mutation
Stop
criterion
Individual
Parameters
OMNET simulator
Scenario
Metrics (number of collisions)
Best parameters
Vehicle
1
Vehicle
2
… Vehicle
k
Yes
No
Figure 6: GA-based simulation platform.
5 SIMULATION RESULTS AN
TECHNICAL DISCUSSION
This section compares the performance of the
baseline DC-BTR&P algorithm with our GA-based
RESIST 2018 - Special Session on Resilient Smart city Transportation
652

Transmission Rate and Power (GA-BTR&P) control
approach.
5.1 Simulation Setup
Our simulations are intended to evaluate the
performance of the above approaches to disseminate
cooperative knowledge. The simulations were
performed considering a scenario with a grid-shaped
square of five streets on each side. The square has
sixteen blocks of 200m per side. Each street is
crossed by a car with the direction shown in Fig. 7.
The maximum speed of the vehicles was set to
100km/h, with an acceleration and deceleration of 2
m/s
2
and 4.5 m/s
2
respectively. The simulation
parameters are summarized in Table 2.
Table 2: Simulation parameters.
Parameter Value
Map shape grid
Number of streets 5 x 5
Dimensions 0.8 km x 0.8 km
Maximum speed 100 km/h (27.8 m/s)
Acceleration 2 m/s
2
Number of vehicles 10
Vehicle travel time ≈ 80 sec
Figure 7: Simulation map with directions of vehicles.
5.2 Comparative Results
This section compares the performance of the DC-
BTR&P and GA-BTR&P approaches. Namely, we
evaluate their performance in terms of number of
collisions and packet delivery, which in turn are
representative parameters that allow for efficient
cooperative knowledge. Table 3 shows the
performance of the transmission rate and power
parameters defined by both, the DC-BTR&P and
GA-BTR&P approaches.
Table 3: Performance comparison for cooperative
knowledge.
Metric DC-BTR&P GA-BTR&P
Packets Sent
4051 4052
Lost packets
49 18
Delivery effectiveness
98.79% 99.55%
Number of collisions
48 13
In more detail, Table 4 shows the actual values
of the vehicles in our simulations for each metric.
The results demonstrate that our GA-based approach
can reduce the number of collisions up to a 73% and
the packet losses can be reduced up to a 63% in this
urban scenario. These results demonstrate that the
performance of a dynamic allocation of beacon
transmission rate and power certainly can be
enhanced with the use of an intelligent approach, i.e.
based on a genetic algorithm. Nevertheless, there are
important aspects that need to be considered
regarding these partial conclusions. These are
discussed in the next section.
Table 4: Values produced for each vehicle in simulations.
Metric
Vehicle
Packets
Sent
Packets lost Number of
collisions
DC
BTR&P
GA
BTR&P
DC
BTR&P
GA
BTR&P
DC
BTR&P
GA
BTR&P
Veh[0]
396 396 3 2 3 1
Veh [1]
397 397 1 0 1 0
Veh [2]
396 396 3 0 3 0
Veh [3]
432 432 5 2 5 2
Veh [4]
395 395 13 3 12 2
Veh [5]
398 398 1 1 1 0
Veh [6]
398 398 1 1 1 0
Veh [7]
420 421 15 6 15 5
Veh [8]
397 397 2 0 2 0
Veh [9]
422 422 5 3 5 3
TOTAL
4051 4052 49 18 48 13
5.3 Technical Discussion
The results presented in Section 5.2 are encouraging,
they demonstrate that there is still a reasonable
margin to enhance the performance of the DC-
BTR&P by means of an intelligent approach.
Moreover, there are important aspects that deserve
special attention in this respect.
Towards Intelligent Tuning of Frequency and Transmission Power Adjustment in Beacon-based Ad-Hoc Networks
653

On the one hand, the DC-BTR&P approach is a
distributed beaconing algorithm that performs
transmission frequency (Ftx) and transmission
power (Ptx) adjustments in each vehicle. In the
implementation of this algorithm, each vehicle
calculates the Ftx according to its speed and the
average position error limit perception of its
neighbors. Then the transmitter vehicle calculates
the probability of successful reception of its
neighbors and with the Ftx already calculated, the
Ptx of the same vehicle is calculated. Before sending
a beacon, each vehicle makes these calculations to
minimize the average position error (dynamically
adjusting the Ftx) and to reduce the number of
collisions (by adjusting the Ptx).
On the other hand, the GA-BTR&P approach
uses a genetic algorithm to find in each vehicle, the
best values of Ftx and Ptx to achieve a reduction in
the number of collisions in the scenario for the speed
ranges of each vehicle. Nevertheless, this approach
has to execute a number of iterations, which in turn
makes it computationally expensive so that, it
difficult to be applied to practical scenarios. A trade-
off solution that can exploit the benefits of our GA-
BTR&P approach in favor of a fast and more
efficient version of the DC-BTR&P approach will be
the basis of our future work.
6 CONCLUSIONS AND FUTURE
WORK
This paper has presented our initial steps towards
intelligent tuning of frequency and transmission
power adjustment in beacon-based ad-hoc networks.
A genetic-based beacon control has been proposed
and simulation results have demonstrated that an
intelligent-based approach can outperform a
dynamic control in terms of a number of collisions
(with reductions up to 73%) and packet losses (with
reductions up to 63%) in our urban simulation
scenario. Nevertheless, this advantage can be
considered relative, as an intelligent-based approach
like the one described in this paper can be
computationally prohibitive for real scenarios due to
time constraints. In this regard, we are currently
developing a trade-off solution, where the genetic-
based approach can be used to produce values of
frequency and transmission power that can take into
account a target average error together with the
number of collisions. This way, the genetic
algorithm can be used to produce a regression-based
polynomial function that could be used to estimate
the beacon frequency for a given vehicle speed,
which in turn could be used by the DC-BTR&P
approach to produce frequency values to enhance its
performance closer to the performance of the GA-
BTR&P approach but in runtime.
ACKNOWLEDGEMENTS
This paper has been supported by the National
Council of Research and Technology (CONACYT)
through grant FONCICYT/272278 and the
ERANetLAC (Network of the European Union,
Latin America, and the Caribbean Countries) project
ELAC2015/T100761. This paper is also partially
supported also by project TEC2015-71329-C2-2-R
(MINECO/FEDER).
REFERENCES
Maimaris, A., & Papageorgiou, G. (2016, November). A
review of Intelligent Transportation Systems from a
communications technology perspective. In 19th
International Conference on Intelligent
Transportation Systems (ITSC), 2016 (pp. 54-59).
IEEE.
Dorronsoro, B., Ruiz, P., Danoy, G., Pigné, Y., & Bouvry,
P. (2014). Evolutionary algorithms for mobile ad hoc
networks. John Wiley & Sons.
Cailean, A. M., Cagneau, B., Chassagne, L., Popa, V., &
Dimian, M. (2014, November). A survey on the usage
of DSRC and VLC in communication-based vehicle
safety applications. In 21st Symposium on
Communications and Vehicular Technology in the
Benelux (SCVT), 2014 (pp. 69-74). IEEE.
Fazio, P., De Rango, F., & Lupia, A. (2013, November). A
new application for enhancing VANET services in
emergency situations using the WAVE/802.11 p
standard. In Wireless Days (WD), 2013 IFIP (pp. 1-3).
IEEE.
Zhu, J. and Roy, S., 2003. MAC for dedicated short-range
communications in intelligent transport system. IEEE
Communications Magazine, 41(12), pp.60-67.
IEEE Std 802.11, 2016. IEEE Standard for Information
technology - Part 11: Wireless LAN Medium Access
Control (MAC) and Physical Layer (PHY)
Specifications. Revision of IEEE Std 802.11-2012, pp.
1–3534.
IEEE P1609.0/D9, 2017. IEEE Draft Guide for Wireless
Access in Vehicular Environments (WAVE)-
Architecture. pp. 1–104.
ETSI, 2014. Intelligent Transport Systems (ITS);
Vehicular Communications; Basic Set of Applications;
Part 2: Specification of Cooperative Awareness Basic
Service, Technical Specification (302 637-2) V1.3.2.
RESIST 2018 - Special Session on Resilient Smart city Transportation
654

Schmidt, R. K., Leinmuller, T., Schoch, E., Kargl, F. and
Schafer, G., 2010. Exploration of adaptive beaconing
for efficient intervehicle safety communication. IEEE
Network, 24(1), pp. 14-19.
Jiang, D. and Delgrossi, L., 2008, May. IEEE 802.11 p:
Towards an international standard for wireless access
in vehicular environments. In IEEE Vehicular
Technology Conference (VTC Spring 2008) (pp. 2036-
2040). IEEE.
CAMP VSCC, 2005. Vehicle Safety Communications
Project: Task 3 Final Report: Identify Intelligent
Vehicle Safety Applications enabled by DSRC.
NHTSA, US DoT, Tech. Rep. HS 809859.
Shah, S. A. A., Ahmed, E., Xia, F., Karim, A., Shiraz, M.
and Noor, R.M., 2016. Adaptive beaconing
approaches for vehicular ad hoc networks: a survey.
IEEE Systems Journal.
Zemouri, S., Djahel, S. and Murphy, J., 2014, October.
Smart adaptation of beacons transmission rate and
power for enhanced vehicular awareness in vanets. In
IEEE 17th International Conference on Intelligent
Transportation Systems (ITSC). (pp. 739-746). IEEE.
Sepulcre, M., Gozalvez, J., Altintas, O. and Kremo, H.,
2016. Integration of congestion and awareness control
in vehicular networks. Ad Hoc Networks, 37, pp.29-
43.
Aygun, B., Boban, M. and Wyglinski, A. M., 2016.
ECPR: Environment-and context-aware combined
power and rate distributed congestion control for
vehicular communications. Computer
Communications, 93, pp.3-16.
Sepulcre, M. and Gozalvez, J., 2011, January. On the
importance of application requirements in cooperative
vehicular communications. In Eighth International
Conference on Wireless On-Demand Network Systems
and Services (WONS), 2011 (pp. 124-131). IEEE.
Sepulcre, M., Gozalvez, J., Harri, J. and Hartenstein, H.,
2011. Contextual communications congestion control
for cooperative vehicular networks. IEEE Transactions
on Wireless Communications, 10(2), pp.385-389.
Bolufé, S., Montejo-Sánchez, S., Azurdia-Meza, C. A.,
Céspedes, S., Souza, R.D. and Fernandez, E. M., 2017.
Dynamic Control of Beacon Transmission Rate with
Position Accuracy in Vehicular Networks. In
Proceedings of the III Spring School on Networks
(SSN 2017), vol. 1950, pp. 34–37.
Ortega, P., Céspedes, S., Bolufé, S., and Azurdia-Meza,
C., 2018. Experimental Evaluation of Adaptive
Beaconing for Vehicular Communications. In
Proceedings of the 6th International Workshop on
ADVANCEs in ICT infrastructures and Services,
Santiago, Chile.
Bolufé, S., Montejo-Sánchez, S., Azurdia-Meza, C.A.,
Céspedes, S., Souza, R.D. and Fernandez, E.M., 2018.
Dynamic Control of Beacon Transmission Rate and
Power with Position Error Constraint in Cooperative
Vehicular Networks. In Proceedings of the 33rd
ACM/SIGAPP Symposium On Applied Computing,
ACM SAC Conference 2018 (SAC’18), Pau, France.
Reis, A. B., Sargento, S., Neves, F. and Tonguz, O. K.,
2014. Deploying roadside units in sparse vehicular
networks: What really works and what does not. IEEE
Transactions on Vehicular Technology, 63(6),
pp.2794-2806.
Talbi, E. G., 2009. Metaheuristics: from design to
implementation (Vol. 74). John Wiley & Sons.
Bordón, R., Montejo-Sánchez, S., Fernandez, E.M.,
Souza, R. D. and Alves, H., 2014, June. Genetic
algorithm aided transmit power control in cognitive
radio networks. In 9th International Conference on
Cognitive Radio Oriented Wireless Networks and
Communications (CROWNCOM). (pp. 61-66). IEEE.
Galaviz-Mosqueda, A., Villarreal-Reyes, S., Galeana-
Zapien, H., Rubio-Loyola, J. and Rivera-Rodriguez,
R., 2016. Genetic tuning of fuzzy rule-based systems
for multi-hop broadcast protocols for VANETs.
Telecommunication Systems, 63(3), pp.399-420.
Dorronsoro, B., Ruiz, P., Danoy, G., Bouvry, P. and
Tardón, L., 2009, May. Towards connectivity
improvement in VANETs using bypass links. In
Congress on Evolutionary Computation, CEC'09. (pp.
2201-2208). IEEE.
Seredynski, M., Danoy, G., Tabatabaei, M., Bouvry, P.
and Pigné, Y., 2012, June. Generation of realistic
mobility for vanets using genetic algorithms. In
Congress on Evolutionary Computation (CEC), (pp. 1-
8). IEEE.
Toutouh, J., García-Nieto, J. and Alba, E., 2012.
Intelligent OLSR routing protocol optimization for
VANETs. IEEE transactions on vehicular technology,
61(4), pp.1884-1894.
Jafer, M., Khan, M.A., Rehman, S.U. and Zia, T.A., 2016.
Optimizing Broadcasting Scheme for VANETs Using
Genetic Algorithm. In 41st Conference on Local
Computer Networks Workshops (LCN Workshops).
(pp. 222-229). IEEE.
Jafer, M., Khan, M. A., Rehman, S. U., and Zia, T. A.,
2017. Broadcasting under Highway Environment in
VANETs Using Genetic Algorithm, In IEEE 85th
Vehicular Technology Conference (VTC Spring). pp.
1-5. IEEE.
D. G. Reina, P. Ruiz, R. Ciobanu, S. L. Toral, B., 2016
Dorronsoro, and C. Dobre, A Survey on the
Application of Evolutionary Algorithms for Mobile
Multihop Ad Hoc Network Optimization Problems.
International Journal of Distributed Sensor Networks.
D. G. Reina, S. L. Toral Marín, P. Johnson, and F.
Barrero, “An evolutionary computation approach for
designing mobile ad hoc networks,” Expert Systems
with Applications, vol. 39, no. 8, pp. 6838–6845,
2012.
O. Dengiz, A. Konak, and A. E. Smith, “Connectivity
management in mobile ad hoc networks using particle
swarm optimization,” Ad Hoc Networks, vol. 9, no.
7,pp. 1312–1326, 2011.
Goldberg, D. E., & Holland, J. H. (1988). Genetic
algorithms and machine learning. Machine
learning, 3(2), 95-99.
Towards Intelligent Tuning of Frequency and Transmission Power Adjustment in Beacon-based Ad-Hoc Networks
655

APPENDIX I. GLOSSARY OF
ACRONYMS
Channel Busy Ratio (CBR)
Dedicated Short-Range Communication (DSRC)
Dynamic Control of Beacon Transmission Rate and
Power (DC-BTR&P)
European Telecommunications Standards Institute
(ETSI)
Evolutionary Algorithm (EA)
Genetic Algorithm (GA)
Genetic Algorithm-based Transmission Rate and
Power (GA-BTR&P)
Global Positioning System (GPS)
Local Dynamic Map (LDM)
Mobile Ad-hoc Networks (MANETs)
On-Board Units (OBUs)
Physical Layer (PHY)
Road Side Units (RSUs)
Transmission Frequency (Ftx)
Transmission Power (Ptx)
Vehicle-to-Infrastructure (V2I)
Vehicle-to-Vehicle (V2V)
Vehicular Ad-hoc Networks (VANETS)
Wireless Access in Vehicular Environments
(WAVE)
RESIST 2018 - Special Session on Resilient Smart city Transportation
656
