
Nonlinear Design of Model Predictive Control
Adapted for Industrial Articulated Robots
Kv
ˇ
etoslav Belda
Department of Adaptive Systems,
The Czech Academy of Sciences, Institute of Information Theory and Automation,
Pod Vod
´
arenskou v
ˇ
e
ˇ
z
´
ı 4, 182 08 Prague 8, Czech Republic
Keywords:
Discrete Model Predictive Control, Nonlinear Design, Lagrange Equations, Articulated Robots.
Abstract:
This paper introduces a specific nonlinear design of the discrete model predictive control based on the features
of linear methods used for the numerical solution of ordinary differential equations. The design is intended
for motion control of robotic or mechatronic systems that are usually described by nonlinear differential equa-
tions up to the second order. For the control design, the explicit linear multi-step methods are considered.
The proposed way enables the design to apply nonlinear model to the construction of equations of predictions
used in predictive control. An example of behavior of proposed versus linear predictive control is demonstrated
by a comparative simulation with nonlinear mathematical model of six-axis articulated robot.
1 INTRODUCTION
The number of industrial robots increases steadily.
Such trend proceeds with the advent of Industry 4.0
also in the immediate future (Colombo et al., 2016).
The robots in industrial production perform thou-
sands of operations. Their efficiency depends highly
on the adequate motion control that can employ avai-
lable pieces of information from user and real data
(Chung et al., 2016).
Nowadays, necessary information, data and com-
puting power are broadly available, however, the de-
signers have to combine them effectively. In indus-
trial production, there exist a lot of elaborated strate-
gies that follow from long-term, empirical experien-
ces (SPS IPC Drives, 2017). Unfortunately, such stra-
tegies are usually not universal enough. They are not
scalable or simply transferable for general use in dif-
ferent or modified systems.
From mathematical point of view, the robots, ma-
nipulators, such as a mechanical structure of articu-
lated robot class depicted in Fig. 1, represent dyn-
amic systems that are usually described by systems
of ordinary differential equations (ODEs) forming
appropriate dynamic models (Siciliano et al., 2009).
Such models can be considered as a proper substitu-
tion of the real physical robot mechanism for com-
puter simulations and motion control design as well.
The mentioned systems of ODEs, include vari-
ous relations among individual elements of the ro-
bot constructions. These relations tend to be non-
linear due to the presence of nonlinear operations
on descriptive variables and their appropriate deri-
vatives such as multiplication, division, goniometric
functions etc. (Arimoto, 1996). Thus, conventional
linear control theory (Wang, 2009) cannot be directly
exploited without modifications.
axis y
0
0
0.1
0.2
0.3
-0.2
0.4
0.5
0.6
0
0.6
0.5
0.2
0.4
0.3
0.2
0.1
axis
z
0
0
axis x
0
Figure 1: Wire-frame model of the articulated robot class.
Belda, K.
Nonlinear Design of Model Predictive Control Adapted for Industrial Articulated Robots.
DOI: 10.5220/0006833500710080
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 2, pages 71-80
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
71

In engineering practice, there exist several usual
solutions. They are based on local linearization (Os-
tafew et al., 2016) by means of Taylor series, par-
tial derivative models or switching local linear models
with an inclusion of discretization to obtain discrete
linear-like model, often in state-space form. Then,
usual linear design of discrete model predictive con-
trol can be applied (Ordis and Clarke, 1993; Macie-
jowski, 2002; Wang, 2009; Belda et al., 2007; Belda
and Vo
ˇ
smik, 2016; Belda and Rovn
´
y, 2017). Succee-
ding approaches use linear models with stochastic un-
certainties substituting locally initial nonlinear model
(Kothare et al., 1996). Other solutions can be realized
by neural network (Negri et al., 2017) or by the di-
rect nonlinear optimization such as in (Kirches, 2011;
Houska et al., 2011; Wilson et al., 2016; Faulwasser
et al., 2017; Zanelli et al., 2017). However, they do
not represent immediately applicable, straightforward
multi-step design in each time-instant of the control
process.
This paper introduces a novel way of the design
of the discrete model predictive control that howe-
ver employs a continuous-time nonlinear ODE model
of the robot dynamics. The model is employed di-
rectly by means of specifically adapted explicit linear
multi-step numerical methods without any lineariza-
ton and conventional model discretization. The nume-
rical methods are used for the construction of equati-
ons of predictions. These equations can be involved
in usual way to the regular quadratic cost function
and optimization criterion. The explanation is intro-
duced with Adams-Bashforth method as a representa-
tive of the aforementioned explicit methods (Butcher,
2016). A summary of the features of the proposed so-
lution is involved including its comparison with usual
linear design of model predictive control (Ordis and
Clarke, 1993; Wang, 2009) considering conventio-
nal repeated linearization and discretization in com-
pliance with the robot motion.
2 NONLINEAR ROBOT MODEL
The model of the considered class “articulated robots”
is generally represented by a nonlinear function des-
cribing relations between control actions (robot in-
puts, joint torques τ = τ (t)) and descriptive varia-
bles (robot outputs, joint angles and their derivatives
q = q(t), ˙q = ˙q(t) and ¨q = ¨q(t)):
¨q = f(q, ˙q, τ) (1)
The model (1) represents equations of motions (Sici-
liano et al., 2009; Othman et al., 2015) that describe
robot dynamics.
Such a model is mostly composed by Lagrange
equations, e.g. in the following form
d
dt
∂E
k
∂ ˙q
T
−
∂E
k
∂q
T
+
∂E
p
∂q
T
= τ (2)
where q, ˙q, E
k
, E
p
and τ are generalized coordina-
tes and their appropriate derivatives, total kinetic and
potential energy and vector of generalized force ef-
fects associated with generalized coordinates (Sicili-
ano et al., 2009).
The individual terms in the equation system (2)
can be defined as follows
d
dt
∂E
k
∂ ˙q
T
=
˜
H(q, ˙q) ˙q + H(q) ¨q (3)
−
∂E
k
∂q
T
= S(q, ˙q) ˙q −
1
2
˜
H(q, ˙q) ˙q (4)
∂E
p
∂q
T
= g(q) (5)
where, considering simplified notation, the matrices
H =H(q), S = S(q, ˙q) and
˜
H =
˜
H(q, ˙q) =
d
dt
(H(q))
relate to inertia effects and vector g = g(q) corre-
sponds to effects of gravity. Thereafter, the model
(equations of motion of articulated robots) can be de-
fined as follows
¨q =
f(q, ˙q, τ )
z }| {
−H
−1
1
2
˜
H + S
˙q
| {z }
f(q, ˙q)
− H
−1
g
| {z }
f
g
(q)
| {z }
f
c
(q, ˙q)
+ H
−1
τ
| {z }
g
τ
(q) τ
= f (q, ˙q) + u (6)
where the terms f (q, ˙q) = −H
−1
1
2
˜
H + S
˙q
and u = H
−1
(−g + τ).
Thus, equation (6) can be introduced as a particu-
lar expression of the model (1) as follows
¨q = f
c
(q, ˙q) + g
τ
(q) τ = f (q, ˙q) + f
g
(q) + g
τ
(q) τ
= f (q, ˙q) + g(q) u (7)
where g(q) is added just for the generality; it is iden-
tity matrix here. In (7), the effects of gravity f
g
(q) are
incorporated into robot inputs as outer forces consi-
dering their static and fixed character that cannot be
reduced or suppressed in the control design.
Note that final torques required on drives (refe-
rence torques for drive control) are given by
τ = H u + g (8)
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
72

3 INTEGRATION CONCEPT
To obtain discrete form of nonlinear predictive cont-
rol, let us consider individual time instants of the ini-
tial continuous nonlinear function in the model (1)
as follows (i.e. sampling, no model discretization)
f
k
= f(q, ˙q, τ )|
t = k T
s
, k = 0, 1, ··· (9)
where T
s
is suitably selected sampling period. Let us
apply the same to the terms from (7)
f
k
= f (q, ˙q) g
k
= g(q) |
t = k T
s
(10)
The statements (9) or (10) will be suitable for a speci-
fic construction of the predictions relative to unknown
control actions u(t) within finite discrete time set
t ∈ {k T
s
, (k+1) T
s
, ··· , (k+N −1) T
s
}, where N
is a prediction horizon.
The predictions still take into account the continu-
ous nonlinear model, but only in the indicated discrete
time samples for discrete design of predictive control.
Such a concept can be realised by means of numeri-
cal methods (Butcher, 2016) used for the numerical
approximation of the solution of the first-order ordi-
nary differential equations (ODEs):
˙y = f(t, y) with initial condition y
0
= y|
t = 0
(11)
Specifically, these methods are used to find a numeri-
cal approximation of the exact integral over a specific
time interval, e.g. t ∈ hk T
s
, (k+1) T
s
i
y
k+1
= y
k
+
(k+1) T
s
Z
k T
s
˙y dt = y
k
+
(k+1) T
s
Z
k T
s
f(t, y) dt
ˆy
k+1
= y
k
+ h δ(t, y) (12)
where y
k
= y|
t=k T
s
is an initial condition of the con-
sidered time interval, ˆy
k+1
is an approximation
of the exact solution y
k+1
= y|
t=(k+1) T
s
, δ(t, y) re-
presents generally the function approximating ˙y so
that ˆy
k+1
would be the adequate approximation of
y
k+1
and h is a step of integration method, which is
selected as h = T
s
.
From wide range of the methods, let us focus on
linear multi-step methods suitable for the predictions
in predictive design. Generally, linear multi-step met-
hods are defined as
ˆy
k+1
=
r
X
i=0
α
i
y
k−i
+ h
s
X
j=−1
β
j
f
k−j
(13)
where ˆy
k+1
is a result of the numerical integration
based on the previous y
k−i
.
For the design, the explicit methods are useful
such as explicit Adams-Bashforth method of fourth
order with r = 0, α
0
= 1, s = 3 and β
j
=
γ
j
24
,
j ∈ {−1, 0, 1, 2, 3}, where γ
−1
= 0, γ
0
= 55,
γ
1
= −59, γ
2
= 37 and γ
3
= −9, as follows
ˆy
k+1
= y
k
+ h ( −
9
24
f
k−3
+
37
24
f
k−2
−
59
24
f
k−1
+
55
24
f
k
) (14)
Thus, for completeness, the function approximating ˙y
from (12) is as follows:
δ(t, y) = −
9
24
f
k−3
+
37
24
f
k−2
−
59
24
f
k−1
+
55
24
f
k
.
The aforementioned Adams-Bashforth linear method
(Butcher, 2016) will be used in the next explanation
of the following section.
4 NONLINEAR DESIGN
OF PREDICTIVE CONTROL
The nonlinear model predictive design focusses re-
cently on the solution of nonlinear optimal control
problem with integral criterion of optimality. It repre-
sents general solution using sophisticated nonlinear
optimization algorithms. But it leads to sequential
quadratic programming (QP) representing one-ahead
spreading-in-time-optimization process, thus iterati-
vely approximating the nonlinear problem with QP
(Faulwasser et al., 2017; Zanelli et al., 2017). Al-
ternatively, the usual summation form of the criterion
used in linear control theory can be also taken into ac-
count. The operation of integration is just shifted
from the criterion towards predictions via continuous-
time model represented by ODEs. This idea will be
used and introduced in the proposed design.
Let us start from the continuous model (7) con-
sidered in the discrete time samples (time instants)
as was designated in (10). Moreover, let us use more
common, universal notation for outputs y instead of q,
i.e. y
k
= q
k
as well as for appropriate derivatives
˙y
k
= ˙q
k
and ¨y
k
= ¨q
k
¨y
k
= f
k
+ g
k
u
k
(15)
From (6), the function f
k
holds f
k
|
[ ˙y = 0, y ∈R)]
= 0
whereas term f
g k
|
y ∈ R
6= 0 in (7) for the conside-
red spatial articulated robot class as well as for ver-
tical planar robot configurations. For completeness,
f
g k
|
y ∈ R
= 0 applies to horizontal planar robot con-
figurations. The property of f
k
is helpful for the sta-
bility of the control design.
Using the model (15), the specific design
of the nonlinear model predictive control can be now
explained within the following three sections.
Nonlinear Design of Model Predictive Control Adapted for Industrial Articulated Robots
73

4.1 Criterion and Cost Function
The criterion for predictive control design can gene-
rally be written as follows
min
U
k
J
k
(
ˆ
Y
k+1
, W
k+1
, U
k
)
(16)
subject to:
ˆ
Y
k+1
= f (y
k
, ˙y
k
, δ(t, y, ˙y))
¨y
k
= f
k
+ g
k
u
k
where δ(t, y, ˙y) follows from the second order model
¨y
k
= f
k
+ g
k
u
k
, where f
k
= f (y, ˙y) as in (10).
ˆ
Y
k+1
, W
k+1
and U
k
stand for the sequences
of the robot output predictions, references and cont-
rol actions, respectively
ˆ
Y
k+1
= [ˆy
T
k+1
, ··· , ˆy
T
k+N
]
T
(17)
W
k+1
= [w
T
k+1
, ··· , w
T
k+N
]
T
(18)
U
k
= [u
T
k
, ··· , u
T
k+N −1
]
T
(19)
Then the cost function J
k
is selected in common
quadratic form as follows
J
k
=
N
X
i=1
{||Q
yw
(ˆy
k+i
− w
k+i
)||
2
2
+ ||Q
u
u
k+i−1
||
2
2
}
=(
ˆ
Y
k+1
− W
k+1
)
T
Q
T
Y W
Q
Y W
(
ˆ
Y
k+1
− W
k+1
)
+ U
T
k
Q
T
U
Q
U
U
k
(20)
where Q
T
Y W
Q
Y W
and Q
T
U
Q
U
are penalizations
defined as
Q
T
Q
=
Q
T
∗
Q
∗
0
.
.
.
0 Q
T
∗
Q
∗
(21)
where the symbolic subscripts
, ∗ have the following
interpretation: ∈ {Y W, U} and ∗ ∈ {yw, u}.
However, the function can be selected variously
according to user requirements, e.g. considering
incremental terms that can slightly moderate
and smooth the robot motion (Maciejowski, 2002)
or suppress steady-state control error (Wang, 2009;
Belda and Z
´
ada, 2017).
4.2 Equations of Predictions
As was already mentioned, the equations of predicti-
ons will be composed with the nonlinear continu-
ous model (15) and by means of the idea of the ap-
proximation of the exact integral as indicated in (12)
by the exemplarily selected linear multi-step Adams-
Bashforth method of fourth order (14) for the solution
of the first-order ODEs.
However, the nonlinear model of the robot (15) re-
presents a system of the second-order ODEs. To ap-
ply the selected suitable numerical method, but wit-
hout lost of information about included nonlinear re-
lations, the model (15) has to be specifically rearran-
ged into ODEs of the first order. For the necessary re-
arrangement, the following backward Euler formula
can be selected for simplicity
ˆ
˙y
k+1
=
ˆy
k+1
− y
k
h
(22)
The used formula ensures coupling (propagation)
of nonlinear relations from (15) into positional esti-
mates, since the numerical methods represent only li-
near combinations within rows of the ODEs. Thus,
usual rearrangement via addition of further ODEs de-
creasing the order of initial ODE system would not be
helpful.
Taking the aforementioned features into account,
then the positional estimate ˆy
k+1
can be evaluated
by the velocity estimate
ˆ
˙y
k+1
, which includes fully
the initial nonlinear model (15), as follows
ˆy
k+1
= y
k
+ h
ˆ
˙y
k+1
(23)
where the estimate
ˆ
˙y
k+1
is given generally by the nu-
merical integration of the ODE set as follows
ˆ
˙y
k+1
= ˙y
k
+ h δ(t, y, ˙y) (24)
Note, for completeness, if the appropriate robot
model would be set of first-order ODEs only, i.e.
˜
˙y
k
=
˜
f
k
+ ˜g
k
u
k
as e.g. in (Groothuis et al., 2017; Z
´
ada and Belda,
2017), this step is omitted.
Now, the pure equations of predictions can
be composed considering the model (15), a spe-
cific numerical method (24) (here, the Adams-
Bashworth (14) is selected) and the rearrangement
to the first-order ODE set as indicated by (23).
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
74

The equations of predictions in a matrix form are
defined for the velocity vector
ˆ
˙
Y
k
as follows
ˆ
˙
Y
k+1
= ˙y
k
F
I
+ F
k
+ G
k
U
k
(25)
and as well as for the position vector
ˆ
˙
Y
k
as
ˆ
Y
k+1
= y
k
F
I
+ L
k
+ M
k
U
k
(26)
where the individual terms represent multiple identity
matrix: F
I
= [ I ···I ]
T
, specific free responses:
“ ˙y
k
F
I
+F
k
”, “ y
k
F
I
+L
k
” and forced responses:
“ G
k
U
k
”, “ M
k
U
k
”, respectively.
F
k
and G
k
can be derived from the following sequen-
ces for velocities, where, for clarity, individual time
steps are separated by horizontal lines:
ˆ
˙y
k+1
= ˙y
k
+ F
1,k
+ β
0
g
k
u
k
F
1,k
= β
3
¨y
k−3
+ β
2
¨y
k−2
+ β
1
¨y
k−1
+ β
0
f
k
ˆ
˙y
k+2
= ˙y
k
+ F
2,k
+ (β
1
+ β
0
) g
k
u
k
+ β
0
ˆg
k+1
u
k+1
F
2,k
=F
1,k
+β
3
¨y
k−2
+β
2
¨y
k−1
+β
1
f
k
+β
0
ˆ
f
k+1
.
.
.
ˆ
˙y
k+N
= ˙y
k
+F
N,k
+ {
3
X
j=0
β
j
}g
k
u
k
+ ··· + β
0
ˆg
k+N −1
u
k+N −1
F
N,k
= F
N−1,k
+
4
X
j=1
β
j−1
ˆ
f
k+N−j
(27)
Note that in step k, the topical value ˙y
k
as well as
its appropriate past values ˙y
k−1
, ˙y
k−2
and ˙y
k−3
are
known from measurements or some state estimation.
Consequently, vector F
k
from (25) can be defined
in the following way:
F
k
=
F
1, k
F
2, k
.
.
.
F
N, k
(28)
Similarly, the matrix G
k
from (25) is defined as
G
k
=
β
0
g
k
0 ··· 0
(β
1
+ β
0
) g
k
β
0
ˆg
k+1
.
.
.
.
.
.
.
.
.
.
.
.
{
3
P
j=0
β
j
}g
k
··· ··· β
0
ˆg
k+N −1
(29)
where
ˆ
f
k+i
and ˆg
k+i
can be substituted by fu-
ture reference values as
ˆ
f
k+i
= f
k+i
(w
k+i
, ˙w
k+i
)
and ˆg
k+i
= g
k+i
(w
k+i
).
Similarly in the construction of the equations (26),
ˆ
Y
k+1
, L
k
and M
k
can be defined by analogical se-
quences for positions as follows (again for clarity, in-
dividual time steps are separated by horizontal lines):
ˆy
k+1
= y
k
+ L
1, k
+ h β
0
g
k
u
k
L
1, k
= h ˙y
k
+ h F
1, k
ˆy
k+2
= y
k
+ L
2, k
+h (β
1
+ 2 β
0
) g
k
u
k
+h β
0
ˆg
k+1
u
k+1
L
2, k
= L
1, k
+ h F
2, k
.
.
.
ˆy
k+N
= y
k
+ L
N, k
+ h {
3
X
j=0
(N−j)β
j
}g
k
u
k
+ ··· + hβ
0
ˆg
k+N −1
u
k+N −1
L
N, k
= L
N−1, k
+ h F
N, k
(30)
Then, vector L
k
and matrix M
k
from (26) are:
L
k
=
L
1, k
L
2, k
.
.
.
L
N, k
(31)
M
k
=
h β
0
g
k
0 ··· 0
h (β
1
+2 β
0
) g
k
h β
0
ˆg
k+1
.
.
.
.
.
.
.
.
.
.
.
.
h{
3
P
j=0
(N−j)β
j
}g
k
··· ··· h β
0
ˆg
k+N −1
(32)
Note that due to second order ODEs, the two-step
equations of predictions (25) and (26) are used here.
Nonlinear Design of Model Predictive Control Adapted for Industrial Articulated Robots
75
4.3 Square-root Minimization
To minimize cost function (20), let us consider the fol-
lowing expression
min
U
k
J
k
= min
U
k
J
T
k
J
k
⇒ min
U
k
J
k
(33)
indicating the square-root minimization of the vec-
tor J
k
instead of minimization of the scalar J
k
,
where the square-root minimization is more suitable
from computation point of view. Thus, the square-
root of the criterion (16) with the cost function (20)
is as follows
min
U
k
J
k
= min
U
k
Q
Y W
0
0 Q
U
ˆ
Y
k+1
− W
k+1
U
k
(34)
which can be solved as a specific least-square pro-
blem by the following system of algebraic equations
(Lawson and Hanson, 1995) that involves equations
of predictions (26) for
ˆ
Y
k+1
Q
Y W
M
k
Q
U
U
k
=
Q
Y W
(W
k+1
−y
k
F
I
−L
k
)
0
(35)
The system (35), that is over-determined, can
be written in condensed general form (36). This
form can be transformed to another form (37)
by orthogonal-triangular decomposition (Lawson and
Hanson, 1995) and solved for unknown U
k
AU
k
= b (36)
Q
T
AU
k
= Q
T
b assuming that A = Q R
R
1
U
k
= c
1
(37)
where Q
T
is an orthogonal matrix that transforms ma-
trix A into upper triangle R
1
as indicated
A
U
k
=
b
⇒
@
@
@
@
R
1
0
U
k
=
c
1
c
z
(38)
Vector c
z
represents a loss vector, Euclidean norm
||c
z
|| of which equals to the square-root of the op-
timal cost function minimum, scalar value
√
J
i.e. J = c
T
z
c
z
. Only the first elements corresponding
to u
k
are selected from computed vector U
k
.
5 SIMULATION EXAMPLE
The example demonstrates the behavior of the articu-
lated robot along selected testing trajectory. The cor-
responding wire-frame model including trajectory
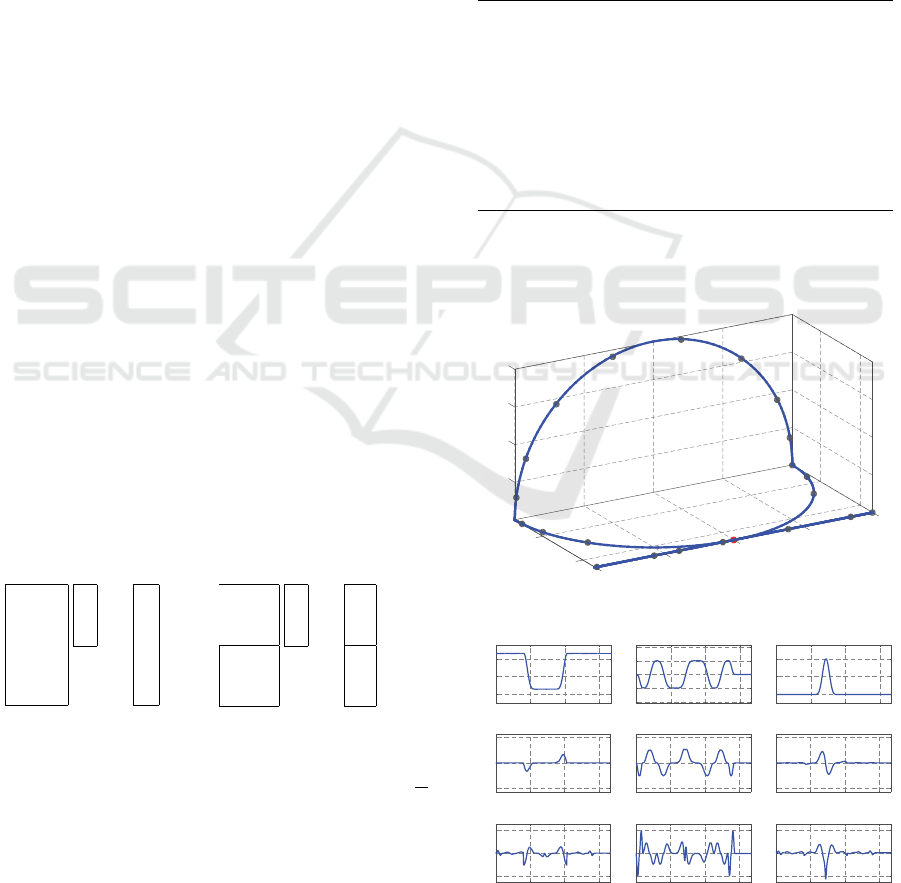
is shown in Fig. 1. Trajectory in detail is in Fig. 2
and Fig. 3.
The depicted trajectory in Fig. 1 was time para-
meterized with acceleration polynomial of fifth-order
(Siciliano et al., 2009; Belda and Novotn
´
y, 2012).
The specification of individual trajectory segments is
listed in the Table 1
Table 1: Testing trajectory in G code (mm).
001: N010 G19
002: N020 G00 X630 Y-200 Z400
003: N030 G00 X630 Y200 Z400
004: N040 G00 X630 Y0 Z400
005: N050 G02 X430 Y-200 Z400 I-200 J0 K0
006: N060 G02 X430 Y200 Z400 I0 J200 K0
007: N070 G02 X630 Y0 Z400 I0 J-200 K0
008: N080 G00 X630 Y-200 Z400
009: N090 G00 X630 Y200 Z400
010: N010 G00 X630 Y0 Z400
where G19, G00 and G02 are commands for plane se-
lection, linear and circular interpolation, respectively.
Figure 2: Testing trajectory with specific time marks.
Figure 3: Cartesian coordinates and derivatives (time in (s)).
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
76

q
D[LV
q
D[LV
q
D[LV
q
D[LV
x
e
y
e
z
e
D
z
e
E
y
e
H
x
e
E =
q
D[LV
q
D[LV
q
D[LV
q
D[LV
q
D[LV
q
D[LV
q
D[LV
q
D[LV
Figure 4: Six-axis multipurpose ABB robot IRB 140.
The used dynamic model (7) and (8) from (2)-(6)
had parameters of ABB robot IRB 140 (Fig. 4).
The number of actuated (driven) axes of the ro-
bot is six as well as a number of degrees of freedom
of the robot. Six degrees of freedom correspond to six
inputs: torques τ
1:6
(N·m), six outputs: joint coordi-
nates y = q
1:6
(rad) relating to the appropriate Car-
tesian coordinates:
E = [ {x
e
, y
e
, z
e
(m)}, {α
z
e
, β
y
e
, γ
x
e
(rad) }]
T
and twelve state variables:
x = [ q
T
1:6
(rad), ˙q
T
1:6
(rad ·s
−1
) ]
T
corresponding to joint coordinates and their appropri-
ate derivatives.
Note that end-effector was oriented to be parallel
with axis x
0
. Thus, the orientation angles are consi-
dered to be constant:
α
z
e
= β
y
e
= γ
x
e
= 0 rad
However, corresponding reference values in joint
space w
1:6,∀k
, k = 1, 2, ··· , are changing accor-
ding to appropriate kinematic transformation specific
for considered robot.
5.1 Simulation Setup
Proposed nonlinear design of model predictive cont-
rol (NdMPC) was tested with the following parame-
ters:
- sampling period: T s = 0.01s
- horizon of prediction: N = 10
- output penalization: Q
yw
= I
(6×6)
- input penalization: Q
u
= 2 · 10
−4
I
(6×6)
where I is the identity matrix.
The proposed algorithm was compared with regular
model predictive control (MPC) (Wang, 2009) having
identical setting. The MPC, used for the comparison,
was as follows
U
k
= (
˜
G
T
k
Q
T
Y W
Q
Y W
˜
G
k
+ Q
T
U
Q
U
)
−1
×
˜
G
T
k
Q
T
Y W
Q
Y W
(W
k+1
−
˜
F
k
x
k
)
(39)
where matrices
˜
F and
˜
G are derived from the initial
nonlinear model (7) as follows
˜
F
k
=
CA
k
.
.
.
CA
N
k
˜
G
k
=
CB
k
··· 0
.
.
.
.
.
.
.
.
.
CA
N−1
k
B
k
··· CB
k
(40)
Linear-like matrices A
k
and B
k
, involved in (40),
are obtained conventionally by model linearization
and discretization repeating in every time instant k.
C is an output matrix. All terms follow from state-
space form:
˙y
¨y
| {z }
˙x
=
0 I
0 f( ˙y, y)
| {z }
A(t)
y
˙y
| {z }
x
+
0
I
| {z }
B
u (41)
y =
I 0
| {z }
C
y
˙y
(42)
that is discretized: A(t), B |
T
s
⇒ A
k
, B
k
by first-
order-hold method (Franklin et al., 1998) and arran-
ged as
y
k+1
= C A
k
x
k
+ C B
k
u
k
(43)
The details on used MPC can be found e.g. in (Ordis
and Clarke, 1993; Wang, 2009).
5.2 Summary of the Results
The simulation was performed with the mentioned
setting and with artificially added mismatch between
the model used for the control design and the mo-
del for simulation. The mismatch consisted in the
four-times increased weight of the last, 6
th
robot link
in the simulation model against model for the design,
i.e. m
6
= 0.25kg and ˜m
6
= 4×m
6
.
Nonlinear Design of Model Predictive Control Adapted for Industrial Articulated Robots
77

Å-0# Å.d-0#
Figure 5: Time histories of errors in the axis x.
Å-0#
Å.d-0#
Figure 6: Time histories of errors in the axis y.
Å-0# Å.d-0#
Figure 7: Time histories of errors in the axis z.
The Fig.5 - Fig.7 show control errors at the ro-
bot motion along the testing trajectory. They represent
the errors in Cartesian coordinate system. The values
of the appropriate Cartesian coordinates were recom-
puted from ‘measured’ values of joint coordinates.
The corresponding errors in the joint space
for the most exposed joints q
2
and q
3
to load are
shown in Fig. 8 and Fig. 9. The exposition is caused
by the robot motion itself, thus its character across
the symmetry plane x
0
z
0
|
y
0
= 0
. The mentioned
figures show the lower tracking errors for the pro-
posed method. Considering moving-mass distribu-
tion in the robot: m
1
= 35 kg, m
2
= 16 kg,
m
3
= 14 kg, m
4
= 6 kg, m
5
= 0.75kg
and m
6
= 0.25kg, then the highest vertical load
is on 2
nd
link between joints q
2
and q
3
, which is ac-
-0#
Å.d-0#
Figure 8: Time histories of control error for joint q
2
.
-0#
Å.D-0#
Figure 9: Time histories of control error for joint q
3
.
tuated in joint q
2
.
For the selected trajectory or its orientation,
the joint q
2
together with joint q
3
influence domi-
nantly the motion in the direction parallel to axis x
0
and axis z
0
whereas joint q
1
(rotation around axis z
0
)
influences motion in the direction of axis y
0
, espe-
cially if the motion trajectory leads in specific robot
orientation through the mentioned vertical symmetry
plane x
0
z
0
|
y
0
= 0
.
Since the both proposed NdMPC and regular
MPC design have positional character, then spe-
cific steady-state errors are noticed. This is es-
pecially obvious for the vertical axis z (Fig. 7)
and a bit less for the horizontal axis x (Fig. 5),
which is coupled with the joints serving predomi-
nantly for the axis z, i.e. joints q
2
and q
3
.
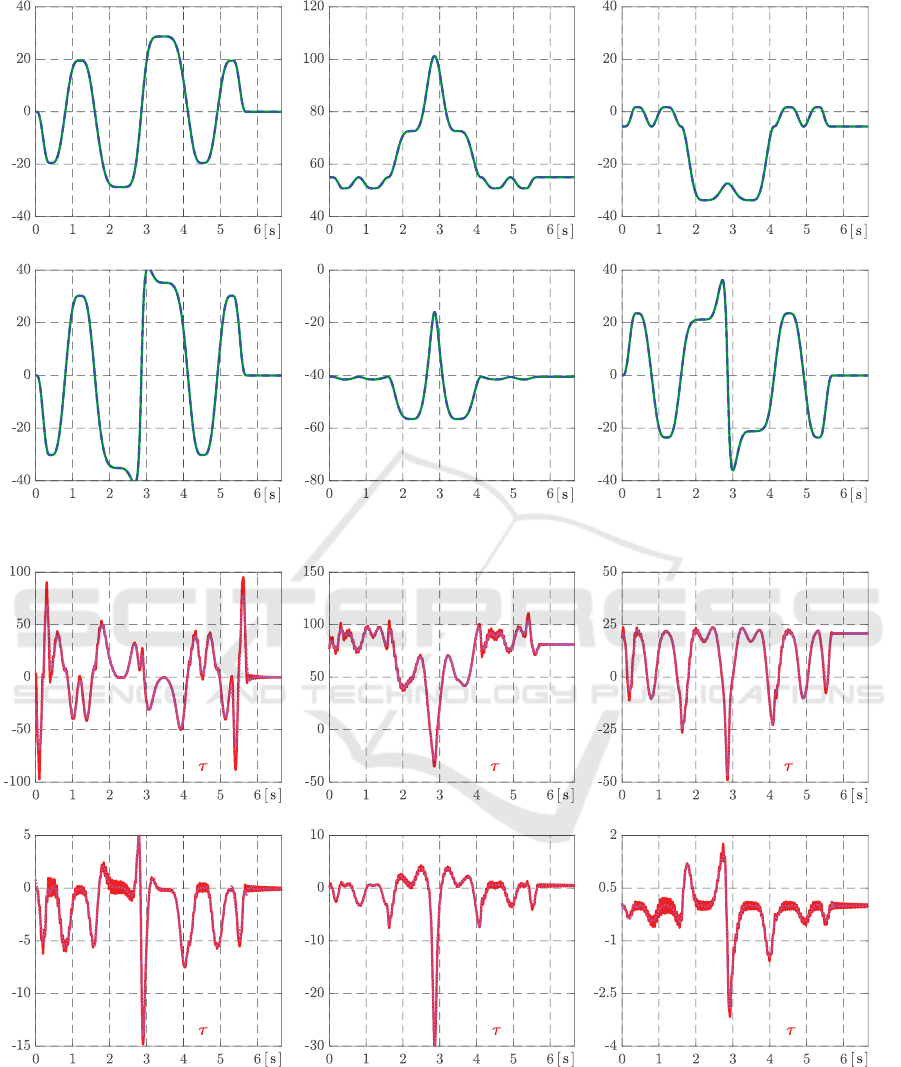
The Fig. 10 shows joint coordinates q
i
correspon-
ding to cartesian coordinates in Fig. 3. It is evi-
dent that the most difficult motion phase is around
2.9 s, because the robot arms and end-effector are
in full motion speed and the trajectory decomposed
into the individual joint angles changes rapidly.
Fig. 11 shows corresponding situation in desig-
ned control actions τ
i
generated during control pro-
cess. Such rapid turn or change cause changes
in the model parameters, which cannot be expres-
sed with one linearized model (41) fixed within re-
spective moving time intervals at standard design (39)
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
78
q
t >@
q
G
tq
t >@
q
G
t
q
t >@
q
G
t
q
t >@
q
G
t
q
t >@
q
G
t
q
t >@q
G
t
Figure 10: Time histories of joint coordinates q
i
and their references q
id
: generalized coordinates q
i(·)
, i = 1, · · · , 6 .
t
>1P@
t
>1P@
t
>1P@
t
>1P@
t
>1P@
t
>1P@
Figure 11: Time histories of control actions: joint torques τ
i
, i = 1, · · · , 6 .
instead of varying nonlinear model along the same
time intervals at proposed nonlinear design based
on equations of predictions (25) and (26).
6 CONCLUSION
The proposed nonlinear design introduces specific
direct use of initial nonlinear continuous model wit-
Nonlinear Design of Model Predictive Control Adapted for Industrial Articulated Robots
79

hout any linearizaton and conventional model dis-
cretization. The introduced NdMPC can consider re-
asonable prediction horizon as regular MPC. Furt-
her emphasis will be placed on the selection analy-
sis of adequate numerical method, incremental offset-
free form and on a general point-to-point motion
in unconstrained and constrained robot workspace.
ACKNOWLEDGEMENT
This paper was supported by The Czech Academy of
Sciences, Institute of Information Theory and Auto-
mation.
REFERENCES
Arimoto, S. (1996). Control Theory of Non-linear Mecha-
nical Systems. Oxford Press.
Belda, K., B
¨
ohm, J., and P
´
ı
ˇ
sa, P. (2007). Concepts of
model-based control and trajectory planning for pa-
rallel robots. In Proc. of the 13th IASTED Int. Conf.
on Robotics and Applications, pages 15–20.
Belda, K. and Novotn
´
y, P. (2012). Path simulator for ma-
chine tools and robots. In Proc. of MMAR IEEE Int.
Conf., pages 373–378, Poland.
Belda, K. and Rovn
´
y, O. (2017). Predictive control of 5
DOF robot arm of autonomous mobile robotic system
motion control employing mathematical model of the
robot arm dynamics. In 21st Int.Conf. on Process Con-
trol, pages 339–344.
Belda, K. and Vo
ˇ
smik, D. (2016). Explicit generalized pre-
dictive control of speed and position of PMSM drives.
IEEE Trns. Ind. Electron., 63(2):3889–3896.
Belda, K. and Z
´
ada, V. (2017). Predictive control for offset-
free motion of industrial articulated robots. In Proc.
of MMAR IEEE Int. Conf., pages 688–693, Poland.
Butcher, J. (2016). Numerical Methods for Ordinary Diffe-
rential Equations. Wiley.
Chung, W., Fu, L., and Kr
¨
oger, T. (2016). Motion Control,
pages 163–194. Springer.
Colombo, A. W., Karnouskos, S., Shi, Y., Yin, S., and
Kaynak, O. (2016). Industrial cyber-physical systems
scanning the issue. Proc. of the IEEE, 104(5):899–
903.
Faulwasser, T., Weber, T., Zometa, P., and Findeisen, R.
(2017). Implementation of nonlinear model predictive
path-following control for an industrial robot. IEEE
Tran. Control Syst. Technology, 25(4):1505–1511.
Franklin, G., Powell, J., and Workman, M. (1998). Digi-
tal Control of Dynamic Systems (3rd ed.). Addison
Wesley.
Groothuis, S., Stramigioli, S., and Carloni, R. (2017).
Modeling robotic manipulators powered by varia-
ble stiffness actuators: A graph-theoretic and port-
hamiltonian formalism. IEEE Trans. on Robotics,
33(4):807–818.
Houska, B., Ferreau, H., and Diehl, M. (2011). ACADO
toolkit – An open-source framework for automatic
control and dynamic optimization. Optimal Control
Applications and Methods, 32(3):298–312.
Kirches, C. (2011). Fast numerical methods for mixed-
integer nonlinear model-predictive control. Springer.
Kothare, M. V., Balakrishnan, V., and Morari, M.
(1996). Robust constrained model predictive con-
trol using linear matrix inequalities. Automatica,
32(10):13611379.
Lawson, C. and Hanson, R. (1995). Solving least squares
problems. Siam.
Maciejowski, J. (2002). Predictive Control: With Con-
straints. Prentice Hall.
Negri, G. H., Cavalca, M. S. M., and Celeberto, A. L.
(2017). Neural nonlinear model-based predictive con-
trol with faul tolerance characteristics applied to a ro-
bot manipulator. Int. J. Innovative Computing Infom-
ration and Control, 13(6):1981–1992.
Ordis, A. and Clarke, D. (1993). A state-space descrip-
tion for GPC controllers. J. Systems SCI., 24(9):1727–
1744.
Ostafew, C. J., Schoellig, A. P., Barfoot, T. D., and Col-
lier, J. (2016). Learning-based nonlinear model pre-
dictive control to improve vision-based mobile robot
path tracking. J. Field Robotics, 33(1):133–152.
Othman, A., Belda, K., and Burget, P. (2015). Physical mo-
delling of energy consumption of industrial articulated
robots. In Proc. of the 15th Int. Conf. on Control, Au-
tomation and Systems, pages 784–789, Korea. ICROS.
Siciliano, B., Sciavicco, L., Villani, L., and Oriolo, G.
(2009). Robotics – Modelling, Planning and Control.
Springer.
SPS IPC Drives (2017). Internationale fachmesse f
¨
ur elek-
trische automatisierung, systeme und komponenten.
Online: < https://www.mesago.de/en/SPS/ >.
Wang, L. (2009). Model Predictive Control System Design
and Implementation Using MATLAB. Springer.
Wilson, J., Charest, M., and Dubay, R. (2016). Non-
linear model predictive control schemes with applica-
tion on a 2 link vertical robot manipulator. Robotics
and Computer-Integrated Manufacturing, 41:23–30.
Z
´
ada, V. and Belda, K. (2017). Application of hamiltonian
mechanics to control design for industrial robotic ma-
nipulators. In Proc. of MMAR IEEE Int. Conf., pages
390–395, Poland.
Zanelli, A., Domahidi, A., Jerez, J., and Morari, M.
(2017). FORCES NLP: an efficient implementation
of interior-point methods for multistage nonlinear
nonconvex programs. Int. J. Control, pages 1–17.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
80
