
Target Acquisition Systems
Suitability Assessment based on Joint Fires Observer Mission Criteria
Determination
Ivan Jan, Silinger Karel and Potuzak Ladislav
Department of Fire Support,University of Defence, Czech Republic
Keywords: Artillery, Joint Fires Observer, Laser Pointer, Laser Rangefinder, Magnetic Orientation, Night Vision,
Target Acquisition System, Thermal Imaging, True North Finder.
Abstract: Article focuses on the artillery target acquisition systems in the context of properties required for the
operations of joint fires observers (JFO). The aim of the article is to determine the optimal type (variant) of
the target acquisition system for equipping the joint fires observers. The choice of the optimal type (variant)
is based on the evaluation of properties of the currently employed artillery target acquisition systems in the
Czech Army in relation to the requirements for operation of the joint fires observers. The partial objective of
the article is to illustrate, using decision criteria, the requirements for the artillery target acquisition systems
in accordance with the activities of joint fires observer. Additionally, the need for shift from magnetic
orientation to gyroscopic orientation is highlited and illustrated by the experiment conducted during the
assesment. The result of the article is the selection of the optimal type (variant) of target acquisition system
for joint fires observer in accordance to currently employed systems, so the logistics flow will remain the
same.
1 INTRODUCTION
Despite the significant technological development of
artillery weapon systems and predictions of further
reductions in artillery numbers at the expense of
other branches, the artillery remains the key fire
support element (Šilinger, Blaha, 2017). The
findings from current conflicts clearly show the
importance and irreplaceability of artillery in the
current concept of the armed conflicts (Pikner,
Galatík, 2015).
Although the military technical systems have
achieved significant level of development, the
artillery observer remains an indispensable element
of the artillery fire control system. (Stodola, Drozd,
Křišťálová, Kozůbek, 2017). In accordance to
modern trends the cooperation of military branches
is deepened, especially within the individual
elements of firing support. (Stodola, Mazal, 2015).
Within the artillery, this trend is most evident in
ever-expanding cooperation with air support
elements. (Šilinger, Blaha, 2017). That is why the
joint fires observer (JFO) concept is introduced in
the Czech army to create a group of artillery
specialists, capable of requesting and controlling
target engagements by the elements of joint fire
support, especially by the artillery and air force.
Since cooperation with elements of joint fire
support requires specific equipment, JFOs must be
equipped with appropriate systems. (Blaha, Šilinger,
2018). Artillery target acquistion units of the Czech
Army have recently been equipped with adequate
systems, which are evaluated as the best available
means in the sensory equipment market for the
needs of artillery target acquistion (TA). For this
reason, the selection of the optimal type (variant) of
artillery target acquistion systems is based on newly
acquired types (Šilinger, Blaha, Potužák, Přikryl,
2016).
2 JOINT FIRES OBSERVER
Joint fire support is defined as the use of joint fires
to support various types of forces (airborne, naval,
ground and special) performing combat tasks. The
implementation of joint fires makes it possible to
maximize the capabilities of all elements of fire
Jan, I., Karel, S. and Ladislav, P.
Target Acquisition Systems - Suitability Assessment based on Joint Fires Observer Mission Criter ia Determination.
DOI: 10.5220/0006835203970404
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 1, pages 397-404
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
397

support available on the battlefield. (Pikner, Galatík,
2016). The advantage is the achievement of fire
supremacy over the adversary and creation of
suitable conditions for the fulfillment of tasks of
friendly forces. However, in order to achieve
maximum efficiency of joint fires, the interaction
between individual elements of the joint fire support
is crucial. This is based on the results of the planning
process, activity coordination, the timely and
flawless exchange of information (Šilinger, Blaha,
Potužák, 2017).
Joint fires are fires delivered during the
employment of forces from two or more components
in coordinated actions. It could be considered as
engagement of targets by units of field artillery, air
support and naval artillery.
Specially trained observer, who is able to
cooperate on target engagements with all joint fire
assets, realizes terminal control of joint fires. In the
framework of his activities, JFO must be able to
detect, identify and locate targets for the purpose of
joint fires assets requesting. Additionally he must be
able to control the engagements and asses battle
damage done by joint fire support assets. For these
activities, he needs specific equipment which will
enable him to provide quality, timely and accurate
information to the elements he is working with on
target engagement. The high-quality sensor systems
that the JFO is equiped withprovides are the basic
pillars of its activities. If the JFO were not equipped
with adequate sensor systems and could not provide
such information, the efficiency of joint fires would
drop substantially. (Šilinger, Blaha, 2017).
3 TARGET ACQUISITION
SYSTEMS IN THE CZECH
ARMY
Artillery target acquisition units of the Czech army
had recently been equipped with new systems. The
main objective of this modernization was to replace
obsolete artillery target acquistion systems with new
ones that allow for more precise determination of the
individual parameters as well as the technical
equipment unification with the standard in NATO
armies.
Operations of target acquisition units in the
Czech army is based primarily on the use of vehicle
platforms adapted to carry target acquisition
systems. The use of vehicle platforms for the
operation of artillery target acquistion units is a
specific feature of the Czech Armed Forces, which
has no similarity in other NATO armies.
Target acquisition systems in the Czech army are
based on vehicle platforms as well as on backup
target acquisition system sets, which are used in case
the vehicles are unfunctional. Therefore, both the
vehicle platforms and the backup sets are included in
the enumeration. In the Czech army, the following
systems of artillery target acquistion are currently in
use:
Sněžka-M;
LOS-M;
LOV-Pz;
GonioLight V w/ Vector 21 Nite;
Sterna V w/ Vector 21 Nite;
Sterna V w/ JIM LR, TLS 40.
Although capabilities of target acquisition
vehicles and backup set differ, they are, in all cases,
a full-featured means of conducting an artillery
survey.
3.1 Sněžka-M
Target acquisition system Sněžka-M is specific
system based on modified BMP-1 tracked chassis
(Modernizovaná Sněžka-M předána AČR, 2015).
This system has hydraulically protruded, three-
segmented arm, which carries a senzoric head
accommodating target acquisition devices. Senzoric
head contains these devices:
Merlin 3 daytime surveillance camera;
Merlin 2N night surveillance camera;
Falcon-200 digital camera;
THV-3000 thermal imaging camera;
Zeiss LDM 38 laser rangefinder;
Thales Squire ground surveillance radar.
The Sněžka-M is equipped with the GPS receiver
AN/PSN-13A DAGR and the inertial navigation unit
TALIN 4000 (Modernizovaná Sněžka-M předána
AČR, 2015) to determine its own position and
direction of observation of the sensor head. As a
backup target acquisition system, Sněžka-M is
equipped with Sterna V w/ Vector 21 Nite (section
3.5).
3.2 LOS-M
LOS-M (Light Observation System – Modernized)
is tracked target acquisition vehicle based on
modified BMP-1 chassis. It is the same chassis used
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
398

on the Sněžka-M (Modernizovaný LOS-M pro
dělostřelce, 2014).
The LOS-M uses a telescopic arm to extend the
sensing head to a maximum height of 4,5 meters.
Sensoric head of the LOS-M contains these devices:
Merlin 2 daytime surveillance camera;
HK-170 CCD camera;
LIRC 640 thermal imaging camera;
Zeiss LDM 38 laser rangefinder;
Infrared pointer.
The LOS-M is equipped with the AN/PSN-13A
DAGR GPS receiver and the Talin 3000 inertial
navigation unit (Modernizovaný LOS-M pro
dělostřelce, 2014) to determine its own position and
direction of sensing heads. (Talin: Inertial Land
Navigator, 2014). As a backup target acquisition
system, LOS-M is equipped with Sterna V w/ Vector
21 Nite (section 3.5).
3.3 LOV-Pz
LOV-Pz is target acquisition vehicle based on Iveco
M65E 4x4 wheeled platform (vtusp.cz, 2018).
Target acquisition devices are fixed within the
LOV-Pz in a gun station located on the roof of the
vehicle. Weapon station contains these devices:
Puma FHD daytime surveillance camera;
Falcon 135 CCD camera;
Spirit 140 thermal imaging camera;
Zeiss LDM 38 laser rangefinder;
Infrared pointer.
To determine the position and direction of the
weapon station's observation, LOV-Pz is equipped
with the AN/PSN-13A DAGR GPS receiver and the
Talin 3000 inertial navigation unit (Talin: Inertial
Land Navigator, 2014). As a backup target
acquisition system, LOV-Pz is equipped with Sterna
V w/ Vector 21 Nite (section 3.5).
3.4 GonioLight V w/ Vector 21 Nite
Target acquisition set of the GonioLight V and laser
rangefinder Vector 21 Nite was delivered to the
Czech army as a backup target acquisition system
for first pieces of Sněžka-M and LOS-M vehicles
(Modernizovaný LOS-M pro dělostřelce, 2014). For
other manufactured pieces, this kit has already been
replaced by the Sterna V based set (section 3.5).
This target acquisition set is based on the
GonioLight digital magnetic compass (DMC)
complemented by the Vector 21 laser rangefinder
(LRF), AN/PSN-13A DAGR GPS receiver, data
terminal for processing and transferring of gained
data (GONIOLIGHT: Digital observation station,
2018). Vector 21 Nite is night vision capable so this
device gives target acquisition units night time
operations capability (VECTOR FAMILY:
Rangefinder Binoculars, 2017).
3.5 Sterna V w/ Vector 21 Nite
The Sterna V w / Vector 21 Nite is manufactured by
Safran Vectronix as well as the previous set
(STERNA: Gyroscope based target acquisition
system, 2018). Unlike the previous target acquisition
set, this type is based on the Sterna V gyroscopic
true north finder (TNF).
The only difference between the two kits is
different basic device used for the determination of
bearings. Difference between GonioLight V and
Sterna V is significant. GonioLight V is based on the
use of a digital magnetic compass (DMC), the
accuracy of which is strongly influenced by metallic
objects in its vicinity, making it impossible to use
near combat vehicles. On the other hand, the Sterna
V true north finder, uses a gyroscopic system that is
not affected by metallic objects. When functioning
in proximity of combat vehicles, use of electronic
devices can significantly affect measuring accuracy.
This affection is demonstrated on measurement by
DMC, with active cell phone in its vicinity (chapter
3.7).
Sterna V TNF uses gyroscopic system which is
not affected by these devices. Because of this,
delivery plan had been changed, because of this
aspect and it was decided not to buy more target
acquisition sets based on GonioLight V. Effects of
electronic devices on DMC measurement was
confirmed by experiment, whose resuls are stated in
section 3.7.
Like the previous target acquisition set, Sterna V
w/ Vector 21 Nite is complemented by AN/PSN-
13A DAGR and data terminal (STERNA-V:
Výnosná souprava dělostřeleckého pozorovatele,
2015).
3.6 Sterna V w/ JIM LR, TLS 40
Last evaluated target acquisition set used by the
Czech army is the Sterna V w/ JIM LR, TLS 40
(JIM LR: Long-range multifunction cooled infrared
binoculars, 2017). Just as the previous set is based
on the use of the true north finder Sterna V, but its
own observation device is different. In this case it is
a combination of multifunction long range cooled
Target Acquisition Systems - Suitability Assessment based on Joint Fires Observer Mission Criteria Determination
399
infrared binocular JIM LR and LRF Zeiss TLS 40
(TLS 40: Target Acquisition Binoculars, 2007).
This set is complemented by AN/PSN-13A
DAGR and data terminal.
3.7 Example of Direction Measuring
Affection of DMCs
Various metallic objects and electronic devices in
vicinity of magnetic device can affect magnetic
orientation. For these reasons, magnetic orientation
can be very inaccurate when basic principles are not
followed.
Magnetic orientation is used for aiming of target
acquisition systems. Different kind of orientation
should be prefered because of presence of areas with
magnetic anomalies, irregular course of magnetic
lines during the day and year, progresive increase of
infrastructure and time needed to use of magnetic
orientation.
Results of conducted experiment demonstrate the
influence of cell phones on magnetic orientation.
Purpose of the experiment was to determine the
influence of selected cell phones on local
deformation of magnetic line.
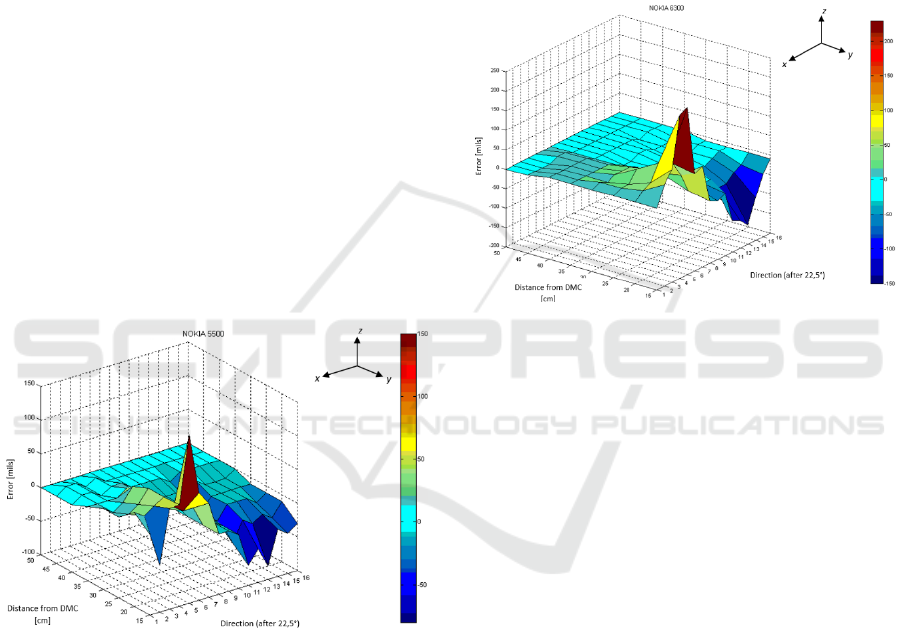
Figure 1: Errors of magnetic azimuths caused by NOKIA
5500.
Influence of two selected cell phones on
deformation of the local magnetic line during
direction measuring by DMC was measured on type
Leica Vector IV DMC/LRF. Measurement of
influence had been conducted in various directions
(22,5° jump) and distances (5 cm jump) from the
DMC. Affecting devices were cell phones NOKIA
5500 and NOKIA 6300. These two types were most
widely used at a time this experiment was done.
Cell phone was placed in the same height as the
DMC and was oriented in the same direction
(display pointing toward grid north). Results of
measurement are stated in figures 1 and 2. X-axis
represents each direction with interval of 22,5°
(determined to clearly show the course of errors).
Direction 1 represents the direction of magnetic
north. Distance of cell phone from center of DMC is
stated on Y-axis. Minimal distance of measurement
is 15 centimeters because due to the DMC
dimensions it was not possible to get it closer.
Calculated errors of magnetic azimuths on given
observed point are represented by the Z axis.
Figure 2: Errors of magnetic azimuths caused by NOKIA
6300.
Based on information stated in figures 1 and 2, it
is clear, that influence of cell phones on
measurement by DMC are widely different (even in
case of the same producer). Influence had been
manifested up to distance of 45 cm from DMC.
Within this distance, there is usually cell phone in
pocket of uniform, upper compartment of backpack
or during work in sitting position in pocket of pants.
Because the DMC functions in the same manner as
the compass needle, these results are to be
considered the same for these and similar devices.
According to results of the experiment, it is clear
that errors in measurement can be caused by
ignorance, inconsistency, or unruliness of the
operators. Accuracy of measurement is affected, not
only by cell phones, but also by power lines,
computers, GPS receivers, calculators, radios and all
objects containing metal components (combat
vehicles, helmets, pens, watches, knives, weapons
etc.) This equipment is necessary in combat
situations, and because of this, it is better to use
different kind of orientation (in case it is possible).
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
400

4 MULTI-CRITERIA
EVALUATION OF VARIANTS
The most appropriate and at the same time the most
accurate way of choosing the optimal variant is use
of the mathematical methods. The goal is to assess
the suitability of the use of individual TA systems
for JFO activity. Before this mathematical
evaluation, it is important to determine basic
elements of the assessment process. Goal of the
assessment is to select most suitable target
acquisition system for JFO needs. Assessment object
are target acquisition systems, with limiting
condition that as an object are considered only target
acquisition systems used by the Czech army.
Because overall assessment is conducted on its
basis, evaluation criteria are one of the most
importatnt elements. Evaluation criteria define basic
requirements on target acquisition systems according
to features needed for JFO work. Target acquisition
systems used by the Czech army represents
evaluated variants.
4.1 Determination of Evaluation
Criteria
When using multi-criteria decision-making methods,
we distinguish two types of criteria, both
quantitative and qualitative. The quantitative criteria
are expressed by a numerical value representing the
the exact amount of specific value. Qualitative
criteria are expressed verbally, because numerical
expression is complex or not possible at all.
Subsequent conversion of qualitative criteria to
numerical expression is not complicated, however,
there is a certain distortion. For the assessment of
the suitability of the individual types (variants) of
artillery TA systems, specific criteria were
established. The criteria were determined on the
basis of the practical experience and knowledge of
the authors of the joint fires in order to achieve a
reliable assessment. Authors of this article created
following criteria:
accuracy of own position grid determination;
orientation accuracy;
horizontal angles measurement accuracy;
distance measurement accuracy;
night obseravation capability;
low visibility observation capability;
speed of system preparation;
laser pointing capability.
Determining the location coordinates is an
indispensable element necessary for the operation of
target acquistion units. These coordinates are the
underlying information that determines other data,
especially the coordinates of the targets and other
observed objects. This criterion is labeled as C
1
and
it is quantitative, minimazing type of criterion.
The accuracy of device's orientation is an
important aspect for the precision of any data
collected by means of an artillery TA units. When
measuring directions, the error system is defined by
the deviation in the orientation of the device and the
deviation in the determination of the directions. The
sum of the two deviations is the resulting error in the
measurement of horizontal angles. The resulting
error then negatively affects the accuracy of the
observed points (targets) coordinates. This criterion
is labeled as C
2
and it is a quantitaive, minimizing
type of criterion.
Accuracy in horizontal angles measurement is a
key ability of target acquisition systems. Location of
targets or other points is determined on basis of
direction to these points (see criterion C
2
). This
criterion is labeled as C
3
and it is quantitative,
minimizing type of criterion
Accuracy of distance measurement is another key
capability of TA systems. Distance to observed target
(point) is another value used for target coordinates
determination. The deviation in the measured distan-
ces is then reflected in the accuracy of the calculated
point coordinates. This criterion is labelled as C
4
and
it is quantitative, minimizing type of criterion.
Night observation is an essential capability of
artillery TA systems for securing continuous ability
to request and guide joint fires. This criterion is
labeled as a C
5
and it is qualitative, maximizing type
of criterion.
Low visibility observation capability is another
important capability of each TA system for ensuring
of continuous operation of target acquisition units in
all weather and visibility conditions. This criterion is
labeled as a C
6
and it is qualitative, maximizing
criterion.
Speed of systems preparation for work is
important for effective support of maneuever units.
This criterion is labelled as a C
7
and it is
quantitative, minimizing type of criterion.
Marking of targets by laser is one of the basic
capabilities that greatly facilitates the designation of
targets for the purpose of aircraft guidance. This
criterion is labelled as a C
8
and it is qualitative,
maximizing type of criterion. Total inventory of
criteria used for target acquisition systems
evaluation is stated in table 1.
Target Acquisition Systems - Suitability Assessment based on Joint Fires Observer Mission Criteria Determination
401

Table 1: Evaluation criteria.
Criteria Form Type
C
1
: accuracy of own
position grid
determination
quantitative minimizing
C
2
: orientation accuracy quantitative minimizing
C
3
: horizontal angles
measurement accuracy
quantitative minimizing
C
4
: distance measurement
accuracy
quantitative minimizing
C
5
: night observation
capability
qualitative maximizing
C
6
: low visibility
observation capability
qualitative maximizing
C
7
: speed of systems
preparation for work
quantitative minimazing
C
8
: laser pointing
capability
qualitative maximizing
4.2 Criteria Weight Determination
First step in multi-criteria evaluation is
determination of criteria weight. Due to the nature of
the theme itself, criteria and variants, the authors
decided to use Saaty's method for weighting the
criteria. This method consists of assessing the
preferential relationship of criteria among
themselves, and the subsequent calculation of the
criteria weight. In table 2, individual values of
importance between each criterion are stated.
Table 2: Saaty´s comparison chart (Grasseová, Mašlej and
Brechta, 2010).
C 1 2 3 4 5 6 7 8
1
1 3 5 5 3 9 7 7
2
1/3 1 3 3 5 9 7 7
3
1/5 1/3 1 1 5 9 7 7
4
1/5 1/3 1
1 5 9 7 7
5
1/3 1/5 1/5 1/5 1 7 7 7
6
1/9 1/9 1/9 1/9 1/7 1 1/5 1/5
7
1/7 1/7 1/7 1/7 1/7 5 1 1/5
8
1/7 1/7 1/7 1/7 1/7 5 5 1
Depending on the nature of the desired result, the
arithmetic average equation was used to determine
the criteria weights.
´
=
×
×
…×
(1)
where:
´
is the criterion non-standardized weight;
is the criterion 1, 2, …, n;
is the number of criteria;
is the criterion value of importance.
After calculating the non-standardized weights,
the final step is to calculate the standard weights of
the criteria. This is done by use of following
equation.
=
´
∑
´
(2)
where:
is the criterion standardized weight;
´
is the criterion non-standardized weight;
is the number of criteria.
Table 3 lists the resulting calculations, non-
standardized and standardizedzed weights, and the
overall ranking of the criteria for the evaluation of
the individual TA systems.
Table 3: Resulting criteria weighs.
Criteria
Non-
standardized
weight
Standardized
weight
Orde
r
C
1
2,053 0,202 I.
C
2
1,733 0,171 III.
C
3
1,866 0,184 II.
C
4
1,866 0,184 II.
C
5
0,994 0,098 VI.
C
6
1,145 0,113 IV.
C
7
1,118 0,110 V.
C
8
0,665 0,065 VII.
4.3 Determination of Variants
Variants are a key component of evaluation process.
Variants mean specific things, activities, options or
other elements that we decide on. As an evaluated
variants, target acquisition systems used in the
Czech army were selected. These systems have been
described in chapter 3 of this article. Variants are as
folows:
V
1
: PPK Sněžka-M;
V
2
: PzS LOS-M;
V
3
: LOV-Pz;
V
4
: GonioLight V w/ Vector 21 Nite;
V
5
: Sterna V w/ Vector 21 Nite;
V
6
: Sterna V w/ JIM LR.
In addition to specifying the individual variants,
their partial evaluation must be performed in
accordance with the criteria set out in Chapter 4.1.
Within the individual criteria, their ratings will be as
follows:
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
402
C
1
: maximal deviation in position
determination in meters;
C
2
: maximal angular deviation in orientation
in mils;
C
3
: maximal angular deviation in horizontal
direction measurement in mils;
C
4
: maximal distance measurement deviation
in meters;
C
5
: this qualitative criterion will be rated "0" if
the device does not have the nigh vision capa-
bility and "1" if it possesses that capability.;
C
6
: this qualitative criterion will be rated "0" if
the system does not have the thermal imaging
capability and "1" if it possesses that
capability.;
C
7
: minimal time needed for target acquisition
system preparation in seconds;
C
8
: this qualitative criterion will be rated "0" if
the device does not have the laser pointing
capability and "1" if it possesses that
capability.;
4.4 Variants Evaluation
Variants evaluation is the last step in the process of
choosing the optimal variant. Within the evaluation
process, it is important to distinguish the
composition of criteria in terms of its type
(qualitative / quantitative). Since eight criteria, three
qualitative and five quantitative, have been
identified in this article, the selection of methods has
been considerably narrowed.
The most appropriate method for selecting a
suitable variant for mixed criteria is a method based
on direct expert assessment of partial
evaluations.This method multiplies the values of
each variant by the weight of given criteria.
Results of variants evaluation is stated in table 4.
From the table, it is possible to read individual par-
tial evaluation of variants within the given criteria.
The partial evaluation of the variants was
determined on the basis of the production
documentation supplied by the manufacturers of the
individual devices.
Table 4: Variants partial evaluation.
Variants/
Criteria
C
1
C
2
C
3
C
4
C
5
C
6
C
7
C
8
V
1
2,4 0,5 0,4 5 1 1 6 0
V
2
2,4 1 0,8 5 1 1 6 1
V
3
2,4 1 0,8 5 1 1 5 1
V
4
2,4 5 0,1 5 1 0 3 0
V
5
2,4 1,8 0,1 5 1 0 4 0
V
6
2,4 1,8 0,1 5 1 1 4 1
Due to the character of the evaluation of the
variants, the criteria were omitted for all variants of
the same values. These are the following criteria:
C
1
: accuracy of own position grid
determination;
C
4
: distance measurement accuracy;
C
5
: night observation capability.
Same values at criterion C
1
are caused by use of
GPS receiver AN/PSN-13A DAGR by all of
evaluated target acquisition systems
(rockwellcollins.com, 2018). Match within C
4
criteria was reached even though evaluated systems
use different types of laser rangefinders. All used
types of laser rangefinders has the same value of
maximal distance measurement deviation. Within C
5
criterion, all target acquisition systems are capable
of night observation.
Resulting variants evaluation are stated in table
5. Based on the multicriterial evaluation of the
variants, the most appropriate variant of the target
acquisition system for JFO activities is a set based
on Sterna V complemented by JIM LR and TLS 40.
5 CONCLUSION
Need for observer, who is able to request and control
strikes of artillery and air assets is based mainly on
practical experience of the Czech army as well as
other NATO partner countries. Given that the JFO
concept is a relatively new project under the Czech
army conditions and whose aspects are currently
being specified, it is necessary, besides training and
combat deployment, to specify the target acquisition
system whose capabilities most closely correspond
to the nature of JFO activity.
Since artillery units have recently been equipped
with new target acquisition systems, which are
characterized as one of the most advanced in the
current market for military sensors, it is
advantageous for the selection of system for the
work of JFO to be based on the experience of use of
these types. On the basis of multi-criterion
evaluation methods of the variants, the implemented
means were evaluated according to the needs of JFO
The result of the analysis is determination of optimal
variant of target acquisition system for JFO needs
which is the set of Sterna V w/ JIM LR and Zeiss
TLS 40.
Target Acquisition Systems - Suitability Assessment based on Joint Fires Observer Mission Criteria Determination
403

Table 5: Results of multi-criteria evaluation of target acquisition systems.
Variants/
Criteria
C
2
C
3
C
6
C
7
C
8
SUM Order
V
1
0,769 0,074 0,113 0 0 0,956 III.
V
2
0,684 0 0,113 0 0,065 0,862 V.
V
3
0,684 0 0,113 0,11 0,065 0,972 II.
V
4
0 0,129 0 0,33 0 0,459 VI.
V
5
0,547 0,129 0 0,22 0 0,896 IV.
V
6
0,547 0,129 0,113 0,22 0,065 1,074 I.
Form
quantitative quantitative qualitative quantitative qualitative
Type
max max max max max
Weight
0,171 0,184 0,113 0,110 0,065
REFERENCES
Blaha, M., Šilinger, K., 2018. Application support for
topographical-geodetic issues for tactical and technical
control of artillery fire. In International Journal of
Circuits, Systems and Signal Processing.
GONIOLIGHT: Digital observation station. (2017).
Heerbrugg: Safran Vectronix AG.
Grasseová, M., Mašlej, M. and Brechta, B. (2010).
Manažerské rozhodování. Brno: Univerzita obrany.
JIM LR: Long-range multifunction cooled infrared
binoculars. (2017). Boulogne-Billancourt Cedex:
Safran Electronics & Defense.
Modernizovaný LOS-M pro dělostřelce. (2014). ATM, (7),
pp.2-4.
Modernizovaná Sněžka-M předána AČR. (2015). A
Report, (11/2015), pp.32-33.
Pikner, I., Galatík, T., 2015. The Use of the Armed Forces
In The Postmodern Wars. In The 21th International
Scientific Conference Knowledge-Based Organization.
Pikner, I., Galatík, T., 2016. Lifelong military education in
the field of Military Art. In 2nd International
Conference on Lifelong Education and Leadership for
ALL (ICLEL).
Rockwellcollins.com. (2018). Defense Advanced GPS
Receiver. [online] Available at: https://www.rockwell
collins.com/Products_and_Services/Defense/Navigatio
n/Ground_Products/Defense_Advanced_GPS_Receive
r_-DAGR.aspx [Accessed 7 Jan. 2018].
STERNA: Gyroscope based target acquisition system.
(2017). Heerbrugg: Safran Vectronix AG.
STERNA-V: Výnosná souprava dělostřeleckého
pozorovatele. (2015). Slavičín: VTÚVM.
Stodola, P., Drozd, J., Křišťálová, D., Kozůbek, J., 2017.
Experiments with the UAS Reconnaissance Model in
the Real Environment. In Modelling and Simulation
for Autonomous Systems (MESAS).
Stodola, P., Mazal, J., 2015. Tactical and operational
software library. In Military Technologies (ICMT).
Šilinger, K., Blaha, M., 2017. Conversions of METB3
meteorological messages into the METEO11 format.
In Military Technologies (ICMT).
Šilinger, K., Blaha, M., 2017. The new automated fire
control system for artillery units based on
interoperability and standards. In Proceedings of the
14th International Conference on Informatics in
Control, Automation and Robotics (ICINCO).
Šilinger, K., Blaha, M., Potužák, L., Přikryl, B., 2016.
Perspective method for determination of fire for effect
in tactical and technical control of artillery units. In
Proceedings of the 13th International Conference on
Informatics in Control, Automation and Robotics
(ICINCO).
Šilinger, K., Blaha, M., Potužák, L., 2017. Data binding
issue in fire control application for technical control of
artillery fire. In 21st World Multi-Conference on
Systemics, Cybernetics and Informatics, Proceedings
(WMSCI).
Talin: Inertial Land Navigator. (2014). Sky Harbor Circle:
Honeywell International.
TLS 40: Target Acquisition Binoculars. (2007).
Oberkochen: Carl Zeiss Group.
VECTOR FAMILY: Rangefinder Binoculars. (2017).
Heerbrugg: Safran Vectronix AG.
VTUVM s.r.o. (2018). Lehké obrněné vozidlo průzkumné
LOV-Pz. [online] Available at: http://www.vtusp.cz/
a/vtuvm-lehke-obrnene-vozidlo-pruzkumne-lov-pz
[Accessed 11 Jan. 2018].
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
404
