
A Comparison of Techniques based on Image Classification and Object
Detection to Count Cars and Non-empty Stalls in Parking Spaces
D. Di Mauro
1
, A. Furnari
1
, G. Patan
`
e
2
, S. Battiato
1
and G. M. Farinella
1
1
Department of Mathematics and Computer Science, University of Catania, Catania, Italy
2
Park Smart s.r.l., Catania, Italy
Keywords:
Counting, Deep Learning, Classification, Object Detection, Smart Cities.
Abstract:
The world-wide growth of population in urban areas demands for the development of sustainable technologies
to manage city services, such as transportation, in an efficient way. Motivated by the cost-effectiveness of
image-based solutions, in this paper we investigate the exploitation of techniques based on image classification
and object detection to count cars and non-empty stalls in parking areas. The analysis is performed on a dataset
of images collected in a real parking area. Results show that techniques based on image classification are very
effective when parking stalls are delimited by marking lines and the geometry of the scene is known in advance.
1 INTRODUCTION AND
MOTIVATIONS
In 2007, as stated in (United Nations, 2008), due to an
unprecedented urban growth, the world’s population
was evenly split between urban and rural areas. As a
result, urban life problems such as air pollution, traf-
fic congestion, and lack of parking spaces, have wor-
sened sharply. Among other possible solutions, the
new concept of Smart Cities has been developed. This
concept proposes the application of recent technolo-
gical advancements in the areas of Internet of Things,
Computer Vision, Machine Learning, 4G Networks,
etc., to improve the liveability of cities. Among the
different applications concerning the concept of smart
cities e.g., traffic analysis (Raymond, 2001; Battiato
et al., 2018), vehicle tracking (Battiato et al., 2015),
etc. in this paper we focus on optimizing the use of
parking spaces in urban areas.
The use of private cars has massively increased
over the years, without a proportional expansion in
the number of parking spaces. Drivers waste a great
deal of time looking for a free parking space and fa-
vor the worsening of traffic and air pollution. Vari-
ous systems aimed at optimizing the use of parking
spaces require methods to count the number of vehi-
cles and free spaces in parking areas. There are three
major types of solutions in this field. Counter-based
technologies allow to detect whenever a car enters or
leaves in a closed parking area, equipped with a bar-
rier, in order to update the number of vehicles and the
available parking spaces. Sensor-based technologies
make use of sensors plunged into the asphalt to detect
the presence or absence of cars upon it. Image-based
technologies use cameras monitoring the parking area
and rely on Computer Vision to count vehicles.
Due to the Computer Vision and Machine Le-
arning advances in the last decade, we believe that
image-based solutions are economically advantage-
ous over other methods since they do not require spe-
cific sensors and can be easily implemented in the
context of free-access parking areas. Nevertheless,
such approaches have to face several variabilities de-
pending on the positioning of the cameras, the shape
of the parking spaces, different lighting conditions,
presence of shadows, occlusions, etc.
In this paper, we investigate the application of two
methods based on Image Classification and Object
Detection to tackle two different but related problems:
1) counting the number of empty and non-empty stalls
in a parking area, 2) counting how many cars are pre-
sent in a parking area. The first problem is common in
managed parking areas, where parking spots are deli-
mited by lines. The second one arises when there are
not lines delimiting the parking spots and hence the
configuration of the parking lot depends on how dri-
vers park. To perform the analysis, we collected and
labeled images of a parking area in a real scenario.
The rest of the paper is organized as follows.
Section 2 presents the related work. Section 3 ex-
plains the investigated methods. Section 4 introduces
328
Mauro, D., Furnari, A., Patanè, G., Battiato, S. and Farinella, G.
A Comparison of Techniques based on Image Classification and Object Detection to Count Cars and Non-empty Stalls in Parking Spaces.
DOI: 10.5220/0006851403280336
In Proceedings of the 15th International Joint Conference on e-Business and Telecommunications (ICETE 2018) - Volume 1: DCNET, ICE-B, OPTICS, SIGMAP and WINSYS, pages 328-336
ISBN: 978-989-758-319-3
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

the proposed dataset and the experimental settings.
Section 5 reports the results. Section 6 concludes the
paper.
2 RELATED WORKS
We use the verb “counting” to indicate three different
processes which we exploit depending on the num-
ber of instances we need to count (Davis and P
´
erusse,
1988):
Estimation: the process to approximate the correct
number of elements in a scene. We use this pro-
cess when the number of elements is too big to ex-
tensively count each object instance, e.g. the num-
ber of leaves in a tree;
Subitizing: the process employed when the number
of objects ranges between 1 and 4 instances. The
term has been proposed (Kaufman et al., 1949) to
denote the capability to determine the number of
objects instantly (i.e. at glance); When the number
of objects is higher than 4, the ability to count at
glance decreases in terms of accuracy and speed;
Counting: the process of finding the exact number of
elements given a finite set of objects of a specific
type.
Past neuroscience research has investigated the coun-
ting processes at neural level. Eiselt and Nieder (Ei-
selt and Nieder, 2013) discovered in the primate brain
the presence of rule-selective neurons specialized in
guiding decisions related to a specific magnitude type
only, as well as generalizing neurons that respond
abstractly to the concept of magnitude rules. These
specialized neurons “number neurons” (Nieder, 2016)
encode the number of elements in a set, as well the
numerosity or cardinality, from both spatial and tem-
poral presentation arrays.
For the Computer Vision community, Object
counting is still a challenging problem which needs a
fine-grained understanding of the scene. The task has
been typically studied considering specific contexts,
e.g., counting people in crowded scenes (Chan et al.,
2008; Chen et al., 2015; Li et al., 2008; Lempitsky
and Zisserman, 2010; Zhang et al., 2015), cells in
biological images (Lempitsky and Zisserman, 2010),
bacterial colonies (Ferrari et al., 2017), penguins (Ar-
teta et al., 2016), etc.
In particular, counting approaches can be divided
into three groups (Loy et al., 2013):
Counting by Detection: these methods use object
detection and count extensively (Chen et al.,
2015).
Counting by Clustering: these methods assume the
presence of individual entities presenting unique
yet coherent patterns which can be clustered to ap-
proximate the final number of instances (Rabaud
and Belongie, 2006).
Counting by Regression: these methods count enti-
ties by learning a direct mapping from low-level
imagery to numbers (Chan et al., 2008; Lempitsky
and Zisserman, 2010; Arteta et al., 2014; Fiaschi
et al., 2012).
The increasing use of surveillance systems is pus-
hing the use of image-based solutions to understand
the semantics of parking areas in order to infer the
presence of free spaces and to count cars. Some
efforts have been done to create datasets useful to
tackle this problem. De Almeida et al. (De Almeida
et al., 2015) built a dataset containing pictures acqui-
red in different climatic conditions (cloudy, sunny,
rainy) and considering three different parking areas.
They have benchmarked the problem of discrimina-
ting empty vs non-empty spaces comparing two diffe-
rent hand-crafted features: Local Binary Patterns and
Local Phase Quantization. The extracted features are
exploited with a SVM classifier.
An approach to analyze events and object trajec-
tories in order to discriminate empty stalls from non-
empty ones is proposed in (Ng and Chua, 2012). The
authors employed motion trajectories as features and
applied the adaptive Gaussian Mixture Model (GMM)
followed by connected component analysis for back-
ground modeling and objects tracking.
Wu et al. (Wu et al., 2007) described a pipeline
in which an image patch is sampled every three stalls
present in a frame. Hand-crafted features are hence
computed to infer the likelihood that a pixel belongs
to ground regions. The features extracted from the
patch representing the three contiguous parking spa-
ces are given to a eight-way Support Vector Machine
(SVM) to classify the 2
3
possible configurations of
free or occupied stalls in which the three spaces can
be. Conflicts between two neighboring patches are re-
fined by employing a Markov Random Field (MRF).
Deep learning techniques have been recently
adopted in this domain obtaining promising perfor-
mances. In (Amato et al., 2017), a new dataset
(CNRPark-EXT) to train deep learning based models
has been introduced. A modified AlexNet CNN is
employed to obtain a reduced-size model in order to
make inference possible in real-time on low-cost em-
bedded devices. Di Mauro et al. (Di Mauro et al.,
2016) proposed an evaluation of supervised and semi-
supervised approaches based on a Convolutional Neu-
ral Network (CNN) fine-tuned using respectively la-
beled and pseudo-labeled data. The main aim of the
A Comparison of Techniques based on Image Classification and Object Detection to Count Cars and Non-empty Stalls in Parking Spaces
329

Figure 1: An example image acquired in a real parking lot
using a fixed camera with parking stalls highlighted in green
(the image is best seen in digital format). To count non-
empty parking spaces, we assume that the positions of the
stalls are known in advance.
work was to assess which approach is the most con-
venient to balance labeling effort over classifications
performance.
3 METHODS
As mentioned before, we are interested in counting
the number of empty and non-empty stalls in a par-
king area, as well as in counting how many cars are
present. These two tasks are related but not identical.
The number of cars present in the parking area cannot
be directly inferred from the number of free parking
spaces and the total number of stalls. Indeed, some
vehicles may, for instance, be traversing the parking
spaces, while others might be parked outside the stalls
or they might occupy more than one stall. We assume
a single camera pointing to the parking area, which
acquires images similar to the one shown in Figure 1.
The involved setup is convenient because it reduces
the costs of deployment, trying to monitor all the par-
king lot with the minimum number of cameras.
3.1 Counting Non-empty Spaces
This task consists in counting the number of occu-
pied parking spaces in the monitored area. We assume
that the position of each stall is known in advance (Fi-
gure 1). It should be noted that, since the camera is
fixed, labeling the position of the stalls is part of a
calibration process which needs to be performed only
once (i.e., when the camera is installed). We consider
two approaches to count non-empty parking spaces:
an approach based on image classification, and an ap-
proach based on object detection.
Image Classification. The first approach considers
the problem as an image-based binary classification
task. For each stall, we first extract the smallest
square image patch containing it. Each image patch is
labeled as “empty” or “full” depending on the occu-
pancy status of the related stall. A classifier is hence
trained to discriminate between “empty” and “full”
stalls. At inference time, the trained classifier is used
to determine the status of each stall in order to obtain
the number of non-empty parking spaces.
Object Detection. The second approach employs
a car detector to localize all the cars present in the
image. All bounding boxes detected with a score lo-
wer than a given threshold d
1
are discarded. The In-
tersection Over Union (IoU) measure between each
stall and each retained bounding box is hence com-
puted. A stall is deemed to be occupied if the IoU
with at least one detected car is higher than a given
threshold d
2
. The method allows to count the num-
ber of non-empty parking spaces by determining the
status of each stall. This approach allows to obtain
also information about cars which are parked on non-
marked spaces. Such information can be useful to al-
low for better management of parking areas, e.g. de-
tecting misparked cars.
3.2 Counting Cars
The question we want to address is the following:
“How many cars are present in a given Region of Inte-
rest (RoI)?” This problem focuses on a more general
scenario which does not assume the geometry of the
scene to be known in advance or delimited parking
stalls to be present. Also in this case, we consider
two approaches, one based on image classification,
and the other one based on object detection.
Image Classification. The first approach uses the
output of the binary Image Classification described
in the previous section to approximate the number of
cars present in the scene as the number of occupied
stalls. It should be noted that this method requires the
geometry of the scene to be known. Moreover, this
approach cannot deal with cars which are not placed
in any of the marked stalls.
Object Detection. This method uses a vehicle de-
tector to find cars present in the scene. Bounding
boxes with detection score lower than the threshold
r
1
or with IoU score with respect to the given Region
of Interest lower than a threshold r
2
are discarded. We
obtain the total number of cars present in the RoI by
considering all retained bounding boxes.
SIGMAP 2018 - International Conference on Signal Processing and Multimedia Applications
330

Table 1: Videos contained in the dataset, along with the
corresponding number of labeled frames.
Camera Video Frame Number
Camera 1
Video 1.1 1,801
Video 1.2 1,801
Camera 2
Video 2.1 1,801
Video 2.2 2,241
Camera 3
Video 3.1 1,321
Video 3.2 2,101
Total 11,066
4 DATASET AND
EXPERIMENTAL SETTINGS
For the purpose of this study, we collected a dataset
comprising a total of 11, 066 images captured during
2 days in our living lab which is located at the campus
of the University of Catania (Figure 2). Each frame
has been labeled with annotations in the form of boun-
ding boxes and parking space configurations.
The dataset has been acquired using three Full-
HD cameras looking at different parking spaces. The
three cameras are referred to as “Camera 1”, “Ca-
mera 2” and “Camera 3”. “Camera 1” observes 12
parking spaces (Figure 3), “Camera 2” monitors 14
parking spaces (Figure 4), and “Camera 3” acquires
images of 12 parking spaces (Figure 5). Given the dif-
ferent viewpoints of the cameras, the acquired scenes
are characterized by different scene geometries. We
recorded two long videos per camera at 1 f ps. The
two videos have been acquired in different days and
care has been taken to make sure covering many as
possible configurations of the parking spaces, inclu-
ding the cases in which the parking area was empty
and fully occupied. Table 1 summarizes the videos
contained in the dataset and reports the number of fra-
mes of the considered videos.
For each image frame contained in the dataset, we
labeled a Region of Interest specifying the area within
which the parking spaces are comprised. Each image
has been manually labeled to report:
• the total number of cars present in the monitored
parking space;
• a bounding box around each car inside the moni-
tored parking space;
• a binary vector, each component of which repre-
sents the status of the i-th parking space as empty
(0) or non-empty (1);
• the coordinates of the four corners for each stall
present in the frame (see Figure 1).
We propose two different ways of splitting the
data into training and testing sets. The first split as-
sumes that training and testing data have been acqui-
red using a single camera. This gives rise to 6 dif-
ferent data subsets (one for each camera), where one
of the two videos is used for training, and the other
one is used for testing (subset “Nx” in Table 2). The
6 subsets are intended to assess the performance of
methods when exposed to data acquired from a single
camera. The second data split assumes that both trai-
ning and test data have been acquired using the three
cameras. In this case, we obtain two subsets (subset
“X” in Table 2) where data acquired using the three
cameras, but belonging to one of the two videos is
used for training, while the remaining is used for test.
These two subsets are intended to assess the ability of
methods to generalize to different scenes.
All experiments have been performed using the
Caffe library (Jia et al., 2014) on a machine equip-
ped with four NVIDIA GeForce TITAN X with 12Gb
of DDR5 RAM.
4.1 Evaluation Measures
To assess the discrepancy between predicted counts
and ground truth counts, we evaluate the investigated
approaches by computing the Absolute Errors (AE).
Given a test frame I
i
, the predicted count ˆy
i
, and the
ground truth count y
i
, we compute the absolute error
corresponding to I
i
as follows:
AE
i
= |y
i
− ˆy
i
| (1)
To evaluate the performance on a set of test frames
I = {I
i
}
N
i=1
, we also compute statistics of the AE va-
lues computed for each frame, including minimum,
maximum, median and mean. In particular, we consi-
der the standard Mean Absolute Error (MAE), which
is given by:
MAE(I ) =
1
N
N
∑
i
AE
i
=
1
N
N
∑
i
| ˆy
i
− y
i
| (2)
It should be noted that the absolute errors and the de-
rived statistics are easy to interpret, as they are ex-
pressed with the same unit measure of the original
data. E.g., a method reporting a MAE equal to 1 is, in
average, overestimating or underestimating the count
by 1 unit.
To evaluate the performance of the different com-
ponents employed in the investigated methods (i.e.,
image classification and object detection), we use the
most appropriate measures. Specifically, we evaluate
binary image classification using accuracy (fraction
of correctly classified images), whereas object de-
tection using mean Average Precision (mAP) as pro-
posed in (Everingham et al., 2010).
A Comparison of Techniques based on Image Classification and Object Detection to Count Cars and Non-empty Stalls in Parking Spaces
331
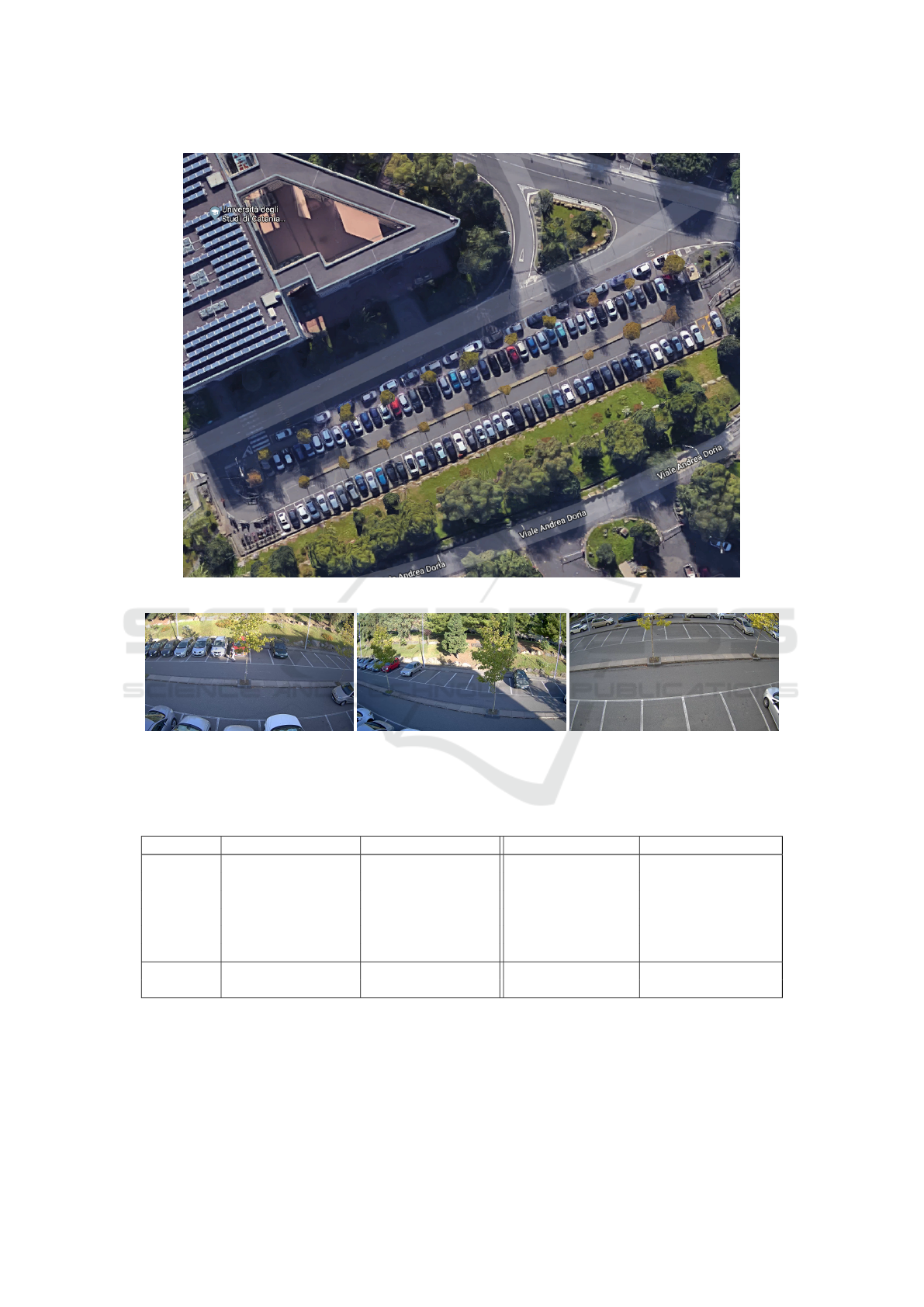
Figure 2: A satellite image (Google, 2018) of the monitored parking area located at the campus of the University of Catania.
Figure 3: Camera 1 observes 12 par-
king spaces.
Figure 4: Camera 2 observes 14 par-
king spaces.
Figure 5: Camera 3 observes 12 par-
king spaces.
Table 2: Data subsets arising from the two considered data splits and performance of the binary stall classifier, using accuracy
(fraction of correctly classified stalls); performance of the car detector is measured using standard mean Average Precision
(mAP).
Subset Training Data Testing Data VGG16 Accuracy FasterRCNN mAP
Subset 1a Video 1.1 Video 1.2 0.991 0.224
Subset 1b Video 1.2 Video 1.1 0.987 0.381
Subset 2a Video 2.1 Video 2.2 0.986 0.358
Subset 2b Video 2.2 Video 2.1 0.988 0.185
Subset 3a Video 3.1 Video 3.2 0.949 0.228
Subset 3b Video 3.2 Video 3.1 0.989 0.340
Subset A Videos 1.1, 2.1, 3.1 Videos 1.2, 2.2, 3.2 0.911 0.551
Subset B Videos 1.2, 2.2, 3.2 Videos 1.1, 2.1, 3.1 0.952 0.698
4.2 Image Classification
Training and testing data for the binary classification
component are obtained by extracting an image pa-
tch around each labeled stall. This is repeated for
each frame of the dataset. The extracted image pat-
ches are hence assigned a binary label depending on
the occupancy status of the stall: 0 for “empty” and
1 for “full”. Using this procedure, we obtain a to-
tal of 17, 688 samples for Video 1.1 (10325 occupied,
7363 empty), 17, 712 samples for Video 1.2 (8463
occupied, 9249 empty), 20, 636 samples for Video 2.1
SIGMAP 2018 - International Conference on Signal Processing and Multimedia Applications
332
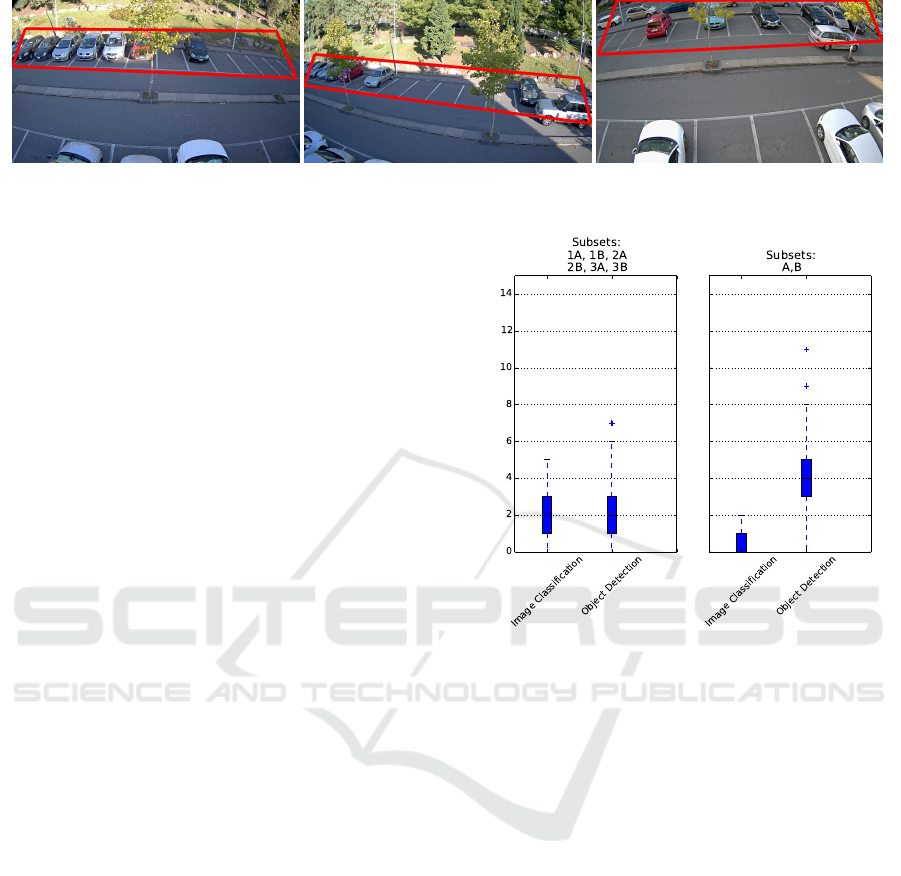
Figure 6: Region of Interest (RoI) for
Camera 1.
Figure 7: Region of Interest (RoI) for
Camera 2.
Figure 8: Region of Interest (RoI) for
Camera 3.
(10530 occupied, 10106 empty), 25, 676 samples for
Video 2.2 (12310 occupied, 13366 empty), 13, 032
samples for Video 3.1 (5911 occupied, 7121 empty),
20, 556 samples for Video 3.2 (11304 occupied, 9252
empty).
The binary image classification component to discri-
minate between “empty” and “full” stalls has been
implemented by fine-tuning a VGG16 Convolutional
Nerual Network (CNN) (Simonyan and Zisserman,
2014) pre-trained on ImageNet (Russakovsky et al.,
2015). The fine-tuning process is carried out for 10
epochs. A different model is trained on each data sub-
set. Table 2 reports accuracy values on the test sets for
each of the considered data subsets.
4.3 Object Detection
To implement a car detector, we fine-tuned the Fas-
terRCNN (Ren et al., 2015) object detector based on
VGG16 starting from weights pre-trained on Image-
Net. The training process is carried out for 70, 000
iterations using a batch size of 1. As for the detection,
we train a separate model for each data subset. Ta-
ble 2 reports mAP values on the test sets for each of
the considered data subsets.
Threshold Selection. Counting using Object Dete-
cion as discussed in Section 3 make use of two dif-
ferent thresholds to set parking stalls as “empty” or
“occupied” and to count cars. We set such thresholds
to the values which optimize the performance of the
considered method on a validation set which is for-
med randomly selecting 15% of the training samples.
The search for optimal values is performed indepen-
dently on each data subset.
When counting non-empty parking spaces we choose
the values of d
1
and d
2
which minimize the MAE on
the validation set. When counting cars we choose the
values of r
1
and r
2
which minimize the MAE on the
validation set.
Figure 9: Box plots for counting non-empty spaces. We
plot the mean absolute error for counting non-empty spaces
in the single camera experiment and in the multiple camera.
Higher is the worst.
4.4 RoI Selection
As stated in Section 3.2, we are interested in coun-
ting the number of cars present in a Region of Interest
(RoI) of the frame. For each camera, we annotated a
RoI corresponding with the area including the stalls.
All methods have been tested considering only the se-
lected RoI, hence discarding any detection result not
included in the RoI. Figures 6, 7 and 8 show the RoIs
considered in our experiments.
5 RESULTS
Counting Parking Spaces Results. Table 3 reports
some statistics of the AE values computed for the dif-
ferent experiments performed on the considered data
subsets. Specifically, the table reports the minimum,
maximum, mean and median Absolute Error over the
considered subset. We also report results for the ag-
gregation of different data subsets. In particular, we
A Comparison of Techniques based on Image Classification and Object Detection to Count Cars and Non-empty Stalls in Parking Spaces
333

Figure 11: An example of discriminating empty and non-empty stalls with considered methods.
consider the aggregation of subsets 1a to 3b, each of
which contains images acquired by a single camera,
as well as the aggregation of Subsets A and B, which
contain images acquired by different cameras. Fi-
gure 9 also reports box plots for the AE values con-
tained in the two aggregated sets discussed above.
The best performance is achieved by the method
based on Image Classification. This method always
obtains a minimum AE equal to 0 and maximum AE
values not exceeding 5 units. Median errors are often
close to zero. The Mean Absolute Errors of Image
Classification methods are overall significantly lower
than methods based on Object Detection both in the
case of single camera tests (Subsets 1a to 3b) and
multiple camera tests (Subsets A and B). This obser-
vation is made particularly clear by Figure 9, in which
the box plots related to the Image Classification met-
hod exhibit median values and quartile positions lo-
wer than Object Detection. Interestingly, the method
based on Image Classification benefits from the pre-
sence of different geometries in the training set, allo-
wing to further lower the MAE of 1.63 to 0.68 (com-
pare “Subsets: 1a, 1b, 2a, 2b, 3a, 3b” to “Subsets: A,
B” in Table 3 and compare left and right plots in Fi-
gure 9). On the contrary, the method based on Object
Detection achieve much worse results. This observa-
tion suggests that the method based on Image Classi-
fication is more capable to generalize despite can be
used only when stalls are marked. Figure 11 shows a
visual example of the counting stalls results.
Counting Cars Results. Table 4 and Figure 10 re-
port the statistics of AE values and box plots related
to experiments on counting cars. It should be noted
that, in this case, the method based on Image Classi-
fication should be considered as a baseline, since it is
affected by a systematic error due to the fact that the
number of non-empty spaces is not always equal to
the number of cars (i.e., the method cannot count cars
parked outside the stalls). Nevertheless, similarly to
the previous experiment, the method based on Image
Classification achieves the best results (MAE equal to
1.57 in the case of a single camera geometry and 1.16
for multiple camera geometries). This suggest that,
Figure 10: Box plots for counting cars. We plot the mean
absolute error for counting cars in the single camera expe-
riment and in the multiple camera. Higher is the worst
when stalls are present and their location is known,
this information can be exploited to count cars. Inte-
restingly, all the methods benefit from the presence of
different camera geometries in this experiment (com-
pare the two plots in Figure 10).
6 CONCLUSIONS
This paper investigated and compared two different
approaches to count non-empty spaces and cars in
parking areas. To perform the analysis, a dataset
of videos has been collected in a real scenario and
each frame has been labeled according to the position
of parking stalls, the number of occupied stalls, and
the number of cars in the frame. Results show that,
when the geometry of the scene is known (i.e., stalls
are marked), the system can take advantage of binary
classification methods to obtain competitive results.
SIGMAP 2018 - International Conference on Signal Processing and Multimedia Applications
334

Table 3: Absolute Errors for the task of counting non-empty stalls. Best results for each data subset are reported in bold
numbers.
Absolute Errors
Subset Method Min Max Mean (MAE) Median
Subsets: 1a, 1b, 2a
2b, 3a, 3b
Image Classification 0.00 5.00 1.63 1.00
Object Detection 0.00 7.00 2.15 2.00
Subset 1a
Image Classification 0.00 3.00 1.48 1.00
Object Detection 0.00 7.00 4.20 4.00
Subset 1b
Image Classification 0.00 2.00 0.54 0.00
Object Detection 0.00 5.00 2.26 3.00
Subset 2a
Image Classification 0.00 3.00 2.49 3.00
Object Detection 0.00 5.00 1.54 1.00
Subset 2b
Image Classification 0.00 5.00 3.22 4.00
Object Detection 0.00 4.00 2.04 2.00
Subset 3a
Image Classification 0.00 2.00 0.88 1.00
Object Detection 0.00 4.00 1.28 1.00
Subset 3b
Image Classification 0.00 3.00 0.86 1.00
Object Detection 0.00 3.00 1.82 2.00
Subsets: A, B
Image Classification 0.00 2.00 0.56 0.00
Object Detection 0.00 11.00 4.23 4.00
Subset A
Image Classification 0.00 1.00 0.40 0.00
Object Detection 0.00 8.00 4.09 4.00
Subset B
Image Classification 0.00 2.00 0.68 0.00
Object Detection 0.00 11.00 4.34 4.00
Table 4: Absolute Errors for the task of counting cars. Best results for each data subset are reported in bold numbers.
Absolute Errors
Subset Method Min Max Mean (MAE) Median
Subsets: 1a, 1b, 2a
2b, 3a, 3b
Image Classification 0.00 6.00 1.57 1.00
Object Detection 0.00 14.00 2.83 2.00
Subset 1a
Image Classification 0.00 6.00 1.44 1.00
Object Detection 0.00 11.00 2.38 2.00
Subset 1b
Image Classification 0.00 4.00 0.56 0.00
Object Detection 0.00 11.00 3.43 3.00
Subset 2a
Image Classification 0.00 6.00 2.37 2.00
Object Detection 0.00 10.00 2.30 2.00
Subset 2b
Image Classification 0.00 6.00 3.15 4.00
Object Detection 0.00 14.00 5.03 5.00
Subset 3a
Image Classification 0.00 5.00 0.85 1.00
Object Detection 0.00 7.00 1.92 2.00
Subset 3b
Image Classification 0.00 2.00 0.74 1.00
Object Detection 0.00 9.00 1.98 1.00
Subsets: A, B
Image Classification 0.00 7.00 1.16 1.00
Object Detection 0.00 11.00 1.95 2.00
Subset A
Image Classification 0.00 5.00 0.87 1.00
Object Detection 0.00 9.00 1.77 1.00
Subset B
Image Classification 0.00 7.00 1.39 1.00
Object Detection 0.00 11.00 2.10 2.00
A Comparison of Techniques based on Image Classification and Object Detection to Count Cars and Non-empty Stalls in Parking Spaces
335

REFERENCES
Amato, G., Carrara, F., Falchi, F., Gennaro, C., Meghini, C.,
and Vairo, C. (2017). Deep learning for decentralized
parking lot occupancy detection. Expert Systems with
Applications, 72(15):327–334.
Arteta, C., Lempitsky, V., Noble, J. A., and Zisserman, A.
(2014). Interactive Object Counting. In European
Conference on Computer Vision, pages 1–15.
Arteta, C., Lempitsky, V., and Zisserman, A. (2016). Coun-
ting in the wild. In European Conference on Computer
Vision, pages 483–498.
Battiato, S., Farinella, G. M., Furnari, A., Puglisi, G., Sni-
jders, A., and Spiekstra, J. (2015). An integrated sy-
stem for vehicle tracking and classification. Expert
Systems with Applications, 42(21):7263–7275.
Battiato, S., Farinella, G. M., Gallo, G., and Giudice, O.
(2018). On-board monitoring system for road traffic
safety analysis. Computers in Industry, 98:208 – 217.
Chan, A. B., Liang, Z. S.-J., and Vasconcelos, N. (2008).
Privacy preserving crowd monitoring: Counting pe-
ople without people models or tracking. In Confe-
rence on Computer Vision and Pattern Recognition,
pages 1–7. IEEE.
Chen, S., Fern, A., and Todorovic, S. (2015). Person count
localization in videos from noisy foreground and de-
tections. In Conference on Computer Vision and Pat-
tern Recognition, pages 1364–1372. IEEE.
Davis, H. and P
´
erusse, R. (1988). Numerical competence in
animals: Definitional issues, current evidence, and a
new research agenda. Behavioral and Brain Sciences,
11(4):561–579.
De Almeida, P. R., Oliveira, L. S., Britto, A. S., Silva, E. J.,
and Koerich, A. L. (2015). PKLot-A robust dataset
for parking lot classification. Expert Systems with Ap-
plications, 42(11):4937–4949.
Di Mauro, D., Battiato, S., Patan
`
e, G., Leotta, M., Maio,
D., and Farinella, G. M. (2016). Learning approaches
for parking lots classification. In International Con-
ference on Advanced Concepts for Intelligent Vision
Systems, pages 410–418. Springer.
Eiselt, A.-K. and Nieder, A. (2013). Representation of ab-
stract quantitative rules applied to spatial and numeri-
cal magnitudes in primate prefrontal cortex. The Jour-
nal of neuroscience: the official journal of the Society
for Neuroscience, 33(17):7526–34.
Everingham, M., Van Gool, L., Williams, C. K., Winn, J.,
and Zisserman, A. (2010). The pascal visual object
classes (voc) challenge. International journal of com-
puter vision, 88(2):303–338.
Ferrari, A., Lombardi, S., and Signoroni, A. (2017). Bacte-
rial colony counting with convolutional neural net-
works in digital microbiology imaging. Pattern Re-
cognition, 61:629–640.
Fiaschi, L., Koethe, U., Nair, R., and Hamprecht, F. A.
(2012). Learning to count with regression forest and
structured labels. In International Conference on Pat-
tern Recognition, pages 2685–2688.
Google (2018). Google Maps. https://www.google.it/maps/
@37.5264537,15.0741852,230m/data=!3m1!1e3?hl=en.
[Online; accessed 12-March-2017].
Jia, Y., Shelhamer, E., Donahue, J., Karayev, S., Long, J.,
Girshick, R., Guadarrama, S., and Darrell, T. (2014).
Caffe: Convolutional architecture for fast feature em-
bedding. arXiv preprint arXiv:1408.5093.
Kaufman, E. L., Lord, M. W., Reese, T. W., and Volkmann,
J. (1949). The discrimination of visual number. The
American journal of psychology, 62(4):498–525.
Lempitsky, V. and Zisserman, A. (2010). Learning to Count
Objects in Images. In Advances in Neural Information
Processing Systems, pages 1324–1332.
Li, M., Zhang, Z., Huang, K., and Tan, T. (2008). Estima-
ting the number of people in crowded scenes by MID
based foreground segmentation and head-shoulder de-
tection. In International Conference on Pattern Re-
cognition, pages 1–4.
Loy, C. C., Chen, K., Gong, S., and Xiang, T. (2013).
Crowd Counting and Profiling: Methodology and
Evaluation, pages 347–382. Springer, New York, NY.
Ng, L. L. and Chua, H. S. (2012). Vision-based activities
recognition by trajectory analysis for parking lot sur-
veillance. In International Conference on Circuits and
Systems, pages 137–142.
Nieder, A. (2016). The neuronal code for number. Nature
Reviews Neuroscience, 17(6):366–382.
Rabaud, V. and Belongie, S. (2006). Counting Crowded
Moving Objects. In Conference on Computer Vision
and Pattern Recognition, pages 705–711. IEEE.
Raymond, J.-F. (2001). Traffic analysis: Protocols, attacks,
design issues, and open problems. In Designing Pri-
vacy Enhancing Technologies, pages 10–29.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster R-
CNN: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, pages 91–99.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh,
S., Ma, S., Huang, Z., Karpathy, A., Khosla, A.,
Bernstein, M., Berg, A. C., and Fei-Fei, L. (2015).
ImageNet Large Scale Visual Recognition Challenge.
International Journal of Computer Vision (IJCV),
115(3):211–252.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
United Nations (2008). World urbanization prospects: The
2007 revision. United Nations Publications.
Wu, Q., Huang, C., Wang, S.-y., Chiu, W.-c., and Chen, T.
(2007). Robust parking space detection considering
inter-space correlation. In International Conference
on Multimedia and Expo, pages 659–662. IEEE.
Zhang, C., Li, H., Wang, X., and Yang, X. (2015). Cross-
scene crowd counting via deep convolutional neural
networks. In Conference on Computer Vision and Pat-
tern Recognition, pages 833–841. IEEE.
SIGMAP 2018 - International Conference on Signal Processing and Multimedia Applications
336
