
Feedback Linearization of Multilinear Time-invariant Systems
using Tensor Decomposition Methods
Kai Kruppa and Gerwald Lichtenberg
Faculty of Life Sciences, Hamburg University of Applied Sciences, 21033 Hamburg, Germany
Keywords:
Feedback Linearization, MTI Systems, Tensors, Decomposition Methods, Polynomial Methods.
Abstract:
Multilinear Time-Invariant (MTI) Systems can represent or approximate nonlinear systems behaviour in a
tensor framework. The paper derives efficient algorithms for feedback linearization of MTI systems. Basic
operations like products and partial derivatives of multilinear or higher order polynomials and Lie derivatives
can be defined in terms of Canonical Polyadic (CP) tensors, as well as the parameters of MTI systems.
The feedback linearizing controller design algorithm given in the paper results in a controller of a known
fixed structure with predictable memory demand, which is a great advantage in case of implementation. The
structure does not depend on the MTI plant and has to be adjusted to the application by setting its parameters
only. Moreover, the MTI algorithm only involves numerical and no symbolic computations. This is relevant
for large scale applications like heterogeneous networks e.g. for heat and power distribution, since the model
can be represented by decomposed tensors to reduce the storage demand.
1 INTRODUCTION
Controlling nonlinear systems by either linear or
nonlinear controllers are challenges of today’s ap-
plications. Nonlinear control problems result in
complex controllers or design procedures in many
cases, (Khalil, 1996). Some of them focus on special
classes of systems, like bilinear, (Ekman, 2005). Usu-
ally specialization on specific classes of systems low-
ers complexity and improves robustness of the design
procedures. For some applications, smaller model
classes are too restrictive, e.g. bilinear for heating sys-
tems, (Pangalos et al., 2015).
The class of multilinear time-invariant (MTI) systems
extend the linear systems by allowing all polynomial
terms which ensure the system is linear if all but one
variable is held constant, (Pangalos et al., 2015). It
also extends the class of bilinear systems. MTI sys-
tems are suitable, e.g. for heating systems or chem-
ical systems that are modeled by mass or power bal-
ances. Even though the latter systems have no inher-
ent multilinear structure, it was shown that the system
behavior can be approximated adequately by an MTI
model, (Kruppa et al., 2014).
Feedback linearization is a controller design method
for nonlinear systems, where a linear closed loop be-
havior to the reference input is achieved by nonlin-
ear state feedback, (Isidori, 1995). Computation of
the feedback control law can either be done sym-
bolically. There are different approaches that try
to compute the controller numerically by automatic
differentiation, (R
¨
obenack, 2005) or by using mul-
tivariable Legendre polynomials, (Deutscher, 2005).
Feedback linearization design techniques were inves-
tigated for special system classes like systems that can
be approximated well by bilinear models, (M
¨
uller and
Deutscher, 2005). The methods for general nonlin-
ear systems have in common, that the structure of the
controller law concerning the necessary mathemati-
cal operations is arbitrary and depends on the plant
model.
In this paper a feedback linearization method for MTI
systems without symbolic computations is introduced
resulting in a controller of fixed structure, where only
parameters have to be adjusted for application to a
specific plant. The computation is based on tensor
algebra since MTI system can be described and sim-
ulated very efficiently by canonical polyadic (CP) de-
composed tensors, (Pangalos et al., 2015). All system
parameters are stored in CP tensors. The applicabil-
ity of CP tensors in the fields of controller design and
diagnosis was shown in (Pangalos, 2016) or (M
¨
uller
et al., 2015). Therefore, the essential arithmetic oper-
ations: multiplication, differentiation and Lie deriva-
tives are derived here based on operational tensors,
i.e. the parameter tensors of the result of these oper-
232
Kruppa, K. and Lichtenberg, G.
Feedback Linearization of Multilinear Time-invariant Systems using Tensor Decomposition Methods.
DOI: 10.5220/0006852802320243
In Proceedings of 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2018), pages 232-243
ISBN: 978-989-758-323-0
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ations are computed by the parameter tensors of the
operands. The controller law can be computed nu-
merically by standard tensor techniques, e.g. given
in (Cichocki et al., 2009) or (Kolda and Bader, 2009).
This opens a wider application domain for compara-
ble simple modern controller design techniques. The
storage effort for the controller parameter set is pre-
dictable and can be described in a decomposed way,
which allows a design for large scale systems of mul-
tilinear structure.
The paper is organized as follows. Sections 2, 3 and 4
give an introduction to tensor algebra, MTI systems
and feedback linearization respectively. Section 5 de-
rives the computation of multiplication, differentia-
tion and Lie derivatives of polynomials based on oper-
ational tensors. These methods are used in Section 6
to compute a feedback linearizing control law for MTI
systems that are CP decomposed. A complexity anal-
ysis is provided in Section 7. An example shows the
validity of the approach in Section 8. In Section 9
conclusions are drawn.
2 TENSOR ALGEBRA
This paper focusses on a subclass of polynomial sys-
tems. State space models of MTI systems can be rep-
resented in a tensor framework. The following def-
initions for tensors can be found in (Cichocki et al.,
2009) or (Kolda and Bader, 2009).
Definition 1 (Tensor). A tensor of order n
X ∈ R
I
1
×I
2
×···×I
n
is an n-way array. Elements x(i
1
, i
2
, .. . , i
n
)
are indexed by i
j
∈ {1, 2, . . . , I
j
} in each dimen-
sion j = 1, . . . , n.
Although this framework has been developed for
complex domain C, here only real domains R are as-
sumed because the numbers result from real physi-
cal parameters. Here a Matlab-like tensor notation is
used. There are several arithmetic operations avail-
able for tensor computations, some are given here.
Definition 2 (Outer Product). The outer product
Z = X ◦ Y ∈ R
I
1
×I
2
×···×I
n
×J
1
×J
2
×···×J
m
, (1)
of two tensors X ∈ R
I
1
×I
2
×···×I
n
and Y ∈ R
J
1
×J
2
×···×J
m
is a tensor of order n + m with elements
z(i
1
, . . . , i
n
, j
1
, . . . , j
m
)= x(i
1
, . . . , i
n
)y( j
1
, . . . , j
m
). (2)
As the outer product is associative, it can be ap-
plied in sequence denoted by
N
i=1
X
i
= X
1
◦ X
2
◦ ··· ◦ X
N
.
Proposition 1 (Product Rule of Differentiation). The
partial derivative with respect to one variable x
j
,
with j = 1, . . . , k of an outer product of two ten-
sors A(x) ∈ R
I
1
×···×I
n
and B(x) ∈ R
J
1
×···×J
m
depend-
ing on k variables x =
x
1
·· · x
k
T
is given by
∂
∂x
j
(A(x)◦B(x)) =
∂
∂x
j
(A(x))◦B(x)+A(x)◦
∂
∂x
j
(B(x)). (3)
The proposition is proven by applying the stan-
dard product rule to the elementwise description of
the outer product (2) and rearranging as tensors,
which leads to (3).
Definition 3 (Contracted Product). The contrac-
ted product of two tensors X ∈R
I
1
×···×I
n
×I
n+1
×···×I
n+m
and Y ∈R
I
1
×···×I
n
h
X
|
Y
i
(k
1
, . . . , k
m
)=
I
1
∑
i
1
=1
·· ·
I
n
∑
i
n
=1
x(i
1
, . . . , i
n
, k
1
, . . . , k
m
)y(i
1
. . . i
n
), (4)
with k
i
∈
{
1, 2, . . . , I
n+i
}
, i = 1, . . . , m, is a tensor of
dimension I
n+1
× ··· × I
n+m
.
Definition 4 (k-mode Product). The k-mode product
of a tensor X ∈ R
I
1
×···×I
N
and a matrix W ∈ R
J×I
k
is
a tensor
Y = X ×
k
W ∈ R
I
1
×···×I
k−1
×J×I
k+1
×I
N
. (5)
The resulting tensor is given elementwise by
y(i
1
, . . . , i
k−1
, j, i
k+1
, . . . , i
N
)=
I
k
∑
i
k
=1
x(i
1
, . . . , i
N
)w( j, i
k
).
For tensors, the number of elements increases ex-
ponentially with the order, such that they have a very
high memory demand. Decomposition techniques
can significantly reduce complexity. Many tensor de-
composition techniques have been developed during
the last decades, (Grasedyk et al., 2013). In this paper
the canonical polyadic (CP) decomposition is used
because it is suitable for representation of MTI sys-
tems. In CP decomposition a tensor is factorized to a
sum of rank 1 elements.
Definition 5 (Rank 1 Tensor). A n
th
order ten-
sor X ∈ R
I
1
×···×I
n
is a rank 1 tensor if it can be com-
puted by the outer product of n vectors x
i
∈ R
I
i
X =
n
i=1
x
i
. (6)
Definition 6 (CP Tensor). A canonical polyadic (CP)
tensor of dimension I
1
× ··· × I
n
reads
K = [X
1
, X
2
, . . . , X
n
] · λ=
r
∑
k=1
λ(k)X
1
(:, k)◦·· ·◦X
n
(:, k)
=
r
∑
k=1
λ(k)
n
i=1
X
i
(:, k) , (7)
Feedback Linearization of Multilinear Time-invariant Systems using Tensor Decomposition Methods
233

where elements are computed by the sums of the outer
products of the column vectors of so-called factor ma-
trices X
i
∈ R
I
i
×r
, weighted by the elements of the so-
called weighting or parameter vector λ. An element
of the tensor K is given by
k(i
1
, . . .,i
n
)=
r
∑
k=1
λ(k)x
1
(i
1
, k)···x
n
(i
n
, k). (8)
The minimal number of rank 1 tensors that are
summed up in (7) to get K is defined as rank of the
CP tensor, (Cichocki et al., 2014).
Example 1. A 3
rd
order CP tensor is given by
K = [X
1
, X
2
, X
3
] · λ
=
r
∑
k=1
λ(k)X
1
(:, k)◦X
2
(:, k)◦X
3
(:, k).
Figure 1 shows the tensor as the sum of outer products
of the column vectors X
i
(:, k) of the factor matrices.
=
λ(1)
+· ·· +
λ(r)
K
X
1
(:, 1)
X
2
(:, 1)
X
3
(:, 1)
X
1
(:, r)
X
2
(:, r)
X
3
(:, r)
Figure 1: Third order CP tensor.
Standard tensor products like (2) or (4) can be
computed very efficiently by simple matrix opera-
tions when tensors are represented in a CP format, as
e.g. implemented in the Tensor Toolbox, (Bader et al.,
2015) or Tensorlab, (Vervliet et al., 2016).
Proposition 2 (Outer Product in CP Form). The outer
product Z = X ◦ Y of two CP tensors
X = [U
1
, . . . , U
n
] · λ
X
∈ R
I
1
×···×I
n
, (9)
Y = [V
1
, . . . , V
m
] · λ
Y
∈ R
J
1
×···×J
m
, (10)
with r
X
and r
Y
rank 1 components respectively gives
Z = [W
1
, . . . , W
n+m
] · λ
Z
∈R
I
1
×···×I
n
×J
1
×···×J
m
, (11)
that can be represented in a CP format. The factor
matrices and weighting vector are given by
W
i
= U
i
⊗ 1
T
r
Y
, ∀ i = 1, . . . , n, (12)
W
n+i
= 1
T
r
X
⊗ V
i
, ∀ i = 1, . . . , m, (13)
λ
Z
= λ
X
⊗ λ
Y
, (14)
with 1
k
denoting a column vector full of ones of
length k. Thus, the CP format of Z follows directly
from the factors of X and Y. The number of rank 1
components of the resulting tensor Z is r
Z
= r
X
r
Y
.
The proof 1 of the proposition is given in the Ap-
pendix. Although the CP decomposition (11) is the
exact outer product of (9) and (10), it could be that a
decomposition with a lower number r
Z
< r
X
r
Y
of ele-
ments exist. Finding this memory saving representa-
tion is an NP-hard problem, (Kolda and Bader, 2009).
Proposition 3 (Contracted Product in CP Form). The
contracted product
z =
h
X
|
Y
i
∈ R
I
n+1
of a tensor of order n + 1
X = [U
1
, . . . , U
n+1
] · λ
X
∈ R
I
1
×···×I
n+1
,
with arbitrary rank and a n
th
order rank 1 tensor with
the same sizes of the dimensions in the first n modes
Y = [v
1
, . . . , v
n
] ∈ R
I
1
×···×I
n
,
can be computed based on factor matrices by
z = U
n+1
λ
X
~
U
T
1
v
1
~ ··· ~
U
T
n
v
n
, (15)
where ~ denotes the Hadamard (elementwise) prod-
uct, (Pangalos et al., 2015).
Proposition 4 (k-mode Product in CP Form). The k-
mode product, (Bader et al., 2015)
Y = X ×
k
W (16)
of a n
th
order tensor
X = [U
1
, . . . , U
n
] · λ
X
∈ R
I
1
×···×I
n
(17)
and a matrix W ∈ R
J×I
k
is a CP tensor
Y = [V
1
, . . . , V
n
] · λ
Y
(18)
with weighting vector and factor matrices
λ
Y
= λ
X
, (19)
V
i
=
(
WU
i
, for i = k,
U
i
, else.
(20)
3 MTI SYSTEMS
Multilinear time-invariant systems have been intro-
duced in (Lichtenberg, 2010) or (Pangalos et al.,
2015). MTI systems can be realized by state space
models with multilinear functions as right hand sides.
With vector spaces X
i
, i = 1, . . . , n of each variable,
the overall vector space of the variables is given by
X = X
1
× ··· × X
n
.
A multilinear mapping h : X → H with vector
space H is linear in each argument, i.e. it fulfills the
condition
h(x
1
, . . . , a· ˜x
j
+ b· ˆx
j
, . . . , x
n
) =
a·h(x
1
, . . . , ˜x
j
, . . . , x
n
) + b·h(x
1
, . . . , ˆx
j
, . . . , x
n
), (21)
for all x
i
∈ X
i
, ˜x
j
, ˆx
j
∈ X
j
, 1 ≤ j ≤ n, a, b ∈ R, (Hack-
busch, 2012). Using multilinear functions as right
hand side functions of nonlinear state space models,
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
234

results in the coordinate-free representation of an MTI
system. The multilinear mappings are given by
f : X × U → X ,
g : X × U → Y ,
with state X , input U and output Y space. Both map-
pings fulfill the multilinearity condition (21). Next,
coordinates x ∈ X , u ∈ U and y ∈ Y are defined to
describe multilinear functions.
Definition 7 (Multilinear Function). A multilinear
function h : R
n
→ R
h(x) = α
T
m(x) (22)
with coefficient vector α=
α
1
·· · α
2
n
T
∈R
2
n
and
monomial vector m(x) =
1
x
n
⊗ ··· ⊗
1
x
1
∈ R
2
n
is a polynomial in n variables, which is linear, when
all but one variable are held constant.
Example 2. A multilinear function with 2 variables
x
1
and x
2
is given by
h(x
1
, x
2
)= α
T
m(x
1
, x
2
)=
α
1
α
2
α
3
α
4
1
x
1
x
2
x
1
x
2
= α
1
· 1 + α
2
· x
1
+ α
3
· x
2
+ α
4
· x
1
x
2
.
Introduction of coordinates leads to the state space
representation of MTI systems that can be written in
a tensor structure. The multilinear monomials can be
rearranged in a tensor framework. The monomial ten-
sor
M (x, u)=
1
u
m
, . . . ,
1
u
1
,
1
x
n
, . . . ,
1
x
1
, (23)
of dimension R
×
(n+m)
2
is rank one.
1
By rearranging
the parameters of the MTI system in the same way
than the monomial tensor, one gets its tensor repre-
sentation.
Definition 8 (MTI System in Tensor Form). Using
the monomial tensor (23), the tensor representation of
an MTI system with n states, m inputs and p outputs
reads
˙
x =
h
F
|
M (x, u)
i
, (24)
y =
h
G
|
M (x, u)
i
, (25)
with the transition tensor F ∈ R
×
(n+m)
2×n
and the out-
put tensor G ∈ R
×
(n+m)
2×p
.
Example 3. The state equation of an MTI system with
two states is given by
1
The notation R
×
(n+m)
2
denotes the space R
n+m times
z }| {
2×...×2
.
˙x
1
˙x
2
=
h
F
|
M (x
1
, x
2
)
i
=
F
1
x
2
,
1
x
1
f (2, 1, 1)
f (2,2,1)
f (1,2,1)f (1,1,1)
f (2,1,2) f (2, 2,2)
f (1,2,2)f (1,1,2)
x
2
x
1
x
2
1
x
1
=
=
f (1,1,1)+ f (1,2,1)x
1
+ f (2,1,1)x
2
+ f (2,2,1)x
1
x
2
f (1,1,2)+ f (1,2,2)x
1
+ f (2,1,2)x
2
+ f (2,2,2)x
1
x
2
.
The number of parameters of an MTI system
given by the numbers of elements in the tensors F
and G increases exponentially with the numbers of
states and inputs, i.e. the transition tensor F con-
tains n · 2
n+m
elements. This leads to problems in
memory demand when dealing with large models.
Decomposition methods can be used to reduce the
complexity of high dimensional models. Therefore,
a CP decomposition of the parameter tensors
F = [F
u
m
, . . . , F
u
1
, F
x
n
, . . . , F
x
1
, F
Φ
] · λ
F
, (26)
G = [G
u
m
, . . . , G
u
1
, G
x
n
, . . . , G
x
1
, G
Φ
] · λ
G
, (27)
is desired, which can be found for every MTI sys-
tem, (Kruppa and Lichtenberg, 2016). During simu-
lation, by using (15), the contracted product of the CP
decomposed MTI system (24) and (25) can be com-
puted very efficiently, since the monomial tensor is a
rank one tensor.
Example 4. For an MTI system with two states and
state equation
˙
x =
2x
2
− 5x
1
x
2
−x
1
+ 3x
2
− 4x
1
x
2
u
1
,
the factor matrices and the weighting vector of the
transition tensor F = [F
u
1
, F
x
2
, F
x
1
, F
Φ
] · λ
F
reads
F
x
1
=
1 0 0 1 0
0 1 1 0 1
, F
x
2
=
0 0 1 0 0
1 1 0 1 1
,
F
u
1
=
1 1 1 1 0
0 0 0 0 1
, F
Φ
=
1 1 0 0 0
0 0 1 1 1
,
λ
F
=
2 −5 −1 3 −4
T
.
4 FEEDBACK LINEARIZATION
This section highlights the most important features of
feedback linearization as described in (Isidori, 1995)
or (Khalil, 1996). The main idea of this method is to
design a state feedback controller for an input affine
nonlinear plant such that the reference behavior in
Feedback Linearization of Multilinear Time-invariant Systems using Tensor Decomposition Methods
235
Controller
Plant
r
y
x
u
Figure 2: Closed loop state feedback.
closed loop from reference input r to output y is linear
as shown in Figure 2.
Consider a nonlinear, input affine, single-input
single-output (SISO) system
˙
x = a(x) + b(x)u, (28)
y = c(x), (29)
with nonlinear functions a, b : R
n
→ R
n
and output
function c : R
n
→ R. It is assumed that the func-
tions are sufficiently smooth, which means that all
later appearing partial derivatives of the functions are
defined and continuous, (Khalil, 1996). A nonlinear
state feedback controller is constructed by, (Isidori,
1995)
u=
−
ρ
∑
i=0
µ
i
L
i
a
c(x) + µ
0
r
L
b
L
ρ−1
a
c(x)
, (30)
such that the closed loop shows a linear behavior
from r to y prescribed by the linear differential equa-
tion
µ
ρ
∂
ρ
∂t
ρ
y + µ
ρ−1
∂
ρ−1
∂t
ρ−1
y + . . . + µ
1
˙y + µ
0
y = µ
0
r. (31)
Without loss of generality the factor µ
ρ
is set to one.
The Lie derivative of a scalar function g(x) along a
vector field h(x) is defined as, (Isidori, 1995)
L
h
g(x) =
n
∑
i=1
h
i
(x)
∂g(x)
∂x
i
. (32)
An i-times application of the Lie derivative to a func-
tion is denoted by L
h
·· ·L
h
g(x) = L
i
h
g(x).
5 ARITHMETIC OPERATIONS
FOR POLYNOMIALS
To determine the Lie derivatives, multiplication and
differentiation of functions have to be computed. In
the following, these arithmetic operations are inves-
tigated, if the functions are polynomial and given in
terms of a tensor structure by a contracted product
of a parameter and a monomial tensor. A multilinear
function (22) in tensor representation is written as
h(x) =
h
H
|
M (x)
i
. (33)
The multiplication of two multilinear functions is
not a multilinear function anymore, since in general
higher order terms occur in the result. Because of
that, a representation of higher order polynomials in
the tensor structure has to be introduced.
Definition 9 (Polynomial in Tensor Form). A poly-
nomial with maximal order N of the monomials in n
variables x ∈ R
n
is given by
h(x) =
H
M
N
p
(x)
, (34)
with parameter tensor H ∈ R
×
(nN)
2
and the mono-
mial tensor M
N
p
(x) ∈ R
×
(nN)
2
, which is constructed
as rank 1 tensor, analogous to (23), by
M
N
p
(x)=
N
j=1
M (x)
=
1
x
n
,·· ·,
1
x
1
,·· ·,
1
x
n
,·· ·,
1
x
1
| {z }
N times
. (35)
A maximal order N of the monomials means that
variables with exponents up to N, i.e. x
N
i
could oc-
cur. Obviously by construction some monomials ap-
pear multiple times inside the monomial tensor. This
choice of the monomial tensor, which is not unique,
is not optimal regarding the storage effort but helps
developing the algorithms. This redundancy is still
acceptable, since the monomial tensor is a rank 1 ten-
sor. Using this tensor representation of multilinear
and polynomial functions, the aim here is to com-
pute the parameter tensor of the result of multiplica-
tion and differentiation, just by using the parameter
tensors of the operands, without evaluating the con-
tracted product with the monomial tensor.
5.1 Multiplication
With Definition 9 it is possible to derive the multipli-
cation based on the parameter tensors.
Proposition 5 (Multiplication in Tensor Form). The
multiplication of two polynomials in n variables of or-
ders N
1
and N
2
in tensor representation
h
1
(x) =
H
1
M
N
1
p
(x)
, (36)
h
2
(x) =
H
2
M
N
2
p
(x)
, (37)
with parameter tensors H
i
∈ R
×
(nN
i
)
2
and monomial
tensors M
N
i
p
(x) ∈ R
×
(nN
i
)
2
, i = 1, 2,
h
1
(x) · h
2
(x) =
H
1
◦ H
2
M
N
1
+N
2
p
(x)
, (38)
is a polynomial of order N
1
+ N
2
.
The proposition is proven in proof 2 in the Ap-
pendix. If the parameter tensors H
1
and H
2
are given
as CP tensors, the parameter tensor of their product
is efficiently computed by (11) – (14). Thus building
the full tensors of H
1
and H
2
is not required.
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
236

Example 5. The multiplication of two multilinear
functions with tensor representations
h
1
(x
1
, x
2
) = 1 + 2x
1
x
2
=
h
H
1
|
M (x
1
, x
2
)
i
=
1 0
0 2
1 x
1
x
2
x
1
x
2
, (39)
h
2
(x
1
, x
2
) = x
1
− 3x
1
x
2
=
h
H
2
|
M (x
1
, x
2
)
i
=
0 1
0 −3
1 x
1
x
2
x
1
x
2
. (40)
is given by
h(x
1
, x
2
) =
h
H
1
|
M (x
1
, x
2
)
i h
H
2
|
M (x
1
, x
2
)
i
=
H
1
◦ H
2
M
2
p
(x
1
, x
2
)
.
The result of the multiplication is a polynomial of
maximal order 2 as shown by the monomial ten-
sor M
2
p
(x
1
, x
2
) of the result. Computing the outer
product H = H
1
◦ H
2
gives the parameter tensor of
the result with slices
H(:, :, 1, 1) =
0 0
0 0
, H(:, :, 1, 2) =
1 0
0 2
,
H(:, :, 2, 1) =
0 0
0 0
, H(:, :, 2, 2) =
−3 0
0 −6
.
The evaluation of the parameter tensor H
1
◦ H
2
of the
multiplication and the monomial tensor gives
h(x)=
H
M
2
p
(x)
=x
1
− 3x
1
x
2
+ 2x
2
1
x
2
− 6x
2
1
x
2
2
,
which shows that the tensor representation of the re-
sult is computed correctly.
5.2 Differentiation
In this section the computation of the partial deriva-
tive of a polynomial in tensor representation (34) with
respect to one variable x
j
is investigated.
Proposition 6 (Differentiation in Tensor Form). The
partial derivative of a polynomial in n variables of
maximal monomial order N with respect to one vari-
able x
j
, j = 1, . . . , n in tensor representation is given
by
∂
∂x
j
h(x)=
∂
∂x
j
H
M
N
p
(x)
=
H
j
M
N
p
(x)
, (41)
with the parameter tensor of the differentiated func-
tion and Θ =
0 1
0 0
H
j
=
N
∑
k=1
H ×
kn− j+1
Θ ∈ R
×
nN
2
. (42)
The proof 3 of the proposition can be found in the
Appendix. Assuming the parameter tensor H is in CP
form, as desired the CP representation of H
j
is con-
structed using the factors of H only, without building
the full tensors, since the k-mode product is defined
for CP tensors as given in Proposition 4.
Example 6. Consider a polynomial with 2 variables
h(x) = 1 + 2x
1
+ 3x
2
+ 6x
1
x
2
=
h
H
|
M (x)
i
=
1 2
3 6
1 x
1
x
2
x
1
x
2
.
By applying (42) the parameter tensor of the differen-
tiated function with respect to x
1
results in
H
1
= H ×
2
Θ =
2 0
6 0
,
which describes the function
∂
∂x
1
h(x) =
h
H
1
|
M (x)
i
= 2 + 6x
2
.
The 2-mode multiplication with Θ maps the elements
of H belonging to the monomials x
1
and x
1
x
2
to the
monomials 1 and x
2
. All others are zero, which is ex-
actly the case when differentiating this function with
respect to x
1
.
The parameter tensor
H =
1 1 0 0
0 0 1 1
,
1 0 1 0
0 1 0 1
·
1 2 3 6
T
can be given in a CP tensor structure. By multiplying
the second factor matrix from the right by Θ, the CP
representation of the differentiated function reads
H
1
=
1 1 0 0
0 0 1 1
,
0 1 0 1
0 0 0 0
·
1 2 3 6
T
=
1 0
0 1
,
1 1
0 0
·
2 6
T
,
where the number of rank 1 components can be re-
duced by removing the zero columns of the factor ma-
trices to get a more efficient CP tensor representation.
5.3 Lie Derivatives
The multiplication and differentiation methods (38)
and (41) are used to compute the Lie derivative (32)
for the case that polynomials are given in CP form
h(x) =
H
M
N
p
(x)
, (43)
g(x) =
G
M
N
p
(x)
. (44)
Theorem 1 (Lie Derivative in Tensor Form). The ten-
sor representation of the Lie derivative (32) of the
scalar polynomial (44) along the polynomial vector
field (43) yields
L
l
h
g(x) =
D
L
H,G,l
M
N(l+1)
p
(x)
E
. (45)
with the parameter tensor
L
F,G,l
=
G for l =0,
n
∑
i=1
H
i
◦
N
∑
k=1
G×
kn−i+1
Θ
for l =1,
n
∑
i=1
H
i
◦
lN
∑
k=1
L
F,G,l−1
×
kn−i+1
Θ
else,
Feedback Linearization of Multilinear Time-invariant Systems using Tensor Decomposition Methods
237

with subtensor H
i
= H(:, . . . , :, i), where the last di-
mension of H is fixed.
In the Appendix the proof 4 of the theorem is given.
Example 7. The vector function
h(x
1
, x
2
) =
h
1
(x
1
, x
2
)
h
2
(x
1
, x
2
)
=
h
H
|
M (x
1
, x
2
)
i
composed of polynomials (39) and (40) has a param-
eter tensor
H
1
=H(:, :, 1) =
1 0
0 2
, H
2
=H(:, :, 2) =
0 1
0 −3
.
The first Lie derivative L
h
g(x) of the scalar function
g(x) = x
2
− x
1
x
2
=
h
G
|
M (x)
i
=
0 0
1 −1
1 x
1
x
2
x
1
x
2
,
along the vector field h(x) should be computed by op-
erational tensors. For comparison the Lie derivative
with the standard approach (32) gives
L
h
g(x) = h
1
(x)
∂
∂x
1
g(x) + h
2
(x)
∂
∂x
2
g(x)
= x
1
− x
2
− 3x
1
x
2
− x
2
1
+ 3x
1
1
x
2
− 2x
1
x
2
2
. (46)
With the method introduced in Theorem 1 the param-
eter tensor of the Lie derivative
L
H,G,1
= H
1
◦ (G ×
2
Θ) + H
2
◦ (G ×
1
Θ),
results in a fourth order tensor
L
H,G,1
(:, :, 1, 1)=
0 1
0 −3
, L
H,G,1
(:, :, 1, 2)=
0 −1
0 3
,
L
H,G,1
(:, :, 2, 1)=
−1 0
0 −2
, L
H,G,1
(:, :, 2, 2)=
0 0
0 0
.
From (45) follows that the monomial ten-
sor M
2
p
(x
1
, x
2
) for the Lie derivative is of maxi-
mal order 2. Evaluating the contracted product
of the parameter tensor with the monomial ten-
sor
L
H,G,1
M
2
p
(x
1
, x
2
)
shows that the result with
the operational tensor is equal to (46). Thus, the
parameter tensor is computed correctly.
6 FEEDBACK LINEARIZATION
FOR CP DECOMPOSED MTI
SYSTEMS
The controller design by feedback linearization intro-
duced in Section 4 is investigated in this section for
MTI systems with CP decomposed parameter tensors.
An input affine SISO MTI system is given by
˙
x = a(x) + b(x)u =
h
F
|
M(x, u)
i
=
h
A
|
M(x)
i
+
h
B
|
M(x)
i
u, (47)
y = c(x) =
h
G
|
M(x, u)
i
=
h
C
|
M(x)
i
. (48)
It is assumed that the system is controllable, observ-
able and feedback linearizable with well-defined rel-
ative degree ρ. Theorem 1 is used to compute the Lie
derivatives of the multilinear model functions in ten-
sor form. This leads to the following lemma.
Lemma 1 (MTI System Lie Derivatives). The Lie
derivative (32) of the multilinear output function
given by tensor C along the multilinear vector
field a(x) given by tensor A yields
L
l
a
c(x)=
n
∑
i=1
a
i
(x)
∂
∂x
i
L
l−1
a
c(x)
=
D
L
A,C,l
M
l+1
p
(x)
E
, (49)
with parameter tensor
L
A,C,l
=
C for l =0,
n
∑
i=1
A
i
◦(C×
n−i+1
Θ) for l =1,
n
∑
i=1
A
i
◦
l
∑
k=1
L
A,C,l−1
×
kn−i+1
Θ
else,
with l = 0, . . . , ρ and subtensor A
i
= A(:, . . . , :, i) of A.
Using the parameter tensor
L
B,A,C,l
=
n
∑
i=1
B
i
◦
l+1
∑
k=1
L
A,C,l
×
kn−i+1
Θ
!
, (50)
with B
i
= B(:, . . . , :, i), the Lie derivatives along b(x)
are given by
L
b
L
l
a
c(x)=
n
∑
i=1
b
i
(x)
∂
∂x
i
L
l
a
c(x)=
D
L
B,A,C,l
M
l+2
p
(x)
E
.
The representations of the Lie derivatives of the
system (47) and (48) follows obviously from Theo-
rem 1. Since all operations, i.e. summation, outer
product and k-mode product, used to get the param-
eter tensors of the Lie derivatives are introduced for
CP tensors, no full tensor has to be build during com-
putation of the Lie derivatives. This is important es-
pecially for large scale systems. With the tensor de-
scription of the Lie derivatives given in Lemma 1 the
controller law for feedback linearization can be con-
structed as shown in the following lemma.
Lemma 2 (MTI Feedback Linearization). The feed-
back linearizing controller for an input affine MTI
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
238
system given by (47) and (48) reads
u=
−
ρ
∑
i=0
µ
i
L
A,C,i
M
ρ+1
p
(x)
+ µ
0
r
D
L
B,A,C,ρ−1
M
ρ+1
p
(x)
E
, (51)
when the Lie derivatives are defined by parameter
tensors as in Lemma 1.
The proof 5 of the previous lemma is described
in the Appendix. Thus, the feedback linearizing con-
troller has got a fixed structure. The factors µ
i
and ten-
sors L
A,C,i
and L
B,A,C,ρ−1
have to be provided, to adapt
the controller for a given plant. Setting these param-
eters is like setting a static state feedback gain matrix
for pole placement in the linear case. The structure
of the controller for MTI systems is fixed and does
not depend on the plant. This structural invariance is
an advantage for application of the controller. Com-
pared to the general nonlinear case it is not necessary
to provide an arbitrary set of mathematical operations,
that depends on the plant model. Here it is limited to
the given structure and the operations can be defined
efficiently on the coefficient spaces.
7 COMPLEXITY ANALYSIS
In today’s applications systems get more and more
complex, like in smart grids or heating systems.
Plants in these application areas can be modeled by
MTI systems with a large number of states. With
dense parameter tensors these models can capture
very complex dynamics. But a large order n leads
to a very large number of system parameters in full
representations. The number of terms also in a sym-
bolic representation increases exponentially with the
number of states. Thus, for large scale systems a sys-
tem description is impossible because of curse of di-
mensionality. A system of order 100 has got more
than 10
32
terms in full representation, which does not
fit in memory anymore. The state space representa-
tion and thus the computation of a controller of such
big system is not possible in a symbolical way.
Tensor decomposition methods like CP decomposi-
tion allow to compute low rank approximations of the
parameter tensors. This breaks the curse of dimen-
sionality and allows an approximate representation of
large scale systems with a number of parameters that
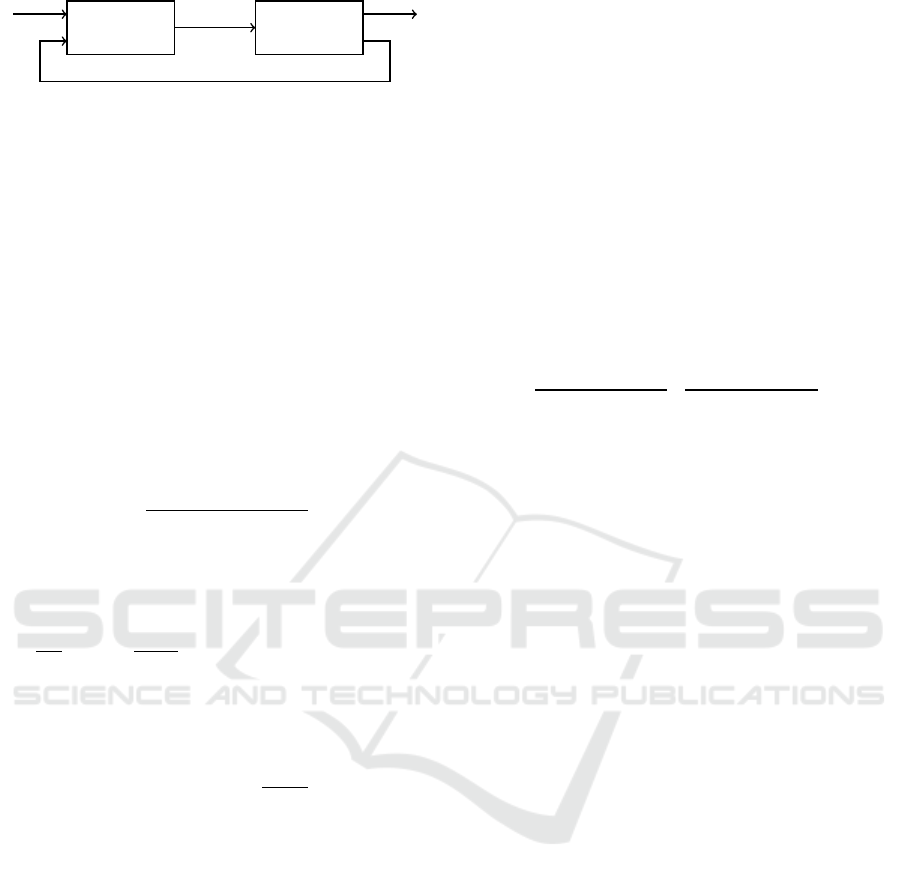
is lower by orders of magnitude. Figure 3 shows in
a logarithmic scale how the number of parameters in-
creases with the order of the system and the rank of
the parameter tensors.
Using low rank approximation techniques for pa-
rameter tensors, makes it possible to represent large
Figure 3: Number of parameter for MTI systems.
systems and to compute controllers as shown in this
paper. E.g. the number of values to be stored for a
system of order 100 is reduced from 10
32
to 6200 for
a rank 10 approximation, since the parameters scale
linearly with order and rank. The proposed feedback
linearization approach works with the decomposed
representations of the system and all operations are
defined for CP decomposed tensors such that no full
tensor representation has to be constructed during the
whole controller design process leading to a controller
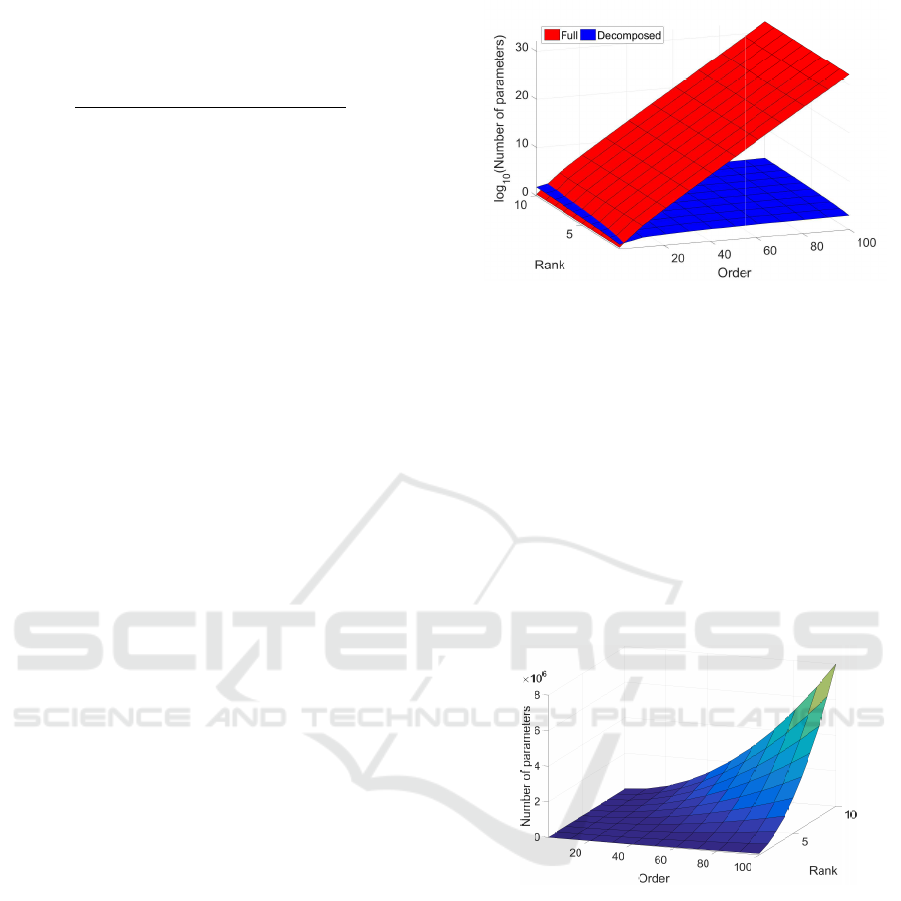
in a decomposed structure. The storage demand is
still capable as shown in Figure 4, where an upper
bound for the number of elements to be stored for the
parameter tensors of the controller are depicted.
Figure 4: Upper bound for number of parameters for a feed-
back linearizing controller of decomposed MTI systems.
The figure considers different orders and different
ranks of the system tensors A, B and C for a sys-
tem with relative degree of one. Often the results
can be represented by tensors of lower rank which
reduces the storage effort further. Also during appli-
cation the controller law can be evaluated based on
the decomposed factor matrices. This makes it pos-
sible to use this feedback linearizing scheme also for
large scale MTI systems, where the full representa-
tion can not processed but low rank approximations
exist. This break of the dimensionality problem for
large scale systems is the big advantage of the intro-
duced feedback linearization design approach by CP
decomposed tensors.
Feedback Linearization of Multilinear Time-invariant Systems using Tensor Decomposition Methods
239
8 APPLICATION
In this section the proposed method for feedback lin-
earization is applied first to a SISO, MTI system
with 2 states for giving all steps of the design pro-
cedure explicitly. Consider the system
˙x
1
˙x
2
=
2x
2
−x
1
+ 0.2x
1
x
2
+
0
1
u,
y = 1 + 2x
1
.
The systems belongs to the class of input affine MTI
systems (47) and (48) where the factor matrices are
represented as CP tensors
A =
0 1 0
1 0 1
,
1 0 0
0 1 1
,
1 0 0
0 1 1
·
2
−1
0.2
,
B =
1
0
,
1
0
,
0
1
· 1,
C =
1 1
0 0
,
0 1
1 0
·
2
1
.
To design the controller, the Lie derivatives of the sys-
tem must be derived. Using (49) the parameter tensors
of the Lie derivatives along a(x) in CP representation
are given by
L
A,C,1
=
0
1
,
1
0
,
1
0
,
1
0
· 4,
L
A,C,2
=
1 0
0 1
,
0 0
1 1
,
1 1
0 0
, ···
1 1
0 0
,
1 1
0 0
,
1 1
0 0
·
−4
0.8
resulting in the derivatives
L
a
c(x) =
L
A,C,1
M
2
p
= 4x
2
,
L
2
a
c(x) =
L
A,C,2
M
3
p
= −4x
1
+ 0.8x
1
x
2
.
The Lie derivatives along b(x) leads to L
b
c(x) = 0
and L
b
L
a
c(x) = 4 by the parameter tensors (50)
L
B,A,C,0
=
0
0
,
0
0
,
0
0
,
0
0
· 0,
L
B,A,C,1
=
1
0
,
1
0
,
1
0
,
1
0
,
1
0
,
1
0
· 4.
Because of L
b
L
a
c(x) = 4 6= 0 ∀x the relative degree ρ
of the system is two, which is equal to the number of
states. Thus the system has full degree and the zero
dynamics needs not to be checked. Additionally the
system is controllable and observable. In closed loop,
the linear behavior
µ
2
¨y + µ
1
˙y + µ
0
y = µ
0
r
is desired. As an example µ
1
= µ
0
= 10 and µ
2
= 1
are chosen. Using the parameter tensors of the
Lie derivatives, the feedback linearizing controller is
given by
u=
−
µ
0
C+µ
1
L
A,C,1
+µ
2
L
A,C,2
M
3
p
(x)
+ µ
0
r
L
B,A,C,1
M
3
p
(x)
=−
10 + 16x
1
+ 40x
2
+ 0.8x
1
x
2
+ 10r
4
.
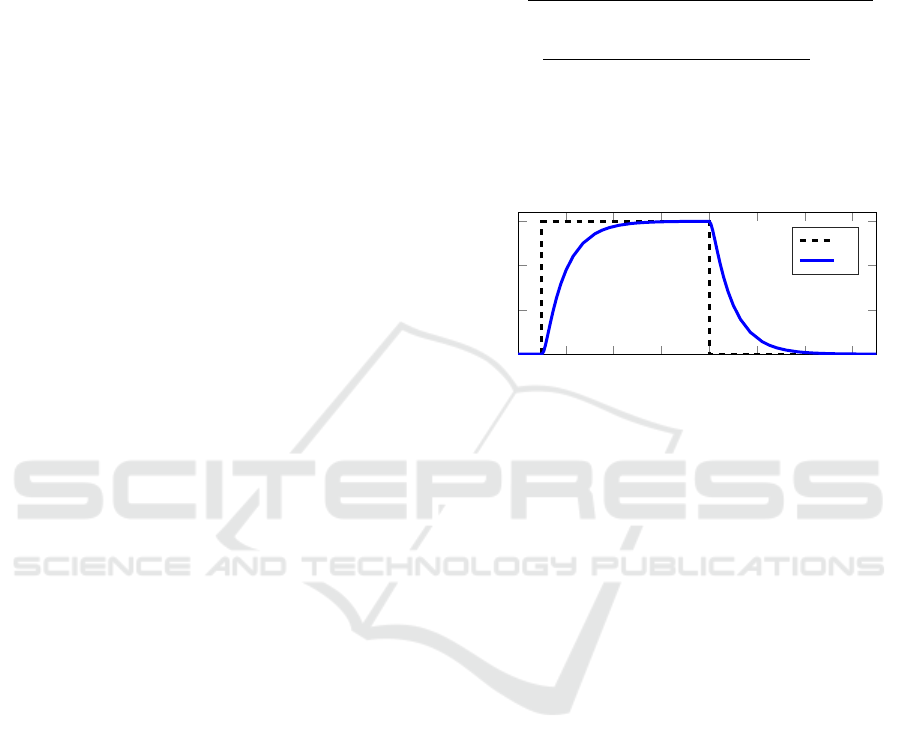
Figure 5 shows the closed loop simulation result
with x
0
=
−0.5 0
T
for a step change in reference
signal r. The system behaves as the specified 2
nd
or-
der linear system.
0 2 4
6
8 10 12 14
0
1
2
3
Time [s]
r
y
Figure 5: Closed loop simulation.
9 CONCLUSION AND OUTLOOK
In this paper a feedback linearization approach for
CP decomposed MTI systems was derived. The con-
troller is determined numerically without any sym-
bolic computation. Therefore multiplication and dif-
ferentiation of polynomial functions are investigated
that are necessary for computation of the Lie deriva-
tives of the system. It is shown that the parameter ten-
sors of the result of these operations can be computed
efficiently by the parameter tensors of the operands if
in CP. With that the controller law of the feedback lin-
earizing controller is computed. This is an important
advantage when focusing large systems where a stan-
dard representation of right hand sides is not possible,
since the use of decomposition techniques leads to a
significant reduction in storage demand by orders of
magnitude. This construction of the linearizing feed-
back gain leads to a controller with a structure that is
independent of the plant. Only a parameter set has to
be computed to use the controller for a special appli-
cation.
Here the standard method of feedback lineariza-
tion for SISO systems is investigated. This approach
could be extended to MIMO systems. From a math-
ematical point of view it is interesting to use other
tensor decomposition techniques for the design algo-
rithm like Tensor Trains, (Oseledets, 2011). Another
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
240

interesting point is to compare the proposed method
to other approaches of feedback linearization to de-
termine a threshold for the system size, where other
methods fail and the tensor methods is the only appli-
cable algorithm.
ACKNOWLEDGEMENTS
This work was partly sponsored by the project OB-
SERVE of the Federal Ministry of Economic Affairs
and Energy, Germany (Grant No.: 03ET1225B).
REFERENCES
Bader, B. W., Kolda, T. G., et al. (2015). Matlab tensor
toolbox version 2.6. Available online.
Cichocki, A., Mandic, D. P., Phan, A. H., Caiafa, C. F.,
Zhou, G., Zhao, Q., and Lathauwer, L. D. (2014).
Tensor decompositions for signal processing applica-
tions from two-way to multiway component analysis.
CoRR, abs/1403.4462.
Cichocki, A., Zdunek, R., Phan, A., and Amari, S. (2009).
Nonnegative matrix and tensor factorizations. Wiley,
Chichester.
Deutscher, J. (2005). Input-output linearization of nonlin-
ear systems using multivariable legendre polynomials.
Automatica, 41:299–304.
Ekman, M. (2005). Modeling and Control of Bilinear Sys-
tems: Application to the Activated Sludge Process.
PhD thesis, Uppsala University.
Grasedyk, L., Kressner, L., and Tobler, C. (2013). A lit-
erature survey of low-rank tensor approximation tech-
niques. GAMM-Mitteilungen, 36:53–78.
Hackbusch, W. (2012). Tensor Spaces and Numerical Ten-
sor Calculus, volume 42 of Springer Series in Com-
putational Mathematics. Springer-Verlag Berlin Hei-
delberg.
Isidori, A. (1995). Nonlinear Control Systems. Springer-
Verlag New York, Inc., Secaucus, NJ, USA, 3rd edi-
tion.
Khalil, K. H. (1996). Nonlinear Systems. Prentice-Hall,
Inc.
Kolda, T. and Bader, B. (2009). Tensor decompositions and
applications. SIAM Review, 51(3):455–500.
Kruppa, K. and Lichtenberg, G. (2016). Comparison of cp
tensors, tucker tensors and tensor trains for represen-
tation of right hand sides of ordinary differential equa-
tions. In Workshop on Tensor Decomposition and Ap-
plications, Leuven.
Kruppa, K., Pangalos, G., and Lichtenberg, G. (2014). Mul-
tilinear approximation of nonlinear state space mod-
els. In 19th IFAC World Congress, Cape Town, pages
9474–9479. IFAC.
Lichtenberg, G. (2010). Tensor representation of boolean
functions and zhegalkin polynomials. In International
Workshop on Tensor Decompositions, Bari.
M
¨
uller, B. and Deutscher, J. (2005). Approximate input-
output linearization using l2-optimal bilinearization.
In Proceedings of the 44th IEEE Conference on De-
cision and Control and the European Control Confer-
ence.
M
¨
uller, T., Kruppa, K., Lichtenberg, G., and R
´
ehault,
N. (2015). Fault detection with qualitative models
reduced by tensor decomposition methods. IFAC-
PapersOnLine, 48(21):416 – 421. 9th IFAC Sympo-
sium on Fault Detection, Supervision and Safety for
Technical Processes, SAFEPROCESS.
Oseledets, I. (2011). Tensor-train decomposition. SIAM
Journal of Scientific Computing, 33(5):2295–2317.
Pangalos, G. (2016). Model-based controller design meth-
ods for heating systems. Dissertation, TU Hamburg,
Hamburg.
Pangalos, G., Eichler, A., and Lichtenberg, G. (2015). Hy-
brid Multilinear Modeling and Applications, pages
71–85. Springer International Publishing, Cham.
R
¨
obenack, K. (2005). Automatic differentiation and non-
linear controller design by exact linearization. Future
Generation Computer Systems, 21:1372–1379.
Vervliet, N., Debals, O., Sorber, L., Van Barel, M., and
De Lathauwer, L. (2016). Tensorlab 3.0. Available
online.
APPENDIX
In the Appendix the proofs of the arithmetic oper-
ations, i.e. multiplication, differentiation and Lie
derivative, for polynomials in tensor representation is
given. Furthermore, the proofs of th eouter product of
CP tensors and the control law for the feedback lin-
earizing controller for CP decomposed MTI systems
are presented here.
Proof of the Outer Product
Proof 1. Inserting the elementwise descriptions of X
and Y into the outer product (2), leads to
z(i
1
, . . . , i
n
, j
1
, . . . , j
m
) = x(i
1
, . . . , i
n
)y( j
1
, . . . , j
m
)
=
r
X
∑
k=1
λ
X
(k)u
1
(i
1
, k)···u
n
(i
n
, k)
·
r
Y
∑
k=1
λ
Y
(k)v
1
( j
1
, k)···v
m
( j
m
, k)
=λ
X
(1)λ
Y
(1)u
1
(i
1
,1)·· ·u
n
(i
n
,1)v
1
( j
1
,1)·· ·v
m
( j
m
,1)
+λ
X
(1)λ
Y
(2)u
1
(i
1
,1)·· ·u
n
(i
n
,1)v
1
( j
1
,2)·· ·v
m
( j
m
,2)
+ ··· + λ
X
(r
X
)λ
Y
(r
Y
)u
1
(i
1
, r
X
)· ·· v
m
( j
m
, r
Y
).
Comparing this representation of the outer product
with the elementwise description of the resulting ten-
Feedback Linearization of Multilinear Time-invariant Systems using Tensor Decomposition Methods
241

sor in CP decomposition
z(i
1
, . . . , j
m
) =
r
X
+r
Y
∑
k=1
λ
Z
(k)w
1
(i
1
, k)···w
n+m
( j
m
, k),
leads to the factors in (12) to (14).
Proof of the Multiplication
Proof 2. Considering (35) the monomial tensor of the
result can be decomposed by
H
1
◦H
2
M
N
1
+N
2
p
(x)
=
H
1
◦H
2
M
N
1
p
(x) ◦M
N
2
p
(x)
.
Using the elementwise representations (2) and (4) of
outer and contracted product and rearranging gives
H
1
◦ H
2
M
N
1
p
(x) ◦ M
N
2
p
(x)
=
2
∑
i
1
=1
·· ·
2
∑
i
nN
1
=1
2
∑
j
1
=1
·· ·
2
∑
j
nN
2
=1
h
1
(i
1
, . . . , i
nN
1
)h
2
( j
1
, . . . , j
nN
2
)
· m
N
1
p
(x)(i
1
, . . . , i
nN
1
)m
N
2
p
(x)( j
1
, . . . , j
nN
2
)
=
2
∑
i
1
=1
·· ·
2
∑
i
nN
1
=1
h
1
(i
1
, . . . , i
nN
1
)m
N
1
p
(x)(i
1
, . . . , i
nN
1
)
·
2
∑
j
1
=1
·· ·
2
∑
j
nN
2
=1
h
2
( j
1
, . . . , j
nN
2
)m
N
2
p
(x)( j
1
, . . . , j
nN
2
)
=
H
1
M
N
1
p
(x)
·
H
2
M
N
2
p
(x)
= h
1
(x) · h
2
(x)
Proof of the Differentiation
Proof 3. All terms depending on the variables x
i
,
with i = 1, . . . , n of a polynomial in tensor form are
inside the monomial tensor. The parameter tensor H
contains constant elements only. Thus, the partial
derivative of the monomial tensor is investigated first.
In the multilinear case the partial derivative with re-
spect to one variable x
j
can be found using the prod-
uct rule of differentiation as stated in Proposition 1
∂
∂x
j
M(x)= [w
1
, . . . , w
n
] =
∂
∂x
j
1
x
n
◦ ··· ◦
1
x
1
=
1
x
n
◦·· ·◦
1
x
j+1
◦
0
1
◦
1
x
j−1
◦·· ·◦
1
x
1
. (52)
The factor matrices of the derivative of the monomial
tensor reads
w
i
=
0 1
T
, for i = n − j + 1,
1 x
n−i+1
T
, else.
The differentiation influences the dimension belong-
ing to the differentiation variable x
j
of the monomial
tensor only. Thus, the differentiation can be expressed
in terms of a k-mode product
∂
∂x
j
M(x) = M(x) ×
n− j+1
Θ
T
,
setting the factor matrix of M(x) belonging x
j
to
0 1
T
.
Since the partial derivative can be found for the mul-
tilinear monomial tensor, the concept is extended to
polynomials with higher monomial orders N ≥ 1. In
contrast to the multilinear case, the variable x
j
does
not occur in one factor matrix only but in N factor ma-
trices. According to the product rule of differentiation
the differentiation of M
N
p
(x) leads to
∂
∂x
j
M
N
p
(x) =
N
∑
k=1
h
w
k
1
, . . . , w
k
nN
i
,
with
w
k
i
=
0 1
T
, for i = nk − j + 1,
1 x
nk−i+1
T
, else.
As before, this change in the factor matrices can be
expressed by k-mode product leading to the partial
derivative of the monomial tensor
∂
∂x
j
M
N
p
(x) =
N
∑
k=1
M
N
p
(x) ×
kn− j+1
Θ
T
. (53)
With the derivative of the monomial tensor (53) the
derivative of the function is given by
∂
∂x
j
H
M
N
p
(x)
=
*
H
N
∑
k=1
M
N
p
(x) ×
kn− j+1
Θ
T
+
!
=
H
j
M
N
p
(x)
. (54)
To find the parameter tensor H
j
, (54) can be written
as
*
H
N
∑
k=1
M
N
p
(x) ×
kn− j+1
Θ
T
+
= (55)
N
∑
k=1
H
M
N
p
(x) ×
kn− j+1
Θ
T
,
because of the linearity property of the inner product.
The elements of the k-mode product read
M
N
p
(x) ×
l
Θ
T
(i
1
, . . . , l, . . . , i
nN
)
= m
N
p
(i
1
, . . . , 1, . . . , i
nN
)Θ
T
(l, 1),
because Θ
T
(l, 2) = 0, l = 1, 2. With that, the terms of
the sum in (55) are written as
H
M
N
p
(x) ×
l
Θ
T
=
2
∑
i
1
=1
·· ·
2
∑
i
nN
=1
h(i
1
, . . . , i
nN
)m
N
p
(i
1
, . . . ,1, . . . , i
nN
)Θ
T
(l,1).
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
242

The aim is to isolate the monomial tensor on the right
side of the contracted product such that
H
M
N
p
(x) ×
l
Θ
T
!
=
˜
H
M
N
p
(x)
=
2
∑
i
1
=1
·· ·
2
∑
i
nN
=1
˜
h(i
1
, . . . , i
nN
)m
N
p
(i
1
, . . . , i
nN
).
Therefore, the elements of
˜
H are given by
˜
h(i
1
, . . . ,i
l
, . . . , i
nN
)=
(
h(i
1
, . . . ,2, . . . ,i
nN
), for i
l
=1,
0 , for i
l
=2,
since
2
∑
i
l
=1
h(i
1
, . . . ,i
l
, . . . ,i
nN
)Θ
T
(l,1) = h(i
1
, . . . ,2, . . . , i
nN
).
Using Definition 4 of the k-mode product, the param-
eter tensor
˜
H can be directly computed by
˜
H = H ×
l
Θ,
leading to
H
M
N
p
(x) ×
l
Θ
T
=
H ×
l
Θ
M
N
p
(x)
.
Inserting this to (55) shows that the partial derivative
of a polynomial h(x) is computed by
∂
∂x
j
H
M
N
p
(x)
=
N
∑
k=1
H ×
kn− j+1
Θ
M
N
p
(x)
=
*
N
∑
k=1
H ×
kn− j+1
Θ
M
N
p
(x)
+
,
such that the parameter tensor of the derivative reads
H
j
=
N
∑
k=1
H ×
kn− j+1
Θ.
Proof of the Lie Derivative
Proof 4. The first Lie derivative, i.e. l = 1, of g(x)
along h(x) is defined by
L
h
g(x) =
n
∑
i=1
h
i
(x)
∂
∂x
i
g(x). (56)
Since the scalar function g(x) is given as tensor func-
tion, equation (41) is applied to get the partial deriva-
tive
∂
∂x
i
g(x) =
*
N
∑
k=1
G×
kn−i+1
Θ
M
N
p
(x)
+
, i =1, . . . , n.
The multiplication with h
i
(x) =
H
i
M
N
p
(x)
,
where i = 1, . . . , n using (38) yields
h
i
(x)
∂
∂x
i
g(x) =
*
H
i
◦
N
∑
k=1
G×
kn−i+1
Θ
!
M
2N
p
(x)
+
.
Summing up these elements to get the Lie deriva-
tive (56) leads to
L
h
g(x) =
n
∑
i=1
*
H
i
◦
N
∑
k=1
G×
kn−i+1
Θ
!
M
2N
p
(x)
+
=
*
n
∑
i=1
H
i
◦
N
∑
k=1
G×
kn−i+1
Θ
!
M
2N
p
(x)
+
.
This approach is extended to multiple Lie derivatives
along h(x) as given by (45) for arbitrary l ∈ N by
L
l
h
g(x) =
n
∑
i=1
h
i
(x)
∂
∂x
i
L
l−1
h
g(x)
=
n
∑
i=1
H
i
M
N
p
(x)
·
*
lN
∑
k=1
L
H,G,l−1
×
kn−i+1
Θ
M
lN
p
(x)
+
=
*
n
∑
i=1
H
i
◦
lN
∑
k=1
L
H,G,l−1
×
kn−i+1
Θ
!
M
(l+1)N
p
(x)
+
.
Proof of the Feedback Linearizing
Controller
Proof 5. Inserting the tensor representation of the
Lie derivatives defined in Lemma 1 into the controller
function (30) and rearranging leads to
u=
−
ρ
∑
i=0
µ
i
L
A,C,i
M
i+1
p
(x)
+ µ
0
r
D
L
B,A,C,ρ−1
M
ρ+1
p
(x)
E
=
−
ρ
∑
i=0
µ
i
L
A,C,i
M
ρ+1
p
(x)
+ µ
0
r
D
L
B,A,C,ρ−1
M
ρ+1
p
(x)
E
.
Feedback Linearization of Multilinear Time-invariant Systems using Tensor Decomposition Methods
243
