
A Spatial Motion Control to Transfer an Object
between a Pair of Air Jet
Kazuki Yoshinaga
1
, Satoshi Iwaki
1
, Naoki Tsuchihashi
1
, Nobukado Abe
1
, Tetsushi Ikeda
1
,
Toshiharu Kosaku
1
and Takeshi Takaki
2
1
Systems Engineering Robotics Laboratory, Graduate School of Information Science and Technology,
Hiroshima City University, Asaminami, Hiroshima, Hiroshima Prefecture, Japan
2
Hiroshima University, Graduate school of Engineering, Hiroshima, Japan
Keywords: Air Jet Manipulation, 3D Space, Object, Relay Motion.
Abstract: We propose a method in which multiple nozzles are arranged consecutively along a conveying line and an
object can be relayed one after another. In this paper, as a most essential technology for such a conveyor, we
focus on the transferring control of the object between a pair of air jet on a vertical plane. We propose a
relaying control method based on some natural behaviours of an object in a fluid field where two air jet
streams collide. Some successful experiment results are shown.
1 INTRODUCTION
Non-contact object manipulation technology using
air jets has excellent features such as cleanness and
no need for a transmission mechanism. It has been
extensively studied for some years mainly aiming at
an application to a conveying system for relatively
smaller and lighter objects such as fruits or vegetable.
In a three-dimensional space, the three translational
DOF control method using a single air jet nozzle
mounted on a pan-tilt actuator has been proposed
(Becker, A. et al., 2009). In (Becker, A. et al., 2009),
it is possible to freely control the translational 3-DOF
within the range where the object can be held by the
Coanda effect. However, since the range in which an
object can be held against gravity is at most about 40
degrees, the driving range is inherently narrow. In
order to solve this problem, in this paper we propose
a method in which multiple nozzles are continuously
arranged along a conveyance line, and an object is
relayed one after another on each air jet stream.
Especially we focus on a control method to transfer
an object between a pair of air jet on a vertical plane,
which is the most fundamental problem to realize
such a transport system.
2 RELATED RESEARCH
2.1 On a 2D Plane
On a flat plane, the 3-DOF (two translational DOF +
one rotational DOF) control method for a single
object by changing the flow rate and angle of four air
jet nozzles has been proposed (Matsushita et al.,
2014) (Matsushita et al., 2016). In these technologies,
wind force applied to an object is approximated as a
linear lumped constant system without distance
dependence. And because it is unilateral actuation,
they prepared an air jet nozzle which is one or more
than the object control degree of freedom, and solved
this redundant DOF problem by linear programming.
Eventually the feedback controllers were
independently adopted for each DOF.
2.2 In a 3D Space
In three-dimensional space, a 3-DOF operation
technique (Becker, A. et al., 2009) by a single air jet
nozzle mounted on a pan tilt actuator has been
proposed. The decisive difference from the above
two-dimensional plane problem is to actively utilize
the Coanda effect. The Coanda effect is a
hydrodynamic property as represented a phenomena
in which a smooth convex shaped object in a jet
stream will stay in its stream. The object can be
Yoshinaga, K., Iwaki, S., Tsuchihashi, N., Abe, N., Ikeda, T., Kosaku, T. and Takaki, T.
A Spatial Motion Control to Transfer an Object between a Pair of Air Jet.
DOI: 10.5220/0006856801310135
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 2, pages 131-135
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
131

passively floated in the air because the wind force,
gravity force and the restoring force by this Coanda
effect are naturally balancing. Then, by moving the
pan tilt actuator, two argument angles on a spatial
polar coordinate system are actively controlled. On
the other hand, regarding the jet stream direction, a
position feedback control system is constructed in
which the distance between the nozzle and the object
is measured and the air jet flow rate is manipulated as
a control input. In this way, total translational 3
degrees of freedom is actively controlled. However,
with this method, since the object can be lifted only
in a narrow range about 40 degrees where the vertical
component of the Coanda force is larger than the
gravity. This is a fatal problem as a conveying system.
In this paper, to solve this problem, we propose a
method in which multiple nozzles are continuously
arranged along a conveyance line, and an object is
relayed one after another on each air jet stream.
3 OUTLINE AND PROBLEM
SETTING OF PROPOSED
METHOD
3.1 Basic Idea and Conveyance Image
Here a system equipped with an active air jet nozzle
and a distance sensor mounted on a pan-tilt actuator
is called "one nozzle control module" (Fig.1). Prepare
N "modules" and connect them from module 1 to
module N along a given object transport path. Fig.2
shows an image of such a system where an object is
relayed (M denotes a module).
In order to realize such a transportation system, it is
essential to create a relay control method between a
pair of air jet nozzle in a vertical plane. In the
following, we formulate this problem.
3.2 Problem Setting
Fig.3 is a diagram showing the experimental
coordinate system of this time taking the state of step
2 (Fig.2) as an example. In a vertical YZ plane as
shown in Fig.3, let’s consider that a spherical object
is moved horizontally from the start point
to the
goal point
by using two air jet nozzles separated
by a distance [mm]. Our problem here is to
determine the air jet nozzle angles
,
and the air jet
flow rates
(proportional solenoid valve supply
voltage).
Figure 1: Configuration of "one nozzle control module".
Figure 2: An image of object transportation.
Figure3: Configuration of the experiment system (The
angle is positive for clockwise rotation).
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
132
4 PRELIMINARY EXPERIMENT
4.1 Purpose
In addressing the above problem, the most difficult
challenge would be a collision between two air jet
streams, which probably generates turbulence.
Regarding a motion of an object in a single air jet
stream, hydrodynamic analysis is possible to some
extent, and there is a model-based control approach
(Becker, A. et al., 2009). However, neither theory nor
experiments have been reported on a behaviour of an
object in a turbulent field where two air jets collide,
therefore there have been absolutely no idea how to
address it. Thus, in order to get a hint for the problem,
we first decided to observe natural phenomena as it is.
Namely, as a preliminary experiment, we tried to
investigate the behaviour of the object in the
confluence area between the two air jets under a
condition that the two air jet flow rates are constant.
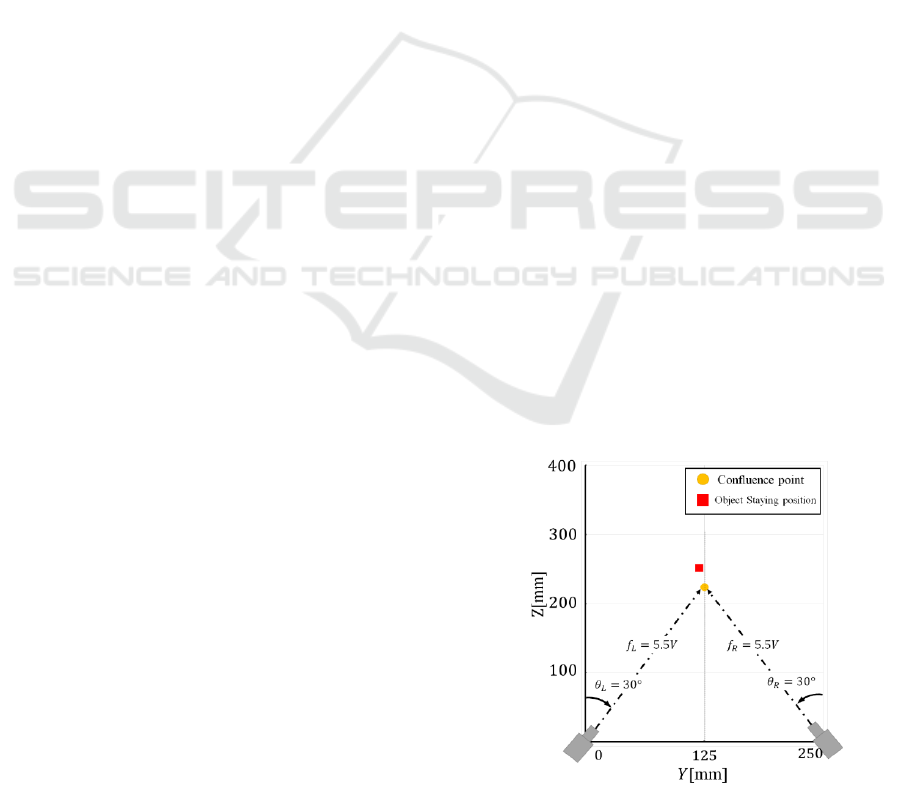
4.2 Preliminary Experiment Content
4.2.1 2 Observation of Object Behaviour at
the Confluence Area
Experiments were conducted to measure the object
levitation steady position in the state of collision
between the two air jet flow rates
and the
angles (
as parameters. An example is shown
below. Fig. 4 shows the results when the input voltage
5.5[V] and the injection angle
=
60[deg].From this result, it is possible to float by the
Coanda effect even in a fluid field where two jet
streams merge. And also, it was confirmed that the
resultant force applied to the object from the two air
jets can be roughly handled as a vector in a linear
lumped constant system.
4.2.2 An Experiment of the Object Relay by
a Passive and Heuristic Method
According to the above primary experiment, it was
confirmed that it is possible to hold an object at the
confluence area of two air jets, so next experiments
are performed to change these nozzle angles. As
shown in Fig.2, under the condition that the two air
jet flow rates are constant or zero, we conducted a
simple and heuristic experiment as follows;
(1) The left nozzle passively holds the object
vertically.
(2) Its angle slowly tilts toward the right nozzle
while the right nozzle is waiting for the object in
the intermediate point with the same air jet flow
rate.
(3) When the left air jet reaches the intermediate
point, then its air jet turns off and
simultaneously the right nozzle starts to
clockwisely rotate.
As shown in Fig. 5, immediately after the
confluence of the two air jets, Z has shown severe
vibrations with a maximum amplitude of about 180
mm. And after that, the vibration amplitude
gradually decreased passively due to air friction
and finally the success of the relay motion was
confirmed. And we can see that Y almost perfectly
synchronized with the movement of
. In this
passive and heuristic experiment, the relay
operation success rate was 7 out of 10 times (70%).
5 PROPOSED CONTROL
METHOD
5.1 Approach to Problem Solving
The above preliminary experiments are based on
simple natural phenomena where there is no artificial
control for the air jet. Here, we aim to realize more
stable relay operation by adding active feedback
control. Based on the preliminary experiment results,
we expected that regarding the horizontal direction,
the object can be passively stabilized by the Coanda
effect. Simultaneously regarding the vertical
direction, we expected that the feedback control can
work to stabilize the position utilizing the two air jet
resultant force. Specifically, we propose the
following three policies based on the assumption of
the lumped constant system.
Figure 4: Position of the levitated object and confluence
point of the two air jets.
A Spatial Motion Control to Transfer an Object between a Pair of Air Jet
133

(Policy 1) The two air jet nozzle angles are
manipulated assuming that the object will stay near
the confluent point thanks to the Coanda effect.
(Policy 2) The flow rate of each air jet nozzle is
controlled so that the horizontal component of the
resultant force of the wind forces at the confluence
point is always balanced to zero.
(Policy 3) Regarding the vertical direction, the flow
rate of each air jet nozzle is feedback controlled so
that the vertical component of the resultant force and
the gravity are balanced.
5.2 Proposed Algorithm
Based on the above policy, we created our relay
control algorithm as follows.
(i) Determination of
,
From the policy 1, the angle of each nozzle is
calculated from the object position target value
and the module-to-module distance, as
shown in the following expression and Fig. 3.
(1)
Where
and
when the object should
be horizontally moved with a constant speed
.
(ii) Determination of
From the policy 2, each air jet flow rate is set so that
the Y direction resultant force is constantly cancelled
as follows;
(2)
Further, from the policy 3, the resultant force in the Z
direction
is determined using a PID controller as
follows;
(3)
where PID denotes the function of the PID
compensator and
is a bias force to cancel
the gravity force (m is a mass of the object).
(4)
Accordingly, by simultaneously solving the
equations (3) and (4),
and
are calculated as
follows;
(5)
(6)
This is our proposed relay control algorithm.
6 DEMONSTRATION
EXPERIMENT
6.1 Outline of Experiment
In order to demonstrate the validity of the proposed
algorithm, an experimental system was constructed
(Fig. 6, Fig. 7). In this experiment, a ball with a
diameter of 100 [mm] and a weight of 10.24 [g] was
chosen and the module-to-module distance was 250
[mm]. In addition, we set the height h = 230. We tried
10 times and recorded the movement trajectory of the
object with a camera senor.
6.2 Experimental Results and
Discussion
The experiment results are shown in Fig 8. When
comparing with the results of 4.4.2 in Fig 5, we can
confirm that in the passive control experiment, the
maximum vibration amplitude in the Z direction is
about 180 [mm], and in the proposed method, it is
reduced to about 100 [mm]. And also we can confirm
that height of the object Z accurately follows its target
value h = 230mm. And as a result, the success rate of
the relay operation also are improved from 70 [%] to
80 [%].
7 CONCLUSION
Aiming at a long distance and non-contact conveyor
system, we have proposed an air jet manipulation
system in which multiple nozzles are continuously
arranged along a conveyance line, and an object is
relayed one after another on each air jet stream.
Especially, we focused on a control method to
transfer an object between a pair of air jet on a vertical
plane. Our experimental results are never satisfactory
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
134

so far, nevertheless we can confirm the qualitative
validity of our proposed method. In the future, we will
improve the method by decreasing the influence of
the turbulence generated by the air jet collision.
REFERENCES
Becker, A., et al., Automated Manipulation of Spherical
Objects in Three Dimensions Using A Gimbaled Air
Jet, Proc. of IROS 2009, pp.781-786.
Matsushita, Sugiyama, et al., “Contactless object
manipulation using multiple air jets on planar surface
(Experimental case studies for small control range with
continuous air jets),” Transactions of the JSME, Vol.80,
No.817, 2014.
Matsushita, Tsuchihashi, Iwaki, Takaki, “Contactless
object manipulation using multiple air jets on planar
surface (Experimental case studies of control method
for the multiple objects using four air jets
nozzles)”DOI:10.1299/transjsme.15-00459, 2016
Yamamoto, Takaki, et al.: Non-contact manipulation on flat
plate using air-jet streams, Transactions of the RSJ,
Vol.27, 2009.
Iwaki, Morimasa, Noritsugu, Kobayashi, Contactless
Manipulation of an Object on a Plane Surface using
Multiple Air Jets, Proc. of ICRA 2011, pp.3257-3262.
Figure 5: Experiment results with the passive and heuristic
method.
Figure 6: An overview of "one nozzle control module".
Figure 7: The object and the relaying system.
Figure 8: Experiment results with the proposed method.
A Spatial Motion Control to Transfer an Object between a Pair of Air Jet
135
