
Accurate Pose Estimation of a Hand-held RGBD Camera based on
Sub-volume Matching for 3D Modeling
Eung-su Kim and Soon-Yong Park
School of Computer Science and Engineering, Kyungpook National University, 80, Daehak-ro, Buk-gu, Daegu, South Korea
Keywords:
3D Registration, Subvolume, Pose Estimation.
Abstract:
The smoothness of the result of full body 3D reconstruction, also known as 360
◦
reconstruction using a single
hand-held sensor depends on the accuracy of the pose estimation. In this paper, we present a new idea for
accurate pose estimation of such a single hand-held RGBD sensor based on subvolumetric reconstruction.
In our method, we first estimate initial pose of both RGB and depth sensors through 3D coarse registration.
Thereafter, in the precision matching step, we select only the keyframes for matching and estimate relative
pose between them based on registration refinement. If there is a large pose estimation error between the
keyframes, a subvolume is constructed using data of adjacent frames of each keyframe, and refine the final
relative pose between keyframes using subvolume estimations. A series of 3D reconstruction experiments are
preformed to evaluate the accuracy of the estimated pose.
1 INTRODUCTION
The rapid development of low-cost commercial sen-
sors, such as Microsoft’s Kinect, Intel realSense, and
Asus Xtion Pro has resulted in broadening the re-
search areas of modern computer vision into certain
new levels. Combination of such sensors with more
powerful graphics processing units (GPU) have pro-
duced many compelling results, particularly in the
fields of dense 3D reconstruction, simultaneous lo-
calization and mapping (SLAM), augmented reality
(AR), and structure from motion (SfM). KinectFu-
sion (Newcombe et al., 2011) is an algorithm which
permits real-time, dense volumetric 3D reconstruc-
tion of complex room-sized scenes using a hand-held
Kinect depth sensor. The method uses a projection
based iterative closest point (ICP) algorithm to esti-
mate the sensor position and Truncated Signed Dis-
tance Function(TSDF) is used to facilitate the fusion
of a large number of depth data used in 3D recon-
Figure 1: Flowchart of sensor initial pose estimation and
3D model reconstruction using a depth image.
struction(Nießner et al., 2013; Dai et al., 2017a).
This method has a high processing speed due to
low complexity of computation, but a relatively low
performance pose estimation. As a solution, Dai
et al. introduced an optimization method based on
bundle adjustment using two-dimensional and three-
dimensional data (Dai et al., 2017b). However, bun-
dle adjustment method requires more processing time
once the number of input points increases. As a so-
lution, the authors have divided the number of frames
into local areas (chunks), and performed chunk wise
pose estimations. Selected keyframes that represent
each area are again optimized using bundle adjust-
ment. Maier et al. used a submap-based bundle ad-
justment (Maier et al., 2014). The data obtained at
a similar position is determined as one submap, and
the sensor pose is optimized within the submap. The
combination of submaps are then globally optimized
using overlapped features. However, 2D feature-
based method has low accuracy in lousy illumination
environment and selecting proper correspondences is
ambiguous. To overcome these drawbacks, we pro-
pose a pose estimation and refinement method using
keyframes and subvolumes. In our approach, we first
estimate initial pose at every viewpoint using volu-
metric and projection-based 3D registration. Then we
select an n number of keyframes among the view-
points, and refine their pose using initial pose estima-
tions.
332
Kim, E-s. and Park, S-Y.
Accurate Pose Estimation of a Hand-held RGBD Camera based on Sub-volume Matching for 3D Modeling.
DOI: 10.5220/0006857903320335
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 1, pages 332-335
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 INITIAL POSE ESTIMATION
USING REAL-TIME 3D
REGISTRATION
2.1 3D Point and Normal Calculation
In this paper, we estimate the intial pose of a single
hand-held sensor by using color and depth informa-
tion at each viewpoint in a similar way to KinectFu-
sion. The overall initial pose estimation method is
schematically summarized in Figure 1. In this ap-
proach, we first reproject depth data into the 3D coor-
dinate system to represent 2D points as 3D points. If
we take D
i
representing the depth of the i
th
viewpoint,
we can calculate its 3D point according to Equa-
tion (1).
P
i
(x, y) = D
i
(x, y)K
−1
[x, y, 1]
T
(1)
K represents the intrinsic parameters of the IR (in-
frared) camera where (x,y) represents the pixel loca-
tion of the depth image. The normal of the reprojected
3D point - n
i
is calculated according to Equation (2).
n
i
(x, y) = (P
i
(x + 1, y) − P
i
(x, y)) ×
(P
i
(x, y + 1) − P
i
(x, y))
(2)
2.2 Sensor Pose Estimation using
Projection-based Point-to-Plane ICP
ICP is a popular 3D registration algorithm that is used
to minimize the difference between two point clouds.
According to the traditional algorithm, the closest
point of the current point cloud is calculated in its
previous point cloud, and regarded as a correspond-
ing point. A rigid transformation matrix T=[R|t] is
calculated that minimizes the distance between cor-
responding points, where R represents a 3×3 rota-
tion matrix and t represents a 3D translation vec-
tor. Notwithstanding this traditional version achieves
rigid registration with good accuracy and fast speed,
it fails to register two point clouds when there are
less overlapping areas and more noisy point sets
Figure 2: Calculation of arbitrary 3D point using a bilinear
interpolation method.
(shape noise). As a solution, we applied a Point-to-
Plane projective data association method (Chen and
Medioni, 1992) to find corresponding points instead
of using Euclidean distance. In general, point cloud
of the i
th
frame in the world coordinate is projected
onto its i − 1
th
depth image, and point of intersection
is regarded as the corresponding point. However, the
corresponding point is estimated by rounding due to
two factors: the point of intersection is calculated as a
real number, and the pixel locations of the depth im-
age is composed of integer numbers. This increases
the overall accumulating distance error and decreases
the performance accuracy of the algorithm. To solve
this problem, we interpolated depth data using bilin-
ear interpolation.
As shown in Figure 2, taking already known depth
values of adjacent pixels as d
xy
, the depth value of the
projected position d
0
can be calculated according to
Equation (3).
d
0
= d
11
(x
2
−x)(y
2
−y)
(x
2
−x
1
)(y
2
−y
1
)
+ d
21
(x−x
1
)(y
2
−y)
(x
2
−x
1
)(y
2
−y
1
)
+d
12
(x
2
−x)(y−y
1
)
(x
2
−x
1
)(y
2
−y
1
)
+ d
22
(x−x
1
)(y−y
1
)
(x
2
−x
1
)(y
2
−y
1
)
(3)
The converted point P
0
i−1
from i − 1
th
depth data
is regarded as the corresponding point of P
i
. Then,
transformation matrix T=[R|t] is calculated by min-
imizing the distance between corresponding points.
This transformation matrix is calculated such as
Point-to-Plane ICP error metric by minimizing Equa-
tion (4),
T = argmin
T
N
∑
i=1
n
i
(T · P
i
− P
0
i−1
)
(4)
where n
i
represents the normal of P
i
.
2.3 Model Representation and Fusion
Depth values and the ICP-based pose information are
necessary to fuse into a single consistent global coor-
dinate. In our approach, we used the TSDF (Curless
and Levoy, 1996) to fuse depth data. The volume con-
sists of several voxels of equal size. The Signed Dis-
tance Function (SDF) of each voxel can be calculated
using depth data and previously estimated pose infor-
mation at each view point. These values are positive
in front of the surface and negative behind the sur-
face, with the surface dened by zero-crossing where
the values change sign. We use only truncated regions
around the actual surface that are referred to in this
paper as TSDF. These calculated TSDF value at each
viewpoint are fused according to the method proposed
in (Curless and Levoy, 1996), which is summarized in
Equation (5), where weight w
i
is calculated according
to Equation (6).
Accurate Pose Estimation of a Hand-held RGBD Camera based on Sub-volume Matching for 3D Modeling
333

Figure 3: Selection of keyframe using uniform-sampling.
F
avg
=
F
i−1
w
i−1
+ F
i
w
i
w
i−1
+ w
i
(5)
w
i
= min(max weight, w
i−1
+ 1) (6)
2.4 Model Surface Estimation using
Raycasting
The reconstructed surface at current viewpoint us-
ing accumulated TSDF value consist of significant
noise. We improved the performance of pose estima-
tion through surface information and 3D reconstruc-
tion. A simple raycaster is implemented to estimate
surface information. When there is given a starting
point and the direction of the ray, we traverse along
the ray to extract position information of the implicit
surface by observing a change in the sign of TSDF
(known as zero-crossing) value. The final surface
intersection point is computed applying trilinear in-
terpolation on adjacent neighbor values of the zero-
crossing. A surface normal at zero-crossing is calcu-
lated directly as the gradient of the TSDF at a zero-
crossing.
Figure 4: Keyframe pose estimation using 3D registration
between subvolumes.
3 KEYFRAME-BASED 3D
VOLUME REGISTRATION
REFINEMENT
In the initial pose estimation step, the projected posi-
tion is regarded as a corresponding point, but in preci-
sion matching, the corresponding search uses a noise
robust nearest neighbor method. Moreover, 3D regis-
tration is performed only between keyframes without
using all the frames. As shown in Figure 3, keyframes
are selected by uniform sampling, one for each mul-
tiple frame of n, and initial pose of each selected
keyframe is initialized in the world coordinate sys-
tem. Then, pair-wise registration is sequentially per-
formed in between j
th
and j + 1
th
keyframes accord-
ing to Point-to-Plane ICP. However, the registration
may fail due to large error in initial pose, and lack
of overlapping areas. To overcome this problem, we
proposed a subvolumetric-based pose estimation.
Let us consider a general situation where pose es-
timation between two keyframes - k
j
and k
j+1
is failed
Figure 4. As shown in this figure, V
j
and V
j+1
repre-
sent two TSDF volumes generated using initial pose
of first and second keyframes - k
j
and k
j+1
, respec-
tively. Considering k
j
as the world coordinate, we
first selected an arbitrary m number of frames existing
in between two keyframes, and sequentially matched
with respect to the first keyframe (let us call these m
frames as interim frames). The pose of m frames are
estimated according to Point-to-Plane ICP algorithm.
Based on the estimated pose, the depth data ob-
tained at each time interval is fused into the subvol-
ume V
j
, and the transformation relation (relative pose)
between the first keyframe and respective f
i+m
frames
are stored accordingly. We repeated the same steps
again for the second keyframe and its corresponding
subvolume V
j+1
, but this time selecting k
j+1
as the
world coordinate.
We reconstructed 3D surfaces at two interim
frame intervals using the two subvolumes V
j
and V
j+1
,
and estimated the relative pose between two subvol-
umes. Finally, we calculated a more refined relative
pose between two keyframes using the estimated pose
between the volumes.
4 RESULT
All the experiments are done in a general purpose In-
tel i7-7700 computer running Windows 10 (64 bit)
with 16GB RAM and a Geforce GTX 980 Ti graph-
ics card. We used an Asus XtionPro to acquire depth
and RGB data. TSDF volume resolution in 3D ini-
Figure 5: Experiment model (left) pose estimation result of
the proposed method (middle) pose estimation result of ICP
method (right).
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
334
tial pose estimation step in real-time is 512x512x512,
and its area is determined experimentally between 1.2
∼ 1.8m in width and height. We obtained depth and
color data by moving the sensor in 360
◦
around the
model. Table.1 summarizes the nearest distance er-
ror between neighbor points for three different data
sets. Figure 5 shows the experiment model we used
and pose estimation results between our proposed and
ICP method. We can confirm that the points are
more precisely aligned in the mesh model created us-
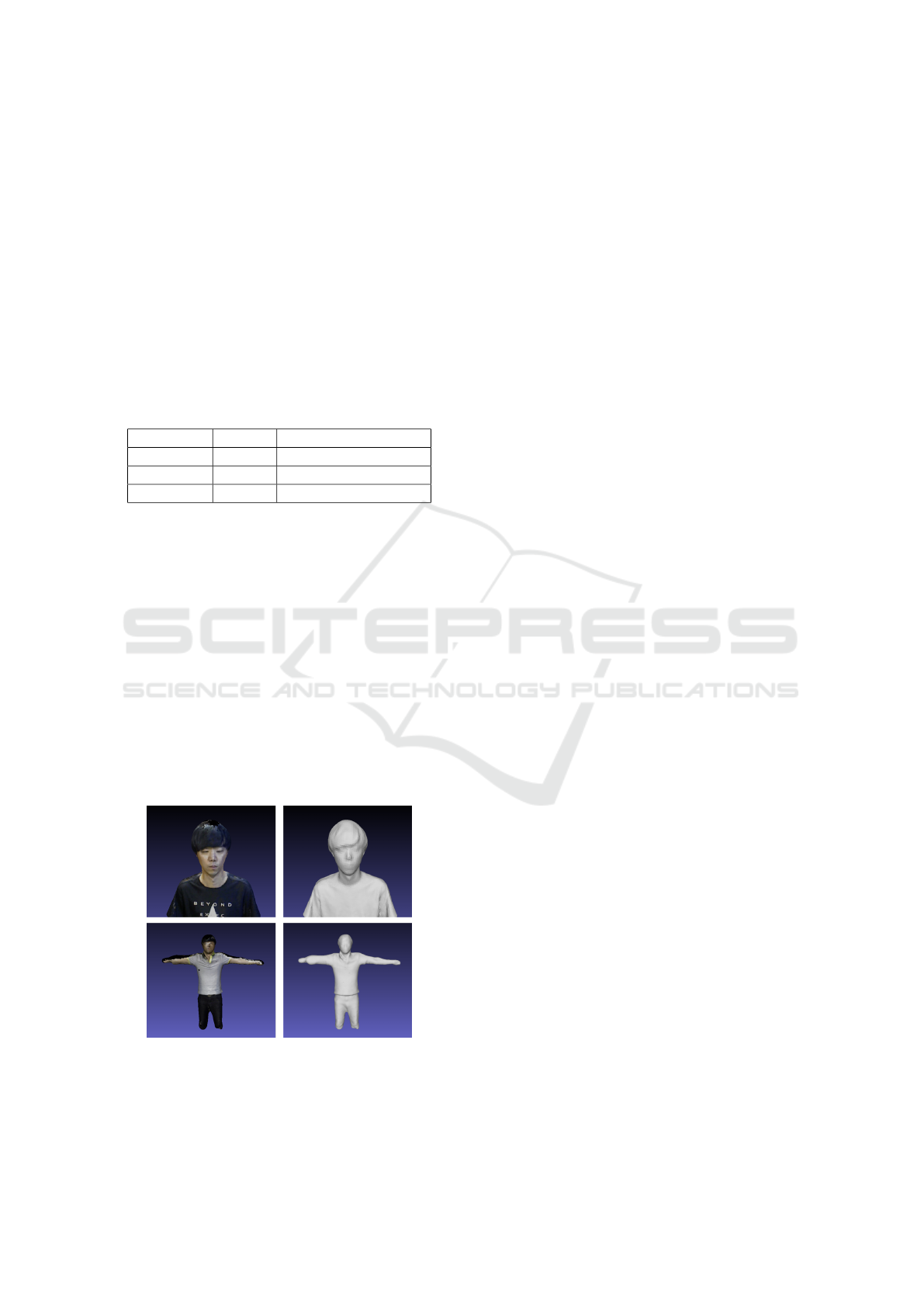
ing our method compared to ICP method. Figure 6
shows reconstruction results and their texture map-
pings done using color information corresponding to
each keyframe in Data 1 data set.
Table 1: The result of Pose estimation refinement.
Data name Frames Nearest distance error
Data 1 773 0.73
Data 2 972 0.81
Data 3 704 0.89
5 CONCLUSIONS
In this paper, we described an accurate real time 3D
pose estimation and refinement method using depth
and color information of a single hand-held sensor.
We first described about initial pose estimation of the
sensor at real time. We selected keyframes and esti-
mated their pose more robustly using Point-to-Plane
ICP algorithm. The accuracy of the estimated pose is
evaluated through experiment results such as 3D mesh
modelling and texture mapping. As future work, we
are planning to improve pose estimation and recon-
struction results by implementing non-rigid model
transformation techniques.
Figure 6: Keyframe pose estimation using 3D registra-
tion between subvolumes. Generated texture mapping
model(left) and mesh model(right).
ACKNOWLEDGEMENTS
This work was supported by ’The Cross-Ministry
Giga KOREA Project’ grant funded by the Korea gov-
ernment(MSIT) (No.GK17P0300, Real-time 4D re-
construction of dynamic objects for ultra-realistic ser-
vice).
REFERENCES
Chen, Y. and Medioni, G. (1992). Object modelling by reg-
istration of multiple range images. Image and vision
computing, 10(3):145–155.
Curless, B. and Levoy, M. (1996). A volumetric method for
building complex models from range images. In Pro-
ceedings of the 23rd annual conference on Computer
graphics and interactive techniques, pages 303–312.
ACM.
Dai, A., Chang, A. X., Savva, M., Halber, M., Funkhouser,
T., and Nießner, M. (2017a). Scannet: Richly-
annotated 3d reconstructions of indoor scenes. In
Proc. IEEE Conf. on Computer Vision and Pattern
Recognition (CVPR), volume 1.
Dai, A., Nießner, M., Zollh
¨
ofer, M., Izadi, S., and Theobalt,
C. (2017b). Bundlefusion: Real-time globally consis-
tent 3d reconstruction using on-the-fly surface rein-
tegration. ACM Transactions on Graphics (TOG),
36(3):24.
Maier, R., Sturm, J., and Cremers, D. (2014). Submap-
based bundle adjustment for 3d reconstruction from
rgb-d data. In German Conference on Pattern Recog-
nition, pages 54–65. Springer.
Newcombe, R. A., Izadi, S., Hilliges, O., Molyneaux, D.,
Kim, D., Davison, A. J., Kohi, P., Shotton, J., Hodges,
S., and Fitzgibbon, A. (2011). Kinectfusion: Real-
time dense surface mapping and tracking. pages 127–
136.
Nießner, M., Zollh
¨
ofer, M., Izadi, S., and Stamminger, M.
(2013). Real-time 3d reconstruction at scale using
voxel hashing. ACM Transactions on Graphics (ToG),
32(6):169.
Accurate Pose Estimation of a Hand-held RGBD Camera based on Sub-volume Matching for 3D Modeling
335
